
- Все об угловой скорости — определение, единица измерения, методы расчета
- Что такое угловая скорость
- Единица измерения
- Формула угловой скорости
- Зависимость угловой скорости от времени
- Угловая скорость вращения, формула
- Через частоту
- Через радиус
- Как определить направление угловой скорости
- Связь линейной и угловой скорости
- Чему равна мгновенная угловая скорость
- МЕТОДЫ ИЗМЕРЕНИЯ УГЛОВОЙ СКОРОСТИ ВРАЩЕНИЯ ВАЛА
Все об угловой скорости — определение, единица измерения, методы расчета
Что такое угловая скорость
Угловая скорость (обозначается как \(\omega\) ) — векторная величина, характеризующая скорость и направление изменения угла поворота со временем.
Модуль угловой скорости для вращательного движения совпадает с мгновенной угловой частотой вращения, а направление перпендикулярно плоскости вращения и связано с направлением вращения правилом правого винта.
Единица измерения
В Международной системе единиц (СИ) принятой единицей измерения угловой скорости является радиан в секунду (рад/с)
Осторожно! Если преподаватель обнаружит плагиат в работе, не избежать крупных проблем (вплоть до отчисления). Если нет возможности написать самому, закажите тут.
Формула угловой скорости
Вектор угловой скорости определяется отношением угла поворота \((\varphi)\) к интервалу времени \((\mathcal t)\) , за которое произошел поворот:
Зависимость угловой скорости от времени
Зависимость \(\varphi \) от \(\mathcal t\) наглядно показана на графике:
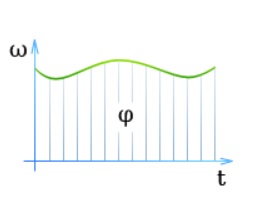
Угол, на который повернулось тело, характеризуется площадью под кривой.
Угловая скорость вращения, формула
Через частоту
\(\mathcal n\) — частота вращения \((1/с)\)
\(\pi\) — число Пи ( \(\approx 3,14\) )
\(T \) — период вращения (время, за которое тело совершает один оборот)
Через радиус
\(v\) — линейная скорость(м/с)
\(R\) — радиус окружности (м)
Как определить направление угловой скорости
Направление скорости в физике можно определять двумя способами:
- Правило буравчика. Буравчик имеет правую резьбу (вращательное движение вправо при закручивании). Если вращать буравчик в направлении вращения тела, он будет завинчиваться (или вывинчиваться) в ту сторону, куда направлена угловая скорость.
- Правило правой руки. Представим, что взяли тело в правую руку. Следует направлять и вращать его туда, куда указывают четыре пальца. Отведенный в сторону большой палец покажет направление угловой скорости при этом вращении.
Связь линейной и угловой скорости
Линейная скорость \((v)\) тела, расположенного на расстоянии \(R\) от оси вращения, прямо пропорциональна угловой скорости.
\(R\) — радиус окружности (м)
Чему равна мгновенная угловая скорость
Мгновенную угловую скорость нужно находить как предел, к которому стремится средняя угловая скорость при \(\triangle\mathcal t\rightarrow0\) :
Источник
МЕТОДЫ ИЗМЕРЕНИЯ УГЛОВОЙ СКОРОСТИ ВРАЩЕНИЯ ВАЛА




![]()
![]()
Рассмотрим следующие методы измерения угловой скорости вращения вала: центробежный, часовой, фрикционный, магнитный, индукционный, импульсный, стробоскопический и метод дифференцирования.
1. Центробежный метод [1]
Центробежный метод основан на зависимости центробежных сил от угловой скорости вращения инерционной массы.
Существуют две типовые схемы центробежных тахометров — тахометр конического типа и с кольцевым грузом.
В тахометре конического типа на вращающейся оси при помощи шарниров прикреплено несколько грузов (два, три или четыре), которые при наличии угловой скорости развивают центробежные силы и симметрично расходятся, перемещая вдоль оси муфту и сжимая пружину до тех пор, пока ее упругая сила не уравновесит центробежные силы (рис. 8.1, а).
Зависимость перемещения s муфты от угловой скорости  выражается формулой [1]
выражается формулой [1]
 ,
,
где n – число грузов,
m – масса одного груза,
с1 – коэффициент линейной жесткости пружины,
z0 – длина пружины в свободном состоянии,
r0 и l – размеры, обозначенные на рис. 8.1.
Для малых перемещений можно пренебречь величиной s по сравнению с z0 и тогда
 .
.
Из выражения (8.2) следует, что центробежный тахометр обладает квадратичной характеристикой.
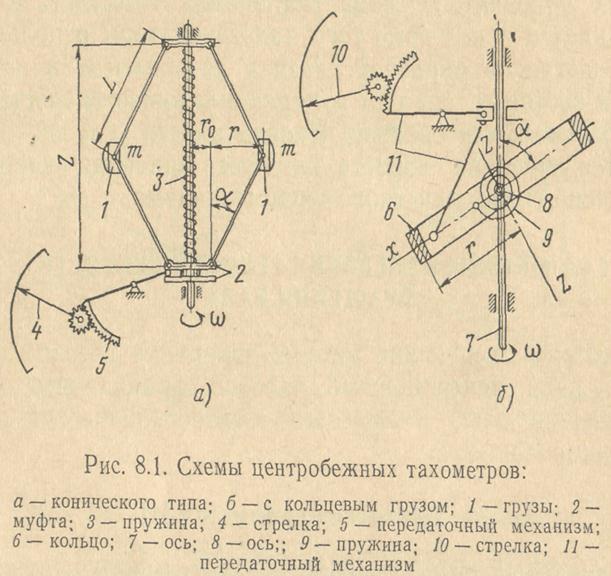
Схема центробежного тахометра с кольцевым грузом изображена рис. 8.1, б. На оси, связанной с контролируемым валом, помещен кольцевой груз, имеющий дополнительную степень свободы относительно поперечной оси, вращающейся вместе с основной осью. Когда кольцевой груз расположен под некоторым углом, а к основной оси (см. рис. 8.1, б), возникающие при его вращении инерционные силы создают вращающий момент Мвр относительно поперечной оси и стремятся повернуть кольцо так, чтобы его плоскость была перпендикулярна оси вращения. Вращающему моменту Мвр противодействует момент Мпр спиральной пружины; равновесие наступает при равенстве Мпр = Мвр, чему соответствует некоторый угол  .
.
Зависимость угла от угловой скорости для тахометра с кольцевым грузом также является квадратичной.
В динамическом отношении чувствительный элемент тахометра с кольцевым грузом, так же как и тахометра конического типа, в случае применения воздушного демпфера является колебательным звеном 3-го порядка (см.стр. 54).
2. Часовой метод [3]
Часовой метод измерения угловой скорости основан на зависимости угла поворота вала за фиксированный промежуток времени от угловой скорости его вращения.
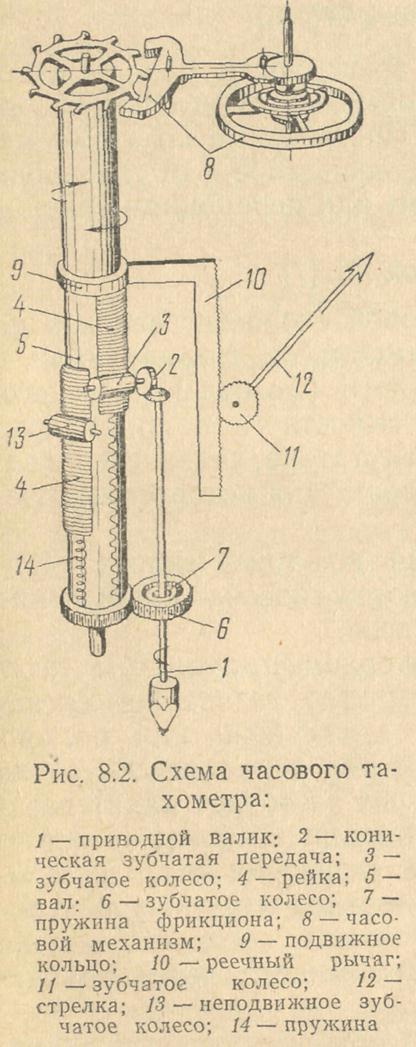
В часовых тахометрах временной интервал задается с помощью часового механизма, а величина накопленного за этот промежуток времени угла поворота вала передается на указывающую стрелку (рис. 8.2).
Часовые тахометры имеют линейную характеристику, их особенность — дискретность измерения (определение результата за контрольный интервал времени).
3. Фрикционный метод [3]
Фрикционный метод измерения угловой скорости основан на самовыравнивании (за счет трения
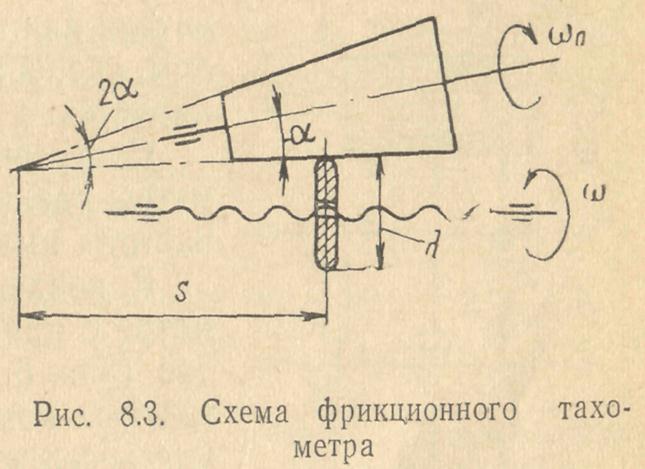
скольжения) окружной скорости вращения фрикционного ролика с окружной скоростью конуса, вращающегося с постоянной угловой скоростью  . Мерой измеряемой
. Мерой измеряемой
угловой скорости является величина s расстояния ролика от
вершины конуса (рис. 8. 3):
 ,
,
где d – диаметр ролика,
— угол конуса.
4. Магнитоиндукционный метод [1]
Магнитоиндукционныи метод основан на увлечении проводящего тела (цилиндра, диска и др.) полем вращающегося постоянного магнита благодаря взаимодействию наводимых в проводящем теле индукционных токов с магнитным полем постоянного магнита.
Построенные по этому методу магнитоиндукционные (магнитные) тахометры подробно рассматриваются в § 8.3.
5. Индукционныйметод [4], [5]
Индукционный метод основан на зависимости э. д. с, наводимой полем постоянного магнита в обмотке, от угловой скорости вращения магнита или обмотки. Построенные по этому методу тахогенераторы описаны в § 8.4; в зависимости от схемы они могут выдавать сигналы на постоянном или переменном токе.
6. Импульсный метод[2], [7]
Импульсный метод измерения угловой скорости основан на определении частоты электрических импульсов, формируемых с помощью контактного или бесконтактного (фотоэлектрического,

индуктивного, емкостного и др.) прерывателя или коммутатора, связанного с валом, скорость вращения которого контролируется.
Построенные по этому методу тахометры различаются способами измерения частоты импульсов.
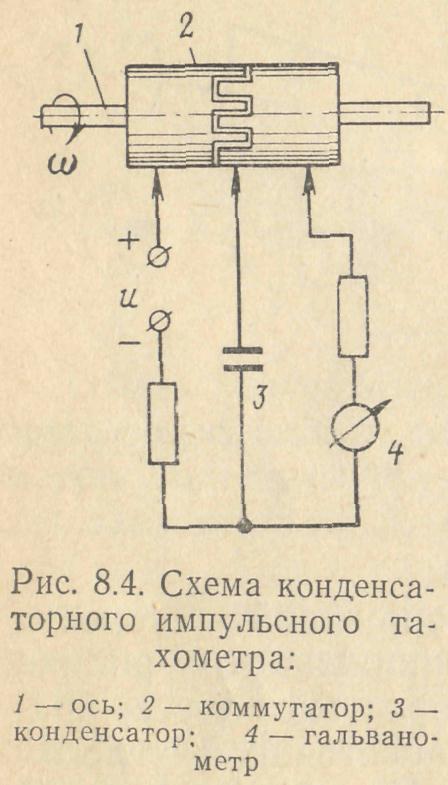
В конденсаторном импульсном тахометре с прямым преобразованием сигналов (рис. 8.4) контактный или бесконтактный коммутатор периодически (один или несколько раз за оборот вала) переключает конденсатор на заряд от источника питания и на разряд через измеритель тока (гальванометр). Мерой угловой скорости служит среднее значение силы тока, протекающего через гальванометр.
В конденсаторном импульсном тахометре компенсационного типа среднее
значение напряжения, создающегося на конденсаторе при его периодической коммутации, уравновешивается (автоматически) с помощью самобалансирующейся мостовой схемы со следящим электроприводом.
Для повышения точности измерения используются стабильные слюдяные конденсаторы с температурным коэффициентом емкости не более 50• 10 -6 на 1 0 С.
В импульсных тахометрах в качестве коммутатора может быть использован тахогенератор переменного тока с вращающимся магнитом; синусоидальное напряжение, выдаваемое тахогенератором, используется для управления полупроводниковыми ключами.
7. Стробоскопический метод [6]
Стробоскопический метод основан на явлении кажущейся неподвижности вращающегося тела при его периодическом наблюдении в течение коротких промежутков времени с частотой, равной или кратной частоте вращения (числу оборотов за 1 сек).
Различают стробоскопы с механическим затвором, через который наблюдается вращающееся тело, с механическим обтюратором, прерывающим луч света, освещающий вращающееся тело, и с электронной схемой, управляющей частотой вспышек осветительной газонаполненной лампы, освещающей вращающееся тело.
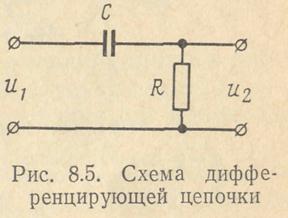
8. Метод дифференцирования
Метод дифференцирования основан на дифференцировании сигнала позиционного датчика (потенциометрического, индуктивного или др.).
Метод применим при ограниченной величине углового перемещения контролируемого вала; примером простейшей схемы является пассивная цепочка R—С (рис. 8.5), дифференцирующая напряжение
постоянного тока, снимаемое с потенциометра.
Передаточная функция такого дифференциатора
 ,
,
где Rn — внутреннее сопротивление потенциометра.
Для построения дистанционных тахометров на летательных аппаратах используется в основном магнитоиндукционный метод благодаря его простоте и линейной зависимости показания прибора от угловой скорости.
В качестве датчиков систем автоматического управления и следящих систем используются тахогенераторы постоянного и переменного тока, основанные на индукционном методе.
В устройствах с ограниченной величиной перемещения вала применяют иногда схемы электрического дифференцирования.
Определенную перспективу имеют импульсные методы, особенно в связи с развитием цифровых вычислительных машин.
Центробежный, часовой, фрикционный и стробоскопический методы измерения угловой скорости вращения вала не получили развития на летательных аппаратах по тем или другим причинам (громоздкость, неудобства монтажа, трудность автоматизации измерений, нелинейность характеристик, увеличенные погрешности и т. п.).
Рассмотрим более подробно магнитоиндукционные тахометры и тахогенераторы.
§ 8.3. МАГНИТОИНДУКЦИОННЫЕ ТАХОМЕТРЫ 1. Схемы и характеристики магнитоиндукционных тахометров
Применяются два варианта магнитоиндукционных тахометров — с цилиндрическим чувствительным элементом и с дисковым (рис. 8.6).
В первом варианте (см. рис. 8.6, а) на вращающейся оси укреплена магнитная система, состоящая из постоянного магнита с одной, двумя или тремя парами полюсов и кольцевого экрана из мягкого железа, через который замыкается магнитный поток магнита.
В кольцевом воздушном зазоре между магнитом и экраном расположен тонкостенный токопроводящий цилиндр, укрепленный на отдельной оси, соосной с осью магнитной системы. Ось цилиндра несет на себе также указывающую стрелку и связана со- спиральной противодействующей пружиной.
При вращении магнитной системы с угловой скоростью а в токопроводящем цилиндре наводится электродвижущая сила е, вызывающая ток I, замыкающийся в теле цилиндра; в результате взаимодействия тока i с магнитным полем постоянного магнита создается движущий момент Мяв, стремящийся увлечь цилиндр вслед за вращающейся магнитной системой; этому препятствует пружина, развивающая противодействующий момент Мпр. В результате подвижная система (цилиндр вместе с указывающей стрелкой) поворачивается на некоторый угол  , величина которого определяется равновесием моментов Мпр = Мдв.
, величина которого определяется равновесием моментов Мпр = Мдв.
Зависимость  является статической характеристикой (уравнением шкалы) прибора. Для определения этой зависимости рассмотрим картину протекания индукционных токов на схеме на рис. 8.7, а, где изображена поверхность цилиндра, развернутая в виде токопроводящей ленты.
является статической характеристикой (уравнением шкалы) прибора. Для определения этой зависимости рассмотрим картину протекания индукционных токов на схеме на рис. 8.7, а, где изображена поверхность цилиндра, развернутая в виде токопроводящей ленты.
Будем считать магнитную систему неподвижной, а ленту — движущейся с линейной скоростью  —, где D — диаметр цилиндра.
—, где D — диаметр цилиндра.
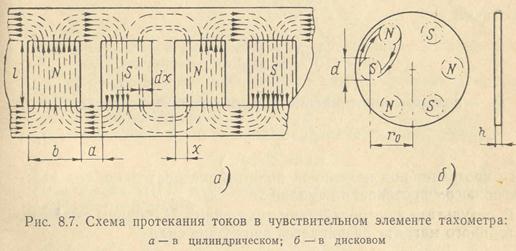
Магнитный поток пронизывает ленту перпендикулярно к плоскости чертежа; области, внутри которых действует поток, ограничены на схеме прямоугольниками, изображающими проекции полюсов постоянного магнита на поверхность ленты.
Выделим в ленте над поверхностью полюса, на расстоянии х от его края, узкую полоску шириной dx и толщиной  , равной толщине стенки цилиндра.
, равной толщине стенки цилиндра.
При движении ленты со скоростью v в полоске будет наводиться э. д. с.
 ,
,
где В — магнитная индукция в рабочем зазоре;
l — длина полюса постоянного магнита.
Поскольку магнитный поток над соседним полюсом имеет противоположное направление, то э. д. с, наводимая в аналогичной полоске, расположенной на расстоянии х от края соседнего полюса, будет такой же величины, т. е. е2=е1.
В итоге под действием э. д. с. е1 и е2 образуется короткозамкнутый элементарный виток тока
 .
.
Источник



