
МЕТОДЫ ИЗМЕРЕНИЯ УГЛОВОЙ СКОРОСТИ ВРАЩЕНИЯ ВАЛА




![]()
![]()
Рассмотрим следующие методы измерения угловой скорости вращения вала: центробежный, часовой, фрикционный, магнитный, индукционный, импульсный, стробоскопический и метод дифференцирования.
1. Центробежный метод [1]
Центробежный метод основан на зависимости центробежных сил от угловой скорости вращения инерционной массы.
Существуют две типовые схемы центробежных тахометров — тахометр конического типа и с кольцевым грузом.
В тахометре конического типа на вращающейся оси при помощи шарниров прикреплено несколько грузов (два, три или четыре), которые при наличии угловой скорости развивают центробежные силы и симметрично расходятся, перемещая вдоль оси муфту и сжимая пружину до тех пор, пока ее упругая сила не уравновесит центробежные силы (рис. 8.1, а).
Зависимость перемещения s муфты от угловой скорости  выражается формулой [1]
выражается формулой [1]
 ,
,
где n – число грузов,
m – масса одного груза,
с1 – коэффициент линейной жесткости пружины,
z0 – длина пружины в свободном состоянии,
r0 и l – размеры, обозначенные на рис. 8.1.
Для малых перемещений можно пренебречь величиной s по сравнению с z0 и тогда
 .
.
Из выражения (8.2) следует, что центробежный тахометр обладает квадратичной характеристикой.
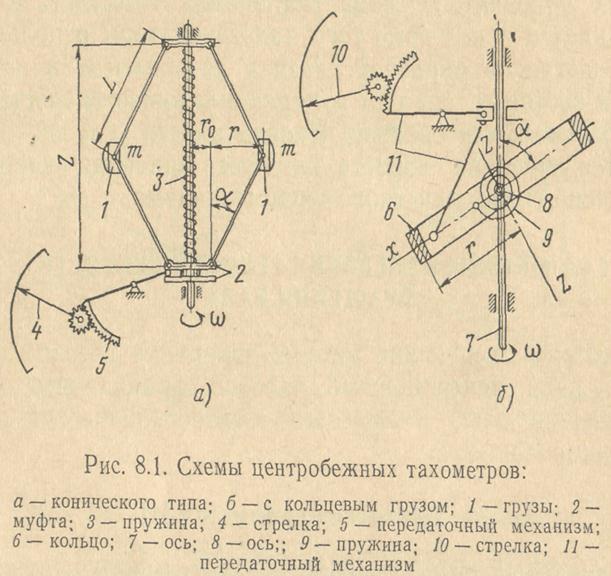
Схема центробежного тахометра с кольцевым грузом изображена рис. 8.1, б. На оси, связанной с контролируемым валом, помещен кольцевой груз, имеющий дополнительную степень свободы относительно поперечной оси, вращающейся вместе с основной осью. Когда кольцевой груз расположен под некоторым углом, а к основной оси (см. рис. 8.1, б), возникающие при его вращении инерционные силы создают вращающий момент Мвр относительно поперечной оси и стремятся повернуть кольцо так, чтобы его плоскость была перпендикулярна оси вращения. Вращающему моменту Мвр противодействует момент Мпр спиральной пружины; равновесие наступает при равенстве Мпр = Мвр, чему соответствует некоторый угол  .
.
Зависимость угла от угловой скорости для тахометра с кольцевым грузом также является квадратичной.
В динамическом отношении чувствительный элемент тахометра с кольцевым грузом, так же как и тахометра конического типа, в случае применения воздушного демпфера является колебательным звеном 3-го порядка (см.стр. 54).
2. Часовой метод [3]
Часовой метод измерения угловой скорости основан на зависимости угла поворота вала за фиксированный промежуток времени от угловой скорости его вращения.
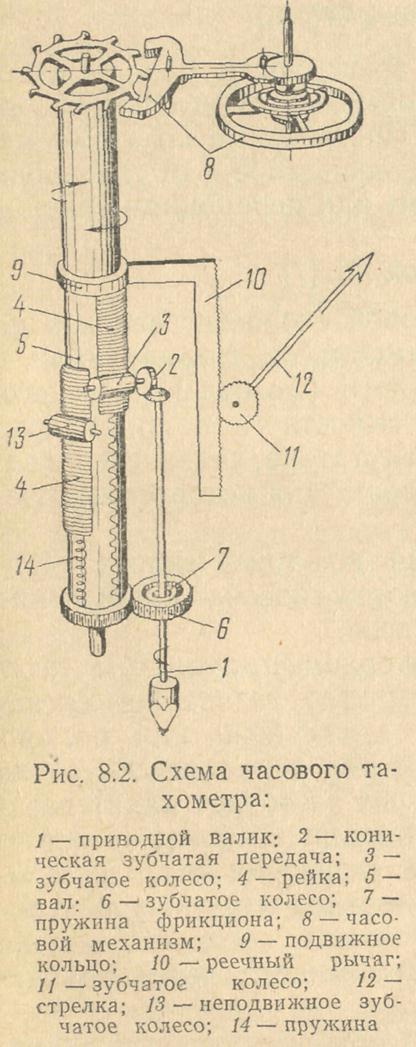
В часовых тахометрах временной интервал задается с помощью часового механизма, а величина накопленного за этот промежуток времени угла поворота вала передается на указывающую стрелку (рис. 8.2).
Часовые тахометры имеют линейную характеристику, их особенность — дискретность измерения (определение результата за контрольный интервал времени).
3. Фрикционный метод [3]
Фрикционный метод измерения угловой скорости основан на самовыравнивании (за счет трения
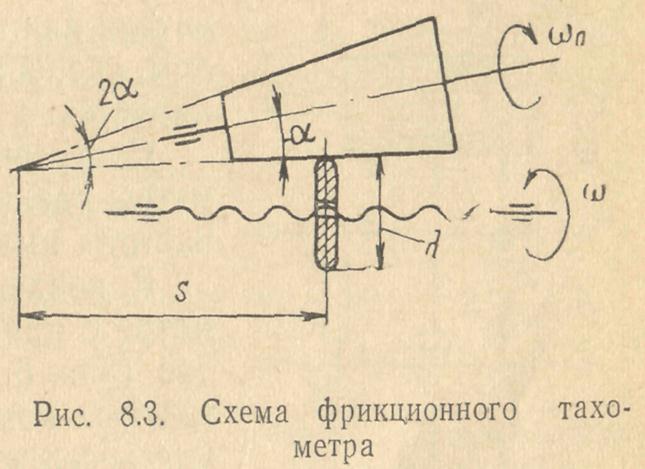
скольжения) окружной скорости вращения фрикционного ролика с окружной скоростью конуса, вращающегося с постоянной угловой скоростью  . Мерой измеряемой
. Мерой измеряемой
угловой скорости является величина s расстояния ролика от
вершины конуса (рис. 8. 3):
 ,
,
где d – диаметр ролика,
— угол конуса.
4. Магнитоиндукционный метод [1]
Магнитоиндукционныи метод основан на увлечении проводящего тела (цилиндра, диска и др.) полем вращающегося постоянного магнита благодаря взаимодействию наводимых в проводящем теле индукционных токов с магнитным полем постоянного магнита.
Построенные по этому методу магнитоиндукционные (магнитные) тахометры подробно рассматриваются в § 8.3.
5. Индукционныйметод [4], [5]
Индукционный метод основан на зависимости э. д. с, наводимой полем постоянного магнита в обмотке, от угловой скорости вращения магнита или обмотки. Построенные по этому методу тахогенераторы описаны в § 8.4; в зависимости от схемы они могут выдавать сигналы на постоянном или переменном токе.
6. Импульсный метод[2], [7]
Импульсный метод измерения угловой скорости основан на определении частоты электрических импульсов, формируемых с помощью контактного или бесконтактного (фотоэлектрического,
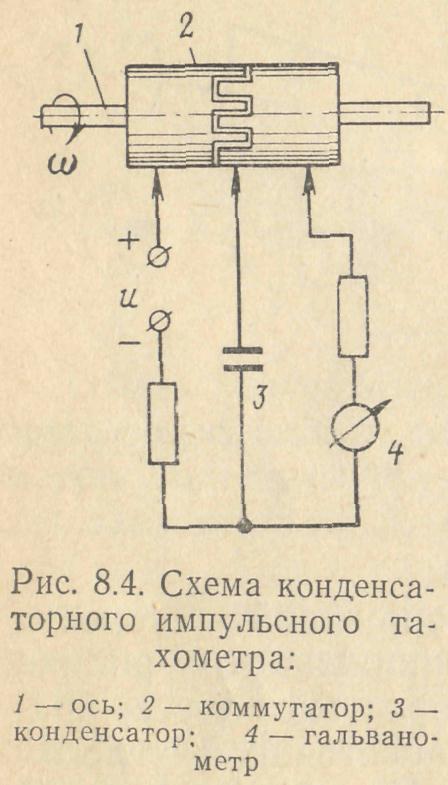
индуктивного, емкостного и др.) прерывателя или коммутатора, связанного с валом, скорость вращения которого контролируется.
Построенные по этому методу тахометры различаются способами измерения частоты импульсов.
В конденсаторном импульсном тахометре с прямым преобразованием сигналов (рис. 8.4) контактный или бесконтактный коммутатор периодически (один или несколько раз за оборот вала) переключает конденсатор на заряд от источника питания и на разряд через измеритель тока (гальванометр). Мерой угловой скорости служит среднее значение силы тока, протекающего через гальванометр.
В конденсаторном импульсном тахометре компенсационного типа среднее
значение напряжения, создающегося на конденсаторе при его периодической коммутации, уравновешивается (автоматически) с помощью самобалансирующейся мостовой схемы со следящим электроприводом.
Для повышения точности измерения используются стабильные слюдяные конденсаторы с температурным коэффициентом емкости не более 50• 10 -6 на 1 0 С.
В импульсных тахометрах в качестве коммутатора может быть использован тахогенератор переменного тока с вращающимся магнитом; синусоидальное напряжение, выдаваемое тахогенератором, используется для управления полупроводниковыми ключами.
7. Стробоскопический метод [6]
Стробоскопический метод основан на явлении кажущейся неподвижности вращающегося тела при его периодическом наблюдении в течение коротких промежутков времени с частотой, равной или кратной частоте вращения (числу оборотов за 1 сек).
Различают стробоскопы с механическим затвором, через который наблюдается вращающееся тело, с механическим обтюратором, прерывающим луч света, освещающий вращающееся тело, и с электронной схемой, управляющей частотой вспышек осветительной газонаполненной лампы, освещающей вращающееся тело.
8. Метод дифференцирования
Метод дифференцирования основан на дифференцировании сигнала позиционного датчика (потенциометрического, индуктивного или др.).
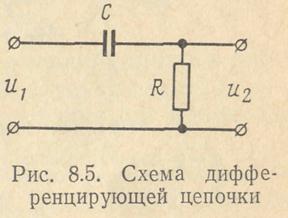
Метод применим при ограниченной величине углового перемещения контролируемого вала; примером простейшей схемы является пассивная цепочка R—С (рис. 8.5), дифференцирующая напряжение
постоянного тока, снимаемое с потенциометра.
Передаточная функция такого дифференциатора
 ,
,
где Rn — внутреннее сопротивление потенциометра.
Для построения дистанционных тахометров на летательных аппаратах используется в основном магнитоиндукционный метод благодаря его простоте и линейной зависимости показания прибора от угловой скорости.
В качестве датчиков систем автоматического управления и следящих систем используются тахогенераторы постоянного и переменного тока, основанные на индукционном методе.
В устройствах с ограниченной величиной перемещения вала применяют иногда схемы электрического дифференцирования.
Определенную перспективу имеют импульсные методы, особенно в связи с развитием цифровых вычислительных машин.
Центробежный, часовой, фрикционный и стробоскопический методы измерения угловой скорости вращения вала не получили развития на летательных аппаратах по тем или другим причинам (громоздкость, неудобства монтажа, трудность автоматизации измерений, нелинейность характеристик, увеличенные погрешности и т. п.).
Рассмотрим более подробно магнитоиндукционные тахометры и тахогенераторы.
§ 8.3. МАГНИТОИНДУКЦИОННЫЕ ТАХОМЕТРЫ 1. Схемы и характеристики магнитоиндукционных тахометров
Применяются два варианта магнитоиндукционных тахометров — с цилиндрическим чувствительным элементом и с дисковым (рис. 8.6).
В первом варианте (см. рис. 8.6, а) на вращающейся оси укреплена магнитная система, состоящая из постоянного магнита с одной, двумя или тремя парами полюсов и кольцевого экрана из мягкого железа, через который замыкается магнитный поток магнита.
В кольцевом воздушном зазоре между магнитом и экраном расположен тонкостенный токопроводящий цилиндр, укрепленный на отдельной оси, соосной с осью магнитной системы. Ось цилиндра несет на себе также указывающую стрелку и связана со- спиральной противодействующей пружиной.
При вращении магнитной системы с угловой скоростью а в токопроводящем цилиндре наводится электродвижущая сила е, вызывающая ток I, замыкающийся в теле цилиндра; в результате взаимодействия тока i с магнитным полем постоянного магнита создается движущий момент Мяв, стремящийся увлечь цилиндр вслед за вращающейся магнитной системой; этому препятствует пружина, развивающая противодействующий момент Мпр. В результате подвижная система (цилиндр вместе с указывающей стрелкой) поворачивается на некоторый угол  , величина которого определяется равновесием моментов Мпр = Мдв.
, величина которого определяется равновесием моментов Мпр = Мдв.
Зависимость  является статической характеристикой (уравнением шкалы) прибора. Для определения этой зависимости рассмотрим картину протекания индукционных токов на схеме на рис. 8.7, а, где изображена поверхность цилиндра, развернутая в виде токопроводящей ленты.
является статической характеристикой (уравнением шкалы) прибора. Для определения этой зависимости рассмотрим картину протекания индукционных токов на схеме на рис. 8.7, а, где изображена поверхность цилиндра, развернутая в виде токопроводящей ленты.
Будем считать магнитную систему неподвижной, а ленту — движущейся с линейной скоростью  —, где D — диаметр цилиндра.
—, где D — диаметр цилиндра.
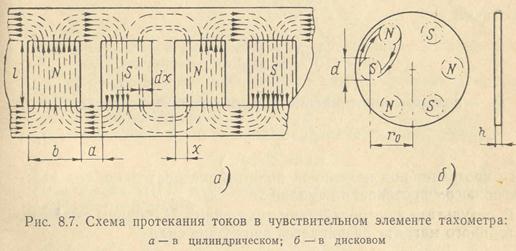
Магнитный поток пронизывает ленту перпендикулярно к плоскости чертежа; области, внутри которых действует поток, ограничены на схеме прямоугольниками, изображающими проекции полюсов постоянного магнита на поверхность ленты.
Выделим в ленте над поверхностью полюса, на расстоянии х от его края, узкую полоску шириной dx и толщиной  , равной толщине стенки цилиндра.
, равной толщине стенки цилиндра.
При движении ленты со скоростью v в полоске будет наводиться э. д. с.
 ,
,
где В — магнитная индукция в рабочем зазоре;
l — длина полюса постоянного магнита.
Поскольку магнитный поток над соседним полюсом имеет противоположное направление, то э. д. с, наводимая в аналогичной полоске, расположенной на расстоянии х от края соседнего полюса, будет такой же величины, т. е. е2=е1.
В итоге под действием э. д. с. е1 и е2 образуется короткозамкнутый элементарный виток тока
 .
.
Источник
БЛОГ ЭЛЕКТРОМЕХАНИКА
Блог судового электромеханика. Электроника, электромеханика и автоматика на судне. Обучение и практика. В помощь студентам и специалистам
30.10.2011
Приборы для измерения частоты вращения

В зависимости от места установки тахометра и способа применения тахометры подразделяют на стационарные, дистанционные и ручные. По принципу действия, различают механические (центробежные), магнитные, магнитно-индукционные, электрические и электронные тахометры.
Принцип действия механических тахометров основан на использовании центробежных сил, пропорциональных квадрату угловой скорости, действующих на центробежные расходящиеся грузы (наклонное кольцо), находящиеся на валу и вращающиеся вместе с ним вокруг оси, (рис. 1, а). Чувствительным элементом является кольцо 1 на оси 2, проходящей через приводной валик 3. Кольцо нагружено спиральной пружиной 4 и связано тягой 5 с подвижной муфтой 6. При вращении валика кольцо стремится занять положение, перпендикулярное к оси вращения. Муфта через промежуточное кольцо 9 и зубчатую рейку 7 входит в зацепление с шестерней 10, на оси которой закреплена стрелка 8, движущаяся вдоль шкалы прибора (градуирована в об/мин.). Тахометр закреплен неподвижно, а вал 3 приводится во вращение через передачу от вала двигателя.

При установившемся режиме центробежная сила, действующая на вращающееся кольцо 1, уравновешивается силой действия спиральной пружины, и стрелка тахометра неподвижна. При изменении частоты вращения вала равновесие сил нарушается, вызывая разворот кольца относительно оси 2 на угол α и соответствующий разворот стрелки 8 прибора. Механические центробежные измерительные приборы обладают нелинейной статической характеристикой, поэтому их шкала неравномерная.
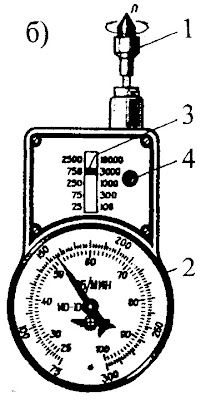
Периодический контроль частоты вращения и проверку стационарных тахометров производят механическим центробежным ручным тахометром (рис. 1, б), прижимая наконечник 1 к торцу вращающегося вала. В корпус 2 встроен редуктор с переключающим устройством, позволяющий менять передаточное отношение от наконечника 1 к чувствительному элементу для измерения в пяти диапазонах частоты вращения от 25 до 10000 об/мин. Переключают редуктор и устанавливают указатель 3 путем перемещения вдоль оси наконечника приводного вала при нажатой кнопке 4. В зависимости от установленного диапазона частоты вращения показания прибора определяют по одной из двух шкал.
К преимуществам механических тахометров относится высокая точность показаний, а к недостаткам — невозможность дистанционного отсчета.
Магнитоиндукционный тахометр имеет равномерную шкалу. В тахометре (рис. 2.) вращение от приводного вала 1 через конические шестерни и вал 2 передается ротору с постоянными магнитами 3, между которыми на оси 10 находится алюминиевый диск 4.

Под действием вращающегося поля магнитов в диске индуцируется электрический ток, создающий свое магнитное поле. Сила взаимодействия магнитных полей уравновешивается силой действия волосковой пружины 5, один конец которой закреплен на оси 10, а другой — в корпусе прибора.
Пропорционально частоте вращения приводного вала 1 изменяются действующие силы, разворот диска 4, оси 10 и жестко связанной с ней стрелки 7 вдоль шкалы 8.
В прибор вмонтирован магнитоиндукционный успокоитель, состоящий из алюминиевого диска 9, закрепленного на валу 10, и неподвижной системы с постоянными магнитами 6. При движении в диске 9 индуцируется ток и создается магнитное поле, взаимодействующее с полем постоянных магнитов. А так как сила взаимодействия этих полей направлена в сторону, противоположную движению диска, то происходит торможение колебаний стрелки прибора.
Дистанционные магнитоиндукционные тахометры
Дистанционное измерение частоты вращения основано на принципе электрической дистанционной передачи вращения вала двигателя валу магнитно-индукционного измерительного узла измерителя и преобразования частоты вращения вала в угловые перемещения стрелки измерителя.

Тахометр работает следующим образом (рис. 3): в обмотке статора 11 датчика при вращении ротора 15 возбуждается трехфазовый ток с частотой, пропорциональной частоте вращения вала двигателя. Ток по трем проводам приводится к обмотке статора 12 синхронного серводвигателя.
Частота вращения магнитного поля статора измерителя пропорциональна частоте токов в обмотках фазы. Ротор двигателя измерителя вращается с частотой, синхронной вращению магнитного поля статора. На конце вала ротора двигателя укреплен магнитный узел 2 с шестью парами постоянных магнитов, между полюсами которых расположен чувствительный элемент 8. При вращении магнитного узла в чувствительном элементе индуцируются вихревые токи. В результате взаимодействия вихревых токов с магнитным полем магнитного узла создается вращающий момент чувствительного элемента. Вращающему моменту чувствительного элемента противодействует спиральная пружина 7, — один конец которой укреплен на оси чувствительного элемента, другой — неподвижен. Так как момент спиральной пружины пропорционален углу ее закручивания, то угол поворота чувствительного элемента пропорционален частоте вращения магнитного узла, и соответствует частоте вращения вала двигателя. На другом конце оси чувствительного элемента укреплена стрелка 5, показывающая по равномерной шкале 4 измерителя частоту вращения вала двигателя.
Для повышения устойчивости стрелки и улучшения отсчета показаний прибора применено демпфирование подвижной системы измерителя. При движении подвижной системы магнитный поток магнита 6 наводит в алюминиевом диске 3 вихревые токи, которые взаимодействуют с магнитным полем магнитов, и в подвижной системе возникает тормозящий момент. Ротор состоит из двух постоянных магнитов 13 и трех гистерезисных дисков 14, соединенных вместе. Взаимодействие ротора с магнитным полем статора — определяется взаимодействием магнитных полей постоянных магнитов статора и гистерезисных дисков.
Электрические тахометры служат для дистанционного контроля направления и частоты вращения валов в диапазоне до 1500 об/мин. Датчиками в них служат тахогенераторы — миниатюрные генераторы переменного или постоянного тока, вырабатывающие напряжение, пропорциональное частоте вращения вала. Указателями являются магнитоэлектрические вольтметры со шкалой, градуированной в единицах частоты вращения.

В тахометре (рис. 4, а) тахогенератор 3 постоянного тока, приводимый во вращение от вала через цепной привод 2, является датчиком частоты вращения вала 1. К нему может быть подключено до восьми указателей — вольтметров 4 постоянного тока, размещенных по судну. Передаточное отношение от вала 1 к датчику определяется соотношением числа зубьев звездочек цепного привода и должно быть таким, чтобы номинальные частоты вращения вала и якоря датчика совпадали. Если при номинальной частоте вращения вала напряжение, вырабатываемое датчиком, не равно (30±0,1) В, то необходимо корректировать положение магнитного шунта. При правом и левом вращении якоря с номинальной частотой разность напряжений не должна превышать 0,1 В. В противном случае, необходимо корректировать нейтральное положение траверсы щеткодержателей.
В электрическом генераторе переменного тока 5 (рис. 4, б), ротором является постоянный магнит 7, установленный неподвижно на валу, а статором — стальные неподвижные полосы 6. Тахогенераторы постоянного тока вместо обмоток возбуждения имеют постоянные магниты. В результате большого количества ламелей коллектора и особых форм вырезов канавок вырабатывается постоянное напряжение с небольшими пульсациями, которое пропорционально частоте вращения. Преимущество датчиков постоянного тока — получение поляризованного напряжения, т. е. одновременно определяется и направление вращения; недостаток — сбои в работе коллектора. Передача от вала должна быть без скольжения (шестеренчатая, цепная). В тахогенераторах переменного тока это возможно только при наличии двух обмоток со сдвигом фаз 90°. Переменное напряжение должно быть выпрямлено в мостиковой схеме. Разность напряжений обоих гальванически разделенных контуров измеряется прибором с двумя поворотными катушками. Напряжение на выводах тахогенератора зависит от количества подключенных показывающих приборов. Поэтому в корпусе тахогенератора устанавливается нагрузочный резистор, который можно включать или выключать. Имеется также резистор для поднастройки показаний.
Для суммирования числа оборотов вала двигателя или механизма применяют специальные счетчики оборотов. Упрощенная принципиальная схема дистанционного электромеханического счетчика представлена на рис. 5.
На валу 9 жестко закреплены храповое колесо 5 и цифровой барабан 7, а цифровые барабаны 6 свободно насажены на вал. Барабаны кинематически соединены между собой так, что при полном обороте каждого из них соседний слева разворачивается на 1/10 оборота. На каждый барабан нанесены цифры от 0 до 9. Таким образом обеспечивается десятичная система отсчета. Число читается в рамке прибора 8. Колесо 5 входит в зацепление с храповиком 3, который в одну сторону перемещается под действием пружины 4, а в другую — якорем 2 электромагнитной катушки 1. Катушка получает питание Uп от сети через герметичные контакты выключателя 13. В выключателе на пластинчатой пружине с контактом закреплен постоянный магнит 12. Выключатель крепится к корпусу двигателя таким образом, чтобы между якорем 12 и стальным штифтом 10 вала 11 был установлен зазор, обеспечивающий притягивание якоря и замыкание цепи питания катушки 1.

Широко распространены магнитоуправляемые контакты (герконы). Прибор представляет собой две тонкие пермалоевые пластины с небольшим зазором между концами, впаянные в стеклянную колбу, из которой выкачан воздух (в некоторых приборах колбу заполняют инертным газом). При появлении вблизи геркона магнитного поля постоянного или электрического магнита происходит взаимное притягивание (прогиб) пластин и замыкание контактов. Постоянный магнит крепится на вращающемся валу 11 вместо штифта 10.
При каждом обороте вала независимо от направления его вращения катушка 1, получив питание, втягивает якорь 2 и смещает храповик 3 на один зуб колеса 5. При обесточивании катушки храповик под действием пружины 4 смещается в первоначальное положение, разворачивает колесо 5, вал 9 и барабан 7 на 1/10 оборота, что приводит к изменению показаний счетчика на одну единицу. Через один оборот барабана 7 соседний барабан 6 разворачивается на 1/10 оборота, отсчитав 10 оборотов вала 11, и т. д.
Источник



