
- Как определить скорость вращения электродвигателя Под скоростью вращения асинхронного электродвигателя обычно понимают угловую частоту вращения его ротора, которая приведена на шильдике (на паспортной табличке двигателя) в виде количества оборотов в минуту. Трехфазный двигатель можно питать и от однофазной сети, для этого достаточно добавить конденсатор параллельно одной или двум его обмоткам, в зависимости от напряжения сети, но конструкция двигателя от этого не изменится. Так, если ротор под нагрузкой совершает 2760 оборотов в минуту, то угловая частота данного двигателя будет равна 2760*2пи/60 радиан в секунду, то есть 289 рад/с, что не удобно для восприятия, поэтому на табличке пишут просто «2760 об/мин». Применительно к асинхронному электродвигателю, это обороты с учетом скольжения s. Синхронная же скорость данного двигателя (без учета скольжения) будет равна 3000 оборотов в минуту, поскольку при питании обмоток статора сетевым током с частотой 50 Гц, каждую секунду магнитный поток будет совершать по 50 полных циклических изменений, а 50*60 = 3000, вот и получается 3000 оборотов в минуту — синхронная скорость асинхронного электродвигателя. В рамках данной статьи мы поговорим о том, как определить синхронную скорость вращения неизвестного асинхронного трехфазного двигателя, просто взглянув на его статор. По внешнему виду статора, по расположению обмоток, по количеству пазов, — можно легко определить синхронные обороты электродвигателя если у вас нет под рукой тахометра. Итак, начнем по порядку и разберем данный вопрос с примерами. 3000 оборотов в минуту Про асинхронные электродвигатели (смотрите — Виды электродвигателей) принято говорить, что тот или иной двигатель имеет одну, две, три или четыре пары полюсов. Минимум — одна пара полюсов, то есть минимум — два полюса. Взгляните на рисунок. Здесь вы видите, что в статор уложено по две последовательно соединенные катушки на каждую фазу — в каждой паре катушек одна расположена напротив другой. Эти катушки и образуют по паре полюсов на статоре. Одна из фаз показана для ясности красным цветом, вторая — зеленым, третья — черным. Обмотки всех трех фаз устроены одинаково. Поскольку три эти обмотки питаются по очереди (ток трехфазный), то за 1 колебание из 50 в каждой из фаз — магнитный поток статора один раз обернется на полные 360 градусов, то есть совершит один оборот за 1/50 секунды, значит 50 оборотов получится за секунду. Так и выходит 3000 оборотов в минуту. Таким образом становится ясно, что для определения синхронных оборотов асинхронного электродвигателя достаточно определить количество пар его полюсов, что легко сделать, сняв крышку и взглянув на статор. Общее число пазов статора разделите на число пазов, приходящихся на одну секцию обмотки одной из фаз. Если получится 2, то перед вами двигатель с двумя полюсами — с одной парой полюсов. Следовательно синхронная частота составляет 3000 оборотов в минуту или примерно 2910 с учетом скольжения. В простейшем случае 12 пазов, по 6 пазов на катушку, и таких катушек 6 — по две на каждую из трех фаз. Обратите внимание, количество катушек в одной группе для одной пары полюсов может быть не обязательно 1, но и 2 и 3, однако для примера мы рассмотрели вариант с одиночными группами на пару катушек (не будем в рамках данной статьи заострять внимание на способах намотки). 1500 оборотов в минуту Для получения синхронной скорости в 1500 оборотов в минуту, количество полюсов статора увеличивают вдвое, чтобы за 1 колебание из 50 магнитный поток совершил бы только пол оборота — 180 градусов. Для этого на каждую фазу делают по 4 секции обмотки. Таким образом, если одна катушка занимает четверть всех пазов, то перед вами двигатель с двумя парами полюсов, образованными четырьмя катушками на фазу. Например, 6 пазов из 24 занимает одна катушка или 12 из 48, значит перед вами двигатель с синхронной частотой 1500 оборотов в минуту, или с учетом скольжения примерно 1350 оборотов в минуту. На приведенном фото каждая секция обмотки выполнена в виде двойной катушечной группы. 1000 оборотов в минуту Как вы уже поняли, для получения синхронной частоты в 1000 оборотов в минуту, каждая фаза образует уже три пары полюсов, чтобы за одно колебание из 50 (герц) магнитный поток обернулся бы всего на 120 градусов, и соответствующим образом повернул бы за собой ротор. Таким образом, минимум 18 катушек установлены на статор, причем каждая катушка занимает шестую часть всех пазов (по шесть катушек на фазу — по три пары). Например, если пазов 24, то одна катушка займет 4 из них. Получится частота с учетом скольжения около 935 оборотов в минуту. 750 оборотов в минуту Для получения синхронной скорости в 750 оборотов в минуту, необходимо, чтобы три фазы формировали на статоре четыре пары движущихся полюсов, это по 8 катушек на фазу — одна напротив другой — 8 полюсов. Если например на 48 пазов приходится по катушке на каждые 6 пазов — перед вами асинхронный двигатель с синхронными оборотами 750 (или около 730 с учетом скольжения). 500 оборотов в минуту Наконец, для получения асинхронного двигателя с синхронной скоростью в 500 оборотов в минуту необходимо 6 пар полюсов — по 12 катушек (полюсов) на фазу, чтобы на каждое колебание сети магнитный поток поворачивался бы на 60 градусов. То есть, если например статор имеет 36 пазов, при этом на катушку приходится по 4 паза — перед вами трехфазный двигатель на 500 оборотов в минуту (480 с учетом скольжения). Источник Как определить мощность, частоту вращения, начало и конец обмоток двигателя без бирки. Что делать, если вы купили или достали каким-то образом эл.двигатель, на котором отсутствует бирка или шильдик с обозначением его мощности, частоты вращения и т.п.? Либо на старом движке эти данные стерлись и стали нечитабельны. При этом паспорта или какой-то другой технической документации у вас под рукой нет. Можно ли в этом случае узнать параметры двигателя самостоятельно? Конечно же да, причем несколькими способами. Давайте рассмотрим самые популярные из них. Первоначально для точного определения мощности потребуется выяснить синхронную частоту вращения вала, а перед этим узнать, где у нас начало каждой обмотки, а где ее конец. По ГОСТ 26772-85 обмотки трехфазных асинхронных двигателей должны маркироваться буквами: По старому госту обозначение было несколько иным: Еще раньше можно было встретить надписи Н1-К1 (начало-конец обмотки №1), Н2-К2, Н3-К3. На некоторых движках для облегчения распознавания концов обмоток их выводят из разных отверстий на одну или другую сторону. Как например на фото снизу. Но не всегда можно доверять таким выводам. Поэтому проверить все вручную никогда не помешает. Если никаких обозначений и букв на барно нет, и вы не знаете, где у вас начало, а где конец обмотки, читайте инструкцию под спойлером. В помощники берете мультиметр и устанавливаете его в режим замера сопротивления. Одним щупом дотрагиваетесь до любого из шести выводов, а другим поочередно прикасаетесь к остальным пяти проводам, тем самым, ища соответствующую пару. При ее нахождении на табло мультиметра должна высветиться цифра, показывающее некое сопротивление в Омах. В остальных случаях с другими проводами сопротивление будет равняться бесконечности (обрыв). Отмечаете данную обмотку бирками и переходите к оставшимся проводам. Таким нехитрым способом буквально за одну минуту можно «вызвонить» концы всех обмоток. Однако это еще не все. Главная проблема заключается в том, что вы пока не знаете, какой из двух выводов является началом обмотки, а какой ее концом. Для того, чтобы это выяснить, соединяете между собой по два вывода от разных обмоток. То есть, условное начало V1 первой обмотки, соединяем с условным концом второй обмотки — U2. При этом у вас пока нет точной информации начало это или конец. Вы их сами так промаркировали для себя, чтобы сделать последующие замеры. На другие концы этих двух обмоток (U1 и V2) подаете переменное напряжение 220В или меньше. Зависит это от того, на какое напряжение рассчитан ваш движок. Смысл всего этого действия – замерить какое напряжение появится на концах третьей обмотки W1-W2. Это так называемый метод трансформации. Если между W1-W2 будет какое-то значение (10-15В или больше), значит первые две обмотки у вас включены согласовано, то есть правильно. Все подписанные концы V1-V2, U1-U2 вы угадали верно. Бирки на них менять не нужно. Если же напряжение между W1-W2 будет очень маленьким или его вообще не будет, то получается, что первые две обмотки вы включили по встречной схеме (неправильно). Бирки на одной из обмоток придется поменять местами. Разобравшись с двумя фазами переходим к третьей. Здесь процедура та же самая. Соединяете между собой условные начало и конец W1 и U2, а на U1 и W2 подаете 220V. Замеры делаете между выводами V1 и V2. Если угадали, то двигатель может даже запуститься на двух фазах, ну или по крайней мере между V1 и V2 будет несколько вольт. Если нет, то просто поменяйте местами бирки W1 и W2. Второй метод определения начала и конца обмоток еще более простой. Сперва находите три разные обмотки, как было указано выше. Соединяете их последовательно (условный конец первой с началом второй U2-V1, а конец второй с началом третье V2-W1). На два оставшихся вывода U1-W2 подаете напряжение 220В. После этого поочередно подносите лампочку к концам каждой из обмоток (U1-U2, V1-V2, W1-W2). Если она горит везде с одинаковой яркостью, то вы угадали со всеми выводами. Если яркость будет отличаться, это говорит о том, что данная обмотка перевернута по отношению к двум другим. На ней бирки нужно поменять местами. Вообще-то по ТБ с лампочкой в качестве контрольки уже давно запрещено работать, поэтому вместо нее лучше используйте мультиметр с функцией замера напряжения. Для определения частоты по первому способу вам потребуется обычный китайский стрелочный мультиметр (аналоговый, не электронный!). Определять частоту нужно при положении переключателя мультиметра в режиме измерения тока (100мА). Далее подключаете измерительные щупы в соответствующие разъемы: Источник Асинхронные электродвигатели, способы измерения скорости и момента Принцип работы и устройство асинхронного двигателя. Способ измерения электромагнитного момента асинхронного двигателя. Регулирование частоты вращения асинхронных двигателей. Изменение скольжения, числа пар полюсов, частоты источника питания двигателя. Рубрика Физика и энергетика Вид реферат Язык русский Дата добавления 16.05.2016 Размер файла 397,1 K Отправить свою хорошую работу в базу знаний просто. Используйте форму, расположенную ниже Студенты, аспиранты, молодые ученые, использующие базу знаний в своей учебе и работе, будут вам очень благодарны. Размещено на http://www.allbest.ru/ Областное государственное бюджетное профессиональное образовательное учреждение «Смоленский политехнический техникум» «Асинхронные электродвигатели, способы измерения скорости и момента» Выполнил: студент группы 3-09-Э Проверил: Абросов А.И Асинхронный двигатель — принцип работы и устройство Способ измерения электромагнитного момента асинхронного двигателя Регулирование частоты вращения асинхронных двигателей Изменение числа пар полюсов Изменение частоты источника питания Список используемой литературы Асинхронный двигатель — принцип работы и устройство Современные трёхфазные асинхронные двигатели являются преобразователями электрической энергии в механическую. Благодаря своей простоте, низкой стоимости и высокой надёжности асинхронные двигатели получили широкое применение. Они присутствуют повсюду, это самый распространённый тип двигателей, их выпускается 90% от общего числа двигателей в мире. Асинхронный электродвигатель поистине совершил технический переворот во всей мировой промышленности. Огромная популярность асинхронных двигателей связана с простотой их эксплуатации, дешивизной и надежностью. Асинхронный двигатель — это асинхронная машина, предназначенная для преобразования электрической энергии переменного тока в механическую энергию. Само слово “асинхронный” означает не одновременный. При этом имеется ввиду, что у асинхронных двигателей частота вращения магнитного поля статора всегда больше частоты вращения ротора. Работают асинхронные двигатели, как понятно из определения, от сети переменного тока. На рисунке: 1 — вал, 2,6 — подшипники, 3,8 — подшипниковые щиты, 4 — лапы, 5 — кожух вентилятора, 7 — крыльчатка вентилятора, 9 — короткозамкнутый ротор, 10 — статор, 11 — коробка выводов. Основными частями асинхронного двигателя являются статор (10) и ротор (9). Статор имеет цилиндрическую форму, и собирается из листов стали. В пазах сердечника статора уложены обмотки статора, которые выполнены из обмоточного провода. Оси обмоток сдвинуты в пространстве относительно друг друга на угол 120°. В зависимости от подаваемого напряжения концы обмоток соединяются треугольником или звездой. асинхронный двигатель электромагнитный полюс Роторы асинхронного двигателя бывают двух видов: короткозамкнутый и фазный ротор. Короткозамкнутый ротор представляет собой сердечник, набранный из листов стали. В пазы этого сердечника заливается расплавленный алюминий, в результате чего образуются стержни, которые замыкаются накоротко торцевыми кольцами. Эта конструкция называется «беличьей клеткой». В двигателях большой мощности вместо алюминия может применяться медь. Беличья клетка представляет собой короткозамкнутую обмотку ротора, откуда собственно название. Фазный ротор имеет трёхфазную обмотку, которая практически не отличается от обмотки статора. В большинстве случаев концы обмоток фазного ротора соединяются в звезду, а свободные концы подводятся к контактным кольцам. С помощью щёток, которые подключены к кольцам, в цепь обмотки ротора можно вводить добавочный резистор. Это нужно для того, чтобы можно было изменять активное сопротивление в цепи ротора, потому что это способствует уменьшению больших пусковых токов. Подробнее о фазном роторе можно прочитать в статье -асинхронный двигатель с фазным ротором. Принцип работы При подаче к обмотке статора напряжения, в каждой фазе создаётся магнитный поток, который изменяется с частотой подаваемого напряжения. Эти магнитные потоки сдвинуты относительно друг друга на 120°, как во времени, так и в пространстве. Результирующий магнитный поток оказывается при этом вращающимся. Результирующий магнитный поток статора вращается и тем самым создаёт в проводниках ротора ЭДС. Так как обмотка ротора, имеет замкнутую электрическую цепь, в ней возникает ток, который в свою очередь взаимодействуя с магнитным потоком статора, создаёт пусковой момент двигателя, стремящийся повернуть ротор в направлении вращения магнитного поля статора. Когда он достигает значения, тормозного момента ротора, а затем превышает его, ротор начинает вращаться. При этом возникает так называемое скольжение. Скольжение s — это величина, которая показывает, насколько синхронная частота n1 магнитного поля статора больше, чем частота вращения ротора n2, в процентном соотношении. Скольжение это крайне важная величина. В начальный момент времени она равна единице, но по мере возрастания частоты вращения n2 ротора относительная разность частот n1-n2 становится меньше, вследствие чего уменьшаются ЭДС и ток в проводниках ротора, что влечёт за собой уменьшение вращающего момента. В режиме холостого хода, когда двигатель работает без нагрузки на валу, скольжение минимально, но с увеличением статического момента, оно возрастает до величины sкр — критического скольжения. Если двигатель превысит это значение, то может произойти так называемое опрокидывание двигателя, и привести в последствии к его нестабильной работе. Значения скольжения лежит в диапазоне от 0 до 1, для асинхронных двигателей общего назначения оно составляет в номинальном режиме — 1 — 8 %. Как только наступит равновесие между электромагнитным моментом, вызывающим вращение ротора и тормозным моментом создаваемым нагрузкой на валу двигателя процессы изменения величин прекратятся. Выходит, что принцип работы асинхронного двигателя заключается во взаимодействии вращающегося магнитного поля статора и токов, которые наводятся этим магнитным полем в роторе. Причём вращающий момент может возникнуть только в том случае, если существует разность частот вращения магнитных полей. Способ измерения электромагнитного момента асинхронного двигателя Изобретение относится к электротехнике, в частности к частотно-управляемым электроприводам, и может быть использовано в качестве датчика электропривода (или способа его реализации) в системах регулирования асинхронных электроприводов с преобразователями частоты на основе автономных инверторов с широтно-импульсным регулированием напряжения. Известен способ измерения электромагнитного момента асинхронного двигателя, питаемого от преобразователя частоты на основе автономного инвертора тока, заключающийся в том, что измеряют ток на входе преобразователя частоты, измеряют напряжение на входе инвертора и измеряют на входе системы управления инвертором преобразователя частоты сигнал, пропорциональный выходной частоте инвертора, а электромагнитный момент двигателя вычисляют как результат частного от деления произведения измеренных сигналов тока и напряжения на упомянутый сигнал, пропорциональный выходной частоте инвертора. Недостатком известного способа измерения электромагнитного момента являются, во-первых, сложность, обусловленная наличием двух операций измерения высокопотенциальных электрических сигналов (тока и напряжения). Также недостатком известного способа является большая величина пульсаций выходного сигнала измеренного момента (вызванная коммутационными провалами напряжения на входе автономного инвертора тока), требующая, как правило, из условия сглаживания установки на выход устройства дополнительного фильтрующего звена, вносящего при этом запаздывание в измерение сигнала момента, неустойчивое измерение момента в области выходных низких (пусковых) частот электропривода, обусловленное необходимостью проведения множительно-делительным блоком операций умножения и деления малых сигналов (усугубляющееся влиянием указанных коммутационных провалов напряжения, присутствующих в одном из входных сигналов блока). Известен также способ измерения электромагнитного момента асинхронного двигателя, питаемого от преобразователя частоты на основе автономного инвертора с широтно-импульсным регулированием выходного напряжения, заключающийся в том, что измеряют на выходе инвертора статорные токи двух фаз двигателя, вычисляют статорный ток третьей фазы двигателя путем суммирования измеренных сигналов двух фазных токов двигателя, системой управления инвертором преобразователя частоты формируют для трех выходных фаз преобразователя частоты сигналы задания знака полуволны основной гармоники выходного фазного напряжения: +1 для положительной полуволны, -1 для отрицательной полуволны, вычисляют произведения измеренных и вычисленных значений фазных токов двигателя на соответствующей данной фазе сигнал задания знака полуволны основной гармоники фазного напряжения инвертора, при этом электромагнитный момент двигателя находят в виде суммы полученных произведений сигналов. Недостатками известного способа измерения электромагнитного момента являются сложность, обусловленная наличием двух операций измерения высокопотенциальных электрических сигналов (а именно, двух фазных токов), ограниченная область применения, а именно, электроприводами, в которых обеспечивается управление асинхронным частотно-регулируемым двигателем с постоянным магнитным потоком двигателя, так как измеряемый известным способом сигнал (активной составляющей статорного тока двигателя) пропорционален электромагнитному моменту асинхронного двигателя только при неизменном значении магнитного потока; в случае управления двигателем с изменяющимся магнитным потоком при известном способе вносится существенная ошибка в величину измеряемого электромагнитного момента (до 20-50%). Также недостатком известного способа является увеличение пульсаций измеренного момента на низкой выходной частоте электропривода, требующее дополнительной фильтрации для устойчивой работы в системе регулирования электропривода; это вносит значительное запаздывание (0,2-0,3 с), снижая быстродействие. Известен способ измерения электромагнитного момента асинхронного двигателя, подключенного к сети через преобразователь частоты на основе автономного инвертора с широтно-импульсным регулированием выходного напряжения, при котором измеряют ток, фазные напряжения с последующим вычислением электромагнитного момента через определенный интеграл от электромагнитной мощности, определяемой как произведение вычисленной путем суммирования фазных напряжений ЭДС на величину измеренного тока. Интегрирование производят в течение каждого полупериода основной гармоники фазного напряжения, при этом в начале каждого последующего периода времени результат интегрирования обнуляют. Недостатками данного способа являются сложность, обусловленная наличием большого числа операций: измерение высокопотенциальных токов и напряжений, вычисление произведений этих параметров; невысокое быстродействие из-за запаздывания, равного полупериоду выходного напряжения (время запаздывания может достигать 0,5-1 с при низких значениях частот и питании двигателя от преобразователя частоты). Регулирование частоты вращения асинхронных двигателей 1. изменением скольжения; 2. изменением числа пар полюсов; 3. изменением частоты источника питания. Изменение скольжения Этот способ используют в приводе тех механизмов, где установлены асинхронные двигатели с фазным ротором. Например, в приводе подъемно-транспортных машин. В цепь фазного ротора вводится регулировочный реостат. Увеличение активного сопротивления ротора не влияет на величину критического момента, но увеличивает критическое скольжение. Основные недостатки этого способа: 1. Из-за больших потерь на регулировочном реостате снижается коэффициент полезного действия, т.е. способ неэкономичный. 2. Механическая характеристика асинхронного двигателя с увеличением активного сопротивления ротора становится мягче, т.е. снижается устойчивость работы двигателя. 3. Невозможно плавно регулировать частоту вращения. Из-за перечисленных недостатков этот способ применяют для кратковременного снижения частоты вращения. Изменение числа пар полюсов Эти двигатели (многоскоростные) имеют более сложную обмотку статора, позволяющую изменять ее число пар полюсов, и короткозамкнутый ротор. При работе асинхронного двигателя необходимо, чтобы обмотки ротора и статора имели одинаковое число пар полюсов. Только короткозамкнутый ротор способен автоматически приобретать то же число пар полюсов, что и поле статора. Многоскоростные двигатели нашли широкое применение в приводе металлорежущих станков. Нашли применение двух, трех и четырех скоростные двигатели. На рис. показана схема соединения и магнитное поле статора двигателя при последовательном (б) и параллельном (а) соединении полуобмоток. У двухскоростного двигателя обмотка каждой фазы состоит из двух полуобмоток. Включая их последовательно или параллельно можно в 2 раза изменять число пар полюсов. Изменение частоты источника питания В качестве таких источников питания в настоящее время начали находить применение преобразователи частоты (ПЧ), выполняемые на мощных полупроводниковых приборах — тиристорах. Для сохранения неизменным магнитного потока, т.е. для сохранения перегрузочной способности двигателя, необходимо вместе с частотой изменять и действующее значение подведенного напряжения. Достоинства этого способа: плавное регулирование, возможность повышать и понижать частоту вращения, сохранение жесткости механических характеристик, экономичность. Основной недостаток — требуется преобразователь частоты, т.е. дополнительные капитальные вложения. Список используемой литературы 2. Мельников В. Ю., Бородацкий Е.Г. Косвенный контроль координат асинхронного короткозамкнутого двигателя. Деп. В Казгос ИНТИ, Алматы, 1994, вып.1, 69 с. 3. Мельников В.Ю., Умурзакова А.Д. Косвенный метод контроля крутящего момента асинхронного электродвигателя// Материалы II Международной научно-практической конференции ««Наука и образование в XXI веке: динамика развития в евразийском пространстве», Павлодар, 2011.- с.65-67. 4. Предварительный Патент РК № 18934, бюл. № 11 от 15.11.2007 Способ измерения крутящегося момента асинхронного электродвигателя/ Мельников В.Ю., Умурзакова А.Д. 5. Умурзакова А.Д. Способ измерения крутящегося момента асинхронного электродвигателя на основе косвенного метода контроля координат// Материалы Международной научно- практической конференции «Индустриально- инновационное развитие на современном этапе: состояние и перспективы», Павлодар, 2009. — с.56. Размещено на Allbest.ru Подобные документы Асинхронный двигатель: строение и разновидности. Вращающееся магнитное поле. Принцип действия асинхронного двигателя с короткозамкнутым ротором. Регулирование частоты вращения путем вращения и скольжения. Тормозные режимы работы асинхронного двигателя. презентация [352,5 K], добавлен 19.10.2014 Угловая скорость вращения магнитного поля. Математическая модель асинхронного двигателя в форме Коши, а также блок-схема его прямого пуска с использованием Power System Blockset. Зависимость угловой скорости ротора от величины электромагнитного момента. реферат [672,5 K], добавлен 03.01.2010 Паспортные данные асинхронного двигателя. Моделирование схемы в пакете SkyLab. Переходные процессы фазного тока и угловой скорости при пуске двигателя. Переходные процессы электромагнитного момента и угловой скорости. Динамическая пусковая характеристика. лабораторная работа [270,3 K], добавлен 18.06.2015 Сравнение характеристик электрических машин различных типов. Понятие постоянных и переменных потерь энергии. Способы измерения частоты вращения асинхронного двигателя. Определение критического момента и номинальной мощности электрической машины. презентация [103,7 K], добавлен 21.10.2013 Обоснованный выбор типов и вариантов асинхронного двигателя. Пусковой момент механизма, определение установившейся скорости. Расчёт номинальных параметров и рабочего режима асинхронного двигателя. Параметры асинхронного двигателя пяти исполнений. реферат [165,2 K], добавлен 20.01.2011 Устройство асинхронной машины: статор и вращающийся ротор. Механическая характеристика асинхронного двигателя, его постоянные и переменные потери. Методы регулирования частоты вращения двигателя. Работа синхронного генератора в автономном режиме. презентация [9,7 M], добавлен 06.03.2015 Основные достоинства и недостатки асинхронных (индукционных) машин, история их создания. Устройство асинхронного двигателя. Двигатели с улучшенными пусковыми свойствами. Анализ принципа подключения асинхронного двигателя через магнитный пускатель. презентация [5,1 M], добавлен 26.08.2015 Источник
- Как определить мощность, частоту вращения, начало и конец обмоток двигателя без бирки.
- Асинхронные электродвигатели, способы измерения скорости и момента
- Принцип работы и устройство асинхронного двигателя. Способ измерения электромагнитного момента асинхронного двигателя. Регулирование частоты вращения асинхронных двигателей. Изменение скольжения, числа пар полюсов, частоты источника питания двигателя.
- Отправить свою хорошую работу в базу знаний просто. Используйте форму, расположенную ниже
- Асинхронный двигатель — принцип работы и устройство
- Принцип работы
- Способ измерения электромагнитного момента асинхронного двигателя
- Изобретение относится к электротехнике, в частности к частотно-управляемым электроприводам, и может быть использовано в качестве датчика электропривода (или способа его реализации) в системах регулирования асинхронных электроприводов с преобразователями частоты на основе автономных инверторов с широтно-импульсным регулированием напряжения.
- Известен способ измерения электромагнитного момента асинхронного двигателя, питаемого от преобразователя частоты на основе автономного инвертора тока, заключающийся в том, что измеряют ток на входе преобразователя частоты, измеряют напряжение на входе инвертора и измеряют на входе системы управления инвертором преобразователя частоты сигнал, пропорциональный выходной частоте инвертора, а электромагнитный момент двигателя вычисляют как результат частного от деления произведения измеренных сигналов тока и напряжения на упомянутый сигнал, пропорциональный выходной частоте инвертора.
- Недостатком известного способа измерения электромагнитного момента являются, во-первых, сложность, обусловленная наличием двух операций измерения высокопотенциальных электрических сигналов (тока и напряжения). Также недостатком известного способа является большая величина пульсаций выходного сигнала измеренного момента (вызванная коммутационными провалами напряжения на входе автономного инвертора тока), требующая, как правило, из условия сглаживания установки на выход устройства дополнительного фильтрующего звена, вносящего при этом запаздывание в измерение сигнала момента, неустойчивое измерение момента в области выходных низких (пусковых) частот электропривода, обусловленное необходимостью проведения множительно-делительным блоком операций умножения и деления малых сигналов (усугубляющееся влиянием указанных коммутационных провалов напряжения, присутствующих в одном из входных сигналов блока).
- Известен также способ измерения электромагнитного момента асинхронного двигателя, питаемого от преобразователя частоты на основе автономного инвертора с широтно-импульсным регулированием выходного напряжения, заключающийся в том, что измеряют на выходе инвертора статорные токи двух фаз двигателя, вычисляют статорный ток третьей фазы двигателя путем суммирования измеренных сигналов двух фазных токов двигателя, системой управления инвертором преобразователя частоты формируют для трех выходных фаз преобразователя частоты сигналы задания знака полуволны основной гармоники выходного фазного напряжения: +1 для положительной полуволны, -1 для отрицательной полуволны, вычисляют произведения измеренных и вычисленных значений фазных токов двигателя на соответствующей данной фазе сигнал задания знака полуволны основной гармоники фазного напряжения инвертора, при этом электромагнитный момент двигателя находят в виде суммы полученных произведений сигналов.
- Недостатками известного способа измерения электромагнитного момента являются сложность, обусловленная наличием двух операций измерения высокопотенциальных электрических сигналов (а именно, двух фазных токов), ограниченная область применения, а именно, электроприводами, в которых обеспечивается управление асинхронным частотно-регулируемым двигателем с постоянным магнитным потоком двигателя, так как измеряемый известным способом сигнал (активной составляющей статорного тока двигателя) пропорционален электромагнитному моменту асинхронного двигателя только при неизменном значении магнитного потока; в случае управления двигателем с изменяющимся магнитным потоком при известном способе вносится существенная ошибка в величину измеряемого электромагнитного момента (до 20-50%). Также недостатком известного способа является увеличение пульсаций измеренного момента на низкой выходной частоте электропривода, требующее дополнительной фильтрации для устойчивой работы в системе регулирования электропривода; это вносит значительное запаздывание (0,2-0,3 с), снижая быстродействие.
- Известен способ измерения электромагнитного момента асинхронного двигателя, подключенного к сети через преобразователь частоты на основе автономного инвертора с широтно-импульсным регулированием выходного напряжения, при котором измеряют ток, фазные напряжения с последующим вычислением электромагнитного момента через определенный интеграл от электромагнитной мощности, определяемой как произведение вычисленной путем суммирования фазных напряжений ЭДС на величину измеренного тока. Интегрирование производят в течение каждого полупериода основной гармоники фазного напряжения, при этом в начале каждого последующего периода времени результат интегрирования обнуляют.
- Недостатками данного способа являются сложность, обусловленная наличием большого числа операций: измерение высокопотенциальных токов и напряжений, вычисление произведений этих параметров; невысокое быстродействие из-за запаздывания, равного полупериоду выходного напряжения (время запаздывания может достигать 0,5-1 с при низких значениях частот и питании двигателя от преобразователя частоты).
- Регулирование частоты вращения асинхронных двигателей
- 1. изменением скольжения;
- 2. изменением числа пар полюсов;
- 3. изменением частоты источника питания.
- Изменение скольжения
- Изменение числа пар полюсов
- Изменение частоты источника питания
- Список используемой литературы
- 2. Мельников В. Ю., Бородацкий Е.Г. Косвенный контроль координат асинхронного короткозамкнутого двигателя. Деп. В Казгос ИНТИ, Алматы, 1994, вып.1, 69 с.
- 3. Мельников В.Ю., Умурзакова А.Д. Косвенный метод контроля крутящего момента асинхронного электродвигателя// Материалы II Международной научно-практической конференции ««Наука и образование в XXI веке: динамика развития в евразийском пространстве», Павлодар, 2011.- с.65-67.
- 4. Предварительный Патент РК № 18934, бюл. № 11 от 15.11.2007 Способ измерения крутящегося момента асинхронного электродвигателя/ Мельников В.Ю., Умурзакова А.Д.
- 5. Умурзакова А.Д. Способ измерения крутящегося момента асинхронного электродвигателя на основе косвенного метода контроля координат// Материалы Международной научно- практической конференции «Индустриально- инновационное развитие на современном этапе: состояние и перспективы», Павлодар, 2009. — с.56.
- Размещено на Allbest.ru
- Подобные документы
Как определить скорость вращения электродвигателя
Под скоростью вращения асинхронного электродвигателя обычно понимают угловую частоту вращения его ротора, которая приведена на шильдике (на паспортной табличке двигателя) в виде количества оборотов в минуту. Трехфазный двигатель можно питать и от однофазной сети, для этого достаточно добавить конденсатор параллельно одной или двум его обмоткам, в зависимости от напряжения сети, но конструкция двигателя от этого не изменится.

Так, если ротор под нагрузкой совершает 2760 оборотов в минуту, то угловая частота данного двигателя будет равна 2760*2пи/60 радиан в секунду, то есть 289 рад/с, что не удобно для восприятия, поэтому на табличке пишут просто «2760 об/мин». Применительно к асинхронному электродвигателю, это обороты с учетом скольжения s.
Синхронная же скорость данного двигателя (без учета скольжения) будет равна 3000 оборотов в минуту, поскольку при питании обмоток статора сетевым током с частотой 50 Гц, каждую секунду магнитный поток будет совершать по 50 полных циклических изменений, а 50*60 = 3000, вот и получается 3000 оборотов в минуту — синхронная скорость асинхронного электродвигателя.
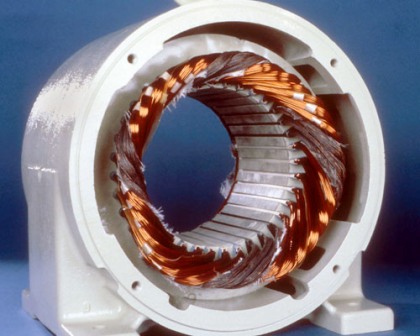
В рамках данной статьи мы поговорим о том, как определить синхронную скорость вращения неизвестного асинхронного трехфазного двигателя, просто взглянув на его статор. По внешнему виду статора, по расположению обмоток, по количеству пазов, — можно легко определить синхронные обороты электродвигателя если у вас нет под рукой тахометра. Итак, начнем по порядку и разберем данный вопрос с примерами.
3000 оборотов в минуту
Про асинхронные электродвигатели (смотрите — Виды электродвигателей) принято говорить, что тот или иной двигатель имеет одну, две, три или четыре пары полюсов. Минимум — одна пара полюсов, то есть минимум — два полюса. Взгляните на рисунок. Здесь вы видите, что в статор уложено по две последовательно соединенные катушки на каждую фазу — в каждой паре катушек одна расположена напротив другой. Эти катушки и образуют по паре полюсов на статоре.
Одна из фаз показана для ясности красным цветом, вторая — зеленым, третья — черным. Обмотки всех трех фаз устроены одинаково. Поскольку три эти обмотки питаются по очереди (ток трехфазный), то за 1 колебание из 50 в каждой из фаз — магнитный поток статора один раз обернется на полные 360 градусов, то есть совершит один оборот за 1/50 секунды, значит 50 оборотов получится за секунду. Так и выходит 3000 оборотов в минуту.
Таким образом становится ясно, что для определения синхронных оборотов асинхронного электродвигателя достаточно определить количество пар его полюсов, что легко сделать, сняв крышку и взглянув на статор.
Общее число пазов статора разделите на число пазов, приходящихся на одну секцию обмотки одной из фаз. Если получится 2, то перед вами двигатель с двумя полюсами — с одной парой полюсов. Следовательно синхронная частота составляет 3000 оборотов в минуту или примерно 2910 с учетом скольжения. В простейшем случае 12 пазов, по 6 пазов на катушку, и таких катушек 6 — по две на каждую из трех фаз.
Обратите внимание, количество катушек в одной группе для одной пары полюсов может быть не обязательно 1, но и 2 и 3, однако для примера мы рассмотрели вариант с одиночными группами на пару катушек (не будем в рамках данной статьи заострять внимание на способах намотки).
1500 оборотов в минуту

Для получения синхронной скорости в 1500 оборотов в минуту, количество полюсов статора увеличивают вдвое, чтобы за 1 колебание из 50 магнитный поток совершил бы только пол оборота — 180 градусов.
Для этого на каждую фазу делают по 4 секции обмотки. Таким образом, если одна катушка занимает четверть всех пазов, то перед вами двигатель с двумя парами полюсов, образованными четырьмя катушками на фазу.
Например, 6 пазов из 24 занимает одна катушка или 12 из 48, значит перед вами двигатель с синхронной частотой 1500 оборотов в минуту, или с учетом скольжения примерно 1350 оборотов в минуту. На приведенном фото каждая секция обмотки выполнена в виде двойной катушечной группы.
1000 оборотов в минуту
Как вы уже поняли, для получения синхронной частоты в 1000 оборотов в минуту, каждая фаза образует уже три пары полюсов, чтобы за одно колебание из 50 (герц) магнитный поток обернулся бы всего на 120 градусов, и соответствующим образом повернул бы за собой ротор.
Таким образом, минимум 18 катушек установлены на статор, причем каждая катушка занимает шестую часть всех пазов (по шесть катушек на фазу — по три пары). Например, если пазов 24, то одна катушка займет 4 из них. Получится частота с учетом скольжения около 935 оборотов в минуту.
750 оборотов в минуту
Для получения синхронной скорости в 750 оборотов в минуту, необходимо, чтобы три фазы формировали на статоре четыре пары движущихся полюсов, это по 8 катушек на фазу — одна напротив другой — 8 полюсов. Если например на 48 пазов приходится по катушке на каждые 6 пазов — перед вами асинхронный двигатель с синхронными оборотами 750 (или около 730 с учетом скольжения).
500 оборотов в минуту
Наконец, для получения асинхронного двигателя с синхронной скоростью в 500 оборотов в минуту необходимо 6 пар полюсов — по 12 катушек (полюсов) на фазу, чтобы на каждое колебание сети магнитный поток поворачивался бы на 60 градусов. То есть, если например статор имеет 36 пазов, при этом на катушку приходится по 4 паза — перед вами трехфазный двигатель на 500 оборотов в минуту (480 с учетом скольжения).
Источник
Как определить мощность, частоту вращения, начало и конец обмоток двигателя без бирки.
 Что делать, если вы купили или достали каким-то образом эл.двигатель, на котором отсутствует бирка или шильдик с обозначением его мощности, частоты вращения и т.п.?
Что делать, если вы купили или достали каким-то образом эл.двигатель, на котором отсутствует бирка или шильдик с обозначением его мощности, частоты вращения и т.п.?
Либо на старом движке эти данные стерлись и стали нечитабельны.
При этом паспорта или какой-то другой технической документации у вас под рукой нет. Можно ли в этом случае узнать параметры двигателя самостоятельно?
Конечно же да, причем несколькими способами. Давайте рассмотрим самые популярные из них.
Первоначально для точного определения мощности потребуется выяснить синхронную частоту вращения вала, а перед этим узнать, где у нас начало каждой обмотки, а где ее конец.
По ГОСТ 26772-85 обмотки трехфазных асинхронных двигателей должны маркироваться буквами: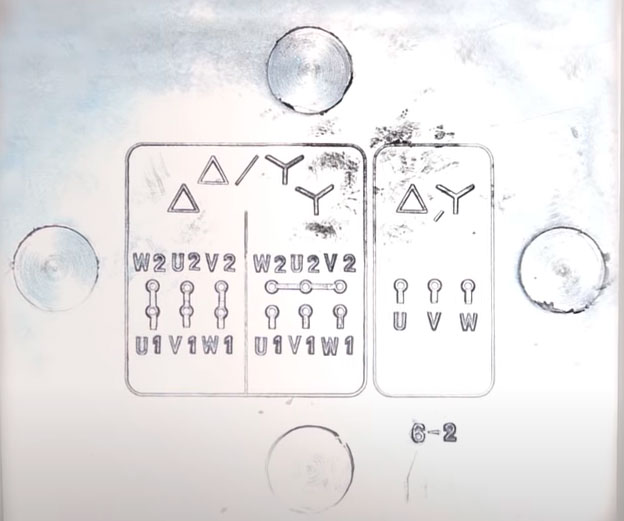
По старому госту обозначение было несколько иным:

Еще раньше можно было встретить надписи Н1-К1 (начало-конец обмотки №1), Н2-К2, Н3-К3.
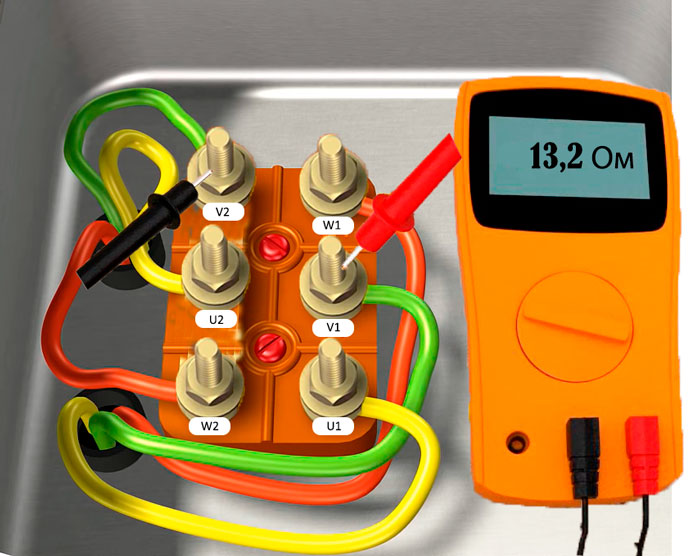
На некоторых движках для облегчения распознавания концов обмоток их выводят из разных отверстий на одну или другую сторону. Как например на фото снизу.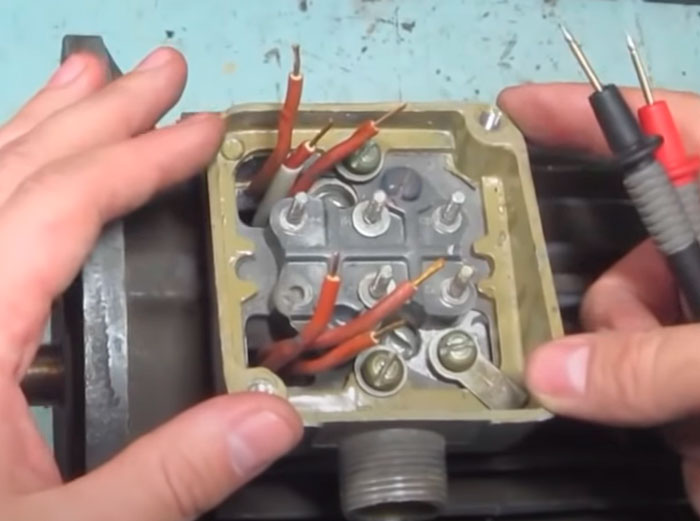
Но не всегда можно доверять таким выводам. Поэтому проверить все вручную никогда не помешает.
Если никаких обозначений и букв на барно нет, и вы не знаете, где у вас начало, а где конец обмотки, читайте инструкцию под спойлером.
В помощники берете мультиметр и устанавливаете его в режим замера сопротивления.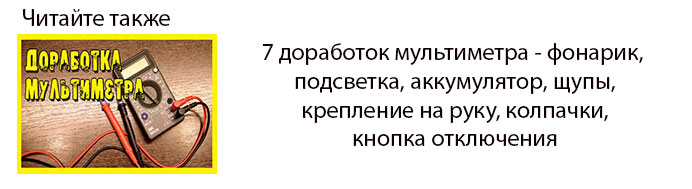
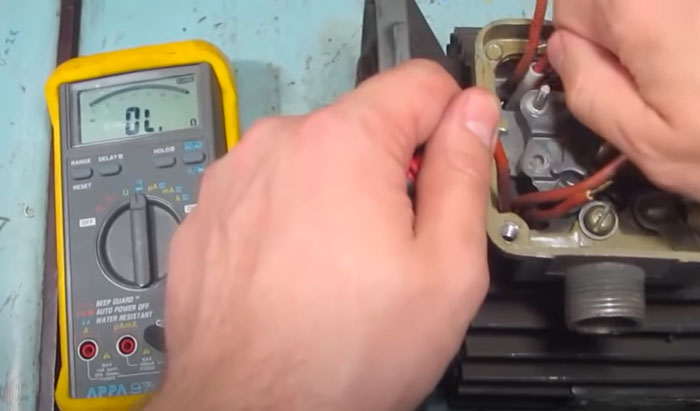
Одним щупом дотрагиваетесь до любого из шести выводов, а другим поочередно прикасаетесь к остальным пяти проводам, тем самым, ища соответствующую пару.
При ее нахождении на табло мультиметра должна высветиться цифра, показывающее некое сопротивление в Омах.

В остальных случаях с другими проводами сопротивление будет равняться бесконечности (обрыв).
Отмечаете данную обмотку бирками и переходите к оставшимся проводам. Таким нехитрым способом буквально за одну минуту можно «вызвонить» концы всех обмоток.
Однако это еще не все. Главная проблема заключается в том, что вы пока не знаете, какой из двух выводов является началом обмотки, а какой ее концом.
Для того, чтобы это выяснить, соединяете между собой по два вывода от разных обмоток. То есть, условное начало V1 первой обмотки, соединяем с условным концом второй обмотки — U2.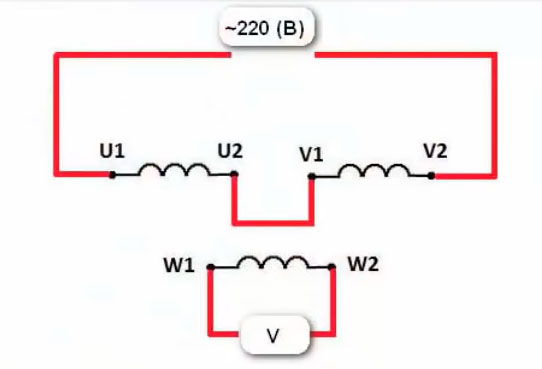
При этом у вас пока нет точной информации начало это или конец. Вы их сами так промаркировали для себя, чтобы сделать последующие замеры.
На другие концы этих двух обмоток (U1 и V2) подаете переменное напряжение 220В или меньше. Зависит это от того, на какое напряжение рассчитан ваш движок.
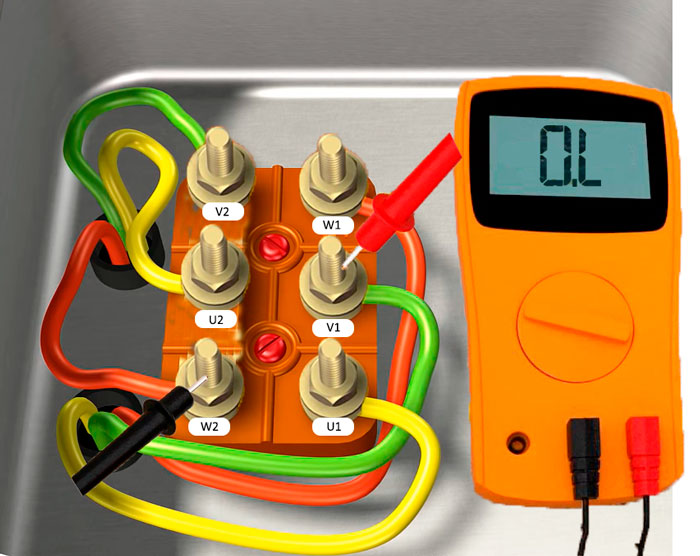
Смысл всего этого действия – замерить какое напряжение появится на концах третьей обмотки W1-W2. Это так называемый метод трансформации.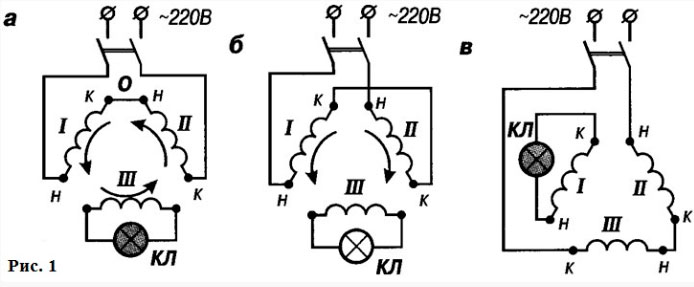
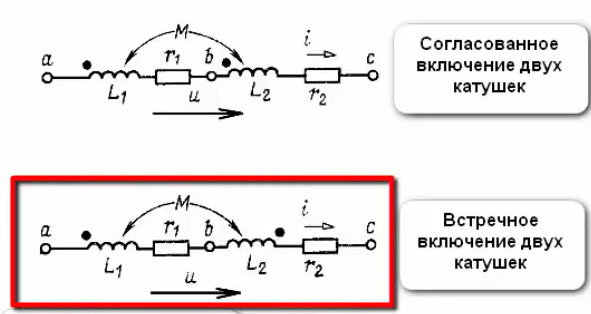
Если между W1-W2 будет какое-то значение (10-15В или больше), значит первые две обмотки у вас включены согласовано, то есть правильно. Все подписанные концы V1-V2, U1-U2 вы угадали верно.
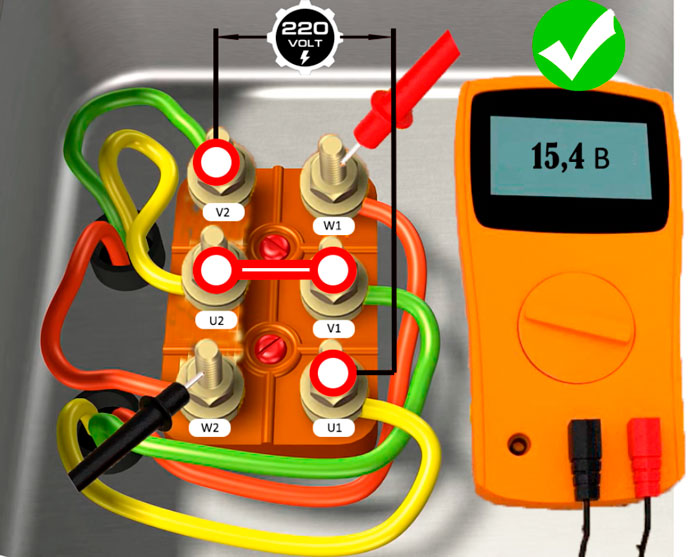
Бирки на них менять не нужно.
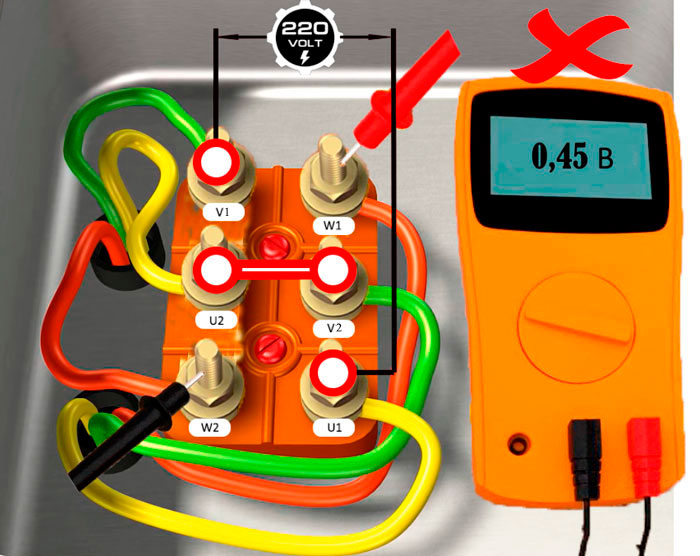
Если же напряжение между W1-W2 будет очень маленьким или его вообще не будет, то получается, что первые две обмотки вы включили по встречной схеме (неправильно). Бирки на одной из обмоток придется поменять местами.
Разобравшись с двумя фазами переходим к третьей. Здесь процедура та же самая. Соединяете между собой условные начало и конец W1 и U2, а на U1 и W2 подаете 220V.
Замеры делаете между выводами V1 и V2. Если угадали, то двигатель может даже запуститься на двух фазах, ну или по крайней мере между V1 и V2 будет несколько вольт.

Если нет, то просто поменяйте местами бирки W1 и W2.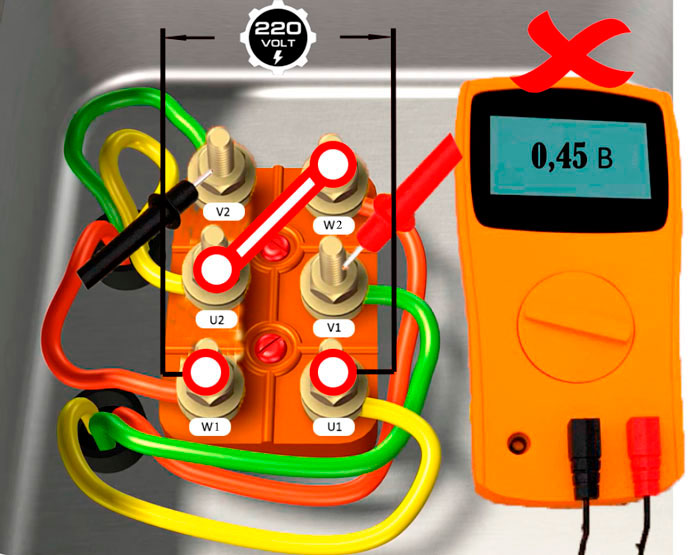
Второй метод определения начала и конца обмоток еще более простой.
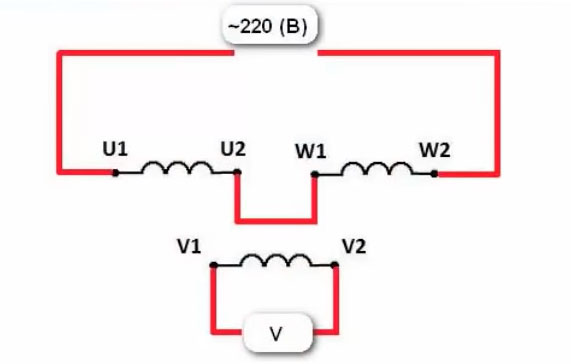
Сперва находите три разные обмотки, как было указано выше. Соединяете их последовательно (условный конец первой с началом второй U2-V1, а конец второй с началом третье V2-W1).
На два оставшихся вывода U1-W2 подаете напряжение 220В. После этого поочередно подносите лампочку к концам каждой из обмоток (U1-U2, V1-V2, W1-W2).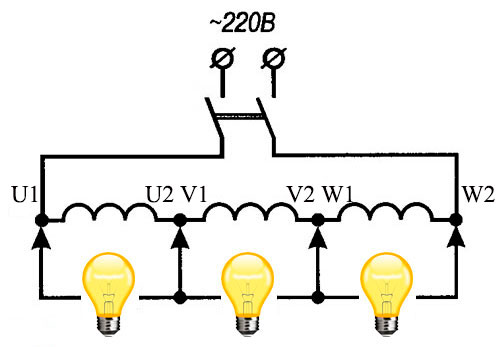
Если она горит везде с одинаковой яркостью, то вы угадали со всеми выводами.
Если яркость будет отличаться, это говорит о том, что данная обмотка перевернута по отношению к двум другим.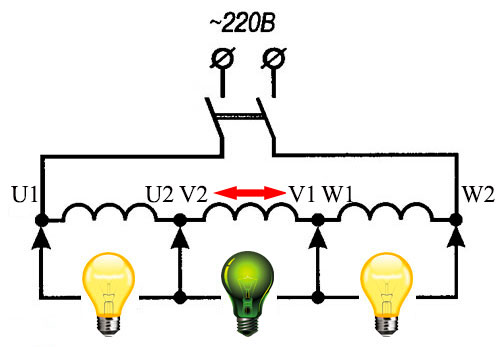
На ней бирки нужно поменять местами. Вообще-то по ТБ с лампочкой в качестве контрольки уже давно запрещено работать, поэтому вместо нее лучше используйте мультиметр с функцией замера напряжения.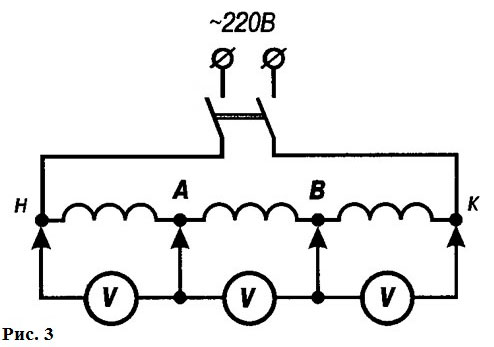
Для определения частоты по первому способу вам потребуется обычный китайский стрелочный мультиметр (аналоговый, не электронный!).
Определять частоту нужно при положении переключателя мультиметра в режиме измерения тока (100мА). Далее подключаете измерительные щупы в соответствующие разъемы:
Источник
Асинхронные электродвигатели, способы измерения скорости и момента
Принцип работы и устройство асинхронного двигателя. Способ измерения электромагнитного момента асинхронного двигателя. Регулирование частоты вращения асинхронных двигателей. Изменение скольжения, числа пар полюсов, частоты источника питания двигателя.
| Рубрика | Физика и энергетика |
| Вид | реферат |
| Язык | русский |
| Дата добавления | 16.05.2016 |
| Размер файла | 397,1 K |

Отправить свою хорошую работу в базу знаний просто. Используйте форму, расположенную ниже
Студенты, аспиранты, молодые ученые, использующие базу знаний в своей учебе и работе, будут вам очень благодарны.
Размещено на http://www.allbest.ru/
Областное государственное бюджетное профессиональное образовательное учреждение
«Смоленский политехнический техникум»
«Асинхронные электродвигатели, способы измерения скорости и момента»
Выполнил: студент группы 3-09-Э
Проверил: Абросов А.И
Асинхронный двигатель — принцип работы и устройство
Способ измерения электромагнитного момента асинхронного двигателя
Регулирование частоты вращения асинхронных двигателей
Изменение числа пар полюсов
Изменение частоты источника питания
Список используемой литературы
Асинхронный двигатель — принцип работы и устройство
Современные трёхфазные асинхронные двигатели являются преобразователями электрической энергии в механическую. Благодаря своей простоте, низкой стоимости и высокой надёжности асинхронные двигатели получили широкое применение. Они присутствуют повсюду, это самый распространённый тип двигателей, их выпускается 90% от общего числа двигателей в мире. Асинхронный электродвигатель поистине совершил технический переворот во всей мировой промышленности.
Огромная популярность асинхронных двигателей связана с простотой их эксплуатации, дешивизной и надежностью.
Асинхронный двигатель — это асинхронная машина, предназначенная для преобразования электрической энергии переменного тока в механическую энергию. Само слово “асинхронный” означает не одновременный. При этом имеется ввиду, что у асинхронных двигателей частота вращения магнитного поля статора всегда больше частоты вращения ротора. Работают асинхронные двигатели, как понятно из определения, от сети переменного тока.
На рисунке: 1 — вал, 2,6 — подшипники, 3,8 — подшипниковые щиты, 4 — лапы, 5 — кожух вентилятора, 7 — крыльчатка вентилятора, 9 — короткозамкнутый ротор, 10 — статор, 11 — коробка выводов.
Основными частями асинхронного двигателя являются статор (10) и ротор (9).
Статор имеет цилиндрическую форму, и собирается из листов стали. В пазах сердечника статора уложены обмотки статора, которые выполнены из обмоточного провода. Оси обмоток сдвинуты в пространстве относительно друг друга на угол 120°. В зависимости от подаваемого напряжения концы обмоток соединяются треугольником или звездой.
асинхронный двигатель электромагнитный полюс
Роторы асинхронного двигателя бывают двух видов: короткозамкнутый и фазный ротор.
Короткозамкнутый ротор представляет собой сердечник, набранный из листов стали. В пазы этого сердечника заливается расплавленный алюминий, в результате чего образуются стержни, которые замыкаются накоротко торцевыми кольцами. Эта конструкция называется «беличьей клеткой». В двигателях большой мощности вместо алюминия может применяться медь. Беличья клетка представляет собой короткозамкнутую обмотку ротора, откуда собственно название.
Фазный ротор имеет трёхфазную обмотку, которая практически не отличается от обмотки статора. В большинстве случаев концы обмоток фазного ротора соединяются в звезду, а свободные концы подводятся к контактным кольцам. С помощью щёток, которые подключены к кольцам, в цепь обмотки ротора можно вводить добавочный резистор. Это нужно для того, чтобы можно было изменять активное сопротивление в цепи ротора, потому что это способствует уменьшению больших пусковых токов. Подробнее о фазном роторе можно прочитать в статье -асинхронный двигатель с фазным ротором.
Принцип работы
При подаче к обмотке статора напряжения, в каждой фазе создаётся магнитный поток, который изменяется с частотой подаваемого напряжения. Эти магнитные потоки сдвинуты относительно друг друга на 120°, как во времени, так и в пространстве. Результирующий магнитный поток оказывается при этом вращающимся.
Результирующий магнитный поток статора вращается и тем самым создаёт в проводниках ротора ЭДС. Так как обмотка ротора, имеет замкнутую электрическую цепь, в ней возникает ток, который в свою очередь взаимодействуя с магнитным потоком статора, создаёт пусковой момент двигателя, стремящийся повернуть ротор в направлении вращения магнитного поля статора. Когда он достигает значения, тормозного момента ротора, а затем превышает его, ротор начинает вращаться. При этом возникает так называемое скольжение.
Скольжение s — это величина, которая показывает, насколько синхронная частота n1 магнитного поля статора больше, чем частота вращения ротора n2, в процентном соотношении.
Скольжение это крайне важная величина. В начальный момент времени она равна единице, но по мере возрастания частоты вращения n2 ротора относительная разность частот n1-n2 становится меньше, вследствие чего уменьшаются ЭДС и ток в проводниках ротора, что влечёт за собой уменьшение вращающего момента. В режиме холостого хода, когда двигатель работает без нагрузки на валу, скольжение минимально, но с увеличением статического момента, оно возрастает до величины sкр — критического скольжения. Если двигатель превысит это значение, то может произойти так называемое опрокидывание двигателя, и привести в последствии к его нестабильной работе. Значения скольжения лежит в диапазоне от 0 до 1, для асинхронных двигателей общего назначения оно составляет в номинальном режиме — 1 — 8 %.
Как только наступит равновесие между электромагнитным моментом, вызывающим вращение ротора и тормозным моментом создаваемым нагрузкой на валу двигателя процессы изменения величин прекратятся.
Выходит, что принцип работы асинхронного двигателя заключается во взаимодействии вращающегося магнитного поля статора и токов, которые наводятся этим магнитным полем в роторе. Причём вращающий момент может возникнуть только в том случае, если существует разность частот вращения магнитных полей.
Способ измерения электромагнитного момента асинхронного двигателя
Изобретение относится к электротехнике, в частности к частотно-управляемым электроприводам, и может быть использовано в качестве датчика электропривода (или способа его реализации) в системах регулирования асинхронных электроприводов с преобразователями частоты на основе автономных инверторов с широтно-импульсным регулированием напряжения.
Известен способ измерения электромагнитного момента асинхронного двигателя, питаемого от преобразователя частоты на основе автономного инвертора тока, заключающийся в том, что измеряют ток на входе преобразователя частоты, измеряют напряжение на входе инвертора и измеряют на входе системы управления инвертором преобразователя частоты сигнал, пропорциональный выходной частоте инвертора, а электромагнитный момент двигателя вычисляют как результат частного от деления произведения измеренных сигналов тока и напряжения на упомянутый сигнал, пропорциональный выходной частоте инвертора.
Недостатком известного способа измерения электромагнитного момента являются, во-первых, сложность, обусловленная наличием двух операций измерения высокопотенциальных электрических сигналов (тока и напряжения). Также недостатком известного способа является большая величина пульсаций выходного сигнала измеренного момента (вызванная коммутационными провалами напряжения на входе автономного инвертора тока), требующая, как правило, из условия сглаживания установки на выход устройства дополнительного фильтрующего звена, вносящего при этом запаздывание в измерение сигнала момента, неустойчивое измерение момента в области выходных низких (пусковых) частот электропривода, обусловленное необходимостью проведения множительно-делительным блоком операций умножения и деления малых сигналов (усугубляющееся влиянием указанных коммутационных провалов напряжения, присутствующих в одном из входных сигналов блока).
Известен также способ измерения электромагнитного момента асинхронного двигателя, питаемого от преобразователя частоты на основе автономного инвертора с широтно-импульсным регулированием выходного напряжения, заключающийся в том, что измеряют на выходе инвертора статорные токи двух фаз двигателя, вычисляют статорный ток третьей фазы двигателя путем суммирования измеренных сигналов двух фазных токов двигателя, системой управления инвертором преобразователя частоты формируют для трех выходных фаз преобразователя частоты сигналы задания знака полуволны основной гармоники выходного фазного напряжения: +1 для положительной полуволны, -1 для отрицательной полуволны, вычисляют произведения измеренных и вычисленных значений фазных токов двигателя на соответствующей данной фазе сигнал задания знака полуволны основной гармоники фазного напряжения инвертора, при этом электромагнитный момент двигателя находят в виде суммы полученных произведений сигналов.
Недостатками известного способа измерения электромагнитного момента являются сложность, обусловленная наличием двух операций измерения высокопотенциальных электрических сигналов (а именно, двух фазных токов), ограниченная область применения, а именно, электроприводами, в которых обеспечивается управление асинхронным частотно-регулируемым двигателем с постоянным магнитным потоком двигателя, так как измеряемый известным способом сигнал (активной составляющей статорного тока двигателя) пропорционален электромагнитному моменту асинхронного двигателя только при неизменном значении магнитного потока; в случае управления двигателем с изменяющимся магнитным потоком при известном способе вносится существенная ошибка в величину измеряемого электромагнитного момента (до 20-50%). Также недостатком известного способа является увеличение пульсаций измеренного момента на низкой выходной частоте электропривода, требующее дополнительной фильтрации для устойчивой работы в системе регулирования электропривода; это вносит значительное запаздывание (0,2-0,3 с), снижая быстродействие.
Известен способ измерения электромагнитного момента асинхронного двигателя, подключенного к сети через преобразователь частоты на основе автономного инвертора с широтно-импульсным регулированием выходного напряжения, при котором измеряют ток, фазные напряжения с последующим вычислением электромагнитного момента через определенный интеграл от электромагнитной мощности, определяемой как произведение вычисленной путем суммирования фазных напряжений ЭДС на величину измеренного тока. Интегрирование производят в течение каждого полупериода основной гармоники фазного напряжения, при этом в начале каждого последующего периода времени результат интегрирования обнуляют.
Недостатками данного способа являются сложность, обусловленная наличием большого числа операций: измерение высокопотенциальных токов и напряжений, вычисление произведений этих параметров; невысокое быстродействие из-за запаздывания, равного полупериоду выходного напряжения (время запаздывания может достигать 0,5-1 с при низких значениях частот и питании двигателя от преобразователя частоты).
Регулирование частоты вращения асинхронных двигателей
1. изменением скольжения;
2. изменением числа пар полюсов;
3. изменением частоты источника питания.
Изменение скольжения
Этот способ используют в приводе тех механизмов, где установлены асинхронные двигатели с фазным ротором. Например, в приводе подъемно-транспортных машин. В цепь фазного ротора вводится регулировочный реостат. Увеличение активного сопротивления ротора не влияет на величину критического момента, но увеличивает критическое скольжение.
Основные недостатки этого способа:
1. Из-за больших потерь на регулировочном реостате снижается коэффициент полезного действия, т.е. способ неэкономичный.
2. Механическая характеристика асинхронного двигателя с увеличением активного сопротивления ротора становится мягче, т.е. снижается устойчивость работы двигателя.
3. Невозможно плавно регулировать частоту вращения.
Из-за перечисленных недостатков этот способ применяют для кратковременного снижения частоты вращения.
Изменение числа пар полюсов
Эти двигатели (многоскоростные) имеют более сложную обмотку статора, позволяющую изменять ее число пар полюсов, и короткозамкнутый ротор. При работе асинхронного двигателя необходимо, чтобы обмотки ротора и статора имели одинаковое число пар полюсов. Только короткозамкнутый ротор способен автоматически приобретать то же число пар полюсов, что и поле статора. Многоскоростные двигатели нашли широкое применение в приводе металлорежущих станков. Нашли применение двух, трех и четырех скоростные двигатели.
На рис. показана схема соединения и магнитное поле статора двигателя при последовательном (б) и параллельном (а) соединении полуобмоток.
У двухскоростного двигателя обмотка каждой фазы состоит из двух полуобмоток. Включая их последовательно или параллельно можно в 2 раза изменять число пар полюсов.
Изменение частоты источника питания
В качестве таких источников питания в настоящее время начали находить применение преобразователи частоты (ПЧ), выполняемые на мощных полупроводниковых приборах — тиристорах. Для сохранения неизменным магнитного потока, т.е. для сохранения перегрузочной способности двигателя, необходимо вместе с частотой изменять и действующее значение подведенного напряжения.
Достоинства этого способа: плавное регулирование, возможность повышать и понижать частоту вращения, сохранение жесткости механических характеристик, экономичность. Основной недостаток — требуется преобразователь частоты, т.е. дополнительные капитальные вложения.
Список используемой литературы
2. Мельников В. Ю., Бородацкий Е.Г. Косвенный контроль координат асинхронного короткозамкнутого двигателя. Деп. В Казгос ИНТИ, Алматы, 1994, вып.1, 69 с.
3. Мельников В.Ю., Умурзакова А.Д. Косвенный метод контроля крутящего момента асинхронного электродвигателя// Материалы II Международной научно-практической конференции ««Наука и образование в XXI веке: динамика развития в евразийском пространстве», Павлодар, 2011.- с.65-67.
4. Предварительный Патент РК № 18934, бюл. № 11 от 15.11.2007 Способ измерения крутящегося момента асинхронного электродвигателя/ Мельников В.Ю., Умурзакова А.Д.
5. Умурзакова А.Д. Способ измерения крутящегося момента асинхронного электродвигателя на основе косвенного метода контроля координат// Материалы Международной научно- практической конференции «Индустриально- инновационное развитие на современном этапе: состояние и перспективы», Павлодар, 2009. — с.56.
Размещено на Allbest.ru
Подобные документы
Асинхронный двигатель: строение и разновидности. Вращающееся магнитное поле. Принцип действия асинхронного двигателя с короткозамкнутым ротором. Регулирование частоты вращения путем вращения и скольжения. Тормозные режимы работы асинхронного двигателя.
презентация [352,5 K], добавлен 19.10.2014
Угловая скорость вращения магнитного поля. Математическая модель асинхронного двигателя в форме Коши, а также блок-схема его прямого пуска с использованием Power System Blockset. Зависимость угловой скорости ротора от величины электромагнитного момента.
реферат [672,5 K], добавлен 03.01.2010
Паспортные данные асинхронного двигателя. Моделирование схемы в пакете SkyLab. Переходные процессы фазного тока и угловой скорости при пуске двигателя. Переходные процессы электромагнитного момента и угловой скорости. Динамическая пусковая характеристика.
лабораторная работа [270,3 K], добавлен 18.06.2015
Сравнение характеристик электрических машин различных типов. Понятие постоянных и переменных потерь энергии. Способы измерения частоты вращения асинхронного двигателя. Определение критического момента и номинальной мощности электрической машины.
презентация [103,7 K], добавлен 21.10.2013
Обоснованный выбор типов и вариантов асинхронного двигателя. Пусковой момент механизма, определение установившейся скорости. Расчёт номинальных параметров и рабочего режима асинхронного двигателя. Параметры асинхронного двигателя пяти исполнений.
реферат [165,2 K], добавлен 20.01.2011
Устройство асинхронной машины: статор и вращающийся ротор. Механическая характеристика асинхронного двигателя, его постоянные и переменные потери. Методы регулирования частоты вращения двигателя. Работа синхронного генератора в автономном режиме.
презентация [9,7 M], добавлен 06.03.2015
Основные достоинства и недостатки асинхронных (индукционных) машин, история их создания. Устройство асинхронного двигателя. Двигатели с улучшенными пусковыми свойствами. Анализ принципа подключения асинхронного двигателя через магнитный пускатель.
презентация [5,1 M], добавлен 26.08.2015
Источник



