
Учебники
Журнал «Квант»
Общие
Графическое представление гармонических колебаний. Векторные диаграммы
Наиболее часто употребляются три способа графического представления колебаний.
1. Задание графика колебаний х = f(t) в прямоугольной системе координат. По оси абсцисс откладывается время t, а по оси ординат — значение изменяющейся величины х (смещения, скорости, ускорения и др.). Для гармонических колебаний этот график — косинусоида (см. рис. 13.3) или синусоида.

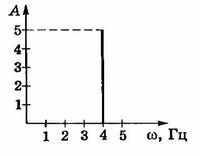
2. Спектральный способ. По оси ординат откладывается амплитуда, а по оси абсцисс — частота гармонических колебаний. Так, например колебательный процес \(x = 5 \cos 4t\) (м) будет представлен в этом случае вертикальным отрезком прямой длиной 5 м, проведенным от точки с координатой \(\omega\) = 4 Гц на оси абсцисс (рис. 13.4). Этот способ не дает никакой информации о фазе колебания.
3. Способ векторных диаграмм. Пусть величина х изменяется со временем по закону \(x = A \cos(\omega t + \varphi_0).\)
На плоскости выбирают произвольно направленную координатную ось Ох. Из начала координат под углом \(\varphi_0,\) равным начальной фазе колебаний, проводят вектор \(\vec A\), модуль которого равен амплитуде гармонического колебания A (рис. 13.5). Если вектор \(\vec A\) вращается вокруг точки О с постоянной угловой скоростью \(
\omega\) против часовой стрелки, то угол \(\varphi\) между вращающимся вектором и осью Ох в любой момент времени определится выражением \(\varphi = (\omega t + \varphi_0).\) Проекция конца вектора \(\vec A\) будет перемещаться по оси Ох и принимать значения от —А до +А, а колеблющаяся величина будет изменяться со временем по закону \(x = A \cos (\omega t + \varphi_0).\)
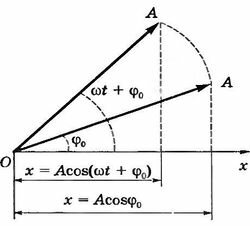
Таким образом, гармоническое колебание можно представить проекцией на некоторую произвольно выбранную ось вектора амплитуды \(\vec A\), отложенного от произвольной точки оси под углом \(\varphi_0\), равным начальной фазе, и вращающегося с угловой скоростью \(
\omega\) вокруг этой точки.
Литература
Аксенович Л. А. Физика в средней школе: Теория. Задания. Тесты: Учеб. пособие для учреждений, обеспечивающих получение общ. сред, образования / Л. А. Аксенович, Н.Н.Ракина, К. С. Фарино; Под ред. К. С. Фарино. — Мн.: Адукацыя i выхаванне, 2004. — С. 370-371.
Источник
Методы представления колебаний
Существуют различные методы описания гармонических колебаний. Приведём некоторые из них.
1. Аналитический метод
Задаётся уравнение колебаний гармонического осциллятора
по которому и определяется смещение его от положения равновесия в любой момент времени.
2. Графический метод
| Рис.5.3 |
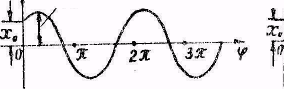
Строятся график гармонического колебания (рис.5.3) х=Аsin(ωt+φ0). По оси абсцисс (ОХ) откладывается время t или фаза колебаний ωt+φ0, по оси ординат (ОУ) – смещение х от положения равновесия.
3. Метод векторной диаграммы
| Рис.5.4 |
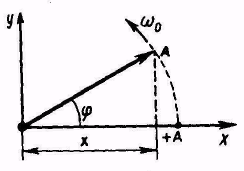
Этот метод состоит в следующем. Гармоническое колебание может быть задано с помощью вектора, длина которого равна амплитуде А колебания, а направление образует с осью х угол, равный начальной фазе колебания (рис. 5.4). Если привести этот вектор во вращение с угловой скоростью ω0, то проекция конца вектора на ось х будет перемещаться в пределах от +А до -А, а колеблющаяся величина будет изменяться со временем по закону
x = Asin(ω0t+φ0), совершая гармоническое колебание.
§ 5.2.2 Скорость и ускорение колеблющейся точки
Чтобы найти скорость материальной точки при гармоническом колебании, возьмем производную от смещения колеблющейся точки x = Asin(ω0t+φ0) по времени:
 (5.4)
(5.4)
где υmax = Аω0 — максимальная скорость (амплитуда скорости).
На основании тригонометрических формул преобразуем (4.18):
 (5.5)
(5.5)
Сравнивая выражения для смещения и скорости замечаем, что фаза скорости на  больше фазы смещения, т.е. скорость опережает по фазе смещение на
больше фазы смещения, т.е. скорость опережает по фазе смещение на  Продифференцировав (5.4), найдем ускорение:
Продифференцировав (5.4), найдем ускорение:
 (5.6)
(5.6)
где аmax = А ω0 2 — максимальное ускорение (амплитуда ускорения).
Вместо (5.5) запишем
Из сравнения (5.6) и (5.3) следует, что фазы ускорения и смещения различаются на π, т. е. эти величины изменяются в противофазе. Это значит, что при положительном максимальном смещении ускорение максимально, но отрицательно. На рисунке показаны графические зависимости смещения, скорости и ускорения от времени (рис.6.6, а) и их векторные диаграммы (рис.5.6, б) .
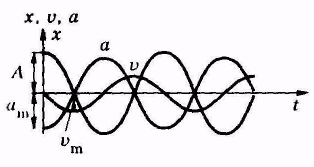
| Рис.5.6 |
| б ) |
| а ) |
§ 5.2.3 Кинетическая и потенциальная энергии колебательного движения
Колеблющееся тело обладает как кинетической, так и потенциальной энергией, которые последовательно переходят друг в друга при колебаниях осциллятора. Полная энергия осциллятора равна сумме кинетической и потенциальной энергии:
Кинетическая энергия тела, колеблющегося по гармоническому закону, вычисляют по формуле:
 (5.9)
(5.9)
с учётом mω 2 = k
Потенциальную энергию колебательного движения найдём, исходя из формулы для потенциальной энергии упругой деформации:
 (5.10)
(5.10)
Складывая кинетическую и потенциальную энергию, получим полную механическую энергию материальной точки, колеблющейся по гармоническому закону:
 (5.11)
(5.11)
Полученное выражение показывает, что энергия колеблющегося тела от времени не зависит, т.е. с течением времени остаётся величиной постоянной, а зависит только от квадрата амплитуды и частоты.
При отсутствии сил трения полная механическая энергия системы не изменяется:
 (5.12)
(5.12)
Графически зависимости кинетической, потенциальной и полной механической энергий колеблющейся системы от времени показаны на рис. 5.7, а.
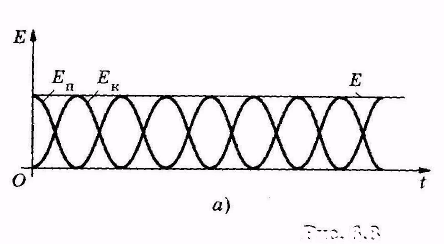
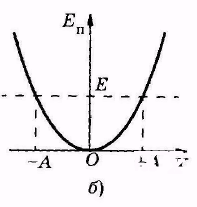
| Рис.5.7 |
Потенциальная яма (ограниченная область пространства, в которой потенциальная энергия меньше, чем в не её), соответствующая гармоническому колебанию, изображена на рис. 5.7, б. Она определяется зависимостью  . Отложив на оси ординат полную механическую энергию Е, по графику определяют интервал координат (-А, +А), за пределы которого частица, обладающая такой энергией, выйти не может.
. Отложив на оси ординат полную механическую энергию Е, по графику определяют интервал координат (-А, +А), за пределы которого частица, обладающая такой энергией, выйти не может.
§6.2 Затухающие колебания
До сих пор мы рассматривали свободные колебания материальной точки без учёта сопротивления среды, в которой происходят эти колебания.
В реальных условиях на колеблющееся тело всегда действуют силы сопротивления (трения), в результате чего амплитуда с течением времени уменьшается и колебания становятся затухающими.
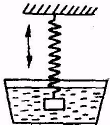
| Рис.5.8 |
Пусть маятник колеблется в вязкой среде (рис.). В этом случае на осциллятор кроме возвращающей силы Fупр = -kx будет действовать ещё одна сила – сила сопротивления среды Fс. При малых колебаниях скорость движения осциллятора мала, поэтому сила сопротивления пропорциональна скорости и направлена в противоположную сторону:
 (5.13)
(5.13)
где r – коэффициент сопротивления среды, зависящий от плотности среды и геометрических размеров осциллятора; υ — относительная скорость движения осциллятора и среды.
Уравнение затухающих колебаний записывается в виде:
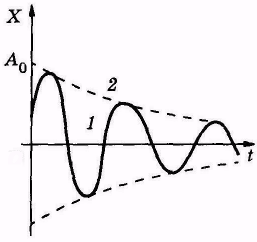
Выражение А=±А0 е -δ t , есть переменная во времени амплитуда колебания; А0— амплитуда в момент t = 0; ω -частота затухающих колебаний; φ0-начальная фаза колебаний.
| Рис. 6.9 |
График этой функции изображён на рисунке (кривая 1)пунктирнаялиния 2изображает ход убывания амплитуды. Материальная точка колеблется по закону синуса, но амплитуда колебания с течением времени уменьшается по экспоненте. Затухания происходят тем быстрее, чем больше δ, т.е. с увеличением внутреннего трения среды и уменьшением массы осциллятора.
Наглядной характеристикой затухания является отношение двух амплитуд, отличающихся по времени на период Т. Это соотношение называется декрементом затухания
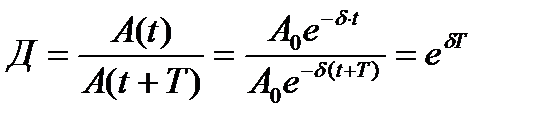 (5.15)
(5.15)
Прологарифмируем это выражение:
 (5.16)
(5.16)
Значение θ=δТ называется логарифмическим декрементом затухания.
Время  в течении которого амплитуда убывает в е раз, называется временем жизни колеблющейся точки. За время жизни τ система успевает совершить N колебаний.
в течении которого амплитуда убывает в е раз, называется временем жизни колеблющейся точки. За время жизни τ система успевает совершить N колебаний.
 (5.17)
(5.17)
Следовательно, логарифмический декремент затухания есть величина, обратная числу колебаний осциллятора за время его жизни.
Период затухающих колебаний зависит от коэффициента сопротивления rи определяется формулой:
 (5.18)
(5.18)
§6.3 Вынужденные колебания. Резонанс
Для того, чтобы колебания осциллятора были незатухающими, надо компенсировать потери энергии на преодоления сопротивления среды. Это можно сделать следующим способом. Пусть пружинный маятник с железным грузом находится в поле тяжести электромагнита, по обмотке которого проходит переменный ток:
Магнитная сила, действующая на маятник, меняется по тому же закону Fв=F0sinωt. Эта периодически изменяющаяся внешняя сила, действующая на осциллятор, называется вынуждающей силой.
Колебания, возникающие под действием внешней периодически изменяющейся силы, называют вынужденными колебаниями.
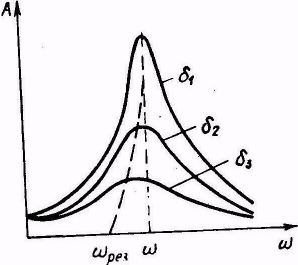
| Рис.6.11 |
Зависимость амплитуды колебаний от частоты вынуждающей силы при различных δ приведены на рис. При ω → 0 амплитуда стремится к предельной величине, равной смещению осциллятора под действием постоянной силы F0:
 (6.42)
(6.42)
Когда частота вынуждающей силы приближается к частоте собственных колебаний осциллятора, амплитуда колебаний возрастает и при некоторой частоте достигает максимального значения. Это явление называется резонансом.
Существуют и такие колебательные системы, которые сами регулируют периодическое восполнение растраченной энергии и поэтому могут колебаться длительное время. Незатухающие колебания, существующие в какой-либо системе при отсутствии переменного внешнего воздействия, называются автоколебаниями, а сами системы — автоколебательными. Амплитуда и частота автоколебаний зависят от свойств самой автоколебательной системы, в отличие от вынужденных колебаний они не определяются внешними воздействиями.
Классическим примером механической автоколебательной системы являются часы, в которых маятник (или баланс) является колебательной системой, пружина (или поднятая гиря) — источником энергии, а анкер — регулятором поступления энергии от источника в колебательную систему. Некоторые биологические системы (сердце, легкие) являются автоколебательными.
Дата добавления: 2015-12-08 ; просмотров: 1884 ; ЗАКАЗАТЬ НАПИСАНИЕ РАБОТЫ
Источник
Савельев И.В. Курс общей физики, том I
![]()
Загрузить всю книгу 

Титульный лист
Главная редакция физико-математической литературы
Механика, колебания и волны,
КУРС ОБЩЕЙ ФИЗИКИ, ТОМ I
Главная цель книги — познакомить студентов прежде всего с основными идеями и методами физики. Особое внимание обращено на разъяснение смысли физических законов и на сознательное применение их. Несмотря на сравнительно небольшой объем, книга представляет собой серьезное руководство, обеспечивающее подготовку, достаточную для успешного усвоения в дальнейшем теоретической физики и других физических дисциплин.
Предисловие к четвертому изданию
При подготовке к настоящему изданию книга была значительно переработана. Написаны заново (полностью или частично) параграфы 7, 17, 18, 22, 27, 33, 36, 37, 40, 43, 68, 88. Существенные добавления или изменения сделаны в параграфах 2, 11, 81, 89, 104, 113.
Ранее, при подготовке ко второму и третьему изданиям были написаны заново параграфы 14, 73, 75. Существенные изменения или добавления были внесены в параграфы 109, 114, 133, 143.
Таким образом, по сравнению с первым изданием облик первого тома заметно изменился. Эти изменения отражают методический опыт, накопленный автором последние десять лет преподавания обшей физики в Московском инженерно-физическом институте.
Ноябрь 1969 г. И. Савельев
Из предисловия к четвертому изданию
Предлагаемая вниманию читателей книга представляет собой первый том учебного пособия по курсу общей физики для втузов. Автор в течение ряда лет преподавал общую физику в Московском инженерно-физическом институте. Естественно поэтому, что пособие он писал имея в виду прежде всего студентов инженерно-физических специальностей втузов.
При написании книги автор стремился познакомить учащихся с основными идеями и методами физической науки, научить их физически мыслить. Поэтому книга не является по своему характеру энциклопедичной, содержание в основном посвящено тому, чтобы разъяснить смысл физических законов и научить сознательно применять их. Не осведомленности читателя по максимально широкому кругу вопросов, а глубоких знаний фундаментальным основам физической пауки — вот что стремился добиться автор.
Источник



