
Способы движения агрегатов при выполнении полевых работ
Пахота. Желательно направлять агрегат поперек предыдущей пахоты или склона (в целях борьбы с водной эрозией почвы).
Перед началом работы поле должно быть разбито на отдельные загонки С (рис. 61, а), которые следует обрабатывать так, чтобы чередовалась вспашка «всвал» и «вразвал». При этом важно правильно определить размеры загонок, так как при малой их ширине на поле будет большое количество свальных гребней и разъемных борозд, а при большой ширине будет затрачиваться много времени на холостые переезды (повороты) агрегата, что, в свою очередь, снижает выработку.
Рекламные предложения на основе ваших интересов:
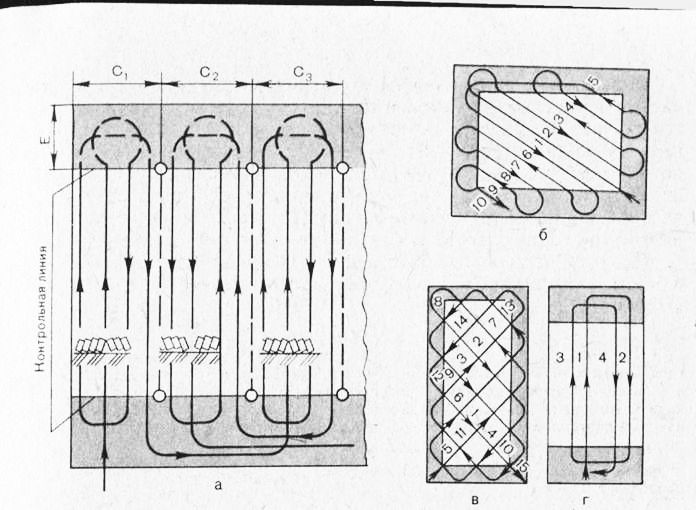
Рис. 61. Способы движения тракторных агрегатов:
а — челночный; б — диагональный; в — диагонально-перекрестный; г — с перекрытием: I… 15 — последовательность движения агрегата; Си Сг и Сз — загонки; Е — поворотная полоса.
В зависимости от длины гона и состава агрегата рекомендуются следующие ширины загонок С.
Сплошная культивация. Первую культивацию проводят поперек направления вспашки или под углом к ней, а повторную — поперек предыдущим культивациям. Предпосевная обработка не должна совпадать с направлением посева. Основной способ движения агрегата челночный (рис. 61, а), кроме того, можно обрабатывать диагонально-перекрестным (рис. 61, в). Широкозахватные агрегаты с прицепными универсальными сцепками следует вести по схеме с «перекрытием» (рис. 61, г).
Боронование. Предпосевное боронование проводят поперек или под углом к предполагаемому направлению посева, а вспаханное поле обрабатывают поперек или под углом к направлению вспашки. Рядковые посевы боронуют поперек к направлению рядков растений, а перекрестные — под острым углом к направлению рядков по диагонали (рис. 61, б). Основной способ движения — челночный. На полях квадратной или прямоугольной формы можно применять диагонально-перекрестный способ, а на полях небольших размеров, если выезд за пределы поля ограничен, — вкруговую.
Посев зерновых колосовых и зернобобовых культур. Направление посева определяют до предпосевной обработки поля. Его следует устанавливать под углом к направлению предполагаемой обработки. Желательно, чтобы длина гона при посеве была наибольшей. На склонах следует сеять поперек направления склона.
Основной способ движения — челночный, возможно применение диагонально-перекрестного. Диагонально-перекрестный и перекрестный посевы следует проводить на полях, площадь которых позволяет завершить посев за 2…3 дня. Диагонально-перекрестный способ посева нужно использовать только на полях квадратной формы.
Посев и посадка пропашных культур. Направление посева или посадки также необходимо определить до выполнения предпосевной обработки поля, направление которой должно быть выбрано под углом или поперек будущего посева или посадки. Квадратно-гнездовой способ нужно вести вдоль склона поля. Пунктирный посев на участках, подверженных действию эрозии почвы, выполняют поперек склона. Основным способом движения считается челночный.
Снегозадержание. Направление валов снега должно быть перпендикулярно направлению господствующих ветров, а также поперек склонов.
Наилучший способ движения — вкруговую по раскручивающейся спирали от центров участков прямоугольной формы, на которые должно быть разбито поле.
Источник
Способы движения агрегатов и их оценка
Различают три основных вида движения агрегатов (по направлению рабочих ходов относительно границ рабочего участка): гоновый (рабочие ходы вдоль одной из сторон участка), диагональный (под углом, диагонально к сторонам участка, разновидность — диагонально-перекрестный) и круговой (рабочий ход вдоль всех сторон участка или загона, различают круговое движение к центру или к периферии участка).
Круговые способы движения представлены на рисунке 8.4. Движение вкруговую выполняется чаще всего по свертывающейся спирали, от периферии к центру (рис. 8.4а), в этом случае не нужна разметка центральной части. Способ (рис. 8.4б) отличается наличием внутренних поворотных полос, которые либо готовятся заранее (прокашиваются, убираются), либо заделываются после обработки загона или участка. Способ (рис. 8.4в) — обработка от центра, в этом случае надо найти центр и разметить место и длину первого прохода.
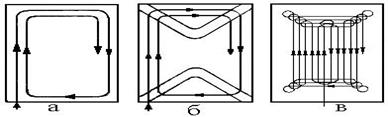
Рисунок 8.4 – Разновидности круговых способов движения:
а — при свертывающейся спирали без выключения рабочих органов и поворотных полос; б — то же, но с внутренними поворотными полосами; в — по развертывающейся спирали, конвертный способ
На рисунке 8.5 представлены диагональные способы движения для рабочих участков или загонов по форме близких к квадрату. Если загон имеет форму вытянутого прямоугольника, то он делится разбивкой на части, близкие к квадратной форме. Если здесь нужны поворотные полосы, то они отбиваются вдоль всех сторон участка.
|
На рисунке 8.6 представлены наиболее распространенные гоновые способы движения. Способ движения перекрытием беспетлевой, однако нуждается в частой разметке поля, лучше использовать при обработке уже размеченного поля (в виде рядков растений, когда надо просто отсчитать необходимое число рядков). Челночный способ движения однообразен и легок по выполнению. Способы движения всвал и вразвал наиболее распространены (чередованием по загонам) на вспашке. Их комбинированное использование на одном загоне позволяет получить беспетлевой способ движения при вспашке.
Различные способы движения агрегатов сравнивают по качеству выполнения технологической операции, удобству обслуживания, безопасности работы, затратам на подготовку рабочего участка. Все показатели тесно связаны с выполняемой работой, размерами рабочего участка, составом агрегата и его кинематическими характеристиками. Все это удобнее рассмотреть при изучении технологии выполнения отдельных сельскохозяйственных работ.
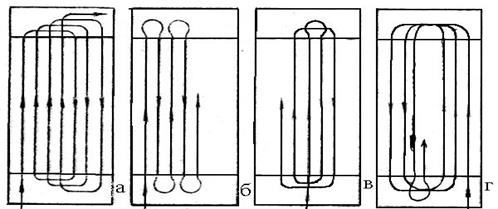
Рисунок 8.6 – Гоновые способы движения:
а — перекрытием; б — челночный; в — всвал; г — вразвал
Одной из главных оценок способов движения, влияющих на производительность агрегатов, является коэффициент рабочих ходов или степень использования пути
 , (8.6)
, (8.6)
где ΣLр и ΣLх — суммарная длина рабочих и холостых ходов на загоне; nр и nх — число рабочих и холостых проходов на загоне.
Для всех гоновых способов движения Lр=Lуч-2Е, а nр=nх=С/Вρ. В длину холостых ходов нужно включать не только длину пути на поворотах, но и дополнительные проходы, связанные с заделкой поворотных полос, проходы с неполной шириной захвата, заезды и переезды на рабочем участке.
При беспетлевых гоновых способах движения средняя длина холостого хода Lх.ср=1.14ρу+0.5С+2е и отсюда коэффициент рабочих ходов
 . (8.7)
. (8.7)
Для петлевых способов движения (всвал, вразвал) на участках шириной до 2ρу имеют место петлевые повороты, их число nпетл=2ρу/Вρ. Длина петлевых холостых ходов на загоне составила бы ΣLх петл=(2ρу/ Вρ)(6ρу+е). Если бы эти повороты выполнялись без петель (при ширине участка 2ρу), то их общая длина ΣLхбесп=(1.14ρу+2е+ρу)2ρу/Вρ. Тогда разница в длине холостого хода составит ΔLх=3.86ρу2ρуВρ≈ 8ρу 2 /Вρ. С учетом (8.6) и отнеся ΔLх к числу проходов nр=С/8ρу, получим коэффициент рабочих ходов для петлевых (всвал, вразвал) способов движения
 . (8.8)
. (8.8)
Для челночного способа движения все холостые ходы одинаковы Lх=6ρу+2е и коэффициент рабочих ходов
 . (8.9)
. (8.9)
Оптимальная (по производительности) ширина загона Сопт определяется из условия минимальной суммарной длины холостых или максимального коэффициента рабочих ходов на участке.
Суммарная длина холостых ходов на участке Sх.уч=ΣLх(Суч/С), тогда для петлевого способа движения с учетом (8.7)
 . (8.10)
. (8.10)
Возьмем первую производную для Sх уч по ширине загона С и приравняем ее нулю
 ,
,
 . (8.11)
. (8.11)
Минимальная (по возможности осуществления) ширина загона (Сmin) применима только к беспетлевым способам (например, способ движения перекрытием, комбинация всвал-вразвал). Беспетлевой поворот возможен только при Х≥2ρу, если загон будет содержать три или четыре таких минимальных делянки, то и минимальная ширина загона для беспетлевого способа движения будет равна шести или восьми условным радиусам поворота агрегата.
Для беспетлевых способов движения, как правило, расчетное значение Сопт меньше Сmin и, следовательно, физически не может быть осуществлено. Поэтому для беспетлевых способов Сопт обычно не рассчитывают, а принимают равным Сmin.
Коэффициент рабочих ходов для петлевых способов движения (С=Сопт) определяется по формуле
 , (8.12)
, (8.12)
а для беспетлевых способов движения (С=Сmin) равен
 . (8.13)
. (8.13)
При выборе того или иного способа движения надо исходить в первую очередь из агротехнических требований — качества работы, удобства обслуживания, возможности уменьшения вспомогательных операций и т.д. Если эти условия позволяют применять различные способы движения, следует выбирать тот, который дает более высокое значение φ.
Наибольшее влияние на значение коэффициента рабочих ходов оказывает Lр. Чем больше радиус поворота ρу, тем меньше φ. Ширина загона С почти не оказывает влияния на φ при челночном способе движения. Отклонение от Сопт и Сmin в сторону увеличения с целью обеспечения целого числа проходов агрегата на загоне, удобства разбивки на загоны и т.д. не дает существенного уменьшения φ. В случае отклонения от Сопт в сторону уменьшения ширины загона величина φ снижается значительно.
Вопросы для самоконтроля знаний
1. Что понимается под кинематикой агрегата?
2. Перечислите кинематические характеристики МТА, дайте их характеристику.
3. Какие виды поворотов МТА Вы знаете?
4. Запишите формулу для расчета длины грушевидного поворота.
5. Запишите формулу для расчета минимальной ширины поворотной полосы для различных видов поворота.
6. Какие виды движения МТА Вы знаете?
7. Назовите способы движения МТА при гоновом виде движения.
8. Изобразите способы движения МТА «перекрытием», «челночный», «всвал» и « «вразвал».
9. Запишите формулу для расчета коэффициента рабочихходов МТА.
10. Запишите формулу для расчета оптимальной ширины загона для беспетлевого способа движения МТА.
Источник
Логистика полевых сельскохозяйственных работ
05 Января 2020, Вс
Время чтения 7 минут
Комплектование агрегата
Правильно скомплектованный агрегат должен отвечать следующим основным требованиям:
- соответствовать требованиям агротехники, обеспечивать высокое качество выполнения технологического процесса;
- обеспечивать рациональное использование машин с наибольшей производительностью и наименьшими затратами труда, средств и энергии;
- быть удобным в обслуживании и эксплуатации.
Подготовка агрегата к работе включает подготовку трактора, сцепки, рабочих машин, проверку их технологического состояния; составление и регулировку агрегата на площадке; оборудование агрегата при необходимости дополнительными устройствами (маркерами, следоуказателями, сигнализацией, визирными приспособлениями). Указания по подготовке агрегатов к работе и их технологической настройке проводятся с учетом рекомендаций типовых операционных технологий, руководств по эксплуатации сельскохозяйственных машин.
Рабочая ширина агрегата определяется по формуле: Вр = ВK * b, где ВK – конструктивная ширина захвата агрегата, м; b – коэффициент использования ширины захвата (табл. 1).
| Сельскохозяйственные машины | b |
| Бороны зубовые прицепные | 0,98 |
| Культиваторы паровые | 0,96 |
| Лущильники дисковые | 0,96 |
| Сеялки зерновые | 1,00 |
| Сажалки | 1,00 |
| Жатки зерновые | 0,93-0,95 |
| Комбайны зерновые (при прямом комбайнировании) | 0,96 |
| Комбайны кукурузо-силосоуборочные | 1,00 |
| Культиваторы пропашные | 1,00 |
| Плуги | 1,10 |
Табл. 1. Предельно-допустимые значения коэффициента использования конструктивной ширины захвата агрегата.
Подготовка поля
- Осматривают поле и устраняют причины (препятствия), которые могут снизить качество или создать неблагоприятные условия для работы агрегата.
- Обозначают неустранимые препятствия, выбирают способ и направление движения, по которому устанавливают расположение загонов.
- Отбивают поворотные полосы, провешивают линии первого прохода и нарезают контрольные борозды при гоновом движении.
- Разбивают поле на загоны и делают прокосы на поворотных полосах или углах загонов при уборке.
Выбор способа движения агрегата
Выбор способа движения основывается на особенностях технологического процесса и предусматривает получение максимальной производительности, экономичности и соблюдение агротехнических требований.
Из общего пути, проходимого агрегатом, в среднем 8-12% (а на коротких участках до 40%) приходится на холостые заезды на загонах, причем для конкретного поля длина холостых заездов зависит от правильного выбора способа движения. Всякий лишний километр, пройденный агрегатом вхолостую, – это непроизводительная затрата времени и топлива. Сокращение холостого движения МТА повышает его рабочий путь за смену, что способствует росту производительности труда, снижению затрат энергии.
Выбор способа движения агрегата влияет на качество выполняемой операции. Например, чередование вспашки загонов, расположенных рядом, способом движения «всвал-вразвал» вдвое уменьшает количество свальных гребней и развальных борозд, сокращает объем дополнительной работы на их разравнивание.
В ряде случаев неудачный выбор способа движения и связанных с ним поворотов агрегата на поворотной полосе приводит к неравномерному износу сборочных единиц управления поворотом и ходовой части.
Таким образом, правильный выбор рациональных способов движения агрегатов имеет большое значение для повышения качественных и технико-экономических показателей их работы.
При выборе направления движения агрегата необходимо учитывать направление предыдущей обработки, конфигурацию поля и применяемые машины, а также меры по предупреждению обрабатываемого участка от водной эрозии. Существуют различные способы движения агрегата: гоновые (наиболее распространенные), круговые, диагональные. В зависимости от этого работы подразделяются на:
- I группа – работы, выполняемые симметричными агрегатами при гоновом или диагональном движении: посев, культивация, междурядная обработка, опрыскивание и др. Наиболее часто на этих работах пользуются челночным способом движения, а в случае агротехнической целесообразности – перекрестным.
- II группа – работы, выполняемые асимметричными агрегатами при гоновом движении. Таковы в первую очередь все виды пахотных работ, а также уборка свеклоуборочным агрегатом, кукурузным початкоотрывателем и др. На этих работах наиболее часто применяют способы движения всвал, вразвал, с чередованием загонов всвал и вразвал.
- III группа – работы, выполняемые агрегатами при круговом способе движения, главным образом по уборке зерновых и других культур.
 Рис. 1. Способы гонового движения агрегатов: а) челночный с грушевидным поворотом; б) челночный с беспетлевым поворотом; в) движение с заездом на смежный загон (с чередованием загонов); г) и д) с одним петлевым поворотом в начале движения всвал и в развал, для плужного агрегата.
Рис. 1. Способы гонового движения агрегатов: а) челночный с грушевидным поворотом; б) челночный с беспетлевым поворотом; в) движение с заездом на смежный загон (с чередованием загонов); г) и д) с одним петлевым поворотом в начале движения всвал и в развал, для плужного агрегата.
Источник: Система земледелия Республики Татарстан.
Источник



