
Способы для поиска сигналов
Идеи Н. С. Кардашева открывали хорошие перспективы для поиска радиосигналов ВЦ. Надо было с чего-то начать. Осенью 1963 г. И. С. Шкловский и Н. С. Кардашев обсудили эту проблему с академиком В. А. Амбарцумяном, который предложил для оценки состояния проблемы и выработки практических рекомендаций провести научное совещание и согласился с тем, чтобы оно проходило в Бюраканской астрофизической обсерватории (Армения), директором которой он был.
Первое Всесоюзное совещание по проблеме «Внеземные цивилизации» состоялось 20-23 мая 1964 г. Оно было организовано Астрономическим советом Академии наук СССР, Государственным астрономическим институтом им. П. К. Штернберга и Бюраканской Астрофизической обсерваторией. Состав участников был не очень широк; в основном это были астрономы, радиоастрономы и радиофизики 21 . Среди них ведущие советские радиоастрономы: С. Э. Хайкин, И. С. Шкловский, B.C. Троицкий, Н. Л. Кайдановский, Н. С. Кардашев, Ю. Н. Парийский, В. А. Разин, Г. М. Тов-масян и др.; крупнейшие радиофизики: В. А. Котельников, А. А. Пистолькорс, В. И. Сифоров; специалисты по космической связи: Е. Л. Богуславский, Е. Ф. Дубовицкая; из астрономов принимали участие Б. В. Кукаркин, Д. Л. Мартынов, Б. Л. Маркарян, Э. Е. Хачикян, И. Д. Новиков и др.; физику представлял Л. Б. Зельдович, математику А. В. Гладкий. Совещание проходило под председательством В. А. Амбарцумяна.
Круг вопросов, которые обсуждались на совещании, можно разбить на три группы: а) общие проблемы ВЦ (физические условия, необходимые для возникновения и развития жизни, множественность обитаемых миров и ожидаемая распространенность технически развитых цивилизаций, характер и уровень их развития, возможные типы контактов между цивилизациями); б) проблема установления связи с ВЦ (оптимальный диапазон частот, возможная длительность и информативность связи, ожидаемые свойства искусственных радиоисточников, методы их обнаружения); в) проблема языка для межзвездной связи.
Совещание пришло к выводу, что проблема контакта с внеземными цивилизациями является важной и актуальной научной проблемой, которая вполне назрела, поскольку «имеются реальные предпосылки для постановки исследований и опытов» в этом направлении. Была подчеркнута необходимость планомерного экспериментального и теоретического изучения проблемы ВЦ.
В отношении методики поиска сигналов на совещании выявились два подхода, две различные точки зрения. Первое направление — поиск сигналов от цивилизаций нашего или несколько более высокого уровня (цивилизации I типа по Кардашеву). Методика поиска подобных цивилизаций исходит из того, что для обеспечения разумной дальности связи передающая цивилизация использует узкополосное и узконаправленное радиоизлучение (узкополосность служит также критерием искусственности).
Идею использования узкополосных сигналов для межзвездной связи активно отстаивал В. С. Троицкий 22 . Он не связывал такие сигналы с какой-то универсальной частотой (например, с радиолинией 21 см), а считал необходимым осуществлять поиск во всем оптимальном диапазоне волн (сантиметровые и дециметровые волны). В частности, он обратил внимание на целесообразность поиска около линий радиоизлучения отдельных молекул, применяемых в молекулярных генераторах и усилителях: линия аммиака на волне 1,25 см и линия формальдегида на волне 0,4 см.
Для обнаружения подобных сигналов, как уже отмечалось выше, необходимо осуществлять поиск по частоте и поиск по направлению. Простейшая стратегия состоит в том, что обе цивилизации, передающая и принимающая, осуществляют взаимный поиск, обследуя множество подходящих звезд, поочередно направляя антенны на них. Однако в этом случае очень велика вероятность пропуска сигнала. Чтобы исключить пропуск сигнала, В. А. Котельников предложил создать непрерывно действующую многоантенную систему обнаружения, перекрывающую весь небесный свод и обеспечивающую поиск по частоте в пределах выбранного оптимального диапазона волн 23 . С этой целью каждая антенна должна быть оборудована многоканальным приемником; полоса каждого канала порядка 1 Гц, для перекрытия оптимального диапазона требуется 10 9 -10 10 спектральных каналов.
Блок-схема приемника Котельникова приведена на рис. 1.5.1. Здесь А — антенна, У — усилитель, в котором происходит усиление и преобразование частоты принимаемых сигналов, Φ — фильтры с полосой Δf, Д — детекторы, И — интеграторы, суммирующие энергию, прошедшую через фильтр за время посылки длительностью τ, Π — пороговые устройства, которые дают сигнал на выходе только в том случае, когда энергия, прошедшая через фильтр за время τ превышает установленное пороговое значение.
Приемник позволяет обнаружить сигнал, но не дает возможность принимать информацию, если при передаче используется одна из систем амплитудной модуляции. Можно однако, передавать информацию, меняя частоту сигнала от посылки к посылке. Тогда сигнал будет появляться то в одном, то в другом канале приемника), причем с каждой новой посылкой он будет регистрироваться в каждом новом канале.
Появление сигнала в данном канале можно рассматривать как определенное сообщение. Скорость передачи информации в такой системе будет составлять (log2N)/τ бит в секунду (N — число спектральных каналов в приемнике). А полное количество информации, которое можно передать за время одной посылки длительностью τ, равно log2N, что при N = 10 9 -10 10 составляет приблизительно 30 бит.
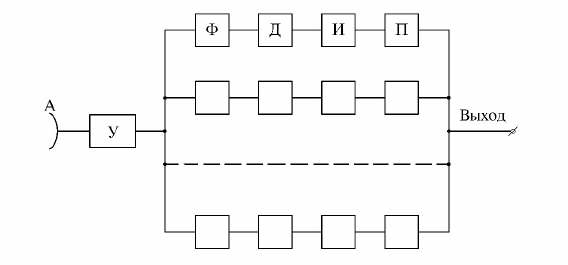
Рис. 1.5.1. Многоканальный приемник В. А. Котельникова для поиска сигналов ВЦ:
А — антенна, У — усилитель, Φ — узкополосные фильтры, И — интеграторы, Π — пороговые устройства
Стратегия поиска при использовании подобной системы, согласно В. А. Котельникову, состоит в следующем. Рассмотрим две цивилизации А и В, расположенные на расстоянии R друг от друга. Цивилизация А ведет передачу, цивилизация В работает на прием. Осуществляя поиск по направлению, цивилизация А последовательно «обшаривает» лучом своей антенны все небо, при этом длительность посылки сигнала в данном направлении равна τ. Пусть телесный угол луча антенны равен ω. Тогда для обхода небесной сферы требуется время t0=4πτ/ω. Поскольку цивилизация В, как мы предположили, имеет систему обнаружения, охватывающую все небо, одна из антенн этой системы смотрит на цивилизацию А. Приемник, связанный с этой антенной, зафиксирует сигнал в момент, когда сканирующая антенна цивилизации А окажется направленной на цивилизацию В. Эксперимент по обнаружению сигнала должен длиться в течение времени t, значительно превышающего t0. Тогда за время проведения эксперимента сигнал будет зарегистрирован несколько раз (вообще говоря, в разных каналах) через равные промежутки времени t0, что позволит уверенно отличить его от случайных помех.
Какова же длительность эксперимента при подобном поиске? Примем, что длительность посылки в данном направлении τ = 3 с. Пусть площадь передающей антенны S1 = 10 5 м 2 , длина волны λ = 10 см; тогда ω = λ 2 /S1 = 10 -7 , t0 = 3,8 · 10 8 с ≈ 12 лет. А полное время эксперимента в этом случае будет составлять
10 2 лет. Это время можно существенно сократить, если цивилизация А, вместо того, чтобы «обшаривать» все небо, будет последовательно облучать все подходящие звезды в сфере радиуса R, быстро переводя антенну с одной звезды на другую. Пусть, например, система рассчитана на дальность связи 3000 св. лет, т. е. обе цивилизации предполагают, что расстояние между ними не превышает 3000 св. лет. В сфере такого радиуса содержится
10 8 звезд. Поскольку каждая звезда облучается в течение 3 секунд, то (пренебрегая временем на перестановку антенны) полное время облучения всех звезд составит 3 · 10 8 с или 10 лет. То есть оно того же порядка, как и при обходе всего неба. Однако нет необходимости облучать все звезды. Цивилизация А должна выбрать только те из них, около которых можно ожидать наличие технически развитых цивилизаций. В. А. Котельников принял, что доля таких «подходящих» звезд составляет 1 %. Тогда время их облучения будет составлять 0,1 года. Если эксперимент длится 1 год, то за это время сигнал появится 10 раз через каждые 36 дней.
Каковы параметры системы обнаружения? Пусть мощность передатчика составляет 10 9 Вт, λ = 10 см, τ = 3 с. Оптимальные условия обнаружения радиоизлучения реализуются, когда полоса каждого канала Δf = 1/τ. Будем считать, что это условие выполнено. Пусть шумовая температура приемника ТIII = 30 К, и пусть у приемника установлено значение порога, при котором вероятность ложного срабатывания и вероятность пропуска сигнала составляет 10 -5 . Чтобы при этих условиях обнаружить сигнал на расстоянии 3000 св. лет, надо иметь приемную антенну площадью 900 м 2 . Чтобы с помощью таких антенн перекрыть весь небесный свод, надо иметь более миллиона антенн (см. табл. 1.5.1). При этом не следует забывать, что каждая такая антенна оборудуется многоканальным приемником, содержащим 10 9 -10 10 спектральных каналов. Конечно, создание подобной системы чрезвычайно сложная задача.
Параметры системы весьма чувствительны к расстоянию между цивилизациями. Если система рассчитана на 1400 св. лет, то для обнаружения требуется 250 тысяч более скромных антенн площадью 200 м 2 каждая. При этом время обходы всех подходящих звезд составляет 3,6 дня. Если эксперимент по-прежнему длится 1 год, то за это время сигнал должен появиться 100 раз. В этом случае можно разделить небосвод на 10 частей и последовательно обследовать каждую из них. Тогда, чтобы перекрыть исследуемую часть неба, количество антенн можно сократить в 10 раз, что составит 25 тысяч антенн. Длительность обследования каждой части неба — 36 дней, за это время сигнал должен появиться 10 раз. При расстоянии 300 св. лет система должна содержать 11 тысяч совсем небольших антенн площадью 9 м 2 . При этом время обхода всех подходящих звезд, при принятых параметрах передающей системы, составит всего 1 час; небосвод можно разделить на 1000 частей, для перекрытия каждой из которых потребуется только 11 антенн. В этом случае система обнаружения вырождается в несколько антенн, последовательно (по частям) обследующих небесный свод.
Таблица 1.5.1 Параметры многоантенной системы обнаружения24
Источник
Способы для поиска сигналов
2. Методы поиска и обнаружения сигналов по частоте.
2.1 Одновременный поиск (беспоисковый способ).
Реализуется с помощью многоканального приемника. АХЧ Кф i ( f ) канальных полосовых фильтров с полосой D fi , примыкая друг к другу, перекрывают диапазоны разведки D fp (рис.3)

Рис.3 Полосы пропускания канальных фильтров беспоискового приемника
Показатели способа: коэффициент перекрытия фильтра  ; диапазон разведываемых частот
; диапазон разведываемых частот  или
или  ; максимальная ошибка измерения несущей частоты
; максимальная ошибка измерения несущей частоты  ; среднеквадратическая ошибка
; среднеквадратическая ошибка  ; число канальных фильтров
; число канальных фильтров  ; разрешающая способность
; разрешающая способность  . Обнаружение сигнала происходит практически мгновенно с
. Обнаружение сигнала происходит практически мгновенно с  .
.
Частота сигнала определяется частотой соответствующего фильтра.
Для уменьшения числа каналов применяют фильтры, полоса прозрачности которых растет с номером канала, а  .
.
Пример реализации способа для приемника прямого усиления приведен на рис.4

Рис.4 Структурная схема многоканального приемника
Отдельный приемный канал включает полосовой фильтр Ф i , с крутыми срезами, амплитудный детектор, видеоусилитель и индикаторное устройство, с помощью которого фиксируется попадание сигнала в данный канал. Одна антенна может обслуживать несколько каналов. С помощью регистрирующего устройства осуществляется обнаружение сигналов на выходе каждого канала и регистрация частот обнаруживаемых сигналов.
Многоканальные приемники могут быть также построены по схеме супергетеродина.
Многоканальные приемники применяют, как правило, в станциях общей обзорной разведки для грубого определения несущей частоты и типа разведуемого РЭС. Число каналов в них может достигать несколько десятков, а иногда и сотен. Основное достоинство многоканальных приемников — их простота и надежность. Применение микроэлектронной элементной базы позволяет создавать многоканальные структуры с очень большим количеством каналов при малых габаритах, весе и потреблении энергии.
Модификацией многоканального является матричный приемник, позволяющей существенно сократить число каналов, обеспечив высокие показатели по точности измерения частоты и разрешающей способности.
Структурная схема матричного приемника содержит п столбцов по т строк в каждом (рис. 5).

Рис. 5- Структурная схема матричного приемника


АЧХ фильтров Определение частоты
2.2 Последовательный поиск по частоте.
Просмотр заданного диапазона частот производится периодически, обычно по пилообразному закону (рис.6).

Рис.6 Пояснение поискового способа определения несущей частоты
Основные характеристики способа :  — диапазоны разведываемых частот;
— диапазоны разведываемых частот;
 — полоса пропускания приемника;
— полоса пропускания приемника;
 — период перестройки;
— период перестройки;
 — время приемного сигнала на фиксированной частоте;
— время приемного сигнала на фиксированной частоте;
 — скорость перестройки;
— скорость перестройки;
 — разрешающая способность по частоте;
— разрешающая способность по частоте;
 — СКО измерения частоты.
— СКО измерения частоты.
Из физического смысла следует, что  .
.
Если сигнал непрерывный, то его обнаружение и измерение частоты происходит мгновенно с Р=1.
Обнаружение и измерение частоты импульсного сигнала носит вероятностный характер.
Вероятность обнаружения импульсного сигнала за один цикл перестройки приемника зависит от соотношения между  и
и  .
.
Различают три вида поиска: медленный, быстрый и средний.
а) Медленный поиск. Условие  Тпр f > Т u . В этом случае Робн=1 за время перестройки Tf при условии, что время облучения средства разведки импульсами разведываемой РЭС не менее периода перестройки: Тобл ³ Т f . Это значит, что скорость перестройки настолько мала, что за интервал времени Тпр f (частота разведываемого сигнала пребывает в полосе пропускания) на вход приемника обязательно поступит хотя бы один импульс t u РЭС или его часть, не меньшая, чем t min (постоянная времени переходных процессов).
Тпр f > Т u . В этом случае Робн=1 за время перестройки Tf при условии, что время облучения средства разведки импульсами разведываемой РЭС не менее периода перестройки: Тобл ³ Т f . Это значит, что скорость перестройки настолько мала, что за интервал времени Тпр f (частота разведываемого сигнала пребывает в полосе пропускания) на вход приемника обязательно поступит хотя бы один импульс t u РЭС или его часть, не меньшая, чем t min (постоянная времени переходных процессов).
Недостатки медленного поиска: большое время разведки, малая пропускная способность, пропуск кратковременно работающих РЭС.
б) Быстрый поиск . Условие Tf t u .Тогда Робн=1 независимо от Тобн станции разведки сигналами РЭС. Это важное достоинство быстрого поиска.
Скорость перестройки настолько велика, что за время t u приемник успевает настроиться на частоту сигнала и на его вход обязательно наступит хотя бы часть импульса, не меньшая, чем t min .
Для быстрого поиска скорость перестройки обеспечивается до 10 4 МГц/мкс и реализуется электронным способом.
Скорость перестройки ограничивается расширением и искажением формы динамической АЧХ, приводящей к ухудшению d f , s f , чувствительности приемника (рис.7).

Рис.7 Динамическая АЧХ приемника с быстрой перестройкой.
в) Поиск со средней скоростью. Позволяет найти компромисс между скоростью и точностью определения частоты. Условие поиска:
По аналогии с пеленгацией вероятность обнаружения за время разведки tp = nTf (где n – число циклов перестройки) определяется формулой:

Вывод: вероятность обнаружения возрастает при увеличении tp , D f пр и уменьшении D fp .
Реализация поискового способа возможна с помощью перестраиваемых приемников прямого усиления или супергетеродинного.
В приемнике прямого усиления (рис. 8) применяют два синхронно перестраиваемых фильтра Ф1 и Ф2. Фильтр Ф1 ограничивает полосу пропускания приемника до полосы пропускания усилителя радиочастоты (УРЧ). Фильтр Ф2 ограничивает полосу пропускания после УРЧ, что приводит к существенному уменьшению мощности шумов с выхода УРЧ и, следовательно, повышению чувствительности приемника.

Рис.8 — Поисковый приемник прямого усиления.
Перестройка фильтров осуществляется с помощью схемы управления перестройкой (СУП). Эта же схема используется для введения данных о текущем значении частоты настройки фильтров в схему измерения частоты (СИЧ), которая состоит из схемы горизонтальной развертки (СГР) и электронно-лучевой трубки (ЭЛТ). При использовании в качестве индикатора ЭЛТ напряжение с выхода СУП запускает горизонтальную частотную развертку ЭЛТ. После детектирования сигнала с выхода Ф2 в амплитудном детекторе (АД) и усиления продетектированного сигнала в видеоусилителе (ВУ) он поступает на вертикальные отклоняющие пластины ЭЛТ. В результате на экране индикатора мы наблюдаем принятый сигнал и по его положению на частотной развертке определяем несущую частоту сигнала.
В качестве устройства измерения частоты может использоваться счетчик масштабных импульсов. В этом случае СУП запускает генератор масштабных импульсов (ГМИ), которые поступают к схеме счета импульсов (ССИ). Счет прекращается в момент поступления на ССИ сигнала с выхода ВУ. Показания счетчика будут пропорциональны частоте настройки фильтра, следовательно, соответствовать частоте принятого сигнала.
Супергетеродинный приемник состоит из усилителя радиочастоты (УРЧ) с входным фильтром, смесителя (СМ) с гетеродином (Г), усилителя промежуточной частоты (УПЧ), амплитудного детектора (АД), видеоусилителя (ВУ) и схемы измерения частоты (СИЧ), аналогичной приемнику прямого усиления (рис. 9).

Рис.9 — Поисковый приемник супергетеродинного типа.
Смеситель с гетеродином образуют преобразователь частоты, который осуществляет перенос спектра радиосигнала с частотой fc на постоянную для данного приемника частоту f пр = | fc ± f г | . Спектр сигнала переносится в полосу пропускания УПЧ.
Настройка приемника на заданную частоту fc производится путем настройки гетеродина на частоту f г = f c ± f np .
Основное усиление и избирательность полезного сигнала осуществляются УПЧ. К достоинствам супергетеродинного приемника относятся высокая избирательность и чувствительность. К недостаткам — сложность и наличие, кроме основного, побочных каналов приема (зеркальный канал, канал на f пр). Избирательность по зеркальному каналу улучшается путем использования настраиваемого входного фильтра Ф и УРЧ (преселекторов). Для уменьшения влияния помех на fnp используют заградительные фильтры.
Одной из задач, которые решают при ведении РР и РТР является определение местоположения (МП) источника электромагнитного излучения на плоскости или в пространстве.
Местоположение источников ЭМИ на плоскости определяется с помощью линий положения, а в пространстве — поверхностей положения.
Линией (поверхностью) положения называют геометрическое место точек, для которого геометрическая величина, определяющая возможное положение объекта (источника ЭМИ), имеет постоянное значение.
При реализации различных способов определения МП наиболее часто в качестве таких линий используются линии пеленга, а геометрической постоянной является угол между этой линией и направлением отсчёта. Линия пеленга это прямая, соединяющая средство разведки и источник ЭМИ.
В практике РРТР находят применение различные способы пеленгации. Причём, наиболее широко используются амплитудные и фазовые методы. Поэтому задачей настоящей лекции является рассмотрение сущности этих методов.
Источник



