
- Сравнение методов активного бесконтактного измерения расстояния
- CSS (ISO 24730-5) Измерение расстояний без рулетки и проводов
- Структура системы позиционирования РТЛС
- Работа системы
- Технология измерения расстояний: Chirp Spread Spectrum (CSS)
- Как это работает
- Ультразвуковой датчик расстояния. Принцип работы и устройство. Получение информации. Инфракрасный датчик расстояния. Датчик линии
Сравнение методов активного бесконтактного измерения расстояния
Активное бесконтактное измерение расстояния может быть реализовано акустическими методами сверхзвуковым излучением, электромагнитными волнами радио частоты или оптически световым излучением. Во всех методах сигнал посылается к цели, и расстояние вычисляется, основываясь на параметрах отраженного сигнала.
Дальномеры, использующие звуковые волны работают в сверхзвуковом диапазоне частот (от 20 кГц до нескольких МГц). Преимуществами сверхзвуковых методов являются относительно низкие частоты, которые легко обрабатывать электроникой, простая и дешевая структура устройства, а также возможность измерять расстояние до металлических, зеркальных и стеклянных поверхностей, которые представляют трудности для оптических дальномеров. Основным недостатком является большое отклонение луча (ширина достигает десятков градусов), небольшая скорость, множественные отражения и сильное затухание на больших расстояниях. Ультразвуковые методы находят  наибольшее применение на коротких расстояниях (не превышающих 100 м) и в случаях, когда в воздухе большое количество пыли или других частиц.
наибольшее применение на коротких расстояниях (не превышающих 100 м) и в случаях, когда в воздухе большое количество пыли или других частиц.
Электромагнитные волны используются с 1930-х годов в традиционных радарах. Радары используют частоты от десяток МГц до 100 ГГц. Разрешение при измерении углов и расстояний обычно хуже, чем в оптических методах. Для измерения больших расстояний требуется большая мощность излучаемого импульса, что затрудняет их использование в переносных устройствах с автономным источником питания.
Оптические методы измерения расстояния могут быть разделены несколькими способами, одним из которых является классификация на активные и пассивные методы. Пассивные методы не требуют собственного источника света, а используют окружающий свет для сбора информации о расстоянии от цели. Активные методы имеют источник излучения для подсвечивания цели. Самыми важными активными методами являются интерференционные методы, геометрические методы (триангуляция) и измерение пролетного времени. Другая классификация разделяет методы на прямые, измеряющие расстояние до какой-то точки цели и методы, вычисляющие расстояние до цели по некоторому алгоритму, учитывающему тени и относительное положение отдельных частей цели.
При использовании оптических методов цели также могут быть разделены на активные и пассивные. Пассивные цели могут иметь большие вариации коэффициента отражения. Отражение может также сильно изменяться как функция угла измерения – от Ламбертовской поверхности (с одинаковым отражением во всех направлениях) до зеркальной отражающей поверхности. Цель будет активной, когда некоторый отражатель (угловая призма или отражающая пленка) присоединен к ней[10].
Нам важно ваше мнение! Был ли полезен опубликованный материал? Да | Нет
Источник
CSS (ISO 24730-5) Измерение расстояний без рулетки и проводов
В одном из предыдущих топиков я рассказал о первой российской системе позиционирования в режиме реального времени. Этот топик для тех, кто заинтересовался, «как это работает». Начну с измерения расстояния радиочастотным методом.
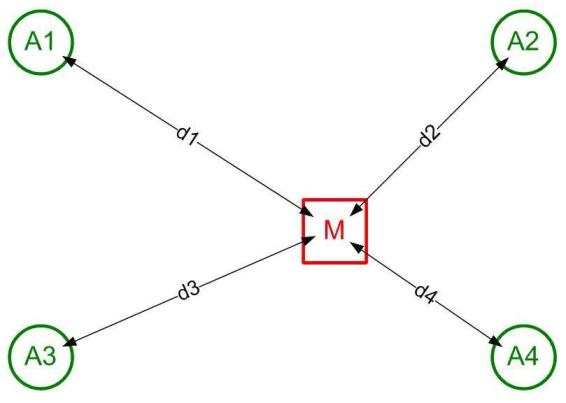
Для определения местоположения меток на плане ООО «РТЛС» применяет метод расчета местонахождения каждой метки, исходя из измеренных меткой (М) расстояний до трех или более анкеров (А), имеющих известное положение в пространстве, как на рисунке.
Для измерения расстояний используется две технологии, а именно:
CSS (Chirp Spread Spectrum) – использование коротких ЛЧМ импульсов и
SDS-TWR (Symmetrical Double-Sided Two Way Ranging) – симметричное двухстороннее двунаправленное измерение расстояния.
Технологии основаны на измерении времени распространения радиосигнала от передатчика до приемника (time of flight) и соответствуют международным стандартам ISO 24730-5 и IEEE 802.15.4-2011 соответственно.
Этот топик посвящен технологии CSS.
Технология CSS в том виде, как она применена ООО «РТЛС», отличается:
1) оптимальной для большинства промышленных приложений точностью измерения (погрешность один метр на расстоянии до 30 метров с достоверностью 90%) внутри помещений;
2) высокой помехоустойчивостью;
3) устойчивостью к многолучевому затуханию;
4) минимальным энергопотреблением метки (для повышения продолжительности работы батарей без подзарядки);
5) минимальной стоимостью.
Структура системы позиционирования РТЛС
Структурная схема показана на рисунке.
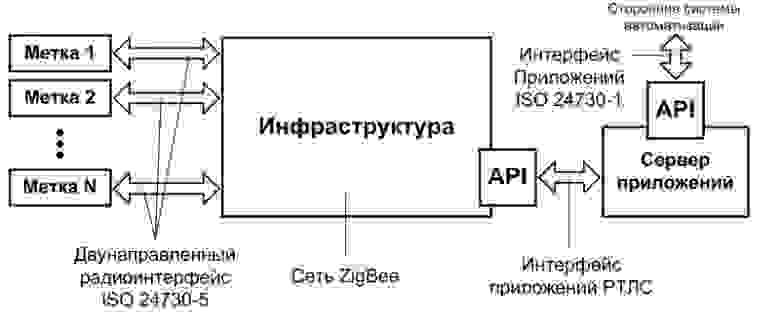
Измерение расстояний в системе осуществляют метки, которые обмениваются пакетами с элементами инфраструктуры через двунаправленный радио интерфейс, соответствующий стандарту ISO 24730-5. Инфраструктура через программный интерфейс приложений (API приложений РТЛС) связана с сервером для управления инфраструктурой, метками и процессом измерений, а также для получения результатов измерения и информации о состоянии меток. Инфраструктура в системе РТЛС составлена из зон беспроводной ячеистой сети ZigBee (IEEE 802.15.4), связанных с сервером IP каналами. Каждая базовая станция ZigBee сети имеет дополнительный радио интерфейс для связи с метками. (Инфраструктуре РТЛС будет посвящен один из следующих топиков).
Сервер, в свою очередь, имеет внешний стандартный API, который позволяет передавать полученные системой данные в другие автоматизированные системы.
В системе РТЛС метки не входят в состав сети, не участвуют в маршрутизации и трансляции данных, то есть, освобождены от всего кроме измерения расстояний и передачи результатов измерения через транспортную сеть на сервер. Это позволило упростить метки и снизить их энергопотребление и цену.
Метки взаимодействуют с инфраструктурой через показанный на рисунке двунаправленный радио интерфейс.
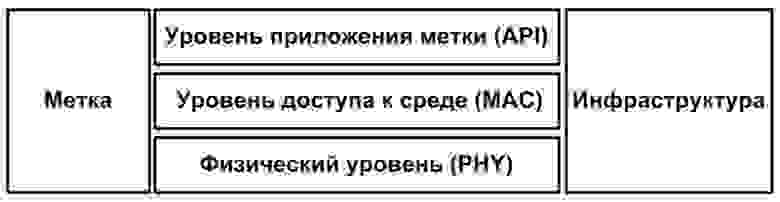
Для этого интерфейса стандартом ISO 24730-5 определены частотный диапазон, форма радиосигнала, модуляция, кодирование, форматы пакетов, команды и другие параметры. Стек протоколов интерфейса включает:
PHY – физический уровень, который определяет параметры среды передачи (рабочая частота, ширина канала и т.д.);
МАС – уровень доступа к среде, который определяет параметры кодирования, формат пакетов и тому подобное;
API – уровень приложения, который определяет состояния метки и порядок их изменения, перечень команд и их параметров, протоколы обмена пакетами с элементами инфраструктуры и так далее.
Работа системы
В момент включения состояние метки – исходное, используется «профиль по умолчанию». Метка периодически рассылает короткие широковещательные пакеты – блинки. Каждый блинк содержит физический адрес метки, ее состояние и информацию о времени, когда метка будет готова принимать команды со стороны инфраструктуры.
Инфраструктура соответствующими командами указывает метке, с какими анкерами и с какой периодичностью проводить измерение расстояний, количество сеансов измерения и адрес для передачи результатов. Поведение меток изменяется передачей соответствующих команд путем изменения состояния меток и задания режимов и параметров измерений.
Если метка не получает в определенное время очередную команду, она переходит в исходное состояние (к использованию «профиля по умолчанию») и периодически рассылает блинки для восстановления связи. Более подробно о состояниях метки, командах управления и можно прочитать в приложении к статье на сайте РТЛС www.rtlsnet.ru/technology/view/2.
Технология измерения расстояний: Chirp Spread Spectrum (CSS)
В технологии CSS используются «chirp» импульсы (в дословном переводе chirp означает чириканье, а говоря по-русски, CSS – лнейно-частотная модуляция – ЛЧМ). Chirp импульсы – импульсы монотонно увеличивающейся или уменьшающейся частоты. Нижняя и верхняя частота chirp импульса соответствуют границам определенного стандартом частотного диапазона.
В природе дельфины и летучие мыши миллионы лет измеряют расстояния, используя Chirp импульсы. В радиолокации chirp импульсы впервые применены и запатентованы профессором Гуттманом в 1940 году. Фирма Canon в середине 1990-х запатентовала использование chirp импульсов в волоконно-оптических системах. А в 1996 года Nanotron Technologies начала исследования и впоследствии запатентовала CSS для беспроводной передачи данных.
CSS – радиочастотная технология, наилучшим образом подходит для случаев, когда особенно важны надежность связи и низкое энергопотребление для устройств с батарейным питанием (battery–powered). Скорость передачи данных по технологии CSS – средняя (до 2 Мб/с).
Как это работает
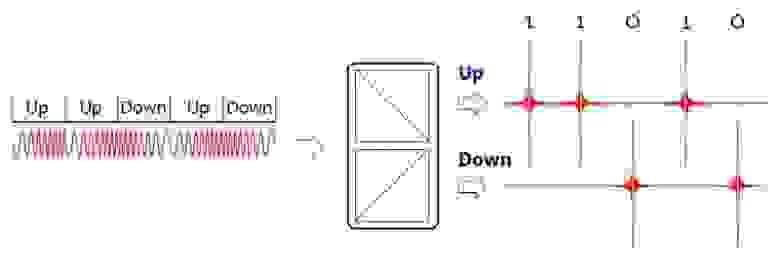
Любой пакет CSS передается Chirp импульсами двух видов: с нарастающей (Upchirp) или с уменьшающейся (Downchirp) частотой, как показано на рисунках.
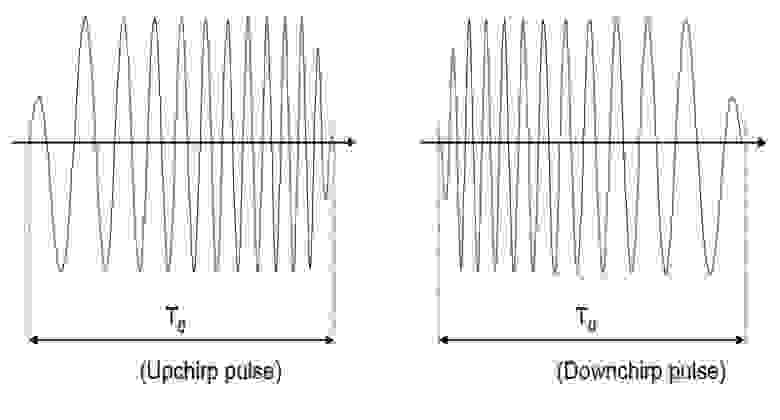

Стандарт ISO 24730-5 устанавливает для CSS центральную частоту 2,45 ГГц, ширину полосы 80 МГц и фиксированную длительность импульса – 1 мкс.
В CSS технологии передача информации осуществляется кодированной последовательностью Chirp импульсов. Символу «1» соответствует Upchirp импульс, символу «0» – Downchirp импульс. Декодирование последовательности осуществляется двумя комплементарными (дополняющими друг друга) дисперсионными линиями задержки (ДЛЗ). Кодированная последовательность подается на входы обеих линий, но параметры ДЛЗ подбираются так, чтобы сигналы разной частоты проходили через ДЛЗ с различной скоростью. В одной ДЛЗ (на рисунке – Up) высокие частоты распространяются через линию задержки быстрее, во второй быстрее походят низких частот. В результате Upchirp импульс, который начинается с низких и заканчивается высокими частотами, проходя через ДЛЗ Up «сжимается» во времени. Высокочастотный конец «догоняет» низкочастотное начало и первоначально равномерно распределенная во времени энергия импульса на выходе проявляется в коротком импульсе, амплитуда которого оказывается во много раз больше, чем амплитуда входного сигнала. Напротив, Downchirp импульс, проходя через ДЛЗ Up, «размывается» во времени и его амплитуда падает. Таким образом, на выходе ДЛЗ Up появляются импульсы, которые соответствуют символу «1». Во второй ДЛЗ (на рисунке Down) быстрее распространяются низкие частоты, благодаря чему «сжимаются» Downchirp импульсы, а на выходе ДЛЗ появляются импульсы, которые соответствуют символу «0».
Помимо декодирования ДЛЗ повышают устойчивость к помехам, а также к широкополосному шуму. Суть в том, что помехи (шум), в отличие от chirp импульсов, имеют неизменный частотный спектр и проходят через ДЛЗ без изменений. «Сжатые» в ДЛЗ chirp импульсы имеют большую по сравнению с исходной амплитуду, и легко выделяются на фоне шума и помех.
Еще одно преимущество CSS – устойчивость к многолучевому затуханию. Сигнал передатчика в диапазоне 2,4 ГГц обычно достигает приемника в «сопровождении» нескольких эхосигналов – отражений от препятствий, либо даже только в виде эхосигналов при отсутствии прямой видимости. Пути распространения сигналов имеют различную длину, поэтому отражения сдвинуты по фазе относительно основного сигнала. В узкополосных системах это приводит к нарушению связи. CSS отличается тем, что искаженные и сдвинутые по фазе сигналы в целом сохраняют частотный спектр, что позволяет собрать на ДЛЗ практически всю энергию, распределенную в 80 мегагерцовой полосе исходного сигнала.
Источник
Ультразвуковой датчик расстояния. Принцип работы и устройство. Получение информации. Инфракрасный датчик расстояния. Датчик линии
Принцип работы датчика схож с ориентацией в пространстве летучих мышей. У него есть своего рода динамик и микрофон. При помощи динамика он посылает ультразвуковые импульсы, чтобы, вернувшись обратно к датчику, замерить длину до отражаемого объекта.
Отличие этого ультразвукового датчика от аналогичных — высокая точность измерения. У датчика есть три ножки, при помощи которых происходит подключение к данной модели. Если считать слева направо, то первая ножка — это земля, вторая — питание, третья — сигнал.
1. переводить цифровой порт в режим записи
2. кратковременно посылать звуковой импульс
3. перевести цифровой порт в режим чтения, чтобы прослушать
1. Открываем LabVIEW.
2. Делаем New VI.
3. Правой кнопкой мыши вызываем функциональное меню.
4. Используем While loop — это цикл; используем Flat Sequence Structure — это структура, служит для правильного указания очереди.
5. FPJ IO оставляем на закрепке.
6. Подключаем myRIO в коннектор А, в порт DIO-0.

8. Достаем IO Node и продолжаем последовательно подключать.
9. Меняем режим IO Node выхода.
10. Создаем промежуток задержки перед тем, как посылать этот звуковой импульс.
11. Генерируем сигнал.
12. Выключаем подачу сигнала.
- достаем IO Method
- подключаем его
- выбираем Set Output Enable
- добавляем константу
- ставим False
Нам нужно создать механизм, который будет отслеживать возвращения нашего звука. После того, как мы подали импульс, нам нужно начать отсчитывать время, иначе говоря — задержку. Реализуем это через циклы.
Первый цикл будет служить стартом отсчета времени, а второй — отсчитывать тот промежуток времени, в который возвращается наш звуковой сигнал.
1. Добавляем IO Node.
2. Включаем.
3. Организуем задержку.
- ставим логическую операцию «нет»
- добавляем индикатор, который будет служить показателем нашей дистанции
- добавляем False на цикл
- запускаем нашу программу на компиляцию
1. Обеспечивает бесконтактное измерение расстояния от 2 см до 40 и от 10 до 80
2. Работает от 5 Вольт
3. Передает информацию о дистанции посредством аналоговой связи
4. Имеет специальный инфракрасный объектив (1), который принимает отраженный инфракрасный луч на специальную ПЗС-матрицу
5. На основе данных ПЗС-матрицы определяет угол отражения (альфа), который затем используется для расчета дальности
6. Значение дальности подается на аналоговый выход сенсора, на котором может быть считан нашим микроконтроллером
Источник



