
- Способы описания движения. Траектория. Путь. Перемещение
- Урок 2. Физика 10 класс ФГОС
- В данный момент вы не можете посмотреть или раздать видеоурок ученикам
- Получите невероятные возможности
- Конспект урока «Способы описания движения. Траектория. Путь. Перемещение»
- Координатный способ задания движения точки
- Введение
- Определение кинематических величин
- Пример решения задачи
- Определение скорости и ускорения точки по заданным уравнениям ее движения
- Решение
- Определение вида траектории
- Определение скорости точки
- Определение ускорения точки
- Определение остальных величин
Способы описания движения. Траектория. Путь. Перемещение
Урок 2. Физика 10 класс ФГОС


В данный момент вы не можете посмотреть или раздать видеоурок ученикам
Чтобы получить доступ к этому и другим видеоурокам комплекта, вам нужно добавить его в личный кабинет, приобрев в каталоге.
Получите невероятные возможности

Конспект урока «Способы описания движения. Траектория. Путь. Перемещение»
На прошлом уроке мы с вами говорили о механическом движении. Давайте вспомним, что механическим движением называется изменение положения тела или частей тела в пространстве относительно других тел с течением времени.
Теперь давайте вспомним, как рассчитывается положение точки в любой момент времени относительно выбранной системы отсчёта. Это можно сделать несколькими способами. Но мы пока рассмотри два — наиболее часто применяющиеся.
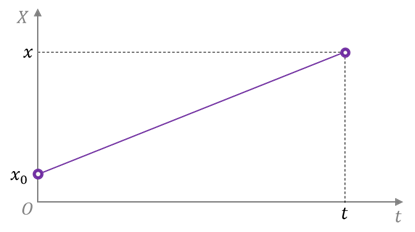
Первый способ — координатный. Очевидно, что при движении точки в выбранной системе отсчёта её координаты с течением времени изменяются. То есть они зависят от времени или, говорят, являются функциями времени:

Эти уравнения называются кинематическими уравнениями движения точки, записанными в координатной форме.
Если уравнения движения известны, то мы можем рассчитать координаты точки для любого момента времени, а следовательно, и её положение относительно выбранного тела отсчёта.
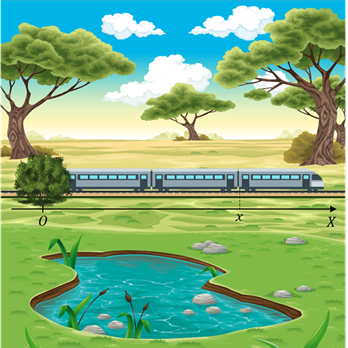
В зависимости от характера движения, положение точки может быть определено одной, двумя или тремя координатами. Так, например, для описания движения поезда нам достаточно связать с телом отсчёта систему координат, состоящую из одной координатной оси.
Однако при изучении движения тела на плоскости её уже будет недостаточно. В этом случае нам необходимо использовать систему координат с двумя взаимно перпендикулярными осями.

Соответственно, при рассмотрении движения тела в пространстве с телом отсчёта связывается система координат, состоящая из трёх взаимно перпендикулярных координатных осей.
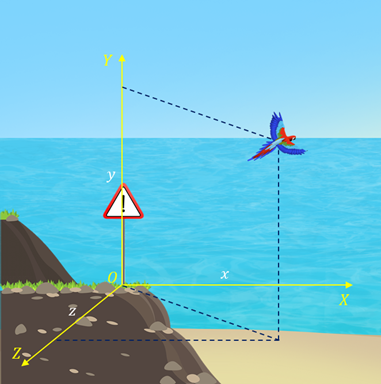
Второй способ описания движения — векторный. В нём положение точки задаётся при помощи радиус-вектора.
Радиус-вектор — это направленный отрезок, проведённый из начала координат в данную точку.
При движении материальной точки радиус-вектор, как и координаты, является функцией времени, так как он изменяет свою длину и поворачивается:

Записанное уравнение является уравнением движения точки, записанным в векторном виде. Если оно известно, то мы можем для любого момента времени рассчитать радиус-вектор точки, а значит, определить её положение.
Таким образом, задание трёх скалярных уравнений равносильно заданию одного векторного уравнения.
Однако при решении большинства задач используется понятие не вектора, а его проекции на ось координат.
Согласно определению, проекция вектора на ось — это длина отрезка между проекциями начала и конца вектора на эту ось, взятая со знаком «плюс» или «минус».
Обозначать проекцию вектора будем той же буквой, что и вектор, но без стрелки над ней и с индексом внизу, указывающим, на какую ось проецируется вектор:
Давайте условимся, что проекцию вектора на ось мы будем брать со знаком «плюс», если направление вектора совпадает с направлением координатной оси́, на которую он проецируется. При этом обратите внимание: угол между вектором и координатной осью является острым. Соответственно, если направление вектора и координатной оси́ не совпадают, то проекцию вектора на эту ось будем брать со знаком «минус». Как видно из рисунка, в этом случае угол между вектором и осью координат является тупым.
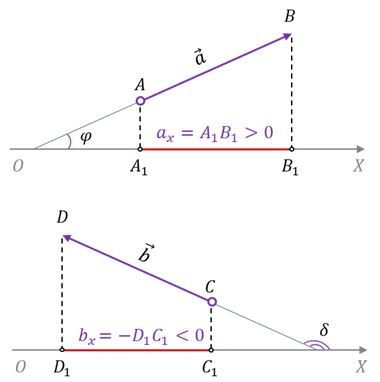
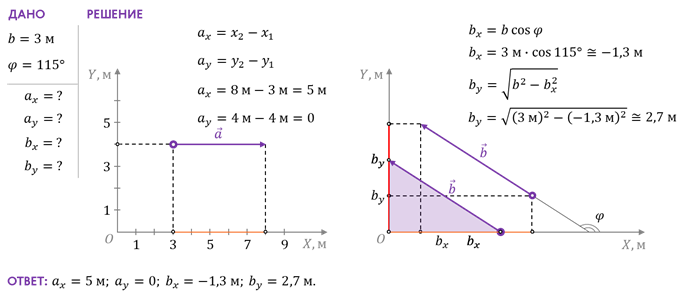
Для примера давайте определим проекции векторов а и b, представленных на рисунке. Модуль вектора b равен 3 м, а сам вектор направлен под углом 115 о к оси Х.
Так же положение точки через некоторый промежуток времени можно определить, зная траекторию её движения, начальное положение точки на этой траектории и путь, пройденный точкой за этот промежуток времени. Давайте с вами вспомним, что траекторией называется воображаемая линия, по которой движется точка в пространстве. А путь — это длина траектории, которую описала точка за время своего движения.
В зависимости от формы траектории любые движения точки можно разделить на прямолинейные и криволинейные. Здесь всё просто. Если траекторией является прямая линия, то движение прямолинейное, если кривая — криволинейное.
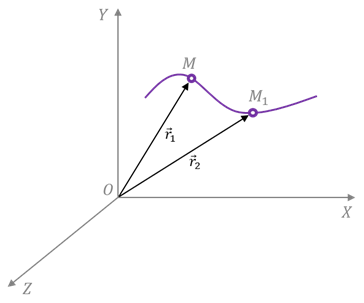
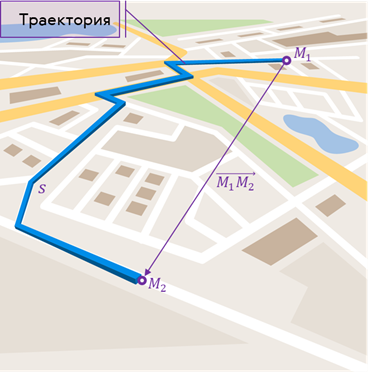
Однако, в случае, когда траектория движения точки неизвестна, её положение в некоторый момент времени определить невозможно. Например, пусть в некоторый момент времени наша материальная точка занимает в пространстве некоторое положение М1. Вопрос: где окажется точка спустя некоторый промежуток времени после этого момента? Очевидно, что ответов на этот вопрос бесконечное множество, даже если знать, какой путь успела она пройти за этот промежуток времени. Следовательно, для ответа на этот вопрос нам необходимо знать ещё и направление, в котором двигалась точка, то есть знать её вектор перемещения или просто перемещение.
Перемещением называется вектор, проведённый из начального положения точки в её конечное положение.
При векторном способе задания движения перемещение можно рассматривать как изменение радиус-вектора движущейся точки. Покажем это. Пусть в некоторый момент времени t1 положение точки задаётся радиус вектором  . Соответственно, в момент времени t2 — радиус-вектором
. Соответственно, в момент времени t2 — радиус-вектором  . Тогда, чтобы найти изменение радиус вектора за промежуток времени (t2 – t1), нужно из конечного вектора вычесть вектор начальный.
. Тогда, чтобы найти изменение радиус вектора за промежуток времени (t2 – t1), нужно из конечного вектора вычесть вектор начальный.
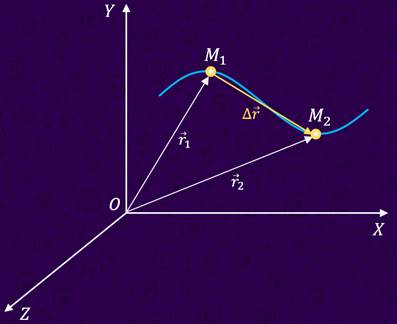
Из полученного рисунка видно, что перемещение, совершенное точкой за промежуток времени Δt, есть изменение её радиус-вектора за это время:
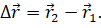
Теперь напомним важную деталь: путь, пройденный телом, нельзя сравнивать с его перемещением. Ведь путь — это величина скалярная, а перемещение — векторная. Поэтому сравнивать путь можно только с модулем перемещения. При этом следует помнить, что путь может быть равен модулю перемещения только в случае прямолинейного однонаправленного движения. Во всех остальных случаях путь всегда больше модуля перемещения.
Для примера решим такую задачу. Мальчик на роликах пересёк прямоугольную площадку по диагонали AB, а второй мальчик прошёл пешком из точки A в точку B по краю площадки. Определите модули перемещений обоих мальчиков и пути, пройденные ими, если размеры площадки 60 х 80 м.
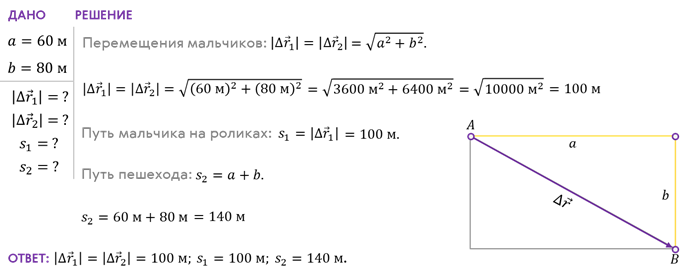
В заключении урока рассмотрим опыт, описанный ещё в книге Галилея «Диалог о двух системах мира». Итак, у нас есть корабль, движущийся по реке, и два наблюдателя: на корабле и на берегу реки. С вершины мачты на палубу падает ядро. Для наблюдателя, находящегося на палубе, траекторией движения ядра является прямая линия. А путь и модуль перемещения ядра будут равны.

Однако с точки зрения наблюдателя, находящегося на берегу, ядро будет двигаться по ветке параболы, так как оно имеет некоторую начальную горизонтальную скорость, равную скорости корабля. Поэтому для него на берегу ядро будет двигаться по криволинейной траектории. А модуль его перемещения не будет равен пройденному пути.
Этот простой и очень наглядный пример говорит нам о том, что форма траектории, путь и перемещение тела зависят от выбора системы отсчёта.
Источник
Координатный способ задания движения точки
Введение
Выводы приведенных ниже формул и изложение теории приводится на странице “Кинематика материальной точки”. Здесь мы применим основные результаты этой теории к координатному способу задания движения материальной точки.
Пусть мы имеем неподвижную прямоугольную систему координат с центром в неподвижной точке . При этом положение точки M однозначно определяются ее координатами (x, y, z). Координатный способ задания движения точки – это такой способ, при котором заданы зависимости координат от времени. То есть заданы три функции от времени (при трехмерном движении):
Далее мы приводим формулы вычисления кинематических величин и пример решения задачи для координатного способа задания движения.
Определение кинематических величин
Зная зависимости координат от времени , мы автоматически определяем радиус-вектор материальной точки M по формуле:
,
где – единичные векторы (орты) в направлении осей x, y, z .
Дифференцируя по времени , находим проекции скорости и ускорения на оси координат:
;
;
Модули скорости и ускорения:
;
.
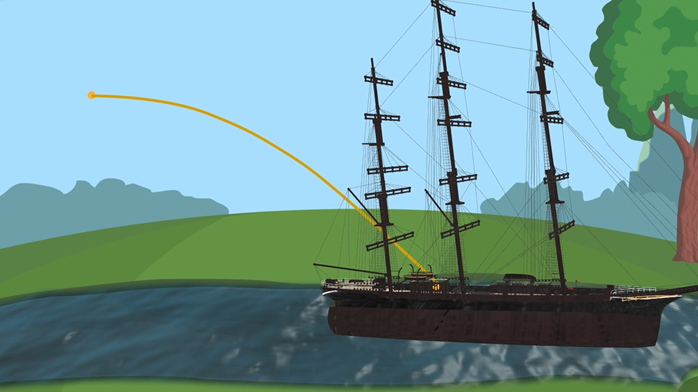
Единичный вектор в направлении касательной к траектории:
.
Его можно определить двумя способами – по направлению скорости, или в противоположную сторону. Поэтому здесь в знаменателе стоит не модуль скорости, а алгебраическая величина скорости, которая, по абсолютной величине, равна модулю скорости, но может принимать как положительные, так и отрицательные значения: . Она является проекцией скорости на направление единичного вектора .
Алгебраическая величина тангенциального (касательного) ускорения – это проекция полного ускорения на направление единичного вектора касательной к траектории:
.
Вектор тангенциального (касательного) ускорения:
.
Здесь также, как и для скорости, – это скалярная величина, которая может принимать как положительные так и отрицательные значения: .
Нормальное ускорение:
.
Вектор нормального ускорения:
; .
Единичный вектор в направлении главной нормали траектории (то есть единичный вектор, перпендикулярный касательной и направленный к центру кривизны траектории):
.
Здесь – это модуль нормального ускорения: . Нормальное ускорение всегда направлено к центру кривизны траектории. Оно не может быть направлено в противоположную сторону.
Радиус кривизны траектории:
.
Центр кривизны траектории:
.
Единичный вектор в направлении бинормали:
.
Пример решения задачи
Определение скорости и ускорения точки по заданным уравнениям ее движения
По заданным уравнениям движения точки установить вид ее траектории и для момента времени найти положение точки на траектории, ее скорость, полное, касательное и нормальное ускорения, а также радиус кривизны траектории.
Уравнения движения точки:
, см;
, см.
Решение
Определение вида траектории
Исключаем время из уравнений движения. Для этого перепишем их в виде:
; .
Применим формулу:
.
;
;
;
.
Итак, мы получили уравнение траектории:
.
Это уравнение параболы с вершиной в точке и осью симметрии .
Поскольку
, то
; или
.
Аналогичным образом получаем ограничение для координаты :
;
;
Таким образом, траекторией движения точки является дуга параболы
,
расположенная при
и .
Строим параболу по точкам.
| 0 | 6 |
| ± 3 | 5,625 |
| ± 6 | 4,5 |
| ± 9 | 2,625 |
| ± 12 | 0 |
Определяем положение точки в момент времени .
;
.
Определение скорости точки
Дифференцируя координаты и по времени , находим компоненты скорости.
.
Чтобы продифференцировать , удобно применить формулу тригонометрии:
. Тогда
;
.
Вычисляем значения компонент скорости в момент времени :
;
.
Модуль скорости:
.
Определение ускорения точки
Дифференцируя компоненты скорости и по времени , находим компоненты ускорения точки.
;
.
Вычисляем значения компонент ускорения в момент времени :
;
.
Модуль ускорения:
.
Алгебраическая величина тангенциального ускорения – это проекция полного ускорения на направление единичного вектора касательной к траектории. Выберем направление совпадающим с направлением скорости . Тогда ; алгебраическая величина тангенциального ускорения – это проекция полного ускорения на направление скорости :
.
Поскольку , то вектор тангенциального ускорения направлен противоположно скорости .
Нормальное ускорение:
.
Вектор и направлен в сторону центра кривизны траектории.
Радиус кривизны траектории:
.
Траекторией движения точки является дуга параболы
; .
Скорость точки: .
Ускорение точки: ; ; .
Радиус кривизны траектории: .
Определение остальных величин
При решении задачи мы нашли:
вектор и модуль скорости:
; ;
вектор и модуль полного ускорения:
; ;
тангенциальное и нормальное ускорения:
; ;
радиус кривизны траектории: .
Определим остальные величины.
Единичный вектор в направлении касательной к траектории:
.
Вектор тангенциального ускорения:
.
Вектор нормального ускорения:
.
Единичный вектор в направлении главной нормали:
.
Координаты центра кривизны траектории:
.
Введем третью ось системы координат перпендикулярно осям и . В трехмерной системе
; .
Единичный вектор в направлении бинормали:
.
Автор: Олег Одинцов . Опубликовано: 22-02-2016 Изменено: 29-01-2020
Источник



