
Способ вращения вокруг проецирующих осей
Контрольные задания по теме: Рабочая тетрадь задача 50
Трудоемкость и точность графического решения задач часто зависит не только от сложности задач, но и от того, какое положение занимают геометрические фигуры по отношению к плоскостям проекций. Наиболее выгодными являются положения, параллельные плоскостям проекций или перпендикулярные им.
Переход от общего положения геометрической фигуры к частному можно осуществить двумя путями:
а) перемещением в пространстве проецируемой фигуры так, чтобы она заняла частное положение относительно плоскостей проекций, которые при этом не меняют своего положения;
б) выбором новой плоскости проекций, по отношению к которой фигура, не имеющая своего положения в пространстве, окажется в частном положении. Первый путь лежит в основе способа плоскопараллельного перемещения, а второй — в основе способа замены плоскостей проекций.
Существует несколько способов плоскопараллельного перемещения:
1. Способ параллельного перемещения. При этом плоскости, по которым двигаются точки фигуры, параллельны плоскости проекций. Траектория — произвольная плоская линия;
2. Способ вращения вокруг оси, перпендикулярной к плоскости проекций. Траектории перемещаемых точек — дуги окружностей, центры которых находятся на оси вращения;
3. Способ вращения вокруг оси параллельной плоскости проекций (вокруг линии уровня).
Это частный случай параллельного перемещения. За траекторию движения точки принимается не произвольная линия, а дуга окружности, центр которой находится на оси вращения, а радиус равен расстоянию между осью вращения и данной точкой.
При вращении точки вокруг оси перпендикулярной, П 2 , фронтальная проекция точки перемещается по окружности, а горизонтальная — по прямой, перпендикулярной оси вращения. Если же точка вращается вокруг оси, перпендикулярной П 1 , то в горизонтальной плоскости траекторией ее движения будет окружность, а во фронтальной – прямая, перпендикулярная оси вращения. На рисунке 32 показано построение новых проекций точек при помощи способа вращения. На рисунке 32 а – вращение вокруг фронтально-проецирующей оси, на рисунке 32 б – вокруг горизонтально-проецирующей оси.
Рисунок 32
Этим способом удобно находить натуральные величины отрезков и фигур, занимающих проецирующее положение.
На рисунке 33 показан пример определения натуральной величины треугольника АВС, плоскость которого перпендикулярна П 2 . За ось вращения необходимо взять фронтально-проецирующую прямую, проходящую через точку, принадлежащую этой плоскости. В данном случае выбрана точка А — вершина треугольника. Плоскость треугольника вращается во фронтальной плоскости вокруг оси до положения, параллельного горизонтальной плоскости. Во фронтальной плоскости точки С и В перемещаются по окружностям, радиус которых равен расстоянию от оси вращения до фронтальных проекций точек. В горизонтальной плоскости траектории движения точек – прямые, перпендикулярные оси. Полученная проекция треугольника А´В´С´, является его натуральной величиной.
Рисунок 33
Способ вращения наиболее часто применяется при определении натуральных величин сечений поверхностей плоскостями частного положения.
Сущность этого способа состоит в том, что положение фигуры в пространстве не меняется, а вводится новая система плоскостей проекций. Новая плоскость проекции выбирается перпендикулярно к одной из старых. При этом, проецируемая фигура по отношению к новой плоскости занимает частное положение, обеспечивая наиболее удобное решение задачи. Если замена одной плоскости не обеспечивает требуемый результат, то новую плоскость заменяют еще раз.
На рисунке 34 показано построение проекции точки А в новой системе плоскостей проекций при замене плоскости П 1 на П 4 . Плоскость П 4 перпендикулярна П 2 . Проекция точки А1 заменяется на А 4 . По линии связи откладывается расстояние от заменяемой проекции точки до новой оси.
Рисунок 34
На рисунке 35 дан пример определения натуральной величины отрезка общего положения. Новая плоскость П 4 выбирается параллельно одной из проекций отрезка. При этом проекция отрезка на эту плоскость будет являться его натуральной величиной.
Рисунок 35
В некоторых случаях требуется замена двух плоскостей проекции. Например, при определении расстояния от точки до прямой. При этом прямую необходимо спроецировать в точку. На рисунке 36 отрезок общего положения переведен в проецирующее положение по отношению к плоскости П5.
Рисунок 36
1. Назовите, какие вы знаете способы преобразования чертежа. Для чего они применяются?
2. Какие задачи можно решать при помощи способа вращения вокруг проецирующей оси?
3. По каким линиям перемещаются проекции точки при вращении вокруг горизонтально проецирующей оси?
4. Можно ли определить натуральную величину фигуры общего положения способом вращения вокруг проецирующей оси?
5. В чем суть способа замены плоскостей проекций?
6. Как построить проекцию точки в новой системе плоскостей проекций? Этапы построения.
7. Сколько замен нужно осуществить, чтобы перевести отрезок общего положения в проецирующее положение?
8. Как нужно выбрать новую плоскость, для того, чтобы сделать плоскость общего положения проецирующей?
© ФГБОУ ВПО Красноярский государственный аграрный университет
Источник
Метод вращения вокруг оси
Одним из наиболее эффективных методов определения метрических характеристик плоских фигур является вращение вокруг оси, в качестве которой обычно используют линию уровня или проецирующую прямую.
Способ вращения вокруг проецирующей прямой
Перемещение точки при её вращении вокруг проецирующей прямой является частным случаем параллельного перемещения и подчиняется следующим правилам.
- Траектория движения точки – дуга окружности с центром, расположенным на оси вращения. Радиус окружности равен расстоянию между точкой и осью вращения.
- При вращении точки вокруг прямой, перпендикулярной фронтальной плоскости проекции, фронтальная проекция точки перемещается по дуге окружности, а горизонтальная – параллельно оси X.
- При вращении точки вокруг прямой, перпендикулярной горизонтальной плоскости проекции, горизонтальная проекция точки перемещается по дуге окружности, а фронтальная – параллельно оси X.
Руководствуясь рассмотренными правилами, повернем отрезок CD в положение, параллельное фронтальной плоскости проекции. В качестве оси вращения i будем использовать горизонтально проецирующую прямую, проведенную через точку D.

При повороте отрезка положение точки D не изменится, поскольку она лежит на оси i. Точку C’ переместим по дуге окружности радиусом C’D’ в положение C’1 так, чтобы выполнялось условие C’1D’1 || X. Для нахождения точки C»1 из C» проведем прямую, параллельную оси X, до пересечения её с линией связи, восстановленной из т. C’1.
На следующем рисунке показан способ перевода отрезка в горизонтально проецирующее положение. Построения выполнены в два этапа и описаны ниже.

Сначала вращением вокруг оси i1 CD перемещают в положение C1D1, параллельное фронтальной плоскости проекции. После этого вращением вокруг оси i2 отрезок переводится в искомое положение C2D2, где он перпендикулярен горизонтальной плоскости проекции.
Расположение осей вращения выбирают исходя из удобства дальнейших построений. В нашей задаче горизонтально проецирующая прямая i1 проходит через точку D, а проекция i»2 фронтально проецирующей прямой i2 лежит на продолжении отрезка C»1D»1.
Способ вращения вокруг линии уровня
Действенным и наиболее рациональным приемом решения задач, в которых требуется определить натуральную величину угла, является способ вращения вокруг линии уровня.
Основные правила построения
- Радиус вращения точки равен расстоянию между точкой и линией уровня, выполняющей роль оси. Натуральную величину радиуса определяют методом прямоугольного треугольника.
- При вращении вокруг горизонтали h точка перемещается по окружности, которая проецируется на горизонтальную плоскость в отрезок прямой, перпендикулярный горизонтальной проекции горизонтали h’. На фронтальную плоскость окружность, по которой движется точка, проецируется в эллипс. Строить его нет необходимости.
- При вращении вокруг фронтали f точка перемещается по окружности, которая проецируется на фронтальную плоскость в отрезок прямой, перпендикулярный фронтальной проекции фронтали f». Вместе с тем горизонтальная проекция линии перемещения представляет собой эллипс, строить который не обязательно.
Рассмотрим, как определить действительную величину угла между прямыми a и b, пересекающимися в точке A. Построения представлены на рисунке и выполнены согласно алгоритму, который описан ниже.

- Проводим фронтальную проекцию h» горизонтали h. Она пересекает прямые a» и b» в точках 1» и 2». Определяем горизонтальные проекции 1′ и 2′ и через них проводим h’.
- Находим центр вращения O. Его горизонтальная проекция O’ лежит на пересечении прямой h’ с перпендикуляром, проведенным из A’ к h’.
- Определяем натуральную величину радиуса вращения R = O’A’0. Для этого строим прямоугольный треугольник O’A’A’0, катет которого A’A’0 равен расстоянию от A» до h».
- Проводим дугу окружности радиусом R до пересечения её с прямой O’A’ в точке A’1. Соединяем A’1 с точками 1′ и 2′. Искомый угол ϕ построен.
Источник
Научная электронная библиотека

Пиралова О. Ф., Ведякин Ф Ф.,
5.5. Способ вращения. Вращение вокруг проецирующей прямой
Сущность этого способа заключается в том, что система плоскостей проекций П2/П1 остается неподвижной, а положение геометрических элементов изменяется путем вращения вокруг одной или двух выбранных осей до нужного положения в данной системе. В качестве оси вращения в этом случае удобнее всего выбирать проецирующие прямые или прямые уровни, тогда точка будет вращаться в плоскостях, параллельных или перпендикулярных плоскостям проекций.
При вращении используются следующие элементы вращения:
– ось вращения – прямая, вокруг которой осуществляется вращение.
– плоскость вращения – плоскость, проходящая через вращаемую точку и перпендикулярная оси вращения (плоскость окружности, которую описывает точка при вращении).
– центр вращения – точка пересечения оси вращения и плоскости вращения.
– радиус вращения – кратчайшее расстояние от вращаемой точки до центра (оси) вращения. Радиус всегда перпендикулярен оси вращения.
– угол поворота – угол между начальным и конечным положением радиуса вращения.
При вращении системы точек вокруг одной оси все точки вращаются в плоскостях, параллельных между собой, поворачиваются на один и тот же угол в одном и том же направлении, поэтому вращение является частным случаем плоскопараллельного перемещения. Точки, находящиеся на оси вращения остаются неподвижными.
Способ вращения состоит в том, что данная геометрическая фигура вращается вокруг некоторой неподвижной оси до требуемого положения относительно неподвижных плоскостей проекций. При этом каждая точка фигуры, например точка А (рис. 5.13), описывает окружность, расположенную в плоскости β, перпендикулярной оси вращения i. Центр O этой окружности является точкой пересечения оси вращения с плоскостью β. Радиус окружности равен расстоянию точки А до оси i (|R| = |AO|).
При вращении точки вокруг оси, перпендикулярной горизонтальной плоскости проекций, ее фронтальная проекция перемещается перпендикулярно линиям связи, а горизонтальная – по окружности, центром которой является горизонтальная проекция оси вращения.
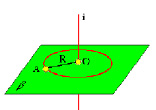
Рис. 5.13. Пример вращения точки вокруг оси,
перпендикулярной плоскости
При вращении точки вокруг оси, перпендикулярной фронтальной плоскости проекций, ее горизонтальная проекция перемещается перпендикулярно линиям связи, а фронтальная – по окружности, центром которой является фронтальная проекция оси вращения (рис. 5.14).
Рассмотрим вращение точки A(A1,A2,А3) вокруг горизонтально проецирующей прямой i (i1,i2,i3).
При вращении точка описывает окружность, плоскость которой β(β2) перпендикулярна оси i (i1,i2,i3). Поскольку i ⊥ П1, а β(β2) ⊥ i, β(β2) // П1 и угол поворота проецируется на П1 в натуральную величину.
Рассмотрим вращение точки A(A1,A2,А3) вокруг горизонтально проецирующей прямой i (i1,i2,i3).
При вращении точка описывает окружность, плоскость которой β(β2) перпендикулярна оси i (i1,i2,i3). Поскольку i ⊥ П1, а β(β2) ⊥ i, β(β2) // П1 и угол поворота проецируется на П1в натуральную величину.
Таким образом, при вращении вокруг горизонтально проецирующей прямой i(i1,i2) проекции точки A1, А’1, А»1, А»’1 перемещаются по окружности ℓ1 с центром в точке О1 и радиусом R = R1 = ОА = O1A1, фронтальные проекции A2, А’2, А»2, А»’2 перемещается по проекции фронтального следа плоскости β2 в пределах отрезка [А2,А»2].
Рассмотрим вращение точки A(A1,A2,А3) вокруг горизонтально проецирующей прямой i(i1,i2,i3).
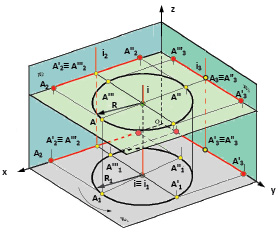
Рис. 5.14. Пример вращения точки А вокруг
горизонтально проецирующей прямой i (i ⊥ П1)
При вращении точка описывает окружность, плоскость которой β(β2) перпендикулярна оси i(i1,i2,i3). Поскольку i ⊥ П, а β(β2) ⊥ i, β(β2) // П1 угол поворота проецируется на П1в натуральную величину.
Таким образом, при вращении вокруг горизонтально проецирующей прямой i(i1,i2) проекции точки A1, А’1, А»1, А»’1перемещаются по окружности ℓ1 с центром в точке О1 и радиусом R = R1= ОА = O1A1, фронтальные проекции A2, А’2, А»2, А»’2 перемещается по проекции фронтального следа плоскости β2 в пределах отрезка [А2, А»2].
Если точка А вращается вокруг оси i ⊥ П1, то плоскость β, в которой располагается окружность, описываемая точкой, становится горизонтальной плоскостью уровня (β || П1).
Следовательно, окружность, описываемая точкой А в пространстве, спроецируется на плоскость П1 без искажения, а на плоскость П2 – в отрезок прямой A2 А»2, совпадающей с фронтальным следом плоскости β2.
Таким образом, вращение точки A вокруг горизонтально проецирующей прямой i(i1,i2) на комплексном чертеже (рис. 5.15.а) изображено следующим образом:
1) горизонтальная проекция A1, точки А перемещается по окружности радиуса | R | = | АО | = | А1О1 |;
2) фронтальная проекция А2 точки А перемещается по прямой, перпендикулярной линиям связи (вырожденная фронтальная проекция β2 плоскости β ║П1);
3) угол поворота φ° горизонтальной проекции A1 точки А равен углу поворота точки в пространстве.
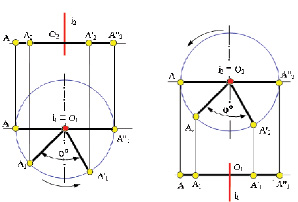
Рис. 5.15. Вращение точки А вокруг горизонтально проецирующей (а)
и фронтально проецирующей (б) прямых
Вращение точки A вокруг фронтально проецирующей прямой i(i1,i2) на комплексном чертеже (рис. 5.15.б) изображено следующим образом:
4) фронтальная A2, точки А перемещается по окружности радиуса R = | АО | = | А2О2 |;
5) горизонтальная проекция А1 точки А перемещается по прямой, перпендикулярной линиям связи (вырожденная горизонтальная проекция β1 плоскости β ║П2);
6) угол поворота φ° фронтальной проекции точки А равен углу поворота точки в пространстве.
Способом вращения тоже можно решать все основные на преобразование комплексного чертежа.
Задача 1. Преобразовать прямую общего положения в линию уровня.
Для того чтобы прямую общего положения ℓ(ℓ1, ℓ2) преобразовать, например, во фронталь, ее необходимо вращать около оси i ⊥ П1 (рис. 5.16).
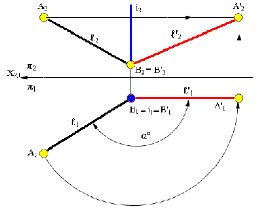
Рис. 5.16. Преобразование прямой линии общего положения
во фронтальную (фронталь) прямую
Для решения задачи необходимо:
1) выбрать две точки А(А1А2) и В(В1В2), принадлежащие прямой ℓ;
2) провести ось вращения i(i1,i2) перпендикулярно П1 через точку В(В1В2) прямой ℓ(ℓ1, ℓ2);
3) при вращении прямой ℓ вокруг оси i точка В прямой останется неподвижной, так как принадлежит оси, а точка А будет вращаться по правилам, рассмотренным выше;
4) угол поворота α° точки А и ее горизонтальной проекции А1 определяется между положением проекций А1В1 и А’1В’1.
Когда прямая ℓ займет положение параллельное П2, ее горизонтальная проекция ℓ’1 расположится перпендикулярно линиям связи.
Для определения положения проекции А’2 необходимо из А’1 провести вертикальную линию связи до пересечения с горизонтальной линией связи из фронтальной проекции А2. Пересечение этих двух линий связи определит новое положение проекции точки А’2.
Соединив между собой новые проекции точек, получим В’2А’2 натуральную величину прямой ℓ, что является решением первой задачи на преобразование комплексного чертежа.
Для преобразования прямой ℓ общего положения в горизонталь, ее необходимо вращать около оси i, перпендикулярной П2 и проходящей через какую-либо точку прямой (рис. 5.17).
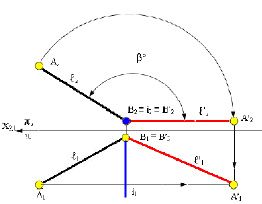
Рис. 5.17. Преобразование прямой линии общего положения
в горизонтальную (горизонталь) прямую
Для преобразования, заданной прямой, необходимо:
1) выбрать две точки А(А1А2) и В(В1В2), принадлежащие прямой ℓ;
2) провести ось вращения i (i1,i2) перпендикулярно П2 через точку В(В1В2) прямой ℓ(ℓ1, ℓ2);
3) при вращении прямой ℓ вокруг оси i точка В прямой остаётся неподвижной, так как принадлежит оси, и новое её положение будет с ней совпадать В2 ≡ В’2, а точка А будет вращаться по правилам, рассмотренным выше;
4) угол поворота β° точки А и ее фронтальной проекции А2 определяется между положением проекций А2В2 и А’2В’2, когда прямая ℓ займет положение, параллельное П1, ее фронтальная проекция ℓ’2 расположится перпендикулярно линиям связи.
Для определения положения проекции А’1 необходимо из А’2 провести вертикальную линию связи до пересечения с горизонтальной линией связи из А1. Пересечение этих двух линий связи определит новое положение проекции точки А’1. Соединив между собой новые проекции точек, получим В’1А’1 натуральную величину прямой ℓ, что является решением первой задачи на преобразование комплексного чертежа.
3адача 2. Преобразовать линию общего положения в проецирующую прямую (рис.5.18).
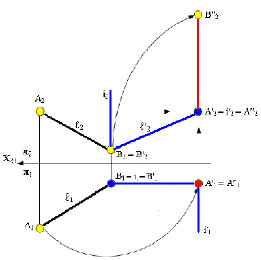
Рис. 5.18. Преобразование прямой линии общего положения
в горизонтально проецирующую
Вторую задачу на преобразование комплексного чертежа решать без решения первой задачи нельзя. Поэтому, если дана прямая общего положения, то для решения второй задачи необходимо выполнить два последовательных преобразования: вначале преобразовать ее в линию уровня (см. первую задачу), а затем линию уровня преобразовать в проецирующую (рис. 5.18, 5.19). Если линия уровня является фронталью, то ее можно преобразовать в горизонтально проецирующую прямую вращением около оси i’ перпендикулярной П2 (рис. 5.18). В рассматриваемом случае необходимо ось вращения провести через точку А’’. Во фронтальной плоскости проекций А’2 ≡ i’2 ≡ А’’2. Для определения нового положения точки В необходимо В’2 повернуть вокруг i’2 до положения В’’2. Соединив между собой новые проекции точек, получим В’’2А’’2, прямую перпендикулярную горизонтальной плоскости проекций (горизонтально проецирующую), что является решением второй задачи на преобразование комплексного чертежа.
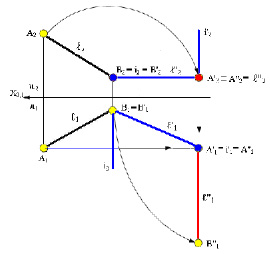
Рис. 5.19. Преобразование прямой общего положения
во фронтально-проецирующую
Если линия уровня является горизонталью, то ее можно преобразовать во фронтально проецирующую прямую вращением около оси i’ перпендикулярной П1 (рис. 5.19). В рассматриваемом случае необходимо ось вращения провести через точку А’’.
В горизонтальной плоскости проекций А’1 ≡ i’1 ≡ А’’1. Для определения нового положения точки В необходимо В’1 повернуть вокруг i’1 до положения В’’1. Соединив между собой новые проекции точек, получим В’’1А’’1, прямую перпендикулярную фронтальной плоскости проекций (фронтально проецирующую), что является решением второй задачи на преобразование комплексного чертежа.
Задача 3. Преобразовать чертеж так, чтобы плоскость общего положения Σ(ΔАВС) после поворота стала проецирующей (рис. 5.20).
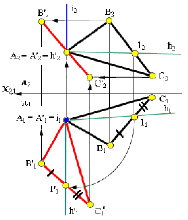
Рис. 5.20. Преобразование плоскости Σ(ΔАВС) во фронтально-проецирующую
При решении таких задач необходимо знать, что две плоскости взаимно перпендикулярны, если одна из них проходит через прямую, перпендикулярную к другой плоскости. Таким образом, если какую-либо прямую, принадлежащую плоскости Г, преобразовать в проецирующую, то плоскость Г тоже станет проецирующей.
Для того чтобы плоскость преобразовать во фронтально проецирующую, ее необходимо вращать вокруг оси i ⊥ П1, а в качестве вспомогательной линии уровня взять горизонталь. Для решения этой задачи можно использовать плоскость треугольника ΔАВС. Если плоскость Г(ΔАВС) вращать вокруг оси i ⊥ П1, то горизонталь (h), принадлежащая плоскости, может быть повернута в положение, перпендикулярное плоскости П2, при этом плоскость Г станет фронтально проецирующей (рис. 5.20).
Построения новой горизонтальной проекции А’1В’1С’1 треугольника ΔАВС в плоскости нужно провести горизонталь (А111), которую одним поворотом сделать проецирующей прямой. За ось вращения i можно принять горизонтально проецирующую прямую, которую для удобства решения, провести через точку (А), принадлежащую плоскости. В горизонтальной плоскости проекций П1 проекции исходного и нового положения точки А и оси вращения совпадают А1 ≡ А’1 ≡ i1. При повороте точек В1 и С1 вокруг i1 величина их угла поворота равна величине угла поворота горизонтальной проекции горизонтали h1. В результате поворота треугольник ΔА’В’С’ оказывается перпендикулярным П2 и поэтому его фронтальная проекция В’2А2С’2 вырождается в прямую линию, построение которой необходимо выполнить по правилам, рассмотренным выше.
Фронтальные проекции начального и нового положений точки А совпадают А2 ≡ А’2. Положения точек В2 и С2 определяются в пересечении вертикальных и горизонтальных линий связи соответствующих точек. Для определения положения В’2 необходимо из В’1провести вертикальную, а из В2 горизонтальную линии связи. Для определения положения С’2 необходимо из С’1 провести вертикальную, а из С2 горизонтальную линии связи. Новые положения точек плоскости Г во фронтальной плоскости проекций П2 находятся на одной прямой, что подтверждает условие перпендикулярности Г ⊥ П2 и решение третьей задачи на преобразование комплексного чертежа.
Для того чтобы плоскость Σ преобразовать в горизонтально проецирующую, её необходимо вращать вокруг оси i ⊥ П2, а в качестве вспомогательной линии уровня взять фронталь (рис. 5.21).
В качестве плоскости Σ можно использовать треугольник ΔDEK.
Если плоскость Σ (DEK) вращать вокруг оси i ⊥ П2, то фронталь (f), принадлежащая плоскости, может быть повернута в положение, перпендикулярное плоскости П1, при этом плоскость Σ станет горизонтально проецирующей (рис. 5.21).
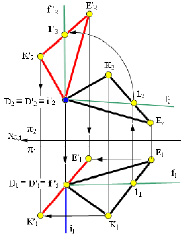
Рис. 5.21. Преобразование плоскости Σ (ΔАВС) в горизонтально- проецирующую
Для построения новой горизонтальной проекции D’2E’2K’2 треугольника ΔDEK в плоскости нужно провести фронталь, которую одним поворотом сделать проецирующей прямой. За ось вращения i можно принять фронтально проецирующую прямую, которую для удобства решения, провести через точку (D), принадлежащую плоскости.
Во фронтальной плоскости проекций П2 проекции исходного и нового положения точки D и оси вращения совпадают D2 ≡ D’2 ≡ i2. При повороте точек E2 и K2 вокруг i2 величина их угла поворота равна величине угла поворота фронтальной проекции фронтали f2.
В результате поворота треугольник D’E’K’ оказывается перпендикулярным П1 и поэтому его горизонтальная проекция D’1 E11 K’2 вырождается в прямую линию, построение которой необходимо выполнить по правилам, рассмотренным выше.
Горизонтальные проекции начального и нового положений точки D совпадают D1 ≡ D’1. Положения точек E1 и K1 определяются в пересечении вертикальных и горизонтальных линий связи соответствующих точек. Для определения положения E’1 необходимо из E1 провести горизонтальную, а из E’2 вертикальную линии связи. Для определения положения К’1 необходимо из К1 провести горизонтальную, а из К’2 вертикальную линии связи. Новые положения точек плоскости Σ в горизонтальной плоскости проекций П1 расположены на одной прямой, что подтверждает условие перпендикулярности Σ ⊥ П1и решение третьей задачи на преобразование комплексного чертежа.
Источник



