
- Методы управления двигателем постоянного тока в САУ
- Digitrode
- цифровая электроника вычислительная техника встраиваемые системы
- Двигатели постоянного тока и управление ими с помощью широтно-импульсной модуляции. Часть 1.
- Способы управления электродвигателями
- Управление коллекторными электродвигателями постоянного тока
- Управление универсальными двигателями
- Управление бесщеточными электродвигателями переменного тока
Методы управления двигателем постоянного тока в САУ
Управление двигателем постоянного тока в САУ подразумевает либо изменение скорости вращения пропорционально некоторому сигналу управления, либо поддержание этой скорости неизменной при воздействии внешних дестабилизирующих факторов.
Используются 4 основные метода управления, реализующие перечисление выше принципы:
управление по системе «генератор-двигатель» (Г-Д);
управление по системе «управляемый выпрямитель –Д» (УВ-Д);
Подробное исследование этих способов – предмет ТАУ и курса «Основы электропривода». Мы рассмотрим только основные положения, имеющие непосредственное отношение к электромеханике.

Обычно используются 3 схемы:
при регулировке скорости n от 0 до nном в цепь якоря включают реостат (якорное управление);
при необходимости получить n > nном реостат включают в цепь ОВ (полюсное управление);
для регулирования скорости n nном реостаты включают как в цепь якоря, так и в цепь ОВ.
Перечисленные схемы применяются при ручном управлении. Для автоматического управления используют ступенчатое переключение R ра и R рв с помощью контакторов (реле, электронных коммутаторов).
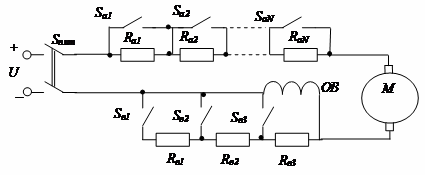
Если требуется точное и плавное регулирование скорости, число коммутируемых резисторов и элементов коммутации должно быть большим, из-за чего увеличиваются габариты системы, стоимость и снижается надежность.
Управление по системе Г-Д
Регулирование частоты вращения от 0 до по схеме рис. производится регулировкой R в (U гизменяется от 0 до n ном). Для получения скорости двигателя больше nном — изменением R вд (уменьшение тока ОВ двигателя уменьшает его основной поток Ф, что и приводит к увеличению скорости n).
Переключатель S1 предназначен для реверса двигателя (изменения направления вращения его ротора).
Поскольку управление Д осуществляется путем регулирования сравнительно малых токов возбуждения Г и Д, оно легко адаптируется к задачам САУ.
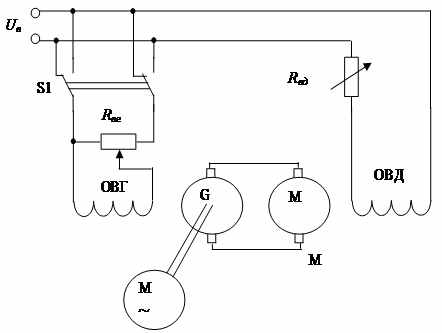
Недостаток такой схемы – большие габариты системы, масса, низкий КПД, поскольку здесь имеется трехкратное преобразование преобразование энергии (электрической в механическую и обратно, и на каждом этапе имеются потери энергии).
Управление по системе «управляемый выпрямитель – двигатель»
Система «управляемый выпрямитель – двигатель» (см. рисунок) похожа на предыдущую, но вместо электромашинного источника регулируемого напряжения, состоящего из, например, трехфазного, двигателя переменного тока и Г=Т, используется управляемый, например, тоже трехфазный тиристорный электронный выпрямитель.
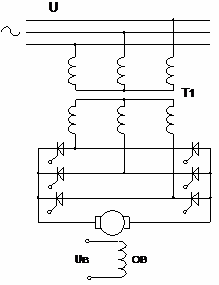
Сигналы управления формируются отдельным блоком управления и обеспечивают требуемый угол открывания тиристоров, пропорциональный сигналу управления Uу.
Достоинства такой системы — высокий КПД, малые габариты и масса.
Недостатком по сравнению с предыдущей схемой (Г-Д) является ухудшение условий коммутации Д из-за пульсаций его тока якоря, особенно при питании от однофазной сети.
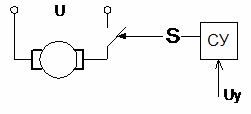
На двигатель с помощью импульсного прерывателя подаются импульсы напряжения, модулированные (ШИМ, ВИМ) в соответствии с управляющим напряжением.
Таким образом, изменение скорости вращения якоря достигается не за счет изменения напряжения управления, а путем изменения времени, в течение которого к двигателю подводится номинальное напряжение. Очевидно, что работа двигателя состоит из чередующихся периодов разгона и торможения (см. рисунок).
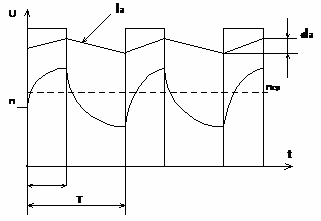
Если эти периоды малы по сравнению с полным временем разгона и остановки якоря, то скорость n не успевает к концу каждого периода достигать установившихся значений nном при разгоне или n = 0 при торможении, и устанавливается некоторая средняя скорость nср, величина которой определяется относительной продолжительностью включения.
Поэтому в САУ требуется схема управления, назначение которой – преобразование постоянного или изменяющегося сигнала управления в последовательность управляющих импульсов с относительной продолжительностью включения, являющейся заданной функцией величины этого сигнала. В качестве элементов коммутации используются силовые полупроводниковые приборы – полевые и биполярные транзисторы, тиристоры.
Если Вам понравилась эта статья, поделитесь ссылкой на неё в социальных сетях. Это сильно поможет развитию нашего сайта!
Подписывайтесь на наш канал в Telegram!
Просто пройдите по ссылке и подключитесь к каналу.
Не пропустите обновления, подпишитесь на наши соцсети:
Источник
Digitrode
цифровая электроника вычислительная техника встраиваемые системы
Двигатели постоянного тока и управление ими с помощью широтно-импульсной модуляции. Часть 1.
Электродвигатели это очень распространенный объект управления в различных устройствах и технических комплексах. Без них наша современная жизнь была бы не такой уж и современной. Они используются во многих сферах потребительской техники и промышленной автоматизации, начиная от небольших двигателей, вращающих барабан стиральной машинки, и заканчивая огромными махинами, приводящими в движение заводские конвейеры и шахтные подъемники.

Традиционно электродвигатели делят на двигатели постоянного тока и двигатели переменного тока. Последние в силу бурного развития научно-технической мысли, которая предлагает более совершенные алгоритмы векторного управления и довольно дешевые и удобные в использовании частотники, приобретают все большую популярность. Но двигатели постоянного тока (ДПТ) тоже имеют свои преимущества, и они еще долгое время будут крутить свои валы в режиме нещадной эксплуатации в различных технических областях, поэтому сегодня речь пойдет именно о ДПТ, точнее об управлении коллекторными электродвигателями постоянного тока.
Такие агрегаты были первыми двигателями, нашедшими широкое применение в промышленном оборудовании, и их до сих пор используют там, где требуется невысокая стоимость конечного устройства, простая установка и управление. На роторе этих двигателей располагается обмотка (1 на рисунке 1), а на статоре — электромагниты (2 на рисунке 1). Щеточные контакты (3 на рисунке 1), которые устанавливаются по окружности вала ротора, применяются для переключения полярности напряжения, прикладываемого к обмотке ротора. Они же создают основную проблему эксплуатации коллекторного ДПТ — ненадежность, поскольку претерпевают сильный износ и требуют периодической замены. Также между щетками и коммутаторными контактами в ходе работы возникают искры, что может привести к возникновению сильных электромагнитных помех. Кроме того, при неправильной эксплуатации всегда имеется риск создать электрическую дугу в коллекторе или, как еще это называют, круговой огонь. В этом случае якорь двигателя гарантированно отживает свой срок.

Рисунок 1 – двигатель постоянного тока
Сегодня получили распространение две схемы управления двигателем такого типа: генератор-двигатель (Г-Д) и преобразователь-двигатель (тиристорный ТП-Д и транзисторный ТрП-Д).

Рисунок 2 – силовые схемы электроприводов постоянного тока а) Г-Д, б) ТП-Д или ТрП-Д
На рисунке 2 показаны две схемы управления ДПТ с независимым возбуждением. В обоих случаях управление угловой скоростью и моментом по абсолютному значению и направлению осуществляют путем регулирования напряжения на якоре двигателя. Напряжение на якоре двигателя Д в системе Г-Д регулируют путем изменения силы тока в обмотке возбуждения генератора (ВГ). Для этой цели служит возбудитель генератора ВГ, в качестве которого используют силовые магнитные усилители (системы МУ-Г-Д, хотя это прошлый век, и в современных системах такого не встретишь), тиристорные (ТВ-Г-Д) или транзисторные (ТрВ-Г-Д) преобразователи. В системах ТП-Д напряжение на якоре двигателя регулируют путем фазового управления коммутацией тиристоров, а в системах ТрП-Д путем изменения скважности пульсирующего питающего напряжения, то есть с помощью широтно-импульсной модуляции (ШИМ).
Популярность Г-Д, а также ТП-Д с каждым годом падает из-за их громоздкости, аппаратной избыточности и сложности в управлении, по сути, они в основном применяются в промышленности для управления крупными двигателями. А ТрП-Д все чаще применяется в различных технических системах благодаря своей простоте, дешевизне и удобству управления. Также за счет обилия на рынке различных моделей MOSFET и IGBT-транзисторов и драйверов управления их затворами системы ТрП-Д применяются для управления как маломощными, так и крупными двигателями. Думаю, это стоит того, чтобы познакомиться с такими системами ближе.
Итак, сердцем ТрП-Д является широтно-импульсный преобразователь (ШИП), который состоит из четырех транзисторов (рисунок 3). В диагональ такого транзисторного моста включается нагрузка, то есть якорь двигателя. Питается ШИП от источника постоянного тока.

Рисунок 3 – схема транзисторного ШИП
Есть несколько способов управления ШИП по цепи якоря. Самый простой – это симметричный способ. При таком управлении в состоянии переключения находятся все четыре транзистора, и выходное напряжение ШИП представляет собой знакопеременные импульсы, длительность которых регулируется входным сигналом. Сам принцип переключения показан на рисунке 4. Логично предположить, если относительная продолжительность включения будет равна 50%, то на выходе ШИП получим 0 В. Преимуществом симметричного способа является простота реализации, но двухполярное напряжение на нагрузке, вызывающее пульсации тока в якоре, является его недостатком. По сути, он используется для управления маломощными ДПТ.

Рисунок 4 – симметричный способ управления ДПТ
Более совершенным является несимметричный способ управления. Как мы видим на рисунке 5, он обеспечивает на выходе ШИП однополярное напряжение. В данном случае переключаются лишь два транзистора Т3 и Т4, при этом Т1 постоянно открыт, а Т2 постоянно закрыт. Для того, чтобы среднее напряжение на выходе ШИП было равно нулю, достаточно чтобы нижний переключающийся транзистор оставался в закрытом состоянии. Такой подход тоже не очень хорош тем, что верхние ключи загружены по току больше, чем нижние. При больших нагрузках это может привести к перегреву и выходу транзисторов из строя.

Рисунок 5 – несимметричный способ управления ДПТ
Но и с этим недостатком справились, придумав способ поочередного управления (рисунок 6). Здесь как при движении как в одну сторону, так и в другую будут переключаться все четыре транзистора. Обязательным условием является нахождение в противофазе управляющих напряжений транзисторов Т1 и Т2 для одной группы и Т3 и Т4 для другой.

Рисунок 6 – поочередный способ управления ДПТ
Из рисунка видим, что при определенном знаке сигнала задания на скорость длинные импульсы с разницей в полпериода подаются на диагонально противоположные ключи (в данном случае Т1 и Т4). Соответственно, также со сдвигом полпериода на ключи противоположной диагонали подаются короткие импульсы. Таким образом, нагрузка подключается к источнику во время отсутствия коротких импульсов, а во время их присутствия закорачивается либо на питание, либо на землю. При изменении знака задания транзисторы управляются противоположным образом.
В общем, такой краткий теоретический экскурс, надеюсь, поможет понять, как легко и просто запускать ДПТ. Для более подробного осмысления и понимания, что такое двигатели постоянного тока (да и не только постоянного) рекомендую книгу Кацмана М.М. «Электрические машины автоматических устройств». А для детального ознакомления с силовой частью электропривода и принципами управления советую почитать Семенова Б.Ю. «Силовая электроника: от простого к сложному», Розанова Ю.К. «Основы силовой электроники» и Воронина П.А. «Силовые полупроводниковые ключи».
Во второй части на конкретном примере мы более детально рассмотрим ШИМ-управление и поймем, что двигатель крутится вовсе не потому, что он круглый!
Источник
Способы управления электродвигателями
Управление коллекторными электродвигателями постоянного тока
Из уравнения скорости электродвигателя постоянного тока видно, что частота вращения коллекторного электродвигателя постоянного тока напрямую связана с величиной напряжения питания прикладываемого к двигателю и момента нагрузки.

- где
 — угловая частота, рад/с,
— угловая частота, рад/с, - U — напряжение питания, В,
- – постоянная ЭДС, В∙с/рад,
- M — момент электродвигателя, Н∙м,
- — механическая жесткость двигателя.
 — угловая частота, рад/с,
— угловая частота, рад/с, – постоянная ЭДС, В∙с/рад,
– постоянная ЭДС, В∙с/рад, — механическая жесткость двигателя.
— механическая жесткость двигателя.Таким образом скорость вращения коллекторного двигателя постоянного тока изменяется посредством изменения величины напряжения питания.
Управление универсальными двигателями
Универсальный коллекторный двигатель может быть подключен как к сети постоянного тока, так и к сети переменного тока. Так же как и у коллекторного двигателя постоянного тока, скорость универсального двигателя управляется величиной напряжения питания, а не его частотой.
Управление бесщеточными электродвигателями переменного тока
Электроприводы с электродвигателем переменного тока наиболее часто используются в составе: насосов, вентиляторов, компрессоров, станков и других механизмов, для которых важно поддерживать скорость вращения вала двигателя, либо определенный технологический параметр.
Основным элементом современного электропривода является система управления электродвигателем: частотный преобразователь или сервопривод.
Преобразователь частоты позволяет управлять моментом и скоростью вращения электродвигателя и исполнительного механизма.
Сервопривод позволяет точно управлять угловым положением, скоростью и ускорением исполнительного механизма.
При этом современные высокопроизводительные методы управления двигателями переменного тока используемые в современных частотных преобразователях и в сервоприводах имеют единую концепцию управления — векторное управление.
Источник



