
- Физика
- Тестирование онлайн
- Вектор
- Проекция вектора
- Сложение векторов
- Вычитание векторов
- Упражнения
- Учебники
- Журнал «Квант»
- Общие
- Правило треугольника
- Правило параллелограмма
- Вычитание векторов
- Векторы
- 1. Сложение векторов
- 2. Вычитание векторов
- 3. Векторы и числа
- 4. Разбиение векторов на координаты
- Обратная задача
- Способ сложения векторов физика
Физика
Тестирование онлайн
Вектор
Вектор — это отрезок, который имеет направление. Конец вектора совпадает со стрелкой, начало — точка. Модуль вектора (абсолютная величина) — длина этого направленного отрезка.
Если начало вектора совпадает с его концом, получим нулевой вектор.
Два вектора являются равными, если их длина одинаковая и они имеют одинаковое направление. Они совмещаются при переносе.

На рисунке только вектор a равен вектору b. Вектор c им не равен, так как направлен в противоположную сторону
Вектор -c — это вектор c, но противоположного направления. Тогда 
Проекция вектора
Проекция вектора на ось имеет положительное значение в том случае, когда направление вектора совпадает с направлением оси. Отрицательное значение — в противоположном случае.

Спроецируем вектор перемещения на ось Ox и на ось Oy. Для того, чтобы получить проекцию необходимо из координаты конца вектора отнять координату начала. На ось ОХ: sx=x-x0, на ось ОУ: sy=y-y0.



Частные случаи, когда проекция на ось Ox или Oy нулевая.


Сумма составляющих вектора по осям равна данному вектору, т.е. 
Сложение векторов
Правило параллелограмма: диагональ параллелограмма — сумма двух векторов с общим началом.
Правило треугольника: от конца первого вектора отложить второй вектор, тогда их суммой будет вектор, начало которого совпадает с началом первого вектора, а конец с концом второго вектора.
Рассмотрим правила на примерах.
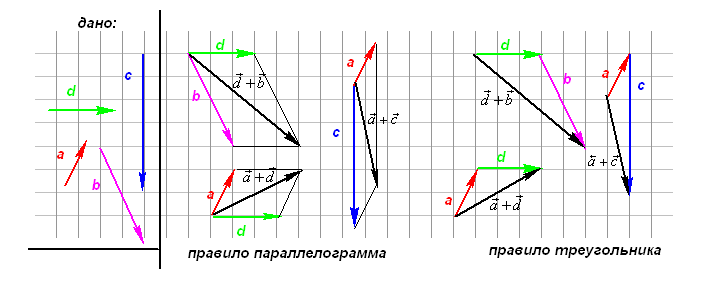
Вычитание векторов
Вычитание векторов — это сумма положительного и отрицательного вектора.

Упражнения
Может ли при сложении двух векторов по правилу параллелограмма равнодействующая быть численно равной одному из составляющих векторов?
Может ли при сложении двух векторов по правилу параллелограмма равнодействующая быть меньше меньшего из составляющих векторов?
Источник
Учебники
Журнал «Квант»
Общие
Скаляры можно складывать, умножать и делить так же, как обычные числа.
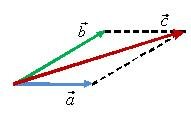
Поскольку вектор характеризуется не только числовым значение, но и направлением, сложение векторов не подчиняется правилам сложения чисел. Например, пусть длины векторов a = 3 м, b = 4 м, тогда a + b = 3 м + 4 м = 7 м. Но длина вектора \(\vec c = \vec a + \vec b\) не будет равна 7 м (рис. 1).
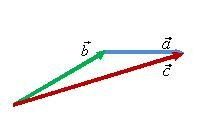
Для того, чтобы построить вектор \(\vec c = \vec a + \vec b\) (рис. 2), применяются специальные правила сложения векторов.
А длину вектора суммы \(\vec c = \vec a + \vec b\) определяют по теореме косинусов \(c = \sqrt
Правило треугольника
В зарубежной литературе этот метод называют «хвост к голове».
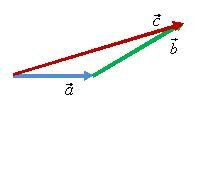
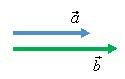
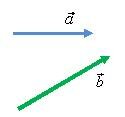
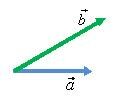
Для того чтобы сложить два вектора \(\vec a\) и \(\vec b\) (рис. 3, а) нужно переместить вектор \(\vec b\) параллельно самому себе так, чтобы его начало совпадало с концом вектора \(\vec a\) (рис. 3, б). Тогда их суммой будет вектор \(\vec c\), начало которого совпадает с началом вектора \(\vec a\), а конец — с концом вектора \(\vec b\) (рис. 3, в).
 а б в Рис. 3.
а б в Рис. 3.
Результат не поменяется, если перемещать вместо вектора \(\vec b\) вектор \(\vec a\) (рис. 4), т.е. \(\vec b + \vec a = \vec a + \vec b\) (свойство коммутативности векторов).

 а б в Рис. 4. vector-treug-1.swf «Правило треугольников» Пример 1 Увеличить Flash vector-treug-2.swf «Правило треугольников» Пример 2 Увеличить Flash Рис. 5.
а б в Рис. 4. vector-treug-1.swf «Правило треугольников» Пример 1 Увеличить Flash vector-treug-2.swf «Правило треугольников» Пример 2 Увеличить Flash Рис. 5.
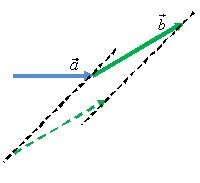
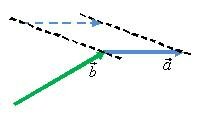
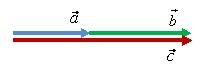
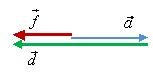
При помощи правила треугольника можно сложить два параллельных вектора \(\vec a\) и \(\vec b\) (рис. 6, а) и \(\vec a\) и \(\vec d\) (рис. 7, а). Суммы этих векторов \(\vec c = \vec a + \vec b\) и \(\vec f = \vec a + \vec d\) изображены на рис. 6, б и 7, б. Причем, модули векторов \(c = a + b\) и \(f=\left|a-d\right|\).
 а б Рис. 6.
а б Рис. 6. 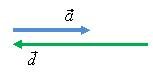
 а б Рис. 7.
а б Рис. 7.
Правило треугольника можно применять при сложении трех и более векторов. Например, \(\vec c = \vec a_1 + \vec a_2 +\vec a_3 +\vec a_4\) (рис. 8).
Правило параллелограмма
Для того чтобы сложить два вектора \(\vec a\) и \(\vec b\) (рис. 9, а) нужно переместить их параллельно самим себе так, чтобы начала векторов \(\vec a\) и \(\vec b\) находились в одной точке (рис. 9, б). Затем построить параллелограмм, сторонами которого будут эти вектора (рис. 9, в). Тогда суммой \(\vec a+ \vec b\) будет вектор \(\vec c\), начало которого совпадает с общим началом векторов, а конец — с противоположной вершиной параллелограмма (рис. 9, г).
 а б
а б 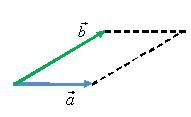
 в г Рис. 9. vector-paral-1.swf «Правило параллепипеда» Увеличить Flash Рис. 10.
в г Рис. 9. vector-paral-1.swf «Правило параллепипеда» Увеличить Flash Рис. 10.
Вычитание векторов
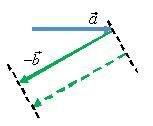
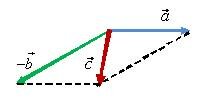
Для того чтобы найти разность двух векторов \(\vec a\) и \(\vec b\) (рис. 11) нужно найти вектор \(\vec c = \vec a + \left(-\vec b \right)\) (см. Умножение вектора на скаляр) по правилу треугольника (рис. 12) или по правилу параллелограмма (рис. 13).
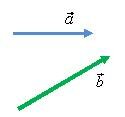 Рис. 11
Рис. 11 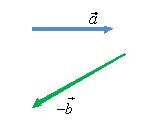
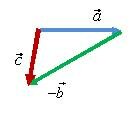 а б в Рис. 12.
а б в Рис. 12. 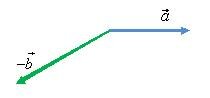 а б
а б 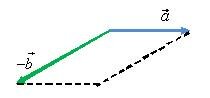
 б в Рис. 13.
б в Рис. 13.
Источник
Векторы
Никто не будет спорить, что к месту назначения невозможно добраться не зная направления движения. В физике это понятие называется вектором. До этого момента мы с вами оперировали некоторыми числами и значениями, которые называются величинами. Вектор отличается от величины наличием направления.
При работе с вектором оперируют его направлением и величиной. Физический параметр без учета направления называют скаляром.
Визуально вектор отображают в виде стрелки. Длина стрелки — величина вектора.
В физике для обозначения векторов используют заглавную букву со стрелкой наверху.
Векторы можно сравнивать. Два вектора будут равны, если они имеют одинаковую величину и направление.
1. Сложение векторов
Вектора можно складывать. Результирующий вектор является суммой обоих векторов и определяет расстояние и направление. Например, вы проживаете в Киеве и решили проведать старых друзей в Москве, а оттуда сделать визит к любимой теще во Львов. Насколько далеко вы будете находиться от родного дома, гостюя у мамы жены?
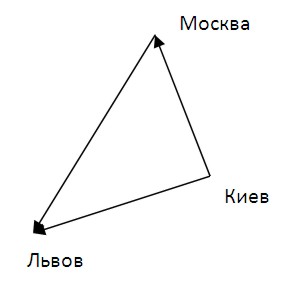
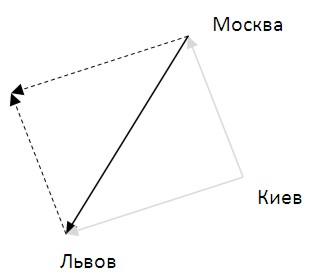
Для ответа на этот вопрос вам надо начертить вектор от исходной точки путешествия (Киев) и до конечной (Львов). Новый вектор определяют результат всего путешествия от начала и до конца.
- Вектор А — Киев-Москва
- Вектор В — Москва-Львов
- Вектор С — Киев-Львов
С = А+В, где С — сумма векторов или результирующий вектор
2. Вычитание векторов
Вектора можно не только складывать, но и вычитать! Для этого надо совместить основания вычитаемого и вычитающего векторов и соединить их концы со стрелками:
- Вектор А = С-В
- Вектор В = С-А
3. Векторы и числа
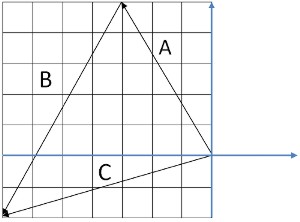
Наложим на наши вектора координатную сетку. Для вектора А можно сказать, что он направлен на 5 клеток вверх (положительное значение оси Y) и на 3 клетки влево (отрицательное значение оси Х): X=-3; Y=5.
Для вектора В: направление на 4 клетки влево и 7 клеток вниз: X=-4; Y=-7.
Т.о., для сложения векторов по осям X и Y надо сложить их координаты. Чтобы получить координаты результирующего вектора по осям X и Y:
4. Разбиение векторов на координаты
Рассмотрим задачу: шар движется со скоростью 10м/с по наклонной плоскости с длиной основания X=1м, распложенной под 30° к горизонту. Требуется определить время, за которое шар переместится от начала к концу плоскости.
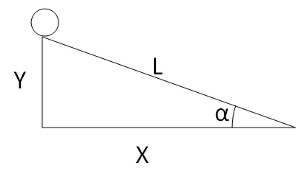
В данной задаче скорость является вектором V с величиной 10м/с и направлением α=30° к горизонтали. Чтобы определить скорость перемещения шара вдоль основания наклонной плоскости, нам надо определить X-составляющую перемещения шара, которая является скаляром (имеет только значение, но не направление) и обозначается Vx. Аналогично, Y-составляющая скорости также скаляр и обозначается Vy. Вектор скорости через составляющие: V = (Vx;Vy)
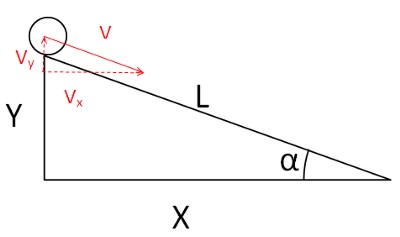
Определим составляющие (Vx;Vy). Вспоминаем тригонометрию:
Х-составляющая скорости шара:
Vx = V·cosα = V·cos30° = 10,0·0,866 = 8,66 м/с
Горизонтальная скорость шара равна 8,66 м/с.
Т.к. длина основания наклонной плоскости равна 1м, то это расстояние шар преодолеет за:
1,00(м)/8,66(м/с) = 0,12 с
Т.о., шару потребуется 0,12с для перемещения вдоль наклонной плоскости. Ответ: 0,12с
Интереса ради определим Y-составляющую скорости:
Vy = V·sinα = 10·1/2 = 5,0 м/с
Поскольку время «путешествия» шара одинаково для обеих составляющих, то можем определить высоту Y, с которой катился шар:
5,0(м/с)·0,12(с) = 0,6 м
Расстояние, пройденное шаром:
L = √1,00 2 + 0,60 2 = √1,36 = 1,16м
Обратная задача
Рассмотрим задачу, обратную предыдущей:
Шар переместился вдоль наклонной плоскости на высоту 0,6м, при этом в горизонтальной плоскости его перемещение составило 1,0м. Необходимо найти расстояние, пройденное шаром и угол.
Расстояние вычисляем по теореме Пифагора:
L = √1,00 2 + 0,60 2 = √1,36 = 1,16м
X = L·cosα; Y = L·sinα
X/L = cosα; Y/L = sinα
Теперь можно найти угол:
α = arccos(X/L); α = arcsin(Y/L)
α = arccos(1/1,16) = 30°
Промежуточное вычисление L можно исключить:
Y = X·tgα
α = arctg(Y/X)
Если вам понравился сайт, будем благодарны за его популяризацию 🙂 Расскажите о нас друзьям на форуме, в блоге, сообществе. Это наша кнопочка:

Код кнопки:
Политика конфиденциальности Об авторе
Источник
Способ сложения векторов физика
Из предыдущего параграфа мы знаем, что есть скалярные физические величины и есть векторные физические величины. Например, скорость – вектор, перемещение — вектор. Длина пути – скаляр (просто одно число с размерностью расстояния). А перемещение имеет длину и направление. Поэтому, это вектор. В трехмерной прямоугольной системе координат вектор перемещения можно определить, как тройку чисел, компонентов вектора по осям X , Y , Z . Эта тройка чисел однозначно задает направление и величину вектора перемещения.

Для чего нам понадобились вектора? И какие операции можно производить с векторами? И все-таки, любая ли тройка чисел задает вектор?
Для начала, чтобы нагляднее представить себе, что можно делать с векторами, будем представлять себе все вектора, как операции перемещения в пространстве. Операции, которые задаются тройкой чисел (компонентов). Такие операции можно применить к любой точке пространства (обобщенно, к любому физическому телу).
Сразу становятся понятны операции сложения и вычитания векторов. Просто последовательно применяем к точке один вектор, потом другой. Понятно, почему можно изменить порядок слагаемых и сумма (общее перемещение) не изменится. Понятно, что вычитание – есть прибавление вектора с обратным знаком (меняем направление стрелки).
Для всех векторов это справедливо! Но что особенно важно – это справедливо для всех векторных функций.
Если у нас есть две векторные функции

Удобство применения векторов прежде всего заключается в краткости и понятности записи формул.

Например, материальная точка, движется по произвольной кривой в трехмерном пространстве с осями координат X , Y , Z .


где векто р ∆r = r(t1) – r(t 0 ) – есть вектор перемещения.

Приведенная выше векторная формула для скорости материальной точки в трехмерном пространстве означает, что

Вместо определенного момента t 0 мы можем выбрать произвольный момент времени t . И рассматривать функцию r ( t ) – векторную функцию зависимости координат от времени для случая трехмерного пространства. В общем случае неважно сколько размерностей в рассматриваемом нами пространстве – хоть две, хоть двадцать две. Одномерный случай – это тоже просто частный случай нашей векторной формулы. Вот чем удобны вектора!
Тогда v(t) — векторная функция зависимости мгновенной скорости нашего тела от времени


Где и запись с точками и запись дробью с буквой d — это всего лишь формы записи второй производной по времени. Просто векторную функцию r(t) продифференцировали два раза. После первого дифференцирования нашли первую производную – это функция скорости. После второго дифференцирования нашли вторую производную, которая есть функция зависимости ускорения от времени.
В обратном порядке a ( t ), v ( t ), r ( t ) – каждая следующая есть «первообразная» предыдущей. Напомним, операция, обратная дифференцированию, называется операцией интегрирования (или нахождения первообразной функции). Скажем упрощенно, нахождению функции, которая была до операции по ее дифференцированию.
Теперь, когда мы начали понимать физический смысл некоторых векторных функций, продолжим рассматривать другие операции, которые возможно выполнять с векторами.
Пусть у нас есть два вектора. F – вектор силы, действующей на материальную точку (Напомним: «материальная точка» — тело, имеющее массу, размерами которого можно пренебречь в данной задаче). И S – вектор перемещения нашей материальной точки под действием силы F .

Мы знаем, что работа (та, которая сила, умноженная на перемещение вдоль силы, или, по-другому, перемещение, умноженное на силу вдоль перемещения, или просто сила, умноженная на перемещение в одномерном случае) в нашем трехмерном «векторном» случае будет равняться скалярному произведению вектора силы на вектор перемещения материальной точки под действием этой силы.

Мы с вами помним из школьного курса физики, что механическая работа в общем случае равна модулю вектора силы, умноженному на модуль вектора перемещения и умноженному на косинус угла между векторами силы и перемещения.

В случае, если вектора силы и перемещения заданы в виде троек компонентов векторов по соответствующим осям прямоугольной системы координат, гораздо проще, чем вычислять модули и косинус угла между векторами, прямо посчитать работу по формуле скалярного произведения векторов. Это просто сумма произведений соответствующих компонент.

В физическом смысле, мы просто складываем между собой три работы (по каждой из осей отдельно как бы своя работа). Это возможно (складывать компоненты работы по разным осям) только в случае, когда эти компоненты скаляры. Мы не будем вдаваться в подробное доказательство. Отошлем читателя за подробностями в интернет.
Просто запомним формулу (67) и смысл скалярного произведения векторов.
Очень важное замечание!
Здесь и в дальнейшем (и в предыдущем изложении) мы всегда рассматриваем «Правую» систему координат.

Если вправо направить ось X , вверх ось Y , то ось Z будет как бы входить в нас (идти в положительном направлении на нас, а не от нас). Это очень важно никогда не забывать. В противном случае в формулах будут ошибки. И особенно большая путаница будет при изучении электромагнетизма с его правыми и левыми руками.
Правая система координат! Берем правую руку. Раскрываем ладонь перед собой. Оттопыриваем большой палец – это положительное направление оси X . Четыре пальца перпендикулярных большому показывают положительное направление оси Y . Тогда из открытой ладони прямо на вас перпендикулярно осям X , Y будет выходить положительное направление оси Z .
Необходимо запомнить и никогда не путать!

Теперь возьмем нашу правую систему координат и зададим три единичных вектора, по одному вдоль каждой из осей.

Тогда любой вектор A = (А x , Ay , Az ) можно записать в виде суммы трех векторов

Легко заметить, что скалярные произведения наших единичных векторов

Эта удобная тройка векторов очень пригодится нам в дальнейшем.
Теперь напомним, любую ли тройку чисел можно считать вектором? Или по-другому, любую ли тройку функций ( f x ( t ), fy ( t ), fz ( t )) можно назвать векторной функцией f ( t ) ?
Нет, не любую! А только если модуль значения и пространственное направление не меняется при повороте и перемещении системы координат. (И при переходе из одной системы координат к другой тоже)
Это очень важно!
Вектора при переходе от одной системы координат к другой не меняются.
И результаты векторных операций при переходе от одной системы координат к другой так же не меняются!
Какие еще есть операции над векторами?
Существует еще операция, называемая «векторное произведение» векторов

«Ну и ну! Как это? Для чего?»
Все очень просто!
Для начала убедимся, что векторные произведения наших единичных векторов между собой:

Поиграв с единичными векторами, вы наверняка уже догадались, что векторное произведение двух векторов дает в результате вектор, перпендикулярный плоскости, в которой лежат вектора сомножители, а по модулю равный площади параллелограмма, ограниченного векторами сомножителями. Как на рисунке ниже, где вектора сомножители i и s расположили в плоскости X , Y и один из них расположили вдоль оси X .
Хотя, правильнее сказать, что систему координат расположили таким образом. А мы помним, результат не зависит от выбора системы координат.


Поэтому, всегда во всех задачах мы выбираем систему координат так, как нам удобно!
Итак, зачем нужна операция векторного произведения векторов, определенная выше? Рассмотрим задачу «о рычагах». Пусть у нас есть твердое тело, представляющее из себя систему из трех стержней, жестко скрепленных в одной точке. И эта точка закреплена в пространстве так, что она является центром вращения («точка закрепления шарнира»). Как на рисунке ниже.

Имеем три вектора r1 , r2 , r3 , выходящих из точки в которой мы расположим начало нашей системы координат – точки (0,0,0).
К концам стержней приложили силы F1 , F2 , F3 . Силы создают вектора моментов сил – «крутящие моменты», приложенные к нашему твердому телу.
Момент силы — это модуль вектора момента силы. Синонимы вектора момента силы: крутящий момент, вращательный момент, вертящий момент, вращающий момент).
Наглядно представить себе вектор момента силы можно следующим образом: Представьте себе юлу (детскую игрушку «волчок»). Чем сильнее мы его закрутим за ось, тем быстрее и дольше он вращается. Закрепим ось волчка на какой-то прямой так, чтобы она могла свободно вращаться. Представьте теперь, что вы будете тянуть за тело волчка, стараясь повернуть его вокруг закрепленной оси. А ваш товарищ будет пытаться удержать ось рукой. Представили?

Будет ли волчок поворачиваться вокруг оси? И если вы будете тянуть его в одну сторону, а ваш товарищ в другую, то в какую сторону будет поворачиваться волчок? В ту, чья сила больше? Не совсем. Представим ситуацию на картинке. Вы взялись ближе к оси, а ваш товарищ взялся за диск. Если ось достаточно тонкая, а диск достаточно большой, то как бы вы ни старались, волчок будет поворачиваться в сторону вашего товарища. Хотя силу вы приложите гораздо большую, чем он.
«Рычаг», скажете вы. И будете правы! Задача о рычагах по сути аналогична. И решается она очень просто с использованием операции векторного произведения, которую мы с вами рассмотрели выше.
Из формул (74) — (76) мы знаем, что векторное произведение двух векторов есть вектор, который по направлению перпендикулярен плоскости, в которой лежат вектора сомножители. Величину этого вектора по модулю можно вычислить с учетом формул (71) – (73), а модуль вычисляется по простой формуле:

Так вот, вектор момента силы, приложенной к телу, равен векторному произведению радиус-вектора точки приложения силы умноженному на вектор силы. Начало координат выбирается в точке закрепления тела на шарнире (например, в точке подвеса перекладины рычажных весов). То есть начало координат всегда берем в точке, относительно которой тело может поворачиваться.
Складывая вектора моментов всех приложенных к телу сил мы автоматически находим результирующий вектор, который и определяет в какую сторону и насколько интенсивно будет вращаться тело, показанное на рисунке 9 выше.

Просто складываем три вектора момента, от каждой из сил. Если сумма равна нулю, то наше твердое тело «стоит на месте». Если не равна нулю, то наше тело имеет ненулевой момент сил относительно «точки подвеса» в плоскости, перпендикулярной нашему вектору суммы моментов M . И с угловым ускорением, которое пропорционально модулю этого вектора.
Можно обобщить задачу на произвольное твердое тело с закрепленной в пространстве точкой подвеса и неограниченным количеством приложенных сил, как показано на рисунке.

Оно будет вращаться относительно оси, в которой лежит наш результирующий вектор момента сил. И вращение будет тем интенсивнее, чем больше этот результирующий вектор по модулю. Направление вращения будет зависеть от направления этого вектора. Направлен в одну сторону, вращается тело в одну сторону, направлен в другую, тело вращается в обратную.

Причем, если тело закрепить на оси, как в случае рассмотренного нами волчка, то задача становится двумерной. Вращение может быть только относительно оси и, соответственно, можно рассматривать моменты сил, только в системе координат, перпендикулярной оси. Это мы рассмотрим в дальнейшем.
Вопрос: каково условие невращения твердого тела в общем случае, показанном на рисунке 11? Другими словами, при каких условиях общий (суммарный) момент вращения тела равен нулю?
Ответ: Если сумма моментов всех сил равна нулю, то тело находится во «вращательном равновесии» — т.е. не имеет суммарного момента вращения.
Эта задача – более общая по отношению к школьной задаче о рычагах, изображенной на рисунке 24.

Благодаря определенной нами операции векторного произведения векторов задача решается в одно действие.
Ответ: Условие отсутствия вращающего момента тела


Так как согласно условиям рисунка 13:

Тогда с учетом формул (70) – (72) получаем:

Получаем условия равновесия наших рычажных весов:



Получаем знакомое из школьного учебника соотношение:

Можно решать сразу в векторной форме:

Можно ли сократить вектор ускорения свободного падения в уравнении (101) из обеих частей уравнения?
Потому, что для этого нужно обе части уравнения «разделить» на вектор g .
А операции векторного деления не существует!
Внимание! При оперировании векторами всегда нужно помнить, что мы можем применять к векторным уравнениям только существующие векторные операции!
Распишем покомпонентно наше векторное уравнение (101) в соответствии с формулами для векторного произведения (74) – (76). Заметим, что мы «правильно» расположили нашу систему координат таки образом, чтобы уравнения были проще. В результате этого в векторном уравнении (101) только составляющие векторов по оси Z не равны нулю. Таким образом остается только найти условие при котором:

Получили скалярное уравнение, которое можно сократить:


Заметим, что модули r 1 и r 2 – это, по сути, координаты точек подвеса грузов m1 и m2 относительно начала оси X , которое (точку x = 0 ) мы выбрали в точке крепления шарнира рычага. Для того, чтобы выполнялось условие равновесия (107), r 1 и r 2 должны быть разных знаков
Что же означает эта, теперь уже скалярная, формула равновесия рычага?
1. Координаты расположения точек подвеса грузов должны быть расположены по разные стороны от точки шарнира рычага.
2. Массы подвешенных грузов должны быть обратно пропорциональны расстояниям от точки подвеса поперечины до точек подвеса грузов. Или по-другому – длина рычагов должна быть обратно пропорциональна массам подвешенных грузов.
Источник



