
Пуск, реверсирование и торможение двигателей постоянного тока
 Пуск двигателя постоянного тока прямым включением его на напряжение сети допустим только для двигателей небольшой мощности. При этом пик тока в начале пуска может быть порядка 4 — 6-кратного номинального. Прямой пуск двигателей постоянного тока значительной мощности совершенно недопустим, потому что начальный пик тока здесь будет равен 15 — 50-кратному номинальному. Поэтому пуск двигателей средних и больших мощностей производят при помощи пускового реостата, который ограничивает ток при пуске до допустимых по коммутации и механической прочности значений.
Пуск двигателя постоянного тока прямым включением его на напряжение сети допустим только для двигателей небольшой мощности. При этом пик тока в начале пуска может быть порядка 4 — 6-кратного номинального. Прямой пуск двигателей постоянного тока значительной мощности совершенно недопустим, потому что начальный пик тока здесь будет равен 15 — 50-кратному номинальному. Поэтому пуск двигателей средних и больших мощностей производят при помощи пускового реостата, который ограничивает ток при пуске до допустимых по коммутации и механической прочности значений.
Пусковой реостат выполняется из провода или ленты с высоким удельным сопротивлением, разделенных на секции. Провода присоединяются к медным кнопочным или плоским контактам в местах перехода от одной секции к другой. По контактам перемещается медная щетка поворотного рычага реостата. Реостаты могут иметь и другое выполнение. Ток возбуждения при пуске двигателя с параллельным возбуждением устанавливается соответствующим нормальной работе, цепь возбуждения включается прямо на напряжение сети, чтобы не было уменьшения напряжения, обусловленного падением напряжения в реостате (см. рис. 1).
Необходимость иметь нормальный ток возбуждения связана с тем, что при пуске двигатель должен развивать возможно больший допустимый момент Мэм, необходимый для обеспечения быстрого разгона. Пуск двигателя постоянного тока производится при последовательном уменьшении сопротивления реостата, обычно — путем перевода рычага реостата с одного неподвижного контакта реостата на другой и выключения секций; уменьшение сопротивления может производиться и путем замыкания накоротко секций контакторами, срабатывающими по заданной программе.
При пуске вручную или автоматически ток изменяется от максимального значения, равного 1,8 —2,5-кратному номинальному в начале работы при данном сопротивлении реостата, до минимального значения, равного 1,1 — 1,5-кратному номинальному в конце работы и перед переключением на другое положение пускового реостата. Ток якоря после включения двигателя при сопротивлении реостата rп составляет
где Uс — напряжение сети.
После включения начинается разгон двигателя, при этом возникает противо-ЭДС Е и уменьшается ток якоря. Если учесть, что механические характеристики n = f1(M н) и n = f2 (I я ) практически линейны, то при разгоне увеличение скорости вращения будет происходить по линейному закону в зависимости от тока якоря (рис. 1).
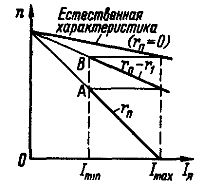
Рис. 1. Диаграмма пуска двигателя постоянного тока
Пусковая диаграмма (рис. 1) для различных сопротивлений в цепи якоря представляет собой отрезки линейных механических характеристик. При уменьшении тока якоря IЯ до значения Imin выключается секция реостата с сопротивлением r1 и ток возрастает до значения
где E1 — ЭДС в точке А характеристики; r1—сопротивление выключаемой секции.
Затем снова происходит разгон двигателя до точки В, и так далее вплоть до выхода на естественную характеристику, когда двигатель будет включен прямо на напряжение Uc. Пусковые реостаты рассчитаны по нагреву на 4 —6 пусков подряд, поэтому нужно следить, чтобы в конце пуска пусковой реостат был полностью выведен.
При остановке двигатель отключается от источника энергии, а пусковой реостат полностью включается — двигатель готов к следующему пуску. Для устранения возможности появления больших ЭДС самоиндукции при разрыве цепи возбуждения и при ее отключении цепь может замыкаться на разрядное сопротивление.
В регулируемых приводах пуск двигателей постоянного тока производится путем постепенного повышения напряжения источника питания так, чтобы ток при пуске поддерживался в требуемых пределах или сохранялся в течение большей части времени пуска примерно неизменным. Последнее можно осуществить путем автоматического управления процессом изменения напряжения источника питания в системах с обратными связями.
Пуск двигателей постоянного тока с последовательным возбуждением производится также при помощи пусковых устройств. Пусковая диаграмма представляет собой отрезки нелинейной механической характеристики для различных сопротивлений цепи якоря. Пуск при относительно небольших мощностях может выполняться вручную, а при больших — путем замыкания накоротко секций пускового реостата контакторами, которые срабатывают при управлении вручную или автоматически.
Реверсирование — изменение направления вращения двигателя — производится путем изменения направления действия вращающего момента. Для этого требуется изменить направление магнитного потока двигателя постоянного тока, т. е. переключить обмотку возбуждения или якорь, при этом в якоре будет протекать ток другого направления. При переключении и цепи возбуждения, и якоря направление вращения останется прежним.
Обмотка возбуждения двигателя параллельного возбуждения имеет значительный запас энергии: постоянная времени обмотки составляет секунды для двигателей больших мощностей. Значительно меньше постоянная времени обмотки якоря. Поэтому для того чтобы реверсирование проходило возможно быстрее, производится переключение якоря. Только там, где не требуется быстродействия, можно выполнять реверсирование путем переключения цепи возбуждения.
Реверсирование двигателей последовательного возбуждения можно производить переключением или обмотки возбуждения, или обмотки якоря, так как запасы энергии в обмотках возбуждения и якоря невелики и их постоянные времени относительно малы.
При реверсировании двигателя с параллельным возбуждением якорь сперва отключается от источника питания и двигатель механически тормозится или переключается для торможения. После окончания торможения якорь переключается, если он не был переключен в процессе торможения, и выполняется пуск при другом направлении вращения.
В такой же последовательности производится и реверсирование двигателя последовательного возбуждения: отключение — торможение — переключение — пуск в другом направлении. У двигателей со смешанным возбуждением при реверсировании следует переключить якорь либо последовательную обмотку вместе с параллельной.
Торможение необходимо для того, чтобы уменьшить время выбега двигателей, которое при отсутствии торможения может быть недопустимо велико, а также для фиксации приводимых механизмов в определенном положении. Механическое торможение двигателей постоянного тока обычно производится при наложении тормозных колодок на тормозной шкив. Недостатком механических тормозов является то, что тормозной момент и время торможения зависят от случайных факторов: попадания масла или влаги на тормозной шкив и других. Поэтому такое торможение применяется, когда не ограничены время и тормозной путь.
В ряде случаев после предварительного электрического торможения при малой скорости можно достаточно точно произвести остановку механизма (например, подъемника) в заданном положении и зафиксировать его положение в определенном месте. Такое торможение применяется и в аварийных случаях.
Электрическое торможение обеспечивает достаточно точное получение требуемого тормозящего момента, но не может обеспечить фиксацию механизма в заданном месте. Поэтому электрическое торможение при необходимости дополняется механическим, которое входит в действие после окончания электрического.
Электрическое торможение происходит, когда ток протекает согласно с ЭДС двигателя. Возможны три способа торможения.
Торможение двигателей постоянного тока с возвратом энергии в сеть. При этом ЭДС Е должна быть больше напряжения источника питания UС и ток будет протекать в направлении ЭДС, являясь током генераторного режима. Запасенная кинетическая энергия будет преобразовываться в электрическую и частично возвращаться в сеть. Схема включения показана на рис. 2, а.
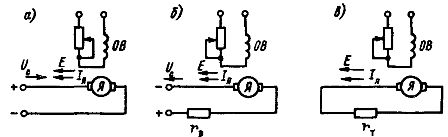
Рис. 2. Схемы электрического торможения двигателей постоянного тока: я — с возвратом энергии в сеть; б — при противовключении; в — динамическое торможение
Торможение двигателя постоянного тока может быть выполнено, когда уменьшается напряжение источника питания так, что Uc
Торможение при противовключении выполняется путем переключения вращающегося двигателя на обратное направление вращения. При этом ЭДС Е и напряжение Uc в якоре складываются, и для ограничения тока I следует включать резистор с начальным сопротивлением

где Imах — наибольший допустимый ток.
Торможение связано с большими потерями энергии.
Динамическое торможение двигателей постоянного тока выполняется при включении на зажимы вращающегося возбужденного двигателя резистора rт (рис. 2, в). Запасенная кинетическая энергия преобразуется в электрическую и рассеивается в цепи якоря как тепловая. Это наиболее распространенный способ торможения.

Схемы включения двигателя постоянного тока параллельного (независимого) возбуждения: а — схема включения двигателя, б — схема включения при динамическом торможении, в — схема для противовключения.
Если Вам понравилась эта статья, поделитесь ссылкой на неё в социальных сетях. Это сильно поможет развитию нашего сайта!
Подписывайтесь на наш канал в Telegram!
Просто пройдите по ссылке и подключитесь к каналу.
Не пропустите обновления, подпишитесь на наши соцсети:
Источник
Реверс электродвигателя — полное описание функций реверсирования
Реверс – это изменение направления вращения электродвигателя. Выполнить реверс можно изменив полярность приходящего на пускатель, питающего напряжения. Это могут быть регуляторы, используемые для двигателей постоянного тока.
Реверс можно выполнить, используя перемену чередования фаз в сети переменного тока. Это действие выполняется в автоматическом режиме при замене полярности сигнала задания, или после поступления определенной команды на нужный логический вход.
Реверс можно осуществить при помощи информации, которая передается по полевой шине, эта возможность входит в определенный набор стандартных функциональных способностей и свойственна большинству современных регуляторов, используемых в цепях переменного тока.

Рис№1. Тезус U(магнитный пускатель) с реверсивным блоком
Функция реверсирования
Для изменения направления двигателя изменяется полярность напряжения приходящего на якорь двигателя.
Основные методы реверсирования
В настоящее время, уже достаточно редко, используется контакторный способ.
Существует статический способ, он заключается в изменении полярности на выходе преобразователя в обмотке якоря или при изменении направления прохождения тока возбуждения. Для этого способа свойственно наличие большой постоянной времени обмотки возбуждения, что не всегда удобно.

Рис. №2. Реверсирование двигателя с помощью магнитного пускателя.
При управляемом торможении механизмов, обладающих высоким моментом инерции нагрузки, необходимо вырабатываемую электрической машиной энергию, возвращать обратно в основную электрическую сеть.
Используя процесс торможения регулятор выступает в качестве инвертора, производимая энергия обладает отрицательным зарядом.. таким образом регулятор может осуществить две операции одна – реверс, другая – рекуперативное торможение. Регулятор оснащается двумя мостами, которые подключены встречно-параллельно.
Используемые мосты инвертируют напряжение и ток.

Рис.№3. Реверс асинхронного электродвигателя с прямым частотным преобразователем; а) скорость и составляющие вектора статорных токов АД, б) фазные напряжения электрической сети и ток нагрузки.
Реверс может осуществляться преобразователем частоты, используемым для асинхронных электрических двигателей.
Управление реверсированием выполняется с помощью векторного управления в замкнутой системе с использованием датчика обратной связи. С его помощью производится независимое управление составляющими тока Id и Iq, они служат для определения потока и вращающегося момента двигателя. Управление асинхронным двигателем аналогично проведению операций по управлению и регулированию двигателем постоянного тока.

Рис.№4. Функциональная схема регулятора скорости с векторным управлением и датчиком обратной связи.
Для осуществления функции реверса, на логическом входе регулятора предназначенного для выполнения этой команды появляется внешний сигнал. Он изменяет порядок коммутации силовых ключей инвертора и реверса двигателя. Реверс можно выполнять в нескольких вариантах.
- Вариант №1: осуществление действия с помощью противовключения, при стремительном изменении очередности переключения транзисторных ключей.
При изменении чередования фаз на двигателе, находящемся в работе, происходит изменение вращения поля. В результате этого появляется большое скольжение, что создает резко-нарастающее тока ПЧ (преобразователя частоты) до самого большого значения (внутреннее ограничение тока ПЧ). При большом скольжении малый тормозной момент и внутренний регулятор ПЧ уменьшат задание скорости. При достижении электродвигателем нулевой скорости, происходит осуществление реверса, который соответствует кривой разгона. Лишняя энергия, не затраченная на трение и на нагрузку, рассеивается в роторе.
- Вариант №2: изменение направления вращения электрического поля с управлением периода скорости замедления и без него.
Вращающий момент механизма прямо противоположен моменту двигателя и превышает его по модулю, то есть естественное замедление происходит быстрее во много раз, чем кривая замедления, которую установил регулятор. Значение скорости постепенно снижается и происходит смена направления вращения.
При вращающем моменте, когда естественное торможение меньше установленного регулятором, двигатель начинает работать в состоянии рекуперативного торможения и возвращает энергию преобразователю. Диодные мосты не дают энергии пройти в сеть, конденсаторы фильтра заряжаются, величина напряжения увеличивается и включается устройство безопасности, предохраняющее от выделения энергии.
Для того чтобы предотвратить перенапряжение, через тормозной ключ присоединяют тормозное сопротивление к конденсаторному блоку. Тормозной момент ограничивается емкостью в звене постоянного тока преобразователя, значение скорости падает и происходит смена вращения. Разные модификации резисторов на разные номиналы обеспечивают соответствие мощности двигателя и рассеиваемой энергии. В подавляющем большинстве случаев тормозной ключ в моделях расположен в самом регуляторе.
Наличие тормозного резистора свойственно для регуляторов, предназначенных для обеспечения управляемого торможения, этот метод относится к самым экономически выгодным. С его помощью двигатель может замедлять вращение до самой остановки движения, не меняя направление рабочего вращения.
- Вариант №3: длительный период работы в режиме торможения.
Этот вариант характерен для испытательных стендов. Выделяющаяся энергия обладает слишком большой величиной, резисторы не могут справиться с ее рассеиванием, потому что произойдет повышение температуры. Для этого предусмотрены системы, которые дают возможность вернуть энергию обратно в электрическую сеть. В этом случае диодный мост не используется, вместо него применяют полупроводниковый мост, изготовленный из IGBT-транзисторов. Выполнение рабочих функций определено с помощью многоуровневого управления, оно дает возможность получить токовую характеристику, приближенную к форме чистого синуса.
Пишите комментарии, дополнения к статье, может я что-то пропустил. Загляните на карту сайта, буду рад если вы найдете на моем сайте еще что-нибудь полезное.
Источник



