
- Регулирование скорости электроприводов.
- Электрооборудование и автоматизация сельскохозяйственных агрегатов — Регулирование скорости в электроприводах
- Содержание материала
- ОСНОВНЫЕ ПОКАЗАТЕЛИ РЕГУЛИРОВАНИЯ СКОРОСТИ
- БЛОГ ЭЛЕКТРОМЕХАНИКА
- 01.11.2012
- Регулирование частоты вращения, пуск, реверсирование и торможение электродвигателей постоянного тока
Регулирование скорости электроприводов.
Для обеспечения рационального хода технологических процессов обеспечили наиболее эффективное использование производственных механизмов и оптимизировали режимы их работы, уменьшили потребление электрической энергии, применением регулирования скорости движения механизмов.
Для регулирования скорости движения рабочего органа существуют две возможности:
Изменение угловой скорости двигателя.
Изменение передаточного числа механических передач, установленных между двигателем и механизмом.
При регулировании скорости механическим способом отсутствует плавность регулирования, да и техническая реализация регулирования относительно сложна и не надежна. В настоящее время в подавляющем большинстве случаев регулирование скорости рабочего органа производится путем изменения скорости электродвигателей, работающих в регулируемом электроприводе.
Под регулированием скорости электродвигателя понимаем – целенаправленное ее изменение независимо от момента на валу двигателя в соответствии с требованиями, которые предъявляются к закону движения рабочего органа механизма. Иными словами это принудительное управление системой скорости, исходя их требований технологического процесса при подаче управляющего сигнала на вход системы.
Под регулируемым электроприводом понимаем – электропривод, обеспечивающий плавное с необходимой точностью регулирование координат скорости и момента в заданном диапазоне.
В естественной схеме включения двигатель не может обеспечить регулирования параметров движения. Поэтому для создания регулируемого электропривода необходим преобразователь электрической энергии. Регулируемые параметры преобразования энергии (напряжение, частота, форма тока, напряжения) удается получить для привода с заданными статическими и динамическими характеристиками. Применение регулируемого электропривода в составе технологических машин и агрегатах связано с одним из следующих обстоятельств:
Необходимо оперативное управление ходом технологического процесса (электроприводов кранов, прокатных станов).
Необходимо установить и точно выдерживать технологический режим (непрерывные прокатные станы, бумагоделательные машины).
Необходимость корректировки технологического процесса (питатели, дозаторы).
Автоматическое управление режимом обработки материала (станки с ЧПУ).
Необходимо оптимизировать технологический процесс по затратам электрической энергии (электропривода насосов, компрессоров, вентиляторов).
Способы изменения углов скорости двигателя следуют из анализа механических характеристик двигателя:
 — двигатель постоянного тока;
— двигатель постоянного тока;
 — двигатель переменного тока.
— двигатель переменного тока.
 .
.
Анализ этих формул показывает, что угловая скорость двигателя может изменяться, как изменением параметров силовой электрической цепи привода, числом пар полюсов цепи статора и т.д. и изменением магнитного потока, а также изменением параметров источника питания.
Регулирование скорости также возможно изменением момента сопротивления. Этот способ не применим, так как изменение момента вызывает отклонение регулируемой величины от заданного значения. Способы регулирования скорости электропривода связаные с изменением параметров электрических цепей двигателя называют параметрическим. Также различают непрерывный способ регулирования и импульсный способ регулирования. Под непрерывным способом регулирования понимают регулирование, когда регулируемые параметры или значения напряжения и частоты остаются постоянными для данного значения скорости. При импульсном регулировании регулируемые параметры цепи или источника питания периодически изменяются, отклоняясь от заданного значения.
Свойства регулирования электропривода оцениваются следующими показателями:
Диапазон регулирования скорости, под которым понимают отношение максимальной скорости к минимальной при заданном пределе изменения момента  .
.
Увеличение верхнего предела скорости ограниченно механической прочностью ротора или якоря двигателя, а для двигателя постоянного тока кроме этого верхний предел ограничивает коммутационную способность коллектора.
Нижний предел угловой скорости ограничивается необходимой точностью поддержания заданной скорости при возможности изменения момента статической нагрузки на валу двигателя.
Диапазон регулирования определяется отношением максимальной скорости к минимальной, которая определяется по среднему значению из заданного максимального и минимального его значений, т.е.
 .
.

 ;
; ;
; ;
; ;
; .
.
Вторым важным показателем регулирования скорости является точность регулирования.
Абсолютная статическая ошибка регулирования электропривода будет определятся как падение скорости
 .
.
Абсолютная ошибка одинакова для всех механических характеристик, т.е. постоянна во всем диапазоне регулирования. Относительная величина ошибки переменная, различна для всех механических характеристик. Она находится как отношение абсолютной ошибки к заданной скорости
 .
.
Нижний предел скорости wmin может ограничиваться заданной требуемой точностью и условие выполнения заданной точности:
 ;
; .
.
Плавность регулирования, которая характеризуется разностью двух последовательных значений скорости, которые представляют из себя ступени регулирования и, чем меньше эта разность, тем плавнее осуществляется регулирование скорости. Часто плавность характеризуется коэффициентом плавности регулирования, под которым понимают отношения двух степеней скоростей
 .
.
Наиболее плавное регулирование имеет место при коэффициенте плавности стремящимуся к единице w1. Такой результат возможен при регулировании скорости изменением напряжения и изменением частоты асинхронного двигателя.
При параметрическом регулировании плавности изменения скорости зависит от мощности двигателя, так как изменение параметров в силовой цепи связано с коммутационной аппаратурой и, для этих приводов большой и средней мощности, ее число должно быть ограничено.
Экономичность регулирования, которая будет тем выше чем меньше, первоначальные затраты необходимые для установки оборудования и эксплуатационные затраты. Эксплуатационные затраты оцениваются косвенным способом по величинам КПД и коэффициенту мощности.
Направление, в котором регулируется скорость, т.е. увеличение или уменьшение ее по отношению к номинальной скорости напрямую зависит от способа регулирования. При реостатном регулировании у двигателей постоянного тока или асинхронного двигателя с фазным ротором, регулирование осуществляется вниз от основной.
Допустимая нагрузка двигателя определяется нагревом обмоток двигателя. Условием полного использования электродвигателя является равенство тока двигателя номинальному. При различных характеристиках зависимости момента сопротивления и мощности механизмов от скорости, необходимо применение таких методов регулирования, при которых эквивалентный момент двигателя по нагреву при изменении скорости будет меняться по такому же закону, как и статический момент. Например, двигатель постоянного тока, если статический момент во всем диапазоне рабочей скорости постоянен, то надо применить метод регулирования вниз от номинальной скорости – это реостатный способ регулирования.
Если регулирование идет при постоянной мощности механизма, то регулирование идет вверх от номинальной скорости – изменением током возбуждения двигателя.
Для определения допустимой мощности следует найти его величину соответствующую номинальному току главной цепи.
Источник
Электрооборудование и автоматизация сельскохозяйственных агрегатов — Регулирование скорости в электроприводах
Содержание материала
Глава 9. РЕГУЛИРОВАНИЕ СКОРОСТИ В ЭЛЕКТРОПРИВОДАХ. ВЫБОР РЕЗИСТОРОВ
ОСНОВНЫЕ ПОКАЗАТЕЛИ РЕГУЛИРОВАНИЯ СКОРОСТИ
Регулированием скорости электропривода называют принудительное изменение скорости исполнительного органа энергетического машинного устройства. Изменяется скорость при дополнительном воздействии на электродвигатель со стороны управляющего и преобразовательного устройств или при помощи специальных механических передач. В настоящее время чаще применяют электрическое регулирование. В этом случае упрощается кинематическая схема машинного агрегата, улучшаются технико-экономические показатели. Такой электропривод представляет собой более совершенную форму привода, способствующую автоматизации технологических процессов, повышению производительности машин, улучшению качества выпускаемой продукции.
Основными критериями, которыми руководствуются при выборе способа регулирования скорости, являются диапазон, плавность, экономичность регулирования и стабильность работы на заданной скорости.
Диапазон изменения скорости определяется отношением значений наибольшей и наименьшей скоростей при номинальной нагрузке двигателя.
Плавность регулирования характеризуется числом ступеней внутри диапазона регулирования: чем больше ступеней, тем больше плавность.
Экономичность регулирования оценивается по приведенным затратам, которые зависят в основном от потерь энергии и капитальных вложений.
Стабильность работы определяется жесткостью механических характеристик двигателя.
Регулируемые приводы применяют в кормоприготовительных агрегатах и на раздаче корма, в сенажной башне для равномерного разбрасывания травяной массы и вентиляционных установках животноводческих помещений, в металлорежущих станках и испытательных установках ремонтных предприятий. Область применения их с каждым годом расширяется.
Источник
БЛОГ ЭЛЕКТРОМЕХАНИКА
Блог судового электромеханика. Электроника, электромеханика и автоматика на судне. Обучение и практика. В помощь студентам и специалистам
01.11.2012
Регулирование частоты вращения, пуск, реверсирование и торможение электродвигателей постоянного тока
Регулирование частоты вращения. Частоту вращения электродвигателей постоянного тока регулируют: введением резисторов в цепь якоря двигателя; изменением магнитного потока; изменением напряжения, приложенного к якорю электродвигателя.
В зависимости от способа регулирования частоты вращения получаются различные искусственные механические характеристики.
При введении резисторов в цепь якоря у двигателей с независимым и параллельным возбуждением магнитный поток не изменяется, следовательно, остается постоянной частота вращения идеального холостого хода nx, но значение сопротивления вводимого резистора оказывает большое влияние на наклон механической характеристики, так как возрастает угловой коэффициент:

Рис. 2.3. Механические характеристики электродвигателя с параллельным возбуждением
Изменение сопротивления цепи якоря для двигателя с последовательным возбуждением приведет к смещению характеристики вниз в сторону уменьшения n.
Магнитный поток электродвигателей можно изменить введением дополнительного резистора в цепь обмотки возбуждения, причем уменьшаются ток возбуждения и магнитный поток двигателя.
Изменение магнитного потока приводит к увеличению частоты вращения идеального холостого хода и изменению наклона механической характеристики у двигателей с независимым, параллельным и смешанным возбуждением.
Действительно, если Ф = Ф0, то для естественной характеристики
Таким образом, искусственная механическая характеристика, полученная при введении резистора в цепь обмотки возбуждения двигателя, располагается выше естественной (характеристика 2), частота вращения идеального холостого хода и наклон характеристики увеличиваются.
Изменение питающего цепь якоря напряжения при неизменном напряжении в цепи независимой обмотки возбуждения приводит у двигателей с независимым возбуждением к изменению частоты вращения идеального холостого хода при неизменном наклоне характеристики.

Следовательно, искусственная характеристика расположится ниже естественной и будет параллельна ей (характеристика 3). У двигателя, имеющего смешанное возбуждение, искусственная характеристика также будет ниже естественной.
Анализируя полученные механические характеристики электродвигателей постоянного тока, можно установить, что при одном и том же моменте на валу электродвигателя частота вращения его на разных характеристиках будет различной. Поэтому частоту вращения электродвигателей регулируют способами, используемыми для получения искусственных характеристик. Различают параметрическое и импульсное регулирование.
При параметрическом способе изменяется какой-либо параметр, который далее остается неизменным. Импульсное регулирование характеризуется периодическим ступенчатым изменением какого-либо параметра с определенной частотой.
Каждому из параметрических способов присущи свои особенности, определившие область их применения.
Введение резистора в цепь якоря приводит к уменьшению частоты вращения, причем эффективность регулирования тем больше, чем больше нагружен двигатель. Способ не экономичен из-за больших потерь энергии в дополнительном резисторе, но все же используется вследствие его простоты.
Введение резистора в цепь обмотки возбуждения приводит к увеличению частоты вращения. Этот способ экономичен, так как ток возбуждения составляет 2—5 % тока якоря и потери в резисторе невелики. Однако этот способ не позволяет получить частоту вращения двигателя меньше номинальной.
Изменение приложенного к якорю напряжения — наиболее удачный способ регулирования. Он экономичен и допускает регулирование частоты вращения в достаточно широких пределах при любых значениях нагрузки, но требует автономных источников питания с широким диапазоном изменения напряжения. Поэтому его целесообразно применять для электроприводов с частыми пусками и большим диапазоном регулирования частоты вращения электродвигателя (рулевые электроприводы, электроприводы оперативных лебедок земснарядов, гребные электрические установки и т.п.). Автономным источником питания может служить генератор постоянного тока с независимым возбуждением. Напряжение можно регулировать с помощью управляемого выпрямителя или магнитного усилителя.
Из импульсных способов регулирования двигателей постоянного тока наиболее широкое распространение получил способ изменения времени включения приложенного к якорю напряжения при постоянной частоте включения. Этот способ называется широтно-импульсным. Среднее значение приложенного к якорю напряжения

Изменяя tp при постоянном Т (изменяя скважность), регулируют среднее значение приложенного к якорю двигателя напряжения и частоту вращения электродвигателя. Частоту включения обычно выбирают в пределах 500—1000 Гц. Возможен другой способ импульсного регулирования, когда время включения tр остается постоянным, а период Т изменяется. Такой способ принято называть частотно-импульсным.
Импульсное регулирование электродвигателей постоянного тока является перспективным для тех электроприводов, для которых применяется регулирование изменением приложенного к якорю напряжения. Основным недостатком этого способа является большое число включений, приводящих к появлению больших переходных токов и требующих специальной аппаратуры.
Пуск электродвигателей постоянного тока. Как известно из курса электротехники, вращающий момент электродвигателя при пуске

Пусковой ток может значительно превышать номинальный ток двигателя из-за отсутствия противо-э. д. с. в момент пуска.
При пуске все дополнительные резисторы в цепях независимой и параллельной обмоток возбуждения должны быть введены и последовательная обмотка не шунтирована.
Отечественная промышленность изготовляет электродвигатели, пусковой ток которых по условиям коммутации должен удовлетворять неравенству Iя.п≤2,5Iя.ном.
При этом наибольший пусковой момент двигателей с независимым и параллельным возбуждением при Ф = const будет также Мп≤2,5Мном.
При таком же пусковом токе у двигателей со смешанным и последовательным возбуждением пусковой момент будет несколько больше вследствие увеличения магнитного потока, создаваемого последователь ной обмоткой, по сравнению с номинальным.
По мере увеличения частоты вращения двигателя растет противо- э.д.с., что приводит к уменьшению тока якоря
следовательно, будет уменьшаться вращающий момент двигателя.
Для обеспечения наиболее быстрого разгона двигателя необходимо поддерживать при пуске момент и ток якоря в определенных пределах.
Различают следующие способы пуска электродвигателей постоянного тока: прямой, с ограничением пусковых токов вследствие изменения сопротивления цепи якоря и импульсный.
Прямой пуск осуществляется непосредственно включением двигателя на полное напряжение сети при отсутствии добавочных элементов в цепях якоря и возбуждения. Преимуществами этого способа являются его простота и отсутствие дополнительной пусковой аппаратуры, недостатком — большой ток в цепи якоря в первоначальный момент пуска, что вызывает искрение на коллекторе, возникновение значительного момента на валу двигателя и колебания напряжения в судовой сети. Прямой пуск применяют для двигателей постоянного тока мощностью не более 1,5 кВт.
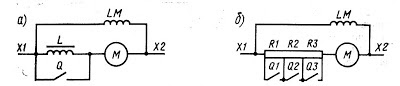
Рис. 2.4. Пуск двигателя постоянного тока
Параметрический пуск основан на предварительном изменении какого-либо параметра двигателя, ограничивающего пусковой ток, с последующим его приведением в процессе пуска к значению соответствующему номинальному режиму.
Для двигателей небольшой мощности применяют пуск с помощью реактора L, включенного последовательно в цепь якоря двигателя (рис. 2.4, а). При правильно подобранной индуктивности реактора время нарастания тока, определяемое электромагнитной постоянной времени электрической цепи,
соизмеримо с временем разгона электродвигателя, что значительно снижает пик пускового тока. Недостатками этого способа являются большие габаритные размеры и масса пускового реактора.
Наибольшее применение получил реостатный способ пуска, при этом способе в цепь якоря для ограничения пусковых токов включают дополнительный реостат (рис. 2.4, б), состоящий из трех-четырех резисторов. По мере разгона электродвигателя секции реостата поочередно закорачивают.
В некоторых случаях пользуются способом пуска, основанным на ступенчатом или плавном изменении напряжения, приложенного к якорю двигателя, от нуля до номинального значения. Этот способ возможен при питании якоря электродвигателя от отдельного источника с регулируемым напряжением. В качестве такого источника могут быть использованы генератор постоянного тока с независимым возбуждением, регулируемый трансформатор с выпрямителем, трансформатор с управляемым выпрямителем.
При импульсном пуске, так же как и при импульсном регулировании частоты вращения, может быть использован как широтно-импульсный, так и частотно-импульсный способ. В том и другом случае пуск осуществляется изменением скважности от нуля до номинального значения.
Реверсирование электродвигателей постоянного тока. Реверсирование— изменение направления вращения на противоположное. Для реверсирования необходимо изменить направление вращающего момента М = СмФIя, что возможно осуществить изменением направления тока в якоре электродвигателя или изменением направления магнитного потока путем изменения направления тока в обмотках возбуждения.
Для двигателей с независимым и параллельным возбуждением предпочтительнее первый способ по сравнению со вторым по сле-дующим причинам:
во-первых, при размыкании обмотки возбуждения, предшествующем ее переключению, возникает значительная э. д. с. самоиндукции
затрудняющая процесс коммутации и увеличивающая вероятность пробоя изоляции;
во-вторых, при реверсировании двигатель сначала необходимо остановить, а затем он начинает вращаться в обратную сторону. Но уменьшение магнитного потока вызовет не уменьшение, а увеличение частоты вращения.
Для двигателей со смешанным возбуждением реверсирование изменением направления магнитного потока еще более затруднено по сравнению с двигателем с параллельным возбуждением, так как у него необходимо переключать две обмотки возбуждения. Для двигателей с последовательным возбуждением оба способа равноценны.
Торможение электродвигателей постоянного тока. При режиме торможения электромагнитный момент на валу электродвигателя направлен в сторону, противоположную направлению вращения.
Режимы торможения используются, когда необходимо: остановить электропривод, вращающийся по инерции; остановить электропривод, вращающийся под действием момента, создаваемого рабочей машиной, например: под действием опускаемого подъемным краном груза; замедлить вращение электропривода при воздействии момента, создаваемого рабочей машиной.
Чтобы осуществить режим торможения электродвигателя, нужно изменить направление вращающего момента на его валу, при этом двигатель переходит в генераторный режим работы. В зависимости от использования энергии различают три вида торможения: рекуперативное, динамическое и противовключением. Рекуперативное торможение сопровождается возвратом энергии в питающую сеть. При динамическом торможении и торможении противовключением энергия превращается в тепловую в элементах цепи якоря двигателя.
Торможение с отдачей энергии в сеть, или рекуперативное торможение, наступает, тогда, когда электродвигатель под действием момента рабочей машины (идущий под уклон железнодорожный состав, опускающийся на подъемном кране груз) разгоняется до частоты вращения, превышающей частоту вращения идеального холостого хода. В этом случае э.д.с. якоря будет больше напряжения в сети, ток изменит свое направление и машина будет работать в режиме генератора, отдавая энергию в сеть. При этом направление вращения двигателя не изменится. Механическая характеристика двигателя с параллельным возбуждением О (рис. 2.5) при торможении с отдачей энергии в сеть будет являться продолжением характеристики

Рис. 2.5. Механические характеристики двигателя постоянного тока при рекуперативном торможении
в область отрицательных моментов. Область режима торможения обозначена цифрой II, область двигательного режима — цифрой I.
У двигателей со смешанным возбуждением при переходе в режим торможения ток в последовательной обмотке меняет свое направление, и поэтому она противодействует параллельной обмотке, размагничивая машину и уменьшая момент торможения (штриховая линия). Во избежание этого последовательную обмотку закорачивают или отключают (характеристика I).
Двигатели с последовательным возбуждением не могут работать в режиме торможения с отдачей энергии в сеть, так как с увеличением частоты вращения ток двигателя уменьшается и он размагничивается. Его э.д.с. никогда не может быть больше напряжения в сети.
Динамическое торможение осуществляют отключением якоря от сети и замыканием его на резистор. Различают два вида динамического торможения: с независимым возбуждением и с самовозбуждением.

Рис. 2.6. Схемы включения и механические характеристики двигателей при динамическом торможении
При торможении двигателей с независимым и параллельным возбуждением применяют торможение с независимым возбуждением (рис. 2.6, а).
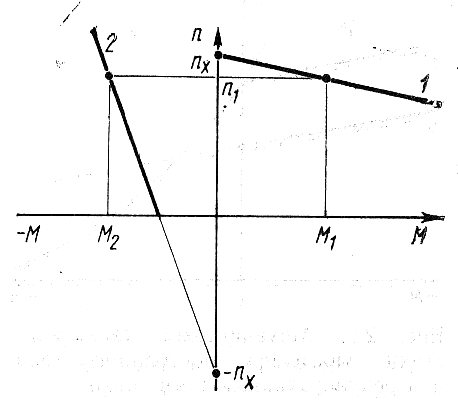
Рис. 2.7. Механическая характеристика двигателя постоянного тока с параллельным возбуждением при торможении противовключением
В этом случае якорь Двигателя отключается от питающей сети и включается на тормозной резистор R1, обмотка возбуждения остается включенной в сеть.
У двигателя со смешанным возбуждением последовательная обмотка отключается или закорачивается.
Торможение двигателя с последовательным возбуждением при питании обмотки возбуждения от сети (рис. 2.6, б) более эффективно, чем торможение с самовозбуждением (рис. 2.6, в), однако для ограничения тока в обмотке необходимо ее подключать через дополнительный резистор R2, мощность рассеяния которого должна равняться мощности электродвигателя
Уравнение механической характеристики при динамическом торможении (при U = 0)
При Ф = const (независимое возбуждение) оно представляет собой уравнение прямой линии.
При самовозбуждении в связи с изменением магнитного потока характеристика искривляется, а при некотором значении частоты вращения самовозбуждение и торможение двигателя прекращаются.
На рис. 2.6, г показаны механические характеристики для динамического торможения: 0 — для торможения с независимым возбуждением; 1 — для торможения с самовозбуждением. Штриховой линией показан участок, на котором торможение прекращается.
Торможение противовключением производится быстрым реверсированием двигателя по ходу, когда якорь по инерции продолжает вращаться в одном направлении, а обмотки включаются на противоположное. При этих режимах знаки пх и п противоположны, э. д. с. якоря двигателя совпадает по направлению с напряжением и ток якоря
так как в начале торможения Е ≈ U, сопротивление резистора R1 необходимое для ограничения тока до допустимых пределов, должно быть примерно в 2 раза больше пускового сопротивления двигателя. Механическая характеристика при этом способе торможения двигателя с параллельным возбуждением приведена на рис. 2.7 (характеристика 2).
Если двигатель предварительно работал с М1>0 и n1>0 на характеристике 1, то при торможении противовключением уравнение механической характеристики будет

При быстром реверсировании частота вращения двигателя не успеет измениться и режим торможения будет соответствовать точке с моментом М2 и частотой вращения n1 на характеристике 2.
Из рис. 2.7 видно, что при торможении противовключением в момент остановки двигателя (n = 0) момент на его валу не обращается в нуль. Поэтому после остановки двигатель может начать вращаться в обратную сторону. Во избежание этого двигатель после остановки должен быть отключен от сети.
Источник



