
- Способ регулирования скорости асинхронного двигателя изменением числа пар полюсов
- § 110. Регулирование скорости вращения, реверсирование и торможение асинхронных двигателей
- Регулирование частоты вращения асинхронного двигателя переключение числа пар полюсов
- Регулирование частоты вращения асинхронного двигателя изменением числа полюсов в обмотке статора
Способ регулирования скорости асинхронного двигателя изменением числа пар полюсов




§ 110. Регулирование скорости вращения, реверсирование и торможение асинхронных двигателей
Скорость вращения ротора асинхронного двигателя определяется выражением
Отсюда следует, что скорость асинхронного двигателя можно регулировать изменением какой-либо их трех величин:
числа пар полюсов p; частоты f1 тока питающей сети; скольжения S.
Изменение числа полюсов электродвигателя. Для возможности изменения числа пар полюсов двигателя статор его выполняют либо с двумя самостоятельными трехфазными обмотками, либо с одной трехфазной обмоткой, которую можно пересоединять на различные числа полюсов.
На рис. 265, а схематически показаны две катушки одной фазы, соединенные последовательно. Из чертежа видно, что катушки создают четыре магнитных полюса.
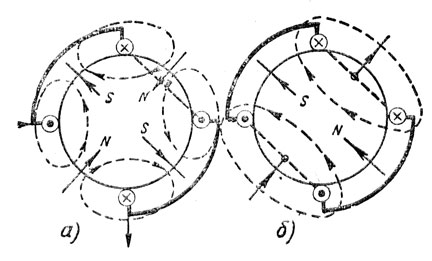
Рис. 265. Изменение числа пар полюсов на статоре электродвигателя
Те же две катушки, соединенные параллельно между собой, создадут уже только два полюса (рис. 265, б). Пересоединение обмоток статора производится при помощи специального аппарата — контроллера. При этом способе регулировка скорости вращения двигателя совершается скачками.
На практике встречаются двигатели, синхронные скорости вращения (n0) которых могут быть равны 3000, 1500, 1000 и 750 оборотов в минуту.
Регулировку скорости вращения двигателя путем изменения числа полюсов можно производить только у асинхронных двигателей с короткозамкнутым ротором. Ротор с короткозамкнутой обмоткой может работать при разных числах полюсов магнитного поля. Наоборот, ротор двигателя с фазной обмоткой может нормально работать лишь при определенном числе полюсов поля статора. Иначе обмотку ротора также пришлось бы переключать, что внесло бы большие усложнения в схему двигателя.
Изменение частоты переменного тока. При этом способе частоту переменного тока, подводимого к обмотке статора двигателя, изменяют при помощи специального преобразователя частоты. Регулировку изменения частоты тока выгодно производить, когда имеется большая группа двигателей, требующих совместного плавного регулирования скорости вращения (рольганги, текстильные станки и т. п.). Этот способ регулирования скорости мало распространен ввиду сложности его осуществления.
Введение сопротивления в цепь ротора. Первые два способа регулировки скорости вращения асинхронного двигателя требуют или специального исполнения двигателя, или наличия специального преобразователя частоты и поэтому широкого распространения не получили.
Третий способ регулировки скорости вращения асинхронных двигателей состоит в том, что во время работы двигателя в цепь обмотки ротора вводят сопротивление регулировочного реостата.
Рассматривая рис. 256, на котором построены естественная и реостатная механические характеристики асинхронного двигателя, мы видим, что с увеличением активного сопротивления цепи ротора возрастает величина скольжения S, соответствующая заданному значению вращаемого момента М (величина вращающего момента, развиваемого двигателем, равна моменту сопротивления на валу двигателя). Таким образом, вводя дополнительно активное сопротивление в цепь фазного ротора, мы увеличиваем скольжение S и, следовательно, снижаем скорость вращения ротора n. Такой способ регулирования применим только для асинхронных двигателей с фазным ротором.
Регулировочный реостат включают в цепь ротора так же, как и пусковой реостат. Разница между пусковым и регулировочным реостатом состоит в том, что регулировочный реостат рассчитан на длительное прохождение тока. Для двигателей, у которых производится регулировка скорости вращения путем изменения сопротивления в цепи ротора, пусковой и регулировочный реостаты объединяются в один пускорегулировочный реостат.
Недостатком этого способа регулирования является то, что в регулировочном реостате происходит значительная потеря мощности, тем большая, чем шире регулировка скорости вращения двигателя. На рис. 266 изображена схема включения асинхронного двигателя с пускорегулировочным реостатом.
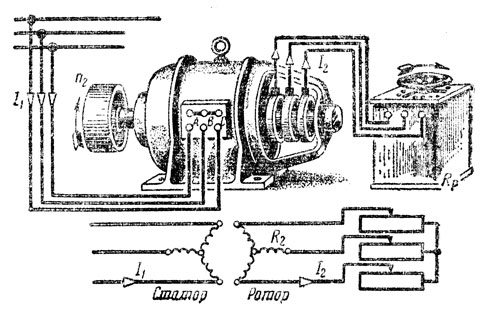
Рис. 266. Схема включения асинхронного двигателя с пускорегулировочным реостатом
Реверсирование асинхронных двигателей. Для изменения направления вращения (реверсирование) асинхронного двигателя следует поменять местами два любых провода из трех, идущих к обмоткам статора двигателя. При этом меняется направление вращения магнитного поля статора и двигатель станет вращаться в другую сторону. Реверсирование двигателя может быть произведено при помощи переключателя (перекидного рубильника), магнитного пускателя и других устройств.
Торможение асинхронных двигателей. В условиях эксплуатации нередко возникает необходимость торможения двигателя с целью ускорить его остановку.
Торможение электрических двигателей может быть механическим, электромеханическим и электрическим. Электромеханическое торможение производится при помощи ленточного или колодочного тормоза, действующего на тормозной шкив, закрепленный на валу двигателя. Ослабление ленты или колодок осуществляется тормозным электромагнитом, обмотка которого соединена параллельно с обмоткой статора двигателя.
Если при работе двигателя переключить две любые фазы, то при этом двигатель начнет развивать вращающий момент, направленный в обратную сторону. Вращение ротора замедляется. Когда скорость вращения приближается к нулю, следует отключить двигатель от сети, в противном случае ротор под действием развиваемого момента начнет вращаться в противоположном направлении. Применяются и другие способы электрического торможения асинхронных двигателей.
Источник
Регулирование частоты вращения асинхронного двигателя переключение числа пар полюсов




![]()
![]()
Ступенчатое регулирование скорости можно осуществить, используя специальные многоскоростные асинхронные двигатели с короткозамкнутым ротором.
Из выражения nо = 60f/р следует, что при изменении числа пар полюсов р получаются механические характеристики с разной частотой вращения nо магнитного поля статора. Так как значение р определяется целыми числами, то переход от одной характеристики к другой в процессе регулирования носит ступенчатый характер.
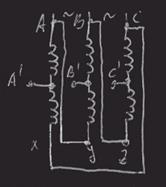
Существует два способа изменения числа пар полюсов. В первом случае в пазы статора укладывают две обмотки с разным числом полюсов. При изменении скорости к сети подключается одна из обмоток. Во втором случае обмотку каждой фазы составляют из двух частей, которые соединяют параллельно или последовательно. При этом число пар полюсов изменяется в два раза.
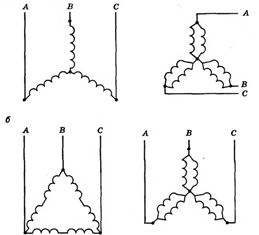
Рис. 7. Схемы переключения обмоток асинхронного двигателя: а — с одинарной звезды на двойную; б — с треугольника на двойную звезду
Регулирование скорости путем изменения числа пар полюсов экономично, а механические характеристики сохраняют жесткость. Недостатком этого способа является ступенчатый характер изменения частоты вращения асинхронного двигателя с короткозамкнутым ротором. Выпускаются двухскоростные двигатели с числом полюсов 4/2, 8/4, 12/6. Четырехскоростной электродвигатель с полюсами 12/8/6/4 имеет две переключаемые обмотки.
21 Регулирование скорости асинхронного двигателя с короткозамкнутым ротором изменением числа пар полюсов
Этот способ регулирования скорости вытекает из формул:
n0 = 60f / p
ω = 2πf / p
Для того чтобы регулировать скорость вращения в статор должна быть уложена обмотка специальной конструкции, состоящая в каждой фазе из двух полуобмоток. Путем пересоединения этих полуобмоток можно получить разное число пар полюсов. Обмотки можно переключать с простой звезды на двойную звезду.

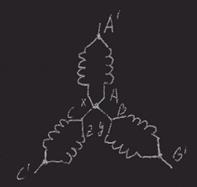
При переключении со звезды на двойную звезду число пар полюсов изменяется кратно двум. Мощность двигателя равна: P=M•ω.
При регулировании скорости путем переключения со звезды на двойную звезду, момент остается постоянным, следовательно, при изменении скорости вращения в два раза, мощность также будет изменяться в два раза.
Механические характеристики при таком переключении обмотки имеют вид:
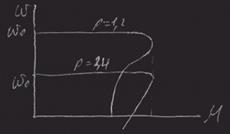
Регулирование скорости переключением со звезды на двойную звезду называется регулированием с постоянством момента.
Обмотку статора можно переключать с треугольника на двойную звезду.
При переключении с треугольника на двойную звезду число пар полюсов также меняется кратно двум. При этом регулирование производится с постоянством мощности, соответственно момент изменяется в два раза.
Двигатели с регулированием скорости изменением числа пар полюсов называются двухскоростными. Они были разработаны специально для электропривода металлорежущих станков, чтобы уменьшить габариты коробки скоростей. Для того чтобы еще больше расширить диапазон регулирования скоростей были разработаны трехскоростные асинхронные двигатели с короткозамкнутым ротором. У этих двигателей в пазы статора укладываются две обмотки. Одна обмотка с постоянным числом пар полюсов и вторая обмотка такой конструкции, чтобы в ней изменять число пар полюсов путем переключения.
Еще одним недостатком этого регулирования скорости можно считать необходимость использования специальных электродвигателей, габариты которых будут намного больше, чем у односкоростных асинхронных двигателей.
Источник
Регулирование частоты вращения асинхронного двигателя изменением числа полюсов в обмотке статора
Регулирование частоты вращения асинхронного двигателя изменением числа полюсов в обмотке статора обеспечивается благодаря изменению частоты вращения магнитного поля статора. Как следует из формулы (3), при неизменной частоте питающей сети частота вращения магнитного поля и определяемая ею частота вращения ротора изменяются обратно пропорционально числу полюсов. Так как число полюсов, фиксированное ступенями, может быть равно 2, 4, 6, 8, 10 и т. д., что при частоте питающей сети, равной 50 Гц, соответствует синхронной частоте вращения 3000, 1500, 1000, 750, 600 об/мин и т. д., то указанным способом может быть обеспечено только ступенчатое регулирование.
Изменение числа пар полюсов обычно достигается следующими способами:
1. На статоре двигателя укладываются две электрически не связанные между собой обмотки, имеющие разное число пар полюсов, например р1 и р2. При подключении одной из обмоток к сети переменного тока, например, с числом полюсов р2 асинхронный двигатель будет иметь синхронную частоту вращения, соответствующую данному числу полюсов (рис. 27, а):

Другая обмотка при этом обесточена. При необходимости получения другой частоты вращения n1 обмотка с числом полюсов р2 отключается и включается с числом полюсов р1. Такие асинхронные двигатели получили название двухобмоточных.
2. На статоре укладывается одна обмотка, допускающая переключение на разное число полюсов. Наиболее широко распространены две схемы переключения статорной обмотки двухскоростных двигателей: с треугольника на двойную звезду Д/УУ и со звезды на двойную звезду У/УУ (звезду с двумя параллельными ветвями).
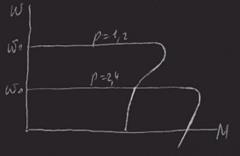
Схемы соединения обмоток Д/УУ применяются для получения примерно одинакового вращающего момента при обеих частотах вращения (рис. 27,а). Такие схемы применяются, например, у асинхронных двигателей привода компрессоров, металлорежущих станков и др. Схемы соединения обмоток У/УУ используются для приводов вентиляторов (рис. 27, б).

Рис. 27. Механические характеристики при регулировании частоты вращения асинхронных двигателей изменением числа пар полюсов при переключении статорной обмотки: а — треугольник (число пар полюсов p=p1) — двойная звезда (р=р2); б — звезда (p=р1) — двойная звезда (р=р2)
Кроме рассмотренных вариантов двухскоростных асинхронных двигателей нашли применение трехскоростные и четырехскоростные двигатели. В трехскоростных двигателях размещаются одна переключаемая и одна непереключаемая обмотка, а в четырехскоростных — две переключаемые обмотки, позволяющие получить четыре синхронные частоты вращения, например 3000/1500/1000/500 об/мин.
Двигатели с переключением числа пар полюсов, как правило, имеют короткозамкнутый ротор с обмоткой типа беличьей клетки. Такой ротор обеспечивает возможность работы без дополнительных пересоединений в его цепи. В случае фазного ротора в многоскоростных двигателях потребовалось бы производить переключения одновременно на статоре и роторе, что усложнило бы конструкцию ротора и эксплуатацию таких машин.
Электродвигатели с короткозамкнутым ротором могут иметь ряд специфических ненормальностей из-за неправильного соотношения числа пазов статора z1, ротора z2 и числа полюсов 2р.
Ненормальности заключаются в том, что двигатель может «прилипать», т. е. не приходить во вращение при подключении к сети, или «застревать», т. е., начав вращаться, останавливаться при некоторой частоте вращения, или при вращении сильно гудеть.
Во избежание указанных явлений должны быть выдержаны следующие соотношения:

где k — любое целое число от одного до четырех.
Здесь же следует заметить, что изменение числа полюсов может иметь место не только при регулировании частоты вращения асинхронного двигателя способом изменения его полюсности, но и при ремонте, связанном с изменением номинальной частоты вращения.
К положительным показателям многоскоростных асинхронных двигателей следует отнести экономичность и относительно большой диапазон регулирования частоты вращения ротора. Недостатком данного способа регулирования является указанная выше невозможность плавного изменения частоты вращения.
Как отмечалось, в рамках единой общепромышленной серии асинхронных двигателей 4А выпускается модификация многоскоростных двигателей, предназначенных для работы на двух, трех или четырех скоростях.
Однообмоточные двигатели выпускаются на следующие соотношения частот вращения: 1500/3000, 750/1500, 1000/1500, 750/1000, 500/1000 об/мин. Двухобмоточные (трехскоростные) имеют соотношения 1000/1500/3000, 750/1500/3000, 750/1000/1500 об/мин, двухобмоточные (четырехскоростные) —750/1000/1500/3000, 500/750/1000/1500 об/мин.
В обозначении многоскоростных двигателей приводят все числа полюсов, на которые переключаются обмотки. Например, четырехскоростной асинхронный двигатель на 500/750/1000/1500 об/мин (2р= 12/8/6/4) обозначается 4А200М12/8/6/4УЗ.
Источник



