
- Регулирование частоты вращения двигателей с параллельным возбуждением
- Регулирование частоты вращения электродвигателей
- Подписка на рассылку
- Методы регулирования частоты вращения электродвигателя
- Частотное регулирование
- Регулирование изменением числа пар полюсов
- Изменение питающего напряжения
- Добавочное сопротивление в цепи ротора
- Асинхронный вентильный каскад
- Изменение напряжения питания якоря
- Введение добавочного резистора в цепь якоря
- Большая Энциклопедия Нефти и Газа
- Шунтовой электродвигатель
Регулирование частоты вращения двигателей с параллельным возбуждением
 Частоту вращения двигателей постоянного тока можно изменять тремя способами: изменением сопротивления rя цепи якоря , изменением магнитного потока Ф , изменением подводимого к двигателю напряжения U.
Частоту вращения двигателей постоянного тока можно изменять тремя способами: изменением сопротивления rя цепи якоря , изменением магнитного потока Ф , изменением подводимого к двигателю напряжения U.
Первый способ применяют редко, так как он неэкономичен, дает возможность вести регулирование частоты вращения только под нагрузкой и вынуждает использовать механические характеристики, имеющие различный наклон. При регулировании по этому способу вращающий предельно допустимый момент остается постоянным. Магнитный поток не меняется, и если приближенно считать, что сила тока, определяемая длительно допустимым нагревом двигателя, одинакова на всех частотах вращения, то предельно допустимый момент также должен быть одинаков на всех скоростях.
Регулирование скорости двигателей постоянного тока с параллельным возбуждением изменением магнитного потока получило значительное распространение. Величину потока можно изменять реостатом. При увеличении сопротивления этого реостата уменьшается сила тока возбуждения и магнитный поток и увеличивается частота вращения. Каждому уменьшенному значению магнитного потока Ф соответствуют увеличенные значения n0 и b.
Таким образом, при ослаблении магнитного потока механические характеристики представляют собой прямые линии, расположенные выше естественной характеристики, непараллельные ей и имеющие тем больший наклон, чем меньшим потокам они соответствуют. Число их зависит от числа контактов на реостате и может быть достаточно большим. Таким образом, регулирование частоты вращения ослаблением потока может быть сделано практически бесступенчатым.

Если по-прежнему приближенно считать предельно допустимую силу тока на всех скоростях одинаковой, то P = const
Таким образом, при регулировании частоты вращения изменением магнитного потока предельно допустимая мощность двигателя остается постоянной при всех скоростях. Предельно допустимый момент изменяется обратно пропорционально частоте вращения. При повышении частоты вращения двигателя ослаблением поля увеличивается искрение под щетками вследствие роста реактивной э. д. с, наводимой в коммутируемых секциях двигателя.
При работе двигателя с ослабленным потоком уменьшается устойчивость работы, особенно когда нагрузка на валу двигателя является переменной. При малом значении потока заметно размагничивающее действие реакции якоря. Так как размагничивающее действие определяется величиной силы тока якоря электродвигателя, то при изменениях нагрузки частота вращения двигателя резко меняется. Для повышения устойчивости работы регулируемые двигатели с параллельным возбуждением обычно снабжают слабой последовательной обмоткой возбуждения, поток которой частично компенсирует размагничивающее действие реакции якоря.
Двигатели, предназначенные для работы с повышенными частотами вращения, должны обладать повышенной механической прочностью. При высоких скоростях усиливаются вибрации двигателя и шум при работе. Эти причины ограничивают наибольшую частоту вращения электродвигателя. Низшая частота вращения также имеет определенный практический предел.
Номинальный момент определяет размеры и стоимость двигателей постоянного тока (так же как и асинхронных двигателей). При понижении наименьшей, в данном случае номинальной, частоты вращения двигателя определенной мощности номинальный момент его возрастет. Размеры двигателя при этом увеличатся.
На промышленных предприятиях наиболее часто применяют двигатели с диапазонами регулирования

Для расширения диапазона регулирования частоты вращения изменением магнитного потока иногда употребляют особую схему возбуждения двигателя, позволяющую улучшить коммутацию и снизить влияние реакции якоря на высоких частотах вращения двигателя. Питание катушек двух пар полюсов разделяют, образуя две независимые цепи: цепь катушек одной пары полюсов и цепь другой пары.
Одну из цепей включают на постоянное напряжение, в другой изменяют величину и направление тока. При таком включении общий магнитный поток, взаимодействующий с якорем, можно изменять от суммы наибольших значений потоков катушек двух цепей до их разности.
Катушки включены так, что через одну пару полюсов всегда проходит полный магнитный поток. Поэтому реакция якоря сказывается в меньшей степени, чем при ослаблении магнитного потока всех полюсов. Так можно регулировать все многополюсные двигатели постоянного тока с волновой обмоткой якоря. При этом достигается устойчивая работа двигателя в значительном диапазоне скоростей.
Регулирование частоты вращения двигателей постоянного тока посредством изменения подводимого напряжения требует применения специальных схем.
Двигатели постоянного тока по сравнению с асинхронными значительно тяжелее и в несколько раз дороже. К. п. д. этих двигателей ниже, а эксплуатация их более сложна.
Промышленные предприятия получают энергию трехфазного тока, и для получения постоянного тока требуются специальные преобразователи. Это связано с добавочными потерями энергии. Основной причиной применения для привода металлорежущих станков двигателей постоянного тока с параллельным возбуждением является возможность практически бесступенчатого и экономичного регулирования их частоты вращения.
В станкостроении применяют комплектные приводы с выпрямителями и двигателем постоянного тока с параллельным возбуждением (рис. 1). Посредством реостата PC изменяют силу тока возбуждения электродвигателя, обеспечивая практически бесступенчатое регулирование его частоты вращения в диапазоне 2:1. В комплект привода входит пусковой реостат РП, а также аппаратура защиты, на рис. 1 не показанная.
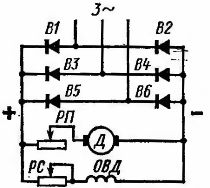
Рис. 1. Схема электропривода постоянного тока с выпрямителем
В ыпрямители (B1 — В6), погруженные в трансформаторное масло, и всю аппаратуру помещают в шкафу управления, а реостат PC устанавливают в месте, удобном для обслуживания.
Если Вам понравилась эта статья, поделитесь ссылкой на неё в социальных сетях. Это сильно поможет развитию нашего сайта!
Подписывайтесь на наш канал в Telegram!
Просто пройдите по ссылке и подключитесь к каналу.
Не пропустите обновления, подпишитесь на наши соцсети:
Источник
Регулирование частоты вращения электродвигателей
Подписка на рассылку
Порядка 70% потребляемой промышленностью мощности, приходится на электропривод. Огромное разнообразие технологических процессов диктует свои правила, вследствие чего, появилась необходимость в изменении скорости вращения электродвигателя непосредственно во время технологического процесса. В данной статье мы раскроем различные способы регулирования скорости вращения электродвигателей.
Параметры, изменив которые, мы изменим скорость двигателя переменного тока (ДПТ):
- частота напряжения;
- число пар полюсов;
- величина напряжения;
- добавочное сопротивление в цепи ротора;
- вентильный каскад.
Изменяемые параметры для ДПТ:
- напряжение питания;
- сопротивление цепи обмотки якоря;
- магнитный поток.
Методы регулирования частоты вращения электродвигателя
Далее мы подробно рассмотрим эти способы и их применимость к различным типам электродвигателей.
Частотное регулирование
Наиболее эффективный, постоянно совершенствующийся способ.
Применение: двигатели переменного тока (синхронные и асинхронные с кз ротором).
Корректируя частоту питающего напряжения, мы изменим угловую скорость магнитного поля статора, следовательно, скорость двигателя в значительном диапазоне, имея достаточно жесткие механические характеристики. Для сохранения в норме коэффициента мощности и допустимости кратковременных перегрузок, меняя частоту, следует изменять и саму величину питающего напряжения.
Преимущества способа:
- обширный диапазон регулировки;
- «жесткость» механических характеристик;
- минимум потерь «скольжения», мощности.
Недостаток — высокая стоимость (в последние годы становится менее актуально).
Регулирование изменением числа пар полюсов
Применение: т.к. промышленность не выпускает серийно синхронные двигатели с изменяемым количеством пар полюсов, будем считать, что способ актуален только для асинхронных двигателей (далее АД) с кз ротором.
Способ реализуется изменением числа пар полюсов у обмоток. Этого можно добиться, изготовив двигатель с двумя независимыми обмотками. Но этот метод приводит к удорожанию конструкции и увеличению размеров машины. Поэтому наиболее выгодным является увеличение числа пар полюсов без использования второй независимой обмотки.
Промышленностью выпускаются двухскоротсные, трёхскоростные и четырёхскоростные электродвигатели.
Достоинства:
- экономичность;
- «жёсткие» механические характеристики.
Недостатки:
- ограниченное количество возможных скоростей;
- ступенчатость переключения скоростей.
Изменение питающего напряжения
Применение: асинхронные двигатели.
Изменять напряжение на статоре можно, включая в его цепь резисторы (старый и неэкономичный способ), автотрансформаторы или тиристорные регуляторы.
При регулировании скорости изменением напряжения, критический момент пропорционален квадрату подводимого напряжения. Снижается устойчивость к кратковременным перегрузкам и КПД, поэтому метод предпочтителен при «вентиляторной» нагрузке. Еще один недостаток — малый диапазон регулирования.
Добавочное сопротивление в цепи ротора
Применение: АД с фазным ротором.
При изменении сопротивления ротора прямо пропорционально изменяется скольжение. Но величина критического момента остается постоянной. Это позволяет подобрать сопротивления так, чтобы уравнять критический момент с пусковым, что благоприятно сказывается на пуске двигателя под нагрузкой.
Достоинства способа:
- простота реализации;
- критический момент = const;
Недостатки:
- большие потери (при изменении скорости половина мощности тратится на выделение тепла);
- малый диапазон;
- «мягкие» механические характеристики.
Асинхронный вентильный каскад
Применение: АД с фазным ротором.
Смысл регулирования каскадными схемами заключается в подаче в цепь ротора добавочной ЭДС. Изменяя добавочную ЭДС ротора, мы изменяем ток ротора, а значит его момент и скорость. Создать добавочную ЭДС, помимо устройства вентильного каскада, может и ДПТ — машинно-вентильный каскад.
Достоинства:
- Минимум сопутствующей силовой и контактной аппаратуры;
- плавность регулировок;
- малая мощность управления.
Недостатки:
- стоимость;
- низкий коэффициент мощности;
- плохая устойчивость к перегрузкам.
Изменение напряжения питания якоря
Применение: любые ДПТ.
Способ можно использовать если источником электрической энергии является генератор. Реализовать от общей сети невозможно.
Достоинства:
- плавность регулировок;
- простота пусков и торможений;
- экономичность.
Недостатки:
- необходимость трехкратного преобразования энергии→низкий КПД;
- три электрические машины в системе;
- дорогая эксплуатация.
Введение добавочного резистора в цепь якоря
Применение: любые ДПТ.
Заключается в последовательном включении в цепь якоря регулировочного реостата. Но способ не получил распространения ввиду своей неэкономичности и плохого влияния на КПД двигателя, т.к. в цепи реостата теряется очень большое количество энергии.
Регулирование изменением магнитного потока
В цепь возбуждения двигателей параллельного и смешанного возбуждения подключается реостат. В машинах последовательного возбуждения изменение магнитного потока в обмотке возбуждения производится шунтированием этой обмотки регулируемым сопротивлением. Максимальная скорость вращения двигателя ограничивается лишь механической прочностью якоря. Скорость двигателя регулируется в диапазонах 2:1-5:1, в частных случаях 8-10:1.
Преимущества:
- минимальные потери→экономичность;
- широкий диапазон регулирования
Недостатки:
- невозможно бесконечно уменьшать ток в обмотке возбуждения, двигатель уйдет «в разнос».
Источник
Большая Энциклопедия Нефти и Газа
Шунтовой электродвигатель
Шунтовые электродвигатели кратковременно могут работать с перегрузкой. Допустимая кратковременная перегрузка ограничивается появлением значительного искрения под щетками. [2]
Шунтовые электродвигатели применяют для электроприводов, не требующих большого пускового момента при регулировании скорости. Последнее здесь достигается изменением ноля путем введения в цепь возбуждения переменного сопротивления. При ослаблении поля скорость электродвигателя может быть увеличена в 1 5 — 2 раза от номинальной. [4]
Шунтовой электродвигатель ПВС-012 рассчитан на напряжение питающей сети 110 в постоянного тока. [6]
Преимущества шунтового электродвигателя следующие: постоянное число оборотов при различных нагрузках, электродвигатель не развивает большой скорости при снятии нагрузки, легкое и плавное регулирование числа оборотов. [8]
В шунтовом электродвигателе обмотка возбуждения включена параллельно обмотке якоря. Обмотка возбуждения составляет отдельную ветвь, поэтому ток в ней остается постоянным при изменении нагрузки в якоре. [9]
Положительной особенностью шунтовых электродвигателей является возможность экономичной и глубокой регулировки угловой скорости путем измерения напряжения подводимого к электромагнитам тока. [11]
Положительной особенностью шунтовых электродвигателей является возможность экономичной и глубокой регулировки частоты вращения путем изменения напряжения подводимого к электромагнитам тока. [13]
При пуске шунтового электродвигателя необходимо постепенно увеличивать силу тока. Для этого обычно употребляется пусковой реостат, который плавно выводится по мере того, как число оборотов двигателя увеличивается, В последние годы вместо пускового реостата все чаще стали применять термосопротивлс-ние, включенное в цепь якоря двигателя. При подаче напряжения через якорь, а следовательно, и через терми-стор, начинает течь ток. В термпсторе выделяется джоулево тепло, его температура повышается, а сопротивление падает. [14]
Нижний предел скорости шунтового электродвигателя ограничен размерами двигателя, верхний — условиями надежности по безопасности его работы. Эти двигатели обычно применяются в сочетании с механическими коробками, имеющими звено настройки. [15]
Источник



