
- Способы и кинематические схемы поворота колёсных машин, их сравнительный анализ. Регулировки рулевых управлений тракторов и автомобилей.
- Принцип поворота колесных машин
- Поворот машины при помощи поворота управляемых колес одной, нескольких или всех осей
- Поворот ТС «по-гусеничному» принципу
- Шарнирносочлененные схемы поворота ТС для инженерных тягачей
- Агротехнические показатели трактора. Продольная устойчивость трактора. Статическая устойчивость от опрокидывания , страница 4
- Способы поворота колесных машин
Способы и кинематические схемы поворота колёсных машин, их сравнительный анализ. Регулировки рулевых управлений тракторов и автомобилей.
Сельскохозяйственное производство связано с транспортировкой различных грузов: зерна, удобрений, горючего, кормов и др. Транспортные работы по объему составляют примерно 30% всех работ в сельском хозяйстве. Значительный объем перевозок сельскохозяйственных грузов осуществляется тракторными поездами. Время, затрачиваемое на перевозку грузов колесными тракторами, составляет более 50% общего годового рабочего времени.
Трактор или автомобиль движется от пункта отправления к пункту назначения по пути сложной конфигурации, состоящему из прямолинейных и криволинейных участков. Для движения в заданном направлении водитель воздействует на органы управления, что приводит к изменению положнеия машины на опорной поверхности. Использование принципов системного подхода позволяет рассматривать поворот трактора и автомобиля как систему машина — водитель — опорная поверхность (почва). Одним из главных свойств машины как звена в системе является управляемость.
Под управляемостью маши»ы понимают ее способность точно сохранять заданное направление движения (заданный курс), а при соответствующем воздействии изменять его по требуемой траектории. Первое свойство называют курсовой устойчивостью, а второе — поворачиваемостью машины.
В качестве критериев оценки управляемости и поворачивае-мости колесных машин применяют следующие количественные показатели: минимальный радиус поворота при круговом движении; предельное значение скорости изменения кривизны траектории различных точек; количество энергии, затрачиваемое на управление при движении по заданной траектории; удельная сила тяги, необходимая при повороте; коэффициент использования сцепного веса при повороте.
Чем меньше радиус поворота, больше предельная скорость изменения кривизны траекторий характерных точек и меньше энергии затрачивается на управление, тем лучше управляемость и поворачиваемость колесной машины.
Основной способ поворота колесных машин — поворот управляемых колес в горизонтальной плоскости (рис. 84, а, б, в, г, ж). Обычно в качестве управляемых используют передние колеса, которые могут быть меньше задних (в универсально-пропашных тракторах) или одинакового с ними размера.
Некоторые тракторы и автомобили, чаще всего полноприводные, выполняют со всеми управляемыми колесами. Направления движения такой машины изменяют двумя способами: 1) передние и задние колеса поворачивают в разные стороны (рис. 84, г), и машина движется по окружности, центром О которой является пересечение осей вращения колес; 2) все колеса поворачивают в одну сторону (рис. 84, ж). Последний способ называют «краб». При повороте способом «краб» можно предотвратить сползание тракторов, работающих на косогорах, сместив все колеса на некоторый угол в сторону, противоположную направлению сползания. При этом улучшается и поперечная устойчивость трактора.
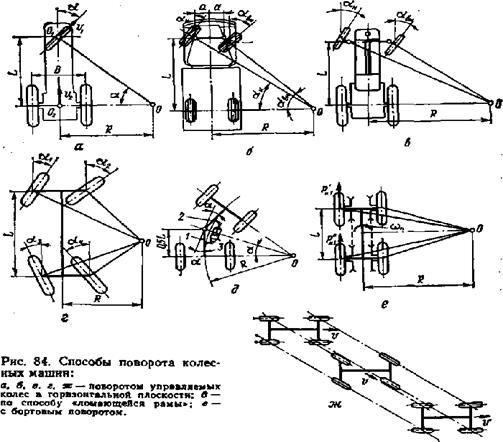
Однако при повороте машин с управляемыми колесами трудно получить малые радиусы поворота. Привод рулевого управления этих машин, особенно машин со всеми управляемыми колесами, имеет сложную конструкцию. Полезный объем таких машин уменьшен из-за наличия в корпусе ниш, необходимых для размещения управляемых колес при их повороте.
В связи с этим созданы новые схемы поворота по способу «ломающейся рамы» (рис. 84, д). Такие машины представляют собой систему из шарнирно сочлененных секций / и 2, поворачивающихся одна относительно другой в двух плоскостях. Направление движения такой машины изменяют поворотом одной секции относительно другой с помощью гидроцилиндра 3 на некоторый угол а в горизонтальной плоскости. При данном способе поворота достигаются хорошая маневренность и малые радиусы поворота, а также уменьшается число шарниров, так как оси колес неподвижны по отношению к рамам. Однако такие машины не могут работать на склонах.
Стремление создать высокоманевренный и простой по конструкции колесный трактор привело к появлению машины с колесной формулой 4К4 и управлением, выполненным по схеме поворота гусеничного трактора, т. е. с бортовым поворотом (рис. 84, е). Передние и задние колеса каждой стороны соединены шестеренной или цепной передачей. При повороте трактора выключают колеса одного борта, а при необходимости крутого поворота тормозят их. Касательная сила тяги PKl создается на включенном борту трактора. В такой конструкции отсутствует сложная в изготовлении и эксплуатации шарнирная передача крутящего момента к ведущим и управляемым колесам.
Каждый из перечисленных способов поворота определяет своеобразие кинематики поворота. Рассмотрим сначала кинематику простейшего случая поворота на опорной поверхности трактора с одним передним управляемым колесом (рис. 84, а). Допустим, что радиус поворота постоянен, скорость движения установившаяся и шины не имеют боковой эластичности. При этих условиях движение трактора на повороте можно рассматривать как вращение вокруг постоянной оси. Чтобы найти ее положение, достаточно определить, где на опорной поверхности пересекаются плоскости, нормальные к векторам скоростей любых двух точек остова трактора, например точки 0\ середины передней оси и точки Ог середины заднего моста. Так как скорости v\ и V2 указанных точек перпендикулярны соответствующим осям, то плоскости, нормальные к векторам скоростей точек 0\ и 02, проходят через геометрические оси соответственно переднего и задних колес. Точка О пересечения этих осей определяет положение проекций искомой оси вращения на опорной поверхности. Эту точку называют центром поворота.
Расстояние 002 от центра поворота до середины заднего моста называют радиусом поворота и определяют по формуле
где L — продольная база трактора, м; о — угол отклонения переднего колеса от его нейтрального положения при прямолинейном движении, град.
Минимальный радиус поворота Rm\n зависит от продольной базы L машины и возможного максимального угла ат»х отклонения колеса от нейтрального положения. Обычно атах=35.
45°. Минимальный радиус поворота по схеме на рисунке 84, д:
Источник
Принцип поворота колесных машин
Одна из самых важных систем ТС с точки зрения безопасности движения — система рулевого управления, обеспечивающая его движение (поворот) в заданном направлении.
В зависимости от конструктивных особенностей колесных машин различают три способа поворота:
- при помощи поворота управляемых колес одной, нескольких или всех осей
- созданием разности скоростей неуправляемых колес правого и левого бортов машин (поворот «погусеничному»)
- взаимным принудительным поворотом звеньев щарнирно-сочлененного ТС
Много- или двухзвенные колесные ТС (автопоезда), состоящие из колесного тягача, прицепа (прицепов) или полуприцепа (полуприцепов), осуществляют поворот при помощи управляемых колес только тягача или тягача и прицепного (полуприцепного) звена.
Поворот машины при помощи поворота управляемых колес одной, нескольких или всех осей
Наиболее широкое распространение получили схемы колесных машин с поворотными (управляемыми) колесами.
При увеличении числа пар управляемых колес уменьшается минимально возможный радиус поворота машины, т.е, улучшаются маневренные качества ТС. Однако стремление улучшить маневренность за счет применения передних и задних управляемых колес существенно усложняет конструкцию привода управления ими. Максимальный угол повороту управляемых колес обычно не превышает 35 …40°.
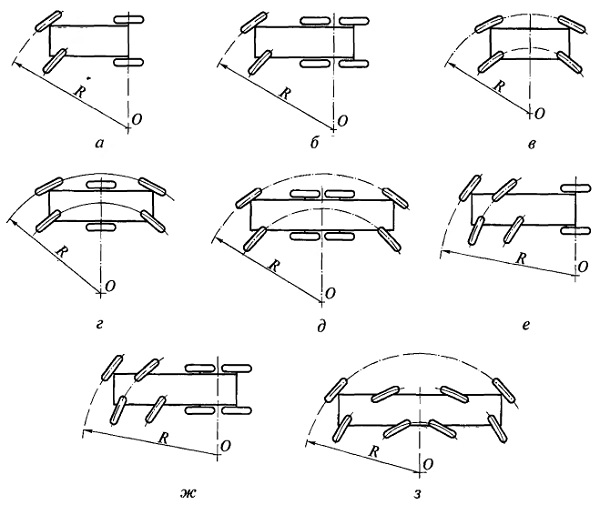
Рис. Схемы поворота двух-, трех- и четырехосных колесных машин с управляемыми колесами:
а, б — передними; в — передними и задними; е, ж — первой и второй осей; з — всех осей
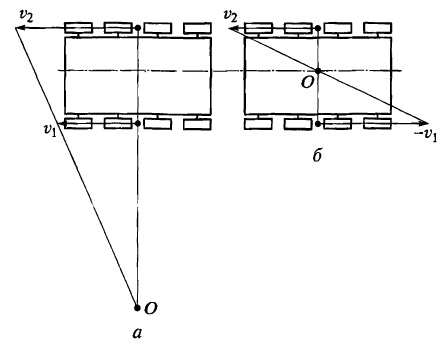
Рис. Схемы поворота колесной машины с неуправляемыми колесами:
а — с большим радиусом поворота; б — с нулевым радиусом; О — центр поворота; V1, V2 — скорости движения отстающего и забегающего бортов машины
Поворотом управляемых колес ТС водитель заставляет его передвигаться по траектории заданной кривизны в соответствии с углами поворота колес. Чем больше угол их поворота относительно продольной оси машины, тем меньше радиус поворота ТС.
Поворот ТС «по-гусеничному» принципу
Схема поворота «по-гусеничному» принципу используется сравнительно редко и в основном на специальных ТС. Примером может служить колесный тягач с неповоротными колесами и трансмиссией, обеспечивающей поворот тягача практически вокруг его геометрического центра. Такую же схему поворота имеет отечественный луноход, имеющий электромотор-колеса с формулой 8×8. Поворот подобных ТС осуществляется при неодинаковой скорости колес разных бортов машины. Такое управление поворотом наиболее просто обеспечить прекращением подачи вращающего момента на отстающий при повороте борт машины, скорость колес которого уменьшается вследствие их подтормаживания. Чем больше разность скоростей забегающего V2, т.е. внешнего по отношению к центру поворота (точка О), и отстающего V1 (внутреннего по отношению к центру поворота) бортов машины, тем меньше радиус ее криволинейного движения. В идеальном случае, если скорости всех колес обоих бортов будут равны, но направлены в противоположные стороны (V2 = -V1), мы получим нулевой радиус поворота, т. е. машина будет поворачиваться вокруг своего геометрического центра.
Основными недостатками ТС с неуправляемыми колесами являются повышенный расход мощности на совершение поворота и больший износ шин по сравнению с автомобилями, имеющими управляемые колеса.
Шарнирносочлененные схемы поворота ТС для инженерных тягачей
Инжирные тягачи обладают хорошей маневренностью (минимальный радиус поворота у них меньше, чем у обычных автомобилей с такой же базой и лучшей приспособляемостью к неровностям дороги (из-за наличия шарниров в сцепном устройстве тягача и прицепного звена), а также обеспечивают возможность использования колес большого диаметра, что улучшает проходимость этих ТС.
Источник
Агротехнические показатели трактора. Продольная устойчивость трактора. Статическая устойчивость от опрокидывания , страница 4
Занос менее опасен, чем опрокидывание. Чтобы избежать опрокидывания и свести действие боковых сил только к заносу, конструкторы стремятся снизить центр тяжести машины.
8.3. Управляемость колесных тракторов
8.3.1. Способы поворота колесных машин
Под управляемостью понимают способность машины двигаться по заданной траектории с требуемой точностью при воздействии водителя на механизм управления.
Управляемость обусловлена двумя свойствами машины: устойчивостью при неуправляемом движении и реакцией на управляющее воздействие водителя. Эти два альтернативных свойства должны быть присущи машине в определенном соотношении. Тогда машина в целом будет обладать хорошей управляемостью. Разграничить эти свойства машины весьма трудно, поэтому их рассматривают совместно, различая курсовую управляемость и курсовую устойчивость.
Качество управляемости колесных и гусеничных тракторов оценивается в полевых условиях по агротехническим показателям, обусловленными курсовой устойчивостью и поворачиваемостью.
Различают следующие способы поворота:
• управляемыми колесами только передней оси (рис. 8.6, а);
• управляемыми колесами обеих осей двухосной машины (рис. 8.6, б);
• бортом за счет создания разности крутящих моментов на ведущих колесах кинематически или торможением (рис. 8.6, в);
• комбинация первого или второго способа с третьим (рис. 8.6, г);
• с помощью шарнирно сочлененной рамы (рис. 8.6, д).
Первый способ поворота применяют во всех автомобилях и тракторах колесных формул 4К2 и 4К4, у которых диаметр передних колес меньше, чем задних. Этот способ наиболее приемлем для транспортных средств, поэтому его применяют во всех случаях, когда нет ограничений.
Основное ограничение для использования первого способа — возможное соприкосновение колес с остовом двигателя или трактора при повороте управляемых колес. Если передняя часть машины широкая или диаметр управляемых колес очень большой, угол поворота их уменьшается, увеличивая минимальный радиус поворота и снижая маневренность (при заданной колее) трактора. В этом случае применяют шарнирную раму или четыре управляемых колеса, а также бортовой способ поворота, который может быть осуществлен только на тракторах колесной формулы 4К4б.
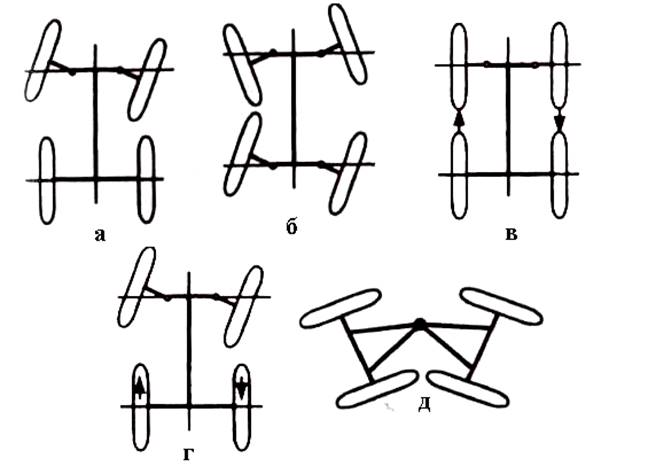
Рисунок 8.6 — Способы поворота колесных тракторов
Основной недостаток способа управления поворотом с помощью шарнирной рамы заключается в том, что при маневрировании передний и задний мосты поворачиваются одновременно, но в разные стороны. Это приводит к тому, что при необходимости увеличить расстояние между колесами и бороздой или рядком обрабатываемой культуры в процессе управления передний мост отъезжает (удаляется) от борозды или от рядка обрабатываемой культуры, а задний мост приближается. При этом достигается обратный эффект, в результате которого стенка борозды разрушается задним колесом или оно заезжает на рядок обрабатываемого растения. Как правило, из разрушенной борозды трактор не может выехать, не сделав огреха. Этот недостаток присущ и трактору с четырьмя управляемыми колесами.
Торможение бортом на колесных машинах (рис. 8.6, в) применяют крайне редко, потому что поворот при этом сопровождается сильной деформацией шин и большими потерями мощности.
Торможение одного из задних колес при повороте (рис. 8.6, г) как вспомогательное используют практически на всех универсально-пропашных тракторах. В эксплуатации подтормаживанием борта пользуются при выполнении крутых поворотов.
8.3.2. Кинематика и динамика поворота
Способы поворота многоосных машин показаны на рисунке 8.7. Если все колеса управляемые, возможно движение «крабом» (последняя схема на рис. 8.7). Этот способ перемещения машины применяют в экстремальных условиях, когда из исходного положения в нужный пункт следует переместиться по кратчайшей траектории (по прямой), не прибегая к поворотам.
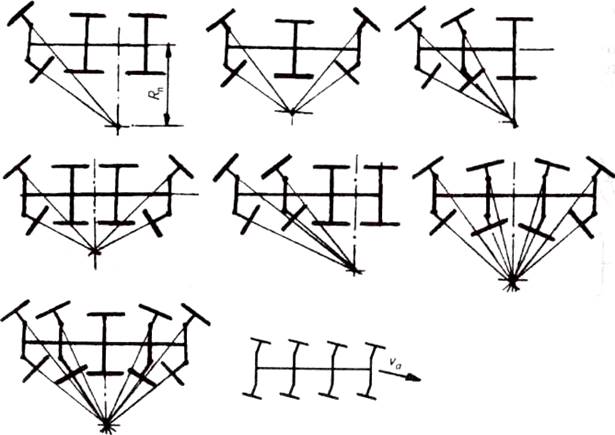
Рисунок 8.7 — Способы поворота многоосных машин
Источник
Способы поворота колесных машин




![]()
![]()
Под управляемостью понимается свойство автомобиля двигаться в заданном водителем направлении. Автомобиль может практически мгновенно реагировать на малейший поворот руля и устойчиво двигаться как в прямом направлении так и на поворотах или заметны его «рыскания» по дороге, когда заданное направление нарушается, происходит смещение автомобиля из стороны в сторо
ну. Такой автомобиль обладает плохой »курсовой устойчивостью».
Оценка этих свойств производится с помощью специальных испытаний по разработанным и утвержденным методикам.
 Наиболее часто управление колесных машин выполняется поворотом передних колес. Но известны и другие способы: за счет поворота соединенных шарнирно частей рамы, за счет поворота переднего моста, притормаживанием колес одной стороны машины.
Наиболее часто управление колесных машин выполняется поворотом передних колес. Но известны и другие способы: за счет поворота соединенных шарнирно частей рамы, за счет поворота переднего моста, притормаживанием колес одной стороны машины.
На рис. 85 приведены схемы поворота автомобиля поворотом правляемых колес.
Для исключения бокового скольжения на повроте управляемые колеса должны быть повернуты таким образом, чтобы их оси пересекались на оси задних колес двухосного автомобиля – (рис. 91а). Точка эта называется центром поворота автомобиля.
Рис. 91. Схемы поворота управляемых колес автомобилей
Для трех- и четырехосных автомобилей центры поворота располагаются на прямой, проходящей по середине между неуправляемыми мостами, в том числе на автомобиле с задними управляемыми колесами (рис. 91г). Признаком правильного выбора конструкции системы поворота является отсутствие повышенного износа шин.
На двухосных автомобилях более высокий износ протектора часто имеют шины передних управляемых колес, на трех- и четырехосных автомобилях сильнее могут изнашиваться шины колес среднего и заднего мостов, т.к. на поворотах они катятся с боковым скольжением.
Схема поворота четырехколесного экипажа была разработана в Германии в 1821 году Лангенспергером. На автомобиле эта схема впервые была применена французом Жанто в 1878 г. Основным элементом её является рулевая трапеция, состоящая из поперечной рулевой тяги, поворотных рычагов колес и балки моста. На автомобилях с независимой подвеской колес, чтобы не происходил поворот колес при качании автомобиля, когда сжимаются пружины подвески, поперечная тяга состоит из трех частей: центральной и двух боковых. Соединяющие эти тяги шарниры расплагаются напротив шарниров подвески.
На автомобилях с червячным рулевым механизмом центральнгая тяга рулевой трапеции закрепляется на сошке руля и маятниковом рычаге, а на автомобилях с реечным рулевым механизмом центральная тяга заключена в корпус и выполнена в виде зубчатой рейки, с которой входит в зацепление шестерня, соединенная с рулевым валом.
Способность автомобиля поворачиваться на площадке минимального размера называется маневренностью. Чтобы автомобиль имел минимальный радиус поворота, т.е. обладал хорошей маневренностью, угол поворота колесдолжен быть больше. На длинных грузовиках угол поворота колес доходит до 45 0 ,
но чаще угол поворота бывает 35-37 0 .
Боковые поворотные рычаги рулевой трапеции устанавливаются наклонно к продольной оси автомобиля с таким расчетом, чтобы их оси пересекались по данным акад. Е.А. Чудакова в центре заднего моста, или на 0,7 колесной базы автомобиля от оси переднего моста – по данным Бюссиена. Угол наклона рычагов отрабатывается в процессе доводки автомобиля.
Так как оси поворотных рычагов рулевой трапеции располагаются в разных фазах окружностей, по дугам которых перемещаются наружные концы поворотных рычагов, при перемещении соединенной с ними поперечной тяги поворотные рычаги повернуться на различные углы. Соответственно на разные углы повернуться и соединенные с рычагами управляемые колеса.
Для удобства пользования автомобилем радиус его поворота должен быть минимально возможный. Управляемыми поэтому иногда делаются не только передние, но и задние колеса (рис. 91г). Поворачиваются задние колеса обычно в сторону, противоположную повороту передних колес.
Недостатками такой системы кроме её сложности, является выезд задней части автомобиля в сторону, противоположную повороту передних колес, из-за чего трудно отъехать от стены, тротуара и т.п. Такой автомобиль, кроме того, склонен к опрокидыванию вследствие необычно крутых его поворотов. Чтобы устранить этот недостаток, поворот задних колес может откючаться, либо используются системы, позволяющие поворачивать задние колеса только тогда, когда угол поворота передних колес превышает 6. 7 градусов, например, при маневрировании.

Известны также конструкции легковых и грузовых автомобилей со всеми управляемыми колесами, в которых поворот задних колес может производиться в ту или иную сторону независимо от направления поворота передних. Такая система обеспечивает значительные преимущества перед поворотом только передних колес, позволяя пегковому автомобилю двигаться боком, например, при отъезде с места парковки, а также тягачу при транспортировании длинных грузов по узким дорогам, когда он не вписывается в поворот и т.п.
На большегрузных самосвалах и колесных тракторах типа “Кировец”, где колеса из-за их большого диаметра не могут быть повернуты на сколь-нибудь значительный угол, т.к. упираются в раму, для поворота машины рама делается из двух частей, соединенных шарниром (рис. 92). Одна часть рамы относительно другой может поворачиваться на угол 30 -35 0 .
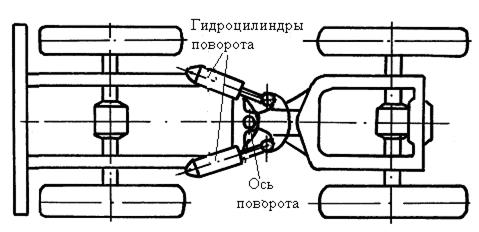
Рис. 92. Колесная машина с шарнирной рамой
Получили также распространение «одноосные тягачи», состоящие из одной ведущей оси, к которой на раме крепится двигатель, трансмиссия, кабина и сцепное устройство для крепления к полуприцепу (рис. 93).
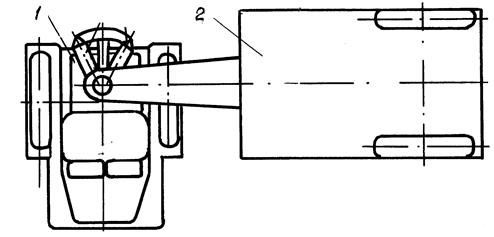
Рис. 93. Одноосный тягач, повернутый относительно полуприцепа:
1 — одноосный тягач; 2 — полуприцеп
Поворачивается одноосный тягач относительно полуприцепа двумя гидроцилиндрами Угол поворота – до 90 0 . Преимуществом такого способа поворота является возможность двигаться по кривой с радиусом, равным базе машины. Без полуприцепа одноосный тягач двигаться не может. Для транспортировки использует подставка в виде управляемого колеса, установливаемая под передним бампером.
В 60-х годах одноосные тягачи МАЗ-529 изготавливались на КЗКТ. Используются одноосные тягачи для скреперов. Колеса соединенного с одноосным тягачем скрепера не являются ведущими, при наборе грунта скрепер сзади толкается трактором.
Известен также поворот колесных машин т о р м о ж е н и е м колес одной стороны. В основном это короткобазные строительные машины и другая специальная техника. Преимуществом такого способа является очень малый радиус поворота, который при использовании дифференциального привода может равняться половине колеи машины, что удобно на небольших строительных площадках. Недостатком этого способа является скольжение колес на повороте и, как результат, повышенный износ шин и высокая мощность, расходуемая на поворот. До 5. 7 градусов поворот происходит обычно за счет деформации шин, а далее имеет место их интенсивное скольжение.
 Рассмотрим упраляемость автомобиля наиболее часто используемым способом – поворомом передних колес. Как следуеит из рис.89, управлякмые колеса поворачиваются на разные углы, причем угол поворота внутреннего колеса больше чем наружного. Разница в углах поворота управляемых колес непостоянна, на тем больше, чем больше углы поворота колес.
Рассмотрим упраляемость автомобиля наиболее часто используемым способом – поворомом передних колес. Как следуеит из рис.89, управлякмые колеса поворачиваются на разные углы, причем угол поворота внутреннего колеса больше чем наружного. Разница в углах поворота управляемых колес непостоянна, на тем больше, чем больше углы поворота колес.
На рис. 94 показана теоретическая 1 и действительная 2 зависимости между углами поворота нагруженного θн и внутреннего θвн колес автомобиля.
Но реальный угол поворота внутреннего колеса делается несколько меньше теоретически необходимого. Объясняется это тем, что при движении на повороте происходит перераспределение веса автомобиля: наружные колеса загружаются больше, боковая деформация их также больше. Окончательное решение, касающееся величины углов поворота, принимается по результатам износа шин при испытаниях автомобиля.
Рис. 94. Зависимости между углами
поворота наружного и внутреннего
управляемых колес автомобиля:
1 – без учета увода; 2 – с учетом увода
При повороте внутреннего колеса на 20 0 , наружное поворачивается на угол:
ВАЗ-2105, -2107 – 16 0 30′ Г А З — 53 – 17 0 30′
«Москвич» -2140 – 17 0 25′ З И Л — 130 – 18 0
Г А З — 3110 – 18 0 30′ М А З — 5335 – 17 0 50′
Средний угол поворота колес θсрможет быть найден пз выражения
Максимальный угол поворота наружного управляемого колеса бывает до 45 0 (например, на грузовике ЗИЛ-4331). На автомобилях с ведущими управляемыми колесами УАЗ-469, ЗИЛ-131 максимальный угол поворота наружного колеса 29 0 . При бóльшем угле выходит из строя шарнир привода колеса.
 Теоретическая зависимость между углами поворота наружного θн и внутреннего θвн управляемых колес, базой автомобиля L, расстоянием между осями поворота колес lо может быть выражена (рис. 95):
Теоретическая зависимость между углами поворота наружного θн и внутреннего θвн управляемых колес, базой автомобиля L, расстоянием между осями поворота колес lо может быть выражена (рис. 95):
Решая эти уравнения, получим
Зависимость (69) называется условием поворачиваемости автомобиля без скoльжения колёс.
Рис. 95. Схема поворота двухосного
Увод колес автообиля
Под действием нагрузок шина колеса автомобиля деформируется в зоне контакта с дорогой не только в вертикальном (радиальном), но также окружном и боковом направлениях. Боковая деформация ведет к изменению направления качения колеса. Явление это называется уводом колеса. Чем больше боковая сила, тем больше угол увода.
Сопротивление уводу шины характеризуется коэффициентом сопротивления уводу. Зависимость между действующей на колесо боковой силой, коэффициентом сопротивления уводу и углом увода можно выразить:
где Рп – боковая сила; Кd – коэффициент сопротивления уводу; d – угол увода.
Практически линейная зависимость между Рп и d вначале (рис. 96) изменяется при больших боковых силах из-за появляющегося после 6 0 . 8 0 увода проскальзывания шины на дороге, а потом и полного её скольжения. Если скольжение не превышает 15%, управляемость считается удовлетворительной.
Угол увода зависит от боковой жесткости шины: чем больше боковая жесткость (выше давление, толще боковина), тем меньше увод. С увеличением числа слоев нитей корда в каркасе шины коэффициент сопротивления уводу возрастает. Зависит он и от расположения нитей корда в шине: (шины с радиальным расположением нитей корда – шины типа «Р») имеют коэффициент сопротивления уводу на 10-15% меньше, чем шины, нити корда которых распложены под углом 40-42 0 к средней плоскости колеса (диагональные шины). Увод колес с радиальными шинами будет настолько же больше.
 Низкопрофильные шины (ГОСТ 20993-75) имеют более высокую боковую жесткость, чем тороидальные шины и, следовательно, меньший увод. Этим, а также лучшей плавностью хода автомобилей на таких шинах объясняется их широкое распространение на легковых автомобилях.
Низкопрофильные шины (ГОСТ 20993-75) имеют более высокую боковую жесткость, чем тороидальные шины и, следовательно, меньший увод. Этим, а также лучшей плавностью хода автомобилей на таких шинах объясняется их широкое распространение на легковых автомобилях.
В реальных условиях колеса автомобиля почти все гда катятся с уводом. Из-за центробежной силы даже при небольших поворотах колеса имеют увод 2. 3 0 . При уводе 5-6 0 коэффициент сопротивления качению колеса возрастает в 1,6. 2 раза.
Рис. 96. Зависимость между
действующей боковой силой
и углом увода колеса
Увод колес существенно влияет на управляемость автомобиля. Радиус поворота автомобиля с учетом увода передних и задних колес может быть больше или меньше, чем в случае, когда увод отсутствует. Значения коэффициентов сопротивления уводу диагональных и некоторыхрадиальных шин приводятся в табл. 13 и 13а.
Источник



