
- Способ описания движения это что
- Видеоурок по физике «Способы описания движения. Траектория. Путь. Перемещение»
- Способы описания движения. Система отсчета
- Урок 3. Физика 10 класс
- В данный момент вы не можете посмотреть или раздать видеоурок ученикам
- Получите невероятные возможности
- Конспект урока «Способы описания движения. Система отсчета»
Способ описания движения это что
В кинематике существуют три способа аналитического описания движения материальной точки в пространстве. Рассмотрим их, ограничившись случаем движения материальной точки на плоскости, что позволит нам при выборе системы отсчёта задавать лишь две координатные оси.
1. Векторный способ.
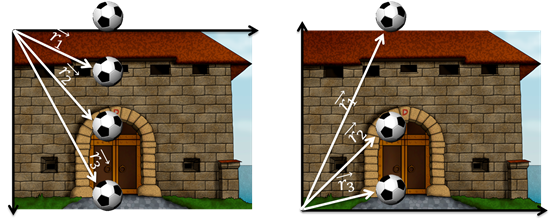
В этом способе положение материальной точки `A` задаётся с помощью так называемого радиус-вектора `vecr`, который представляет собой вектор, проведённый из точки `O`, соответствующей началу отсчёта выбранной системы координат, в интересующую нас точку `A` (рис. 1). В процессе движения материальной точки её радиус-вектор может изменяться как по модулю, так и по направлению, являясь функцией времени `vecr=vecr(t)`.
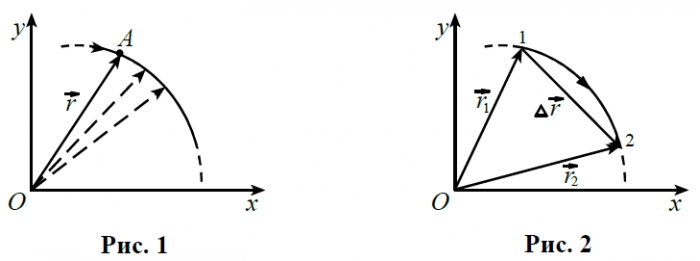
Геометрическое место концов радиус-вектора `vecr(t)` называют траекторией точки `A`.
В известном смысле траектория движения представляет собой след (явный или воображаемый), который «оставляет за собой» точка `A` после прохождения той или иной области пространства. Понятно, что геометрическая форма траектории зависит от выбора системы отсчёта, относительно которой ведётся наблюдение за движением точки.
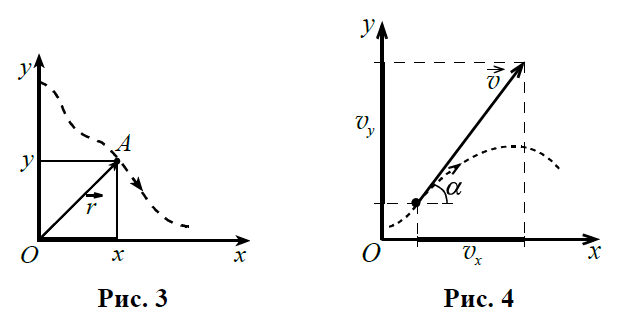
Пусть в процессе движения по некоторой траектории в выбранной системе отсчёта за промежуток времени `Delta t` тело (точка `A`) переместилось из начального положения `1` с радиус-вектором `vec r_1` в конечное положение `2` с радиус-вектором `vec r_2` (рис. 2). Приращение `Deltavec r` радиус-вектора тела в таком случае равно: `Deltavec r = vec r_2- vec r_1`.
Вектор `Deltavec r`, соединяющий начальное и конечное положения тела, называют перемещением тела.
Отношение `Delta vec r//Delta t` называют средней скоростью (средним вектором скорости) `vec v_»cp»` тела за время `Delta t`:
`vecv_»cp»=(Deltavecr)/(Delta t)` (1)
Вектор `vecv_»cp»` коллинеарен и сонаправлен с вектором `Deltavec r`, так как отличается от последнего лишь скалярным неотрицательным множителем `1//Delta t`.
Предложенное определение средней скорости справедливо для любых значений `Delta t`, кроме `Delta t=0`. Однако ничто не мешает брать промежуток времени `Delta t` сколь угодно малым, но отличным от нуля.
Для точного описания движения вводят понятие мгновенной скорости, то есть скорости в конкретный момент времени `t` или в конкретной точке траектории. С этой целью промежуток времени `Delta t` устремляют к нулю. Вместе с ним будет стремиться к нулю и перемещение `Delta vec r`. При этом отношение `Deltavec r//Delta t` стремится к определённому значению, не зависящему от `Delta t`.
Величина, к которой стремится отношение `Deltavec r//Delta t` при стремлении `Delta t` к нулю, называется мгновенной скоростью`vec v`:
`vec v =(Delta vec r)/(Delta t)` при `Delta t -> 0`.
Теперь заметим, что чем меньше `Delta t`, тем ближе направление `Deltavec r` к направлению касательной к траектории в данной точке. Следовательно, вектор мгновенной скорости направлен по касательной к траектории в данной точке в сторону движения тела.
В дальнейшем там, где это не повлечёт недоразумений, мы будем опускать прилагательное «мгновенная» и говорить просто о скорости `vec v` тела (материальной точки).
Движение тела принято характеризовать также ускорением, по которому судят об изменении скорости в процессе движения. Его определяют через отношение приращения вектора скорости `Delta vec v` тела к промежутку времени `Delta t`, в течение которого это приращение произошло.
Ускорением `veca` тела называется величина, к которой стремится отношение `Delta vec v//Delta t` при стремлении к нулю знаменателя `Delta t`:
`vec a =(Delta vec v)/(Delta t)` при `Delta t -> 0` (2)
При уменьшении `Delta t` ориентация вектора`Delta vec v` будет приближаться к определённому направлению, которое принимается за направление вектора ускорения `vec a`. Заметим, что ускорение направлено в сторону малого приращения скорости, а не в сторону самой скорости!
Напомним, что в системе СИ единицами длины, скорости и ускорения являются соответственно метр (м), метр в секунду (`»м»//»с»`) и метр на секунду в квадрате ( `»м»//»с»^2`).
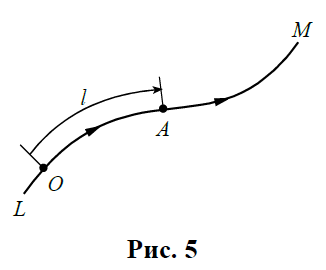
2. Координатный способ.
В этом способе положение материальной точки `A` на плоскости в произвольный момент времени `t` определяется двумя координатами `x` и `y`, которые представляют собой проекции радиус-вектора $$ \overrightarrow
3. Естественный (или траекторный) способ.
Этот способ применяют тогда, когда траектория материальной точки известна заранее. На заданной траектории `LM` (рис. 5) выбирают начало отсчёта – неподвижную точку `O`, а положение движущейся материальной точки `A` определяют при помощи так называемой дуговой координаты `l`, которая представляет собой расстояние вдоль траектории от выбранного начала отсчёта `O` до точки `A`. При этом положительное направление отсчёта координаты `l` выбирают произвольно, по соображениям удобства, например так, как показано стрелкой на рис. 5.
Движение тела определено, если известны его траектория, начало отсчёта `O`, положительное направление отсчёта дуговой координаты `l` и зависимость $$ l\left(t\right)$$.
Следующие два важных механических понятия – это пройденный путь и средняя путевая скорость.
По определению, путь `Delta S` — это длина участка траектории, пройденного телом за промежуток времени `Delta t`.
Ясно, что пройденный путь – величина скалярная и неотрицательная, а потому его нельзя сравнивать с перемещением `Delta vec r`, представляющим собой вектор. Сравнивать можно только путь `Delta S` и модуль перемещения `
|Delta vecr|`. Очевидно, что `Delta S >=|Deltavec r|`.
Средней путевой скоростью `v_»cp»` тела называют отношение пути `Delta S` к промежутку времени `Delta t`, в течение которого этот путь был пройден:
`v_»cp»=(Delta S)/(Delta t)` (3)
Определённая ранее средняя скорость `v_»cp»` (см. формулу (1)) и средняя путевая скорость отличаются друг от друга так же, как `Deltavec r` отличается от `Delta S`, но при этом важно понимать, что обе средние скорости имеют смысл только тогда, когда указан промежуток времени усреднения `Delta t`. Само слово «средняя» означает усреднение по времени.
Городской троллейбус утром вышел на маршрут, а через 8часов, проехав в общей сложности `72` км, возвратился в парк и занял своё обычное место на стоянке. Какова средняя скорость `vec v_»cp»` и средняя путевая скорость `v_»cp»` троллейбуса?
Поскольку начальное и конечное положения троллейбуса совпадают, то его перемещение `Delta vecr` равно нулю: `Deltavecr=0`, следовательно, `vecv_»ср»=Deltavecr//Deltat=0` и `|vecv_»ср»|=0`. Но средняя путевая скорость троллейбуса не равна нулю:
`v_»cp»=(Delta S)/(Delta t)=(72 «км»)/(8 «ч»)=9 «км»//»ч»`.
Источник
Видеоурок по физике «Способы описания движения. Траектория. Путь. Перемещение»

В этом видеоуроке мы с вами познакомимся с основными способами описания механического движения. Вспомним, какие существуют виды механического движения в зависимости от формы траектории. А также узнаем, что такое перемещение и чем оно отличается от пройдённого пути.
В начале урока напомним учащимся о том, что такое механическое движение. Механическим движением называется изменение положения тела или частей тела в пространстве относительно других тел с течением времени.

Для описания движения реального тела пользуются его моделью — материальной точкой, то есть телом, размерами и формой которого в данных условиях можно пренебречь.
Далее мы вводим два способа описания движения материальной точки: координатный и векторный.
При рассмотрении координатного способа описания движения следует обратить внимание учащихся на то, что при движении точки в выбранной системе отсчёта её координаты с течением времени изменяются. То есть они зависят от времени или, говорят, являются функциями времени.

Если уравнения движения известны, то мы можем рассчитать координаты точки для любого момента времени, а следовательно, и её положение относительно выбранного тела отсчёта.
Второй способ описания движения — векторный. В нём положение точки задаётся при помощи радиус-вектора.
Радиус-вектор — это направленный отрезок, проведённый из начала координат в данную точку.
При движении материальной точки радиус-вектор, как и координаты, является функцией времени, так как он изменяет свою длину и поворачивается.

Далее мы вводим понятие проекции вектора на ось и рассказываем, каким образом она определяется для различных случаев.
Также положение точки через некоторый промежуток времени можно определить, зная траекторию её движения, начальное положение точки на этой траектории и путь, пройденный точкой за этот промежуток времени. Далее мы напоминаем учащимся, что такое траектория движения, путь, и вводим понятие перемещения.

Здесь важно обратить внимание учащихся на то, что путь, пройденный телом, нельзя сравнивать с его перемещением, поскольку путь — величина скалярная, а перемещение — векторная.
В конце урока проводим краткое повторение изученного материала.
Источник
Способы описания движения. Система отсчета
Урок 3. Физика 10 класс
В данный момент вы не можете посмотреть или раздать видеоурок ученикам
Чтобы получить доступ к этому и другим видеоурокам комплекта, вам нужно добавить его в личный кабинет, приобрев в каталоге.
Получите невероятные возможности

Конспект урока «Способы описания движения. Система отсчета»
Сегодня мы рассмотрим наиболее распространенные способы описания движения и более подробно остановимся на понятии системы отсчёта. Напомним, что для описания движения материальной точки нужно научиться рассчитывать положение точки в любой момент времени, относительно выбранного тела отсчета.
Например, если мы задаём положение точки в системе координат, то каждая координата будет зависеть от времени. То есть, чтобы описать движение точки нужно найти функцию зависимости каждой координаты от времени.
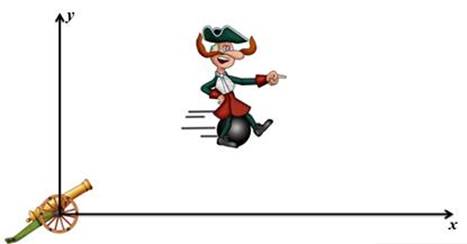
Для примера возьмем подвиг незабвенного барона Мюнхгаузена, который утверждал, что может летать на ядре. Если учесть большое расстояние, которое пролетает ядро, то Мюнхгаузена можно считать за точку. Пушка будет являться телом отсчёта, то есть, началом координат. Положение барона можно описать с помощью двух координат, поскольку он двигается только в одной плоскости.
Тогда, зависимости координат х и у будут описываться уравнениями:

Эти уравнения называются кинематическими уравнениями движения точки.
Линия, вдоль которой движется точка в пространстве, называется траекторией.
Движение может быть разным, и траектория может быть сколь угодно сложной. Движение называется прямолинейным, если траектория является прямой линией.
Если же траектория представляет собой кривую, то это движение криволинейное.
Другой способ описания движения — это векторный способ. На прошлом уроке мы познакомились с тем, как задавать положение точки с помощью радиус-вектора. Если точка двигается, то с течением времени, радиус вектор может изменять длину и направление. Таким образом, радиус-вектор являться функцией зависимости от времени:


Поскольку радиус-вектор определяется с помощью координат, то одно векторное уравнение эквивалентно трём скалярным уравнениям:

Как мы знаем, системой отсчёта называется совокупность тела отсчёта и связанной с ним системы координат и часов, с помощью которых измеряется время. В различных системах отсчёта движение одного и того же тела может быть описано по-разному. Например, если сбросить мяч с крыши дома, то в системе отсчёта, связанной с крышей, длина радиус-вектора будет увеличиваться. Но в системе отсчёта связанной с поверхностью Земли, длина радиус-вектора будет уменьшаться.
Главное запомнить следующее: если выбрали тело отсчета, то все наблюдения, вычисления и уравнения должны быть связаны именно с этим телом отсчёта, как с началом координат.
Например, в каюте корабля все предметы остаются неподвижны, относительно корабля. Но, вместе с этим, все эти предметы двигаются относительно поверхности земли.

Таким образом, в системе отсчета, связанной с кораблем, координаты тел, находящихся в каюте, будут заданы постоянными величинами. В системе отсчёта, связанной с поверхностью земли, координаты будут задаваться в соответствии со скоростью движения корабля. Если мы предположим, что корабль двигается равномерно и прямолинейно, то меняться будет только одна координата. Если же мы предположим, что корабль покачивается на волнах, то координата зет будет задана периодичной функцией.
Примеры решения задач.
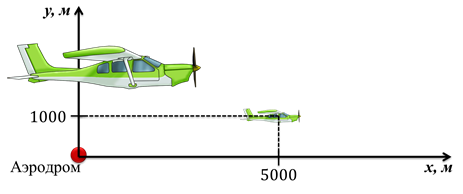
Задача 1. Самолёт летит в одной плоскости. В начальный момент времени самолёт находится на высоте 1000 м и на расстоянии 5 км от аэродрома. Постройте соответствующую систему координат и отметьте на ней самолёт в начальный момент времени.
Давайте выполним несколько упражнений. Допустим, самолёт летит в одной плоскости. В начальный момент времени самолет находится на высоте 1000 метров и на расстоянии 5 километров от аэродрома. Постройте соответствующую систему координат и отметьте на ней самолет в начальный момент времени.
Итак, очевидно, что телом отсчёта в данном случае является аэродром.
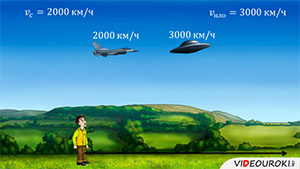
Задача 2. Если самолёт, двигаясь равномерно, ежеминутно поднимается на 1200 метров и удаляется от аэродрома на 3000 метров, то, как описать его движение?
Из формулировки этого вопроса мы можем извлечь следующее: в одинаковые промежутки времени, равные 1 мин, горизонтальное перемещение самолёта составляет 3000 метров, а вертикальное — 1200 метров.
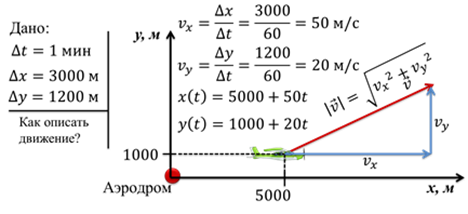
Обратите внимание, что реальная скорость самолёта направлена так, что самолёт одновременно удаляется от аэродрома и в горизонтальном, и в вертикальном направлении. Поэтому, скорости, которые мы нашли — это проекции вектора скорости на оси х и у.
Источник



