
- Способы геодезических разбивочных работ
- Описание способов разбивочных работ
- Способ прямоугольных координат
- Способ полярных координат
- Способ прямой угловой засечки
- Способ обратной угловой засечки
- Способ линейной засечки
- Способ пересечения створов
- Способ бокового нивелирования
- Способ линейной засечки
- Основы геодезии
- О геодезии и разный полезный материал для геодезистов.
- Линейная засечка
- Способы разбивочных работ
Способы геодезических разбивочных работ
Описание способов разбивочных работ
Выбор способа получения на местности планового положения точек зависит от вида геодезической сети на строительной площадке, особенностей местности и возводимого сооружения и других причин. Реализация того или иного способа заключается в основном в построении на местности заданных углов и расстояний. Для контроля положения вынесенной на местности точки ее координаты определяют другим независимым способом. Полевые разбивочные и контрольные работы выполняют по разбивочным чертежам , составленным по специальным расчетам, в которых исходными служат координаты опорных и проектных точек.
Способ прямоугольных координат
Этот способ обычно применяют в случаях, когда геодезической основой является строительная сетка ( рис. 1.46 ), ее вершины А, В, С, D закреплены на местности. Для выноса точки К (точка сооружения) по линии AD откладывай ют отрезок d 1 = У К — У А и по перпендикулярному AD направлению отрезок d 2 = Х к — Х А . Для построения отрезков и d 2 теодолит устанавливают над точкой А и приводят его в рабочее положение. Перекрестие нитей зрительной трубы наводят на точку D и от точки А в створе линии AD , фиксируемой теодолитом, откладывают горизонтальное проложение d 1 и получают точку Р. Теодолит переносят и устанавливают над точкой Р , приводят его в рабочее положение, откладывают прямой угол APР ‘. По направлению РР’ от точки Р откладывают горизонтальное проложение d 2, получают точку К , закрепляют ее.
Способ полярных координат
Этот способ широко применяется при разбивке зданий , сооружений и конструкций с пунктов полигонометрических и теодолитных ходов при малом расстоянии между исходными и выносимыми пунктами. Положение точки К на местности определяют путем откладывания от твердой линии АВ угла β и по полученному направлению АК горизонтального проложения d. Угол β = α А — α AK , где α А , α АК — дирекционные углы линий АВ и АК соответственно.
Способ прямой угловой засечки
В этом способе положение проектной точки К ( рис. 1.48 ) определяют путем откладывания в опорных точках А и В от опорной линии АВ проектных углов β 1 и β 2 . Базисом b является сторона разбивочной сетки или его измеренное значение. Проектные углы β 1 и β 2 вычисляют как разность дирекционных углов сторон, которые определяют из решения обратной геодезической задачи на плоскости по проектным координатам исходных пунктов и определяемой точки.
Способ обратной угловой засечки
На местности находят приближенное положение К’ выносимой проектной точки К ( рис. 1.49 ). Над точкой К’ устанавливают теодолит и с требуемой точностью измеряют углы β 1 , β 2 как минимум на три опорные точки с известными координатами. По формулам обратной угловой засечки вычисляют координаты точки К’ и сравнивают их с проектными значениями. По разности координат определяют величины редукций Δх, Δу или угловой Ө и линейный е элементы и смещают точку в проектное положение К .
Способ линейной засечки
В этом способе положение проектной точки К на местности определяют в пересечении проектных расстояний d 1 и d 2 , его применяют в основном для разбивки осей строительных конструкций при d 1 и d 2 меньше длины мерного прибора. Одной рулеткой от А откладывают d 1 , а рулеткой от точки В отрезок d 2 . Пересечение отрезков d 1 и d 2 (при совмещении нулей рулеток с точками А и В ) дает определяемую точку К ( рис. 1.51 ).
Способ пересечения створов
В этом способе положение точки К определяют при пересечении створов Т 1 Т’ 1 и Т 2 Т’ 2 . Створы на местности задают точками их пересечения с опорными сторонами. Положение точек T 1 , Т 2 определяют горизонтальными проложениями d 1 и d 2 от опорной точки В по опорным линиям ВА и ВС, а точек Т’ 1 , Т’ 2 — d’ 1 , d’ 2 от опорной точки Е по линиям EF и ED . Способ пересечения створов ( рис. 1.52 ) обычно используют для выноса в натуру труднодоступных точек, когда использование других методов затруднено.
Способ бокового нивелирования
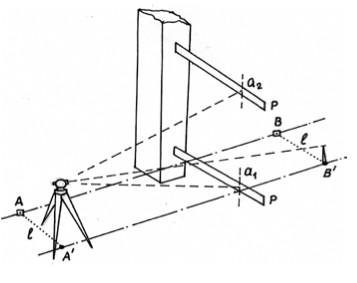
Этот способ часто применяют для выноса осей при детальной разбивке и для установки строительных конструкций в проектное положение ( рис. 1.53 ). Пересечение К линии АВ с конструкцией определяют следующим образом. От точек А и В по перпендикуляру к АВ откладывают отрезки l и получают точки А’, В’ и линию А’В’ , параллельную АВ . Над точкой А’ устанавливают теодолит, приводят его в рабочее положение и перекрестие нитей наводят на точку В’ . К конструкции в горизонтальном положении устанавливают рейку и перемещают ее так, чтобы отсчет по ней был равен l . Пятка рейки даст положение точки К . Подобным образом определяют и положение точки К’.
Источник
Способ линейной засечки




![]()
В способе линейной засечки положение выносимой в натуру точки С (рис. 8) определяют в пересечении проектных расстояний S1 и S 2, отложенных от исходных точек А и В. Этот способ обычно применяют для разбивки осей строительных конструкций в случае, когда проектные расстояния не превышают длины мерного прибора.
Наиболее удобно разбивку производить при помощи двух рулеток. От точки А по рулетке откладывают расстояние S1, а от точки В по второй рулетке — S2. Перемещая обе рулетки при совмещенных нулях с центрами пунктов А и В, на пересечении концов отрезков S1 и S 2 находят положение определяемой точки С.
Способ полярных координат
Способ полярных координат широко применяют при разбивке осей зданий, сооружений и конструкций с пунктов теодолитных или полигонометрических ходов, когда эти пункты расположены сравнительно недалеко от выносимых в натуру точек.
В этом способе положение определяемой точки С (рис. 10) находят на местности путем отложения от направления АВ проектного угла β и расстояния S. Проектный угол β находится как разность дирекционных углов аАВ и αAC, вычисленных как и расстояние S из решения обратных задач по координатам точек А, В и С. Для контроля положение зафиксированной точки С можно проверить, измерив на пункте В угол β ׳ ’ и сравнив его со значением, полученным как разность дирекционных углов аBА и αCA .
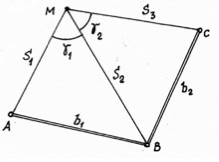
Если разбиваемая точка находится на значительном расстоянии от исходного пункта, то приходится несколько раз откладывать полярным способом проектные углы и расстояния, прокладывая проектный ход (рис. 11). При наличии прямой видимости с точки С на точку В для контроля измеряют примычные углы γ1 и γ2, образуя замкнутый угловой полигон. Поэтому такой способ называют способом проектного полигона. При точных разбивочных работах углы полигона уравнивают, вычисляют по ним и проектным расстояниям координаты точки С, сравнивают их с проектными и при необходимости редуцируют в проектное положение.
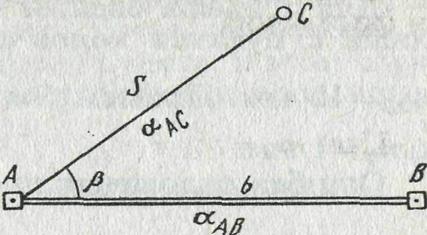
Рис. 10. Схема разбивки способом полярных координат
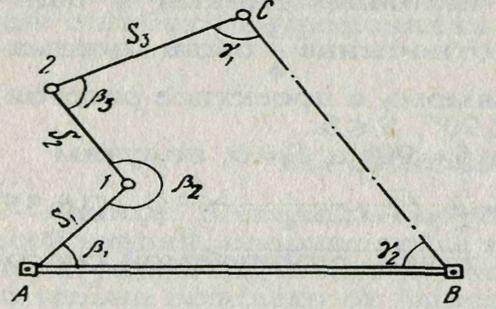
Рис. 11. Схема разбивки способом проектного полигона
При редкой разбивочной основе способ проектного полигона дожет быть использован для разбивки всех точек пересечения основных осей сооружения от одного исходного пункта. В этом случае проектный ход с проектными углами и расстояниями прокладывают полностью.
Источник
Основы геодезии
О геодезии и разный полезный материал для геодезистов.
Линейная засечка
От пункта A с известными координатами XA, YA измерено расстояние S1 до определяемой точки P, а от пункта B с известными координатами XB, YB измерено расстояние S2 до точки P .
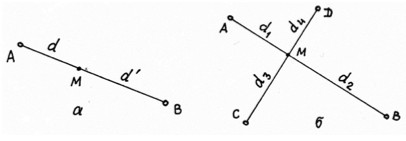
Графическое решение. Проведем вокруг пункта A окружность радиусом S1 (в масштабе чертежа), а вокруг пункта B – окружность радиусом S2; точка пересечения окружностей является искомой точкой; задача имеет два решения, так как две окружности пересекаются в двух точках (рис.2.9).
Исходные данные: XA, YA, XB, YB,
Измеряемые элементы: S1, S2,
Неизвестные элементы: X, Y.
Аналитическое решение. Рассмотрим два алгоритма аналитического решения, один – для ручного счета (по способу треугольника) и один – для машинного счета.

Алгоритм ручного счета состоит из следующих действий:
1. решение обратной геодезической задачи между пунктами A и B и получение дирекционного угла αAB и длины b линии AB,
2. вычисление в треугольнике ABP углов β1 и β2 по теореме косинусов:  (2.29)
(2.29)
3. вычисление угла засечки γ  (2.30)
(2.30)
4. вычисление дирекционных углов сторон AP и BP:
пункт P справа от линии AB  (2.31)
(2.31)
пункт P слева от линии АВ  (2.32)
(2.32)
5. решение прямых геодезических задач из пункта A на пункт P и из пункта B на пункт P:
1-е решение  (2.33)
(2.33)
2-е решение  (2.34)
(2.34)
Результаты обоих решений должны совпадать.
Алгоритм машинного решения линейной засечки состоит из следующих действий:
1. решение обратной геодезической задачи между пунктами A и B и получение дирекционного угла αAB и длины b линии AB,
2. введение местной системы координат X’O’Y’ с началом в точке A и осью O’X’, направленной вдоль линии AB, и пересчет координат пунктов A и B из системы XOY в систему X’O’Y’:  (2.35)
(2.35)
3. запись уравнений окружностей в системе X’O’Y’:  (2.36)
(2.36)
и совместное решение этих уравнений, которое предусматривает раскрытие скобок во втором уравнении и вычитание второго уравнения из первого:  (2.37)
(2.37)
откуда  (2.38)
(2.38)
Если искомая точка находится слева от линии AB, то в формуле (2.39) берется знак “-“, если справа, то “+”.
4. пересчет координат X’ и Y’ точки P из системы X’O’Y’ в систему XOY по формулам (2.2):  (2.40)
(2.40)
Источник
Способы разбивочных работ
Способ прямой и обратной угловых засечек. Чаще всего эти способы применяют для выноса недоступных точек, а также точек, находящихся на значительных расстояниях от геодезической основы.
В способе прямой угловой засечки (см. рис. а) положение точки М определяют с исходных пунктов А и В геодезической основы построением в каждой из них горизонтальных углов β1 и β2, которые являются разбивочными элементами. Указанные углы строят на местности по правилам, изложенным в § 88. В данной схеме целесообразно использовать одновременно два теодолита. При этом положение проектной точки фиксируют по команде двух наблюдателей при положениях КЛ, а затем – при положениях КП. После фиксирования среднего положения точки М выполняют контрольное измерений углов β1 и β2.
Необходимо иметь в виду, что величина угла γ при точке М не должна быть малой и слишком большой. Оптимальным углом, при котором вынос точки может быть выполнен с меньшей погрешностью, является γ ≈109 0 − 110 0 при примерно равных расстояниях от исходных точек до точки М. То есть следует стремиться обеспечить симметричную схему построения точки М. Кроме того, для повышения точности построения проектной точки, а также для контроля её построения, вынос проектной точки на местность выполняют часто с двух базисов геодезической разбивочной основы.
Во многих случаях бывает сложно из одного приема вынести точку М с заданной точностью в её проектное положение. В таких случаях используют способ замкнутого треугольника. Вынос точки осуществляют последовательными приближениями. Для этого с максимально возможной точностью выполняют построение точки М, затем несколькими приёмами измеряют все углы треугольника, уравнивают углы и вычисляют координаты точки М из решения по формулам прямой угловой засечки. Полученные координаты сравнивают с проектными и при недопустимых отклонениях в их значениях определяют поправки (редукции) в положение точки М и смещают последнюю в проектное положение. Для контроля снова измеряют углы и выполняют аналогичные вычисления.
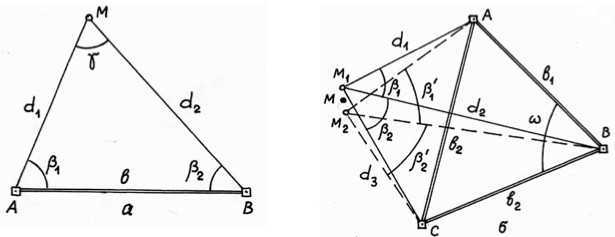
Вынос проектной точки способами прямой и обратной угловых засечек: а) способ прямой угловой засечки; б) способ обратной угловой засечки
Вынос на местность проектной точки способом полярных координат
Вынос на местность проектной точки способом проектного полигона
Метод последовательных приближений используют и в способе обратной угловой засечки (см. рис. б). Предварительно точку М выносят на местность и измеряют при ней углы β1 и β2. По формулам обратной угловой засечки определяют координаты точки М и сравнивают их с проектными. При необходимости положение точки М редуцируют на величины отклонений по координатам Х и Y, точку М фиксируют в положении М2 и снова уже в новой точке измеряют горизонтальные углы β а затем вычисляют координаты новой точки М. Все указанные действия выполняют до тех пор, пока задача качественного построения проектной точки не будет решена.
Способ полярных координат используют в тех случаях, когда проектные точки находятся сравнительно недалеко от точек геодезической основы. При этом предпочтительно, чтобы расстояния до них не превышали длины мерного прибора (ленты или рулетки).
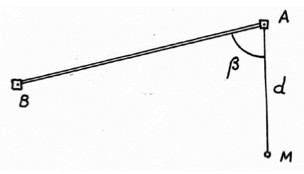
На местности от исходного направления АВ (см. рис.) строят проектный угол β и проектное расстояние d, которые в данном способе являются разбивочными элементами.
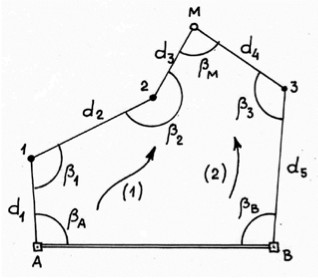
Проектная точка может находиться далеко от точек геодезической основы или не может быть вынесена по техническим условиям способами угловой засечки. В таких случаях к точке прокладывают полигонометрический ход (см. рис.), используя для этого последовательно расчётные проектные углы и проектные расстояния. Данный способ называют способом проектного полигона.
По двум ходам от базисной линии АВ геодезической основы получают два положения точки М из решения ходов (1) и (2). В качестве первого приближения вычисляют средние значения координат проектной точки. Затем в полученной точке М измеряют угол βМ и линии d3 и d4 и вычисляют координаты точки М в общей схеме замкнутого полигона. Если координаты точки М будут значительно отличаться от проектных, то определяют поправки (редукции) в положение точки М, точку смещают и снова измеряют угол βМ и линии d3 и d4. Из решения хода находят координаты точки М и сравнивают их с проектными. Такие действия выполняют до достижения необходимой точности построения проектной точки.
Вынос на местность проектной точки способом линейной засечки
Способы створных засечек: а) способ створно-линейной засечки; б) способ створной засечки
При небольших расстояниях от проектной точки до точек геодезической основы удобно использовать способ линейной засечки, реализуемый с помощью двух или трёх рулеток (см. рис.). Разбивочными элементами в этом способе являются только расстояния S или горизонтальные проложения.
Для выноса осей сооружений удобно использовать способы створных засечек (см. рис.).
В схеме створно-линейной засечки (см. рис. а) положение точки М определяют на линии створа, образованного пунктами А и В геодезической основы. По линии створа проектным расстоянием d задают положение искомой точки М. При необходимости положение точки М может быть проконтролировано с другой точки створа. В точке А створа устанавливают теодолит, а в точке В – визирную цель (на штативе, с возможностью центрирования и горизонтирования).
В схеме створной засечки (см. рис. б) точку М задают на линии пересечения створов АВ и СD. Для повышения точности работу целесообразно выполнять одновременно двумя теодолитами и двумя визирными целями несколькими приёмами с перестановкой теодолитов и визирных целей. Для контроля измеряют расстояния от построенной точки до исходных пунктов геодезической основы.
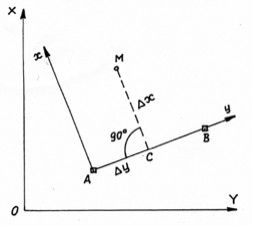
Обычно на строительной площадке имеется т.н. строительная сетка. В её системе координат задано положение всех осей (главных, основных и т.д.), а также всех главных (узловых) точек. В этом случае вынос проектных точек осуществляется в системе координат строительной сетки по приращениям координат Δx и Δy (см. рис.). В общегосударственной или местной системах координат ХОY используется система координат хАy строительной сетки c началом координат в точке А. Ось Аy задается исходным направлением на другую исходную точку (В) геодезической основы. Положение точки М определяется расстояниями Δx и Δy, т.е. приращениями координат в системе координат строительной сетки.
Разбивка точек сооружения от строительной сетки
Способ бокового нивелирования
Предварительно строят проектное расстояние Δy, устанавливают в полученной точке С теодолит, строят проектный угол β, равный 90 0 на точку М и в полученном направлении откладывают отрезок Δx. Для обеспечения более высокой точности построения точки меньшее из Δx и Δy следует строить в виде перпендикуляра, а большее – по створу исходной линии.
Вынос вертикальных осей конструкций выполняют способом бокового нивелирования (см. рис.). От оси АВ, на которой находится строительная конструкция, например, колонна, а небольшом расстоянии l строят линию А’В’, параллельную исходной линии АВ. В точке А’ устанавливают теодолит, который визируют на марку, находящуюся в точке В’. Перпендикулярно к оси колоны последовательно на её основание и верх устанавливают рейку Р (с уровнем, ориентированным осью по продольной оси рейки) и берут отсчёты а1 и а2 по вертикальной нити сетки зрительной трубы. Равенство указанных отсчётов определяет вертикальность оси колонны. Если расхождение между отсчётами недопустимо, то положение вертикальной оси колонны выправляют.
Оставьте свой отзыв, комментарий или задайте вопрос
Источник



