
Измерение скоростей вращения
Скорость вращения — важнейший параметр различных турбин, насосов, генераторов, двигателей и других агрегатов теплотехнических систем. Принято скорость вращения выражать частотой вращения п или угловой скоростью . В тех случаях, когда требования к точности измерений невысоки и допустим определенный отбор мощности от вращающегося вала, находят применение тахометры неэлектрического принципа действия, которые относятся к одной из групп — механического или гидравлического принципа действия. Наибольшее распространение в стационарных установках находят центробежные механические тахометры, принцип действия которых основан на регистрации перемещения тяжелого тела (или тел) под действием центробежной силы, возникающей при его вращении (рис. 72).
Рис. 72. Типы центробежных тахометров:
а — с раздельными грузами; б — с грузовым кольцом:
1 — вращающаяся ось; 2 — грузы; 3 — массивное кольцо; 4 — скользящая муфта; 5— противодействующая пружина; 6 — передаточный механизм;
7 — стрелочный указатель
Перемещению тела обычно препятствуют силы, развиваемые каким-либо упругим элементом (например, пружиной). Вследствие того, что центробежные силы пропорциональны квадрату скорости вращения, а упругие противодействующие силы зависят от перемещения линейно, ради получения — приблизительно линейных шкал приходится усложнять механизм передачи движения от движущегося тела к стрелке-указателю. Центробежные тахометры имеют значительную температурную погрешность, возникающую из-за изменения модуля упругости материала пружин. Кроме того, они обладают существенным эксплуатационным недостатком, связанным с необходимостью применения трансмиссии (гибкого вала и т. п.). Для центробежных тахометров характерна погрешность вопределений скорости вращения от . Стационарные центробежные тахометры типа ТС имеют погрешность ±1%, а ручные переносные измерители частоты вращения типа ИО-10 и ИО-11, характеризуются погрешностью ±2%.
Резонансные тахометры представляют собой пакет тонких стальных пластин, подобранных так, что у любых двух соседних пластинчастоты собственных колебаний отличаются друг от другана 0,5или на 0,25 Гц. Один конец пластин заделан жестко в корпус тахометра, второй конец свободен. При вращении крупных массивных роторов за счет малых эксцентриситетов возникают биения с частотой, кратной частоте вращения. Вибрации статоров, вызванные биением, воспринимаются одной или несколькими пластинами, которые резонируют на собственной частоте. Шкала прибора наносится у свободных концов пластин. Подобные приборы чрезвычайно просты, не требуют связи с вращающейся деталью, но обладают большой погрешностью , имеют низкую чувствительность и ограниченный рабочий диапазон.
Фрикционные механические тахометры применяются при создании различных поверочных установок, используемых при регулировке механических тахометров, их градуировке и поверке. Свое название они получили в связи с использованием в конструкции бесступенчатых фрикционных редукторов с непрерывно изменяемым передаточным отношением. С помощью таких редукторов осуществляется привод стрелки-указателя от двигателя с известной частотой вращения. Соосно со стрелкой-указателем расположена стрелка, связанная трансмиссией с валом, частота вращения которого измеряется. Перестройкой передаточного отношения фрикционного редуктора добиваются синхронного вращения обеих стрелок, т. е. совпадения неизвестной частоты вращения с редуцированной известной. Шкала в размерности nнаносится непосредственно на элемент, управляющий положением фрикционного колеса.
Фрикционные гидравлические или пневматические тахометры основаны наиспользовании вязкого трения для передачи усилия от вращающейся детали к укрепленной на пружине поворачивающейся детали-указателю. Вращающаяся и поворачивающаяся части выполняются в виде плоских дисков, чашек, колец или концентрично расположенных цилиндров. Зависимость между величиной углового перемещения указателя и частотой вращения привода может быть линейной (при малых числах Re в зазоре) или квадратичной.
Напорные гидравлические ипневматические тахометры являются наиболее точными неэлектрическими тахометрами. По конструкции они представляют собой сильно упрощенный центробежный насос или центробежный компрессор, помещенный в замкнутую камеру с жидкостью или воздухом. При вращении насоса или компрессора от трансмиссии, связанной с валом, частота вращения которого измеряется, на периферии камеры создается напор, служащий измерительным сигналом.
Для измерения величины этого напора могут быть использованы различные устройства. Так, например, в гидравлическом жидкостном тахометре с приведенной погрешностью ±0,5% напор измеряется с помощью жидкостного манометра (вертикальной трубки), градуированного опытным путем. В пневматическом тахометре воздушный поток, создаваемый компрессором, выходит из камеры через специальное отверстие и отклоняет легкую поворачивающуюся пластинку, связанную со стрелкой и уравновешенную спиральной пружиной. Такой тахометр применяется для измерения частот вращения выше 400 1/мин и имеет погрешность при индивидуальной градуировке около ±3…5%
Все напорные тахометры имеют нелинейную статическую характеристику и чувствительны к изменению температуры рабочей жидкости. Неэлектрические тахометры непригодны для измерения быстропеременных скоростей вращения и поэтому все реже применяются исследовательской работе. Электрические методы измерения скоростей вращения обеспечивают лучшие характеристики при меньшем отборе энергии от валов объектов и, кроме того, позволяют осуществлять измерение и регистрацию дистанционно при помощи универсальной аппаратуры.
Частотой вращения — измеряемой величиной — легко модулируется практически любой параметр электрического тока. Наиболее широкое распространение получили тахометры с амплитудной и частотной модуляцией измерительного сигнала. Примерами электрических тахометров с амплитудной модуляцией могут служить тахогенераторы постоянного или переменного тока, и магнитный тахометр. Схема тахометров постоянного тока состоит из генератора постоянного тока, связанного с рабочим валом, и измерительного прибора (в большинстве случаев используется обычный вольтметр магнитоэлектрической системы). Электродвижущая сила генератора постоянного тока прямо пропорциональна частоте вращения, благодаря чему шкала прибора оказывается линейной.

Принцип действия магнитного тахометра основан на явленииэлектромагнитной индукции, сущность которого заключается в том, что в результате взаимодействия вращающегося магнитного, поля с индукционными токами, наведенными этим полем в сплошном металлическом роторе возникают силы, пропорциональные частоте вращения. Магнитные тахометры — наиболее точные из приборов с амплитудной модуляцией сигнала, они выполняются как с механической, так и с электрической дистанционной связью указателя с объектом вращения. Наибольшее распространение эти тахометры получили в авиации и турбостроении.
Рис. 73. Принципиальная схема магнитного тахометра:
1 — магнит первичного преобразователя (генератора); 2— магнит-ротор синхронного двигателя; 3 — гистерезисный диск; 4 — постоянный магнит указателя; 5 — разгонный диск; 6 — противодействующая пружина; 7 — магнит демпфера; 8 — диск демпфера; 9— стрелка; 10— обмотка генератора; 11 — статорная обмотка синхронного двигателя
Диапазон измерении одной из модификаций подобного тахометра — от 0 до 15000 1/мин. Погрешность измерения при нормальной температуре в диапазоне 1000 — 11000 1/мин не превышает ± 1 %, а в диапазоне 11000 — 15000 1/мин — не более ±0,5%. При наличии в подобных тахометрахтемпературныхкомпенсаторов (магнитных шунтов), балансировке подвижной системы измерителя и достаточно большой шкале погрешность магнитных тахометров может быть снижена до ±0,2% от измеряемой величины.
Тахометры на основе первичных преобразователей с частотной модуляцией сигнала отличаются простотой конструкции, высокой точностью и независимостью результатов измерений от внешних условии. В качестве первичных преобразователей таких тахометров могут быть использованы устройства различного принципа действия, состоящие из двух элементов: подвижного и неподвижного, взаимное расположение которых способно вызвать изменение электрического сигнала во внешней цепи прибора. Если подвижный элемент жестко закреплен на вращающемся со скоростью валу радиуса r, то изменения сигнала будут следовать друг за другом через периоды времени , а частота таких изменений сигнала будет равна .Частота f может быть повышена за счет установки на валу нескольких элементов, делящих длину окружности на некоторое число отрезков m, тогда . Для всех подобных первичных преобразователей характерны две принципиальные причины погрешностей. Во-первых, это неточность определения сходственных моментов цикла, определяющих длительность периода . Для ее уменьшения необходимо формировать как можно более резкие фронты изменения электрического сигнала. Во-вторых, у преобразователей с несколькими возбуждающими элементами погрешности измерения долей оборотов возникают за счет неточности деления длины окружности на т равных участков. Простейшим тахометром с первичным преобразователем частотного типа является импульсный тахометр, состоящий из переключателя (неподвижный элемент), кулачка или выступа на валу (подвижный элемент). Переключатель управляет зарядом и разрядом рабочего конденсатора (рис. 74); протекающий при этом ток измеряется стрелочным магнитоэлектрическим прибором. При каждом разряде конденсатора через измеритель протекает ток,- величина которого изменяется по экспоненциальному закону . Здесь Е — разность потенциалов на зажимах конденсатора; t — время. Величина является постоянной времени процесса разряда; практически процесс разряда можно считать полностью закончившимся по истечении времени .Отсюда могут быть выбраны параметры цепи такими, чтобы исключалось влияние переходного сопротивления контактов. Время замкнутого состояния контактов при наибольшей измеряемой скорости вращения должно быть больше или равно . Если емкость заряжается и разряжается каждый раз полностью, то среднее значение тока, протекающего через измеритель, будет равно Iср =ECf, где f — частота переключений. Рабочий диапазон прибора можно изменять путём переключения рабочих конденсаторов. Импульсные электрические тахометры позволяют измерять скорости вращения с погрешностями от ±0,5 до ±1,5%. При механической коммутации цепей перезаряда конденсатора верхний предел измерений не может быть выше 2500—3000 1/мин. Повышение этого предела возможно при использовании бесконтактных первичных преобразователей для управления переключателем немеханического типа.
Рисунок 74 Принципиальная схема импульсного тахометра
Светолучевые первичные преобразователи тахометров, выполняются в двух принципиальных вариантах: фотоэлектрических модуляторных систем или стробоскопических тахометров. Действие фотоэлектрических преобразователей основано на модуляции освещенности рабочей поверхности фотоэлектрического элемента (фотодиода, фотоумножителя или фоторезистора) дискретными возбудителями сигнала, жестко связанными с валом объекта. В качестве возбудителей могут использоваться отверстия в специальном диске-модуляторе, отверстия в рабочем валу, заслонки, зеркала или светоотражающие метки, нанесенные на вал. Фотосопротивление подключается последовательно с сопротивлением нагрузки и источником постоянной э. д. с. . Если фотосопротивление не освещено, то по нему течет «темновой» ток ,
где — темновое сопротивление фоторезистора. Когда фотоэлемент освещен, то по нему течет «световой» ток
Так как проводимость фоторезистора при облучении его световым потоком растет, то , а уровень рабочего сигнала определяется разностью
Частота сигнала зависит от скорости вращения модулятора света и числа возбудителей, расположенных на модуляторе. Основными достоинствами фотоэлектрических преобразователей являются простота конструкций, отсутствие тормозящих моментов на валу объекта, независимость амплитуды сигнала от скорости вращения и возможность использования универсальных блоков в составе измерительной цепи тахометра.
При стробоскопическом методе измерения скоростей вращения используется способность глаза наблюдателя удерживать в течение некоторого времени зрительное впечатление от предмета, уже скрывшегося из поля зрения. Известны два типа стробоскопических тахометров; стробоскопы с механическим затвором и стробоскопысо световой вспышкой. В первых наблюдение за вращающимся валом или диском с отметками осуществляется через узкое отверстие в неподвижном экране; между этим экраном и валом объекта помещен диск с несколькими отверстиями, который приводится во вращение небольшим двигателем с плавно регулируемой скоростью. Наблюдатель может видеть испытуемый вал лишь в те мгновения, когда против отверстия в экране оказывается одно из отверстий диска. При равенстве или кратности скоростей вращения диска и вала последний будет казаться наблюдателю неподвижным.
В стробоскопических тахометрах вал объекта с метками на его поверхности периодически освещается безынерционным источником света (газосветной лампой). При частоте вспышек, синхронной с частотой вращения вала, последний кажется неподвижным. Резкость очертания «остановленного» объекта увеличивается с уменьшением времени рассматривания; качество видимости, очевидно, зависит от освещенности объекта. Поэтому лучшие результаты получаются в стробоскопах при использовании мощных газоразрядных ламп.
Рис. 76. Схема индуктивного тахометра:
1 — вал объекта; 2 — генератор высокой частоты; 3 — демодулятор; 4 — частотомер
Источник
МЕТОДЫ ИЗМЕРЕНИЯ УГЛОВОЙ СКОРОСТИ ВРАЩЕНИЯ ВАЛА




![]()
![]()
Рассмотрим следующие методы измерения угловой скорости вращения вала: центробежный, часовой, фрикционный, магнитный, индукционный, импульсный, стробоскопический и метод дифференцирования.
1. Центробежный метод [1]
Центробежный метод основан на зависимости центробежных сил от угловой скорости вращения инерционной массы.
Существуют две типовые схемы центробежных тахометров — тахометр конического типа и с кольцевым грузом.
В тахометре конического типа на вращающейся оси при помощи шарниров прикреплено несколько грузов (два, три или четыре), которые при наличии угловой скорости развивают центробежные силы и симметрично расходятся, перемещая вдоль оси муфту и сжимая пружину до тех пор, пока ее упругая сила не уравновесит центробежные силы (рис. 8.1, а).
Зависимость перемещения s муфты от угловой скорости  выражается формулой [1]
выражается формулой [1]
 ,
,
где n – число грузов,
m – масса одного груза,
с1 – коэффициент линейной жесткости пружины,
z0 – длина пружины в свободном состоянии,
r0 и l – размеры, обозначенные на рис. 8.1.
Для малых перемещений можно пренебречь величиной s по сравнению с z0 и тогда
 .
.
Из выражения (8.2) следует, что центробежный тахометр обладает квадратичной характеристикой.
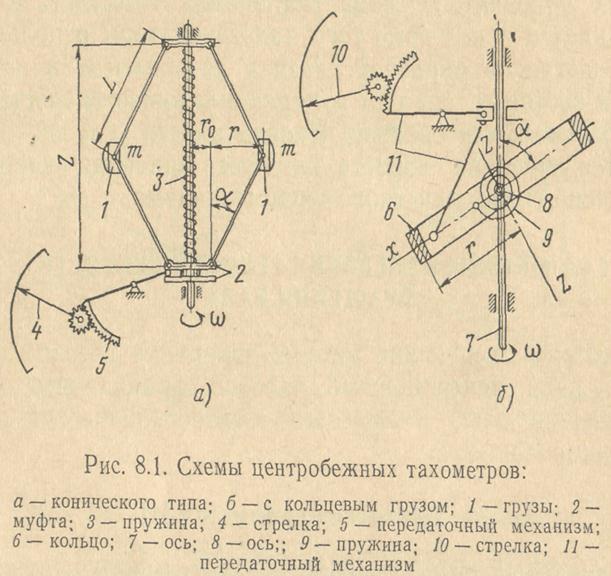
Схема центробежного тахометра с кольцевым грузом изображена рис. 8.1, б. На оси, связанной с контролируемым валом, помещен кольцевой груз, имеющий дополнительную степень свободы относительно поперечной оси, вращающейся вместе с основной осью. Когда кольцевой груз расположен под некоторым углом, а к основной оси (см. рис. 8.1, б), возникающие при его вращении инерционные силы создают вращающий момент Мвр относительно поперечной оси и стремятся повернуть кольцо так, чтобы его плоскость была перпендикулярна оси вращения. Вращающему моменту Мвр противодействует момент Мпр спиральной пружины; равновесие наступает при равенстве Мпр = Мвр, чему соответствует некоторый угол  .
.
Зависимость угла от угловой скорости для тахометра с кольцевым грузом также является квадратичной.
В динамическом отношении чувствительный элемент тахометра с кольцевым грузом, так же как и тахометра конического типа, в случае применения воздушного демпфера является колебательным звеном 3-го порядка (см.стр. 54).
2. Часовой метод [3]
Часовой метод измерения угловой скорости основан на зависимости угла поворота вала за фиксированный промежуток времени от угловой скорости его вращения.
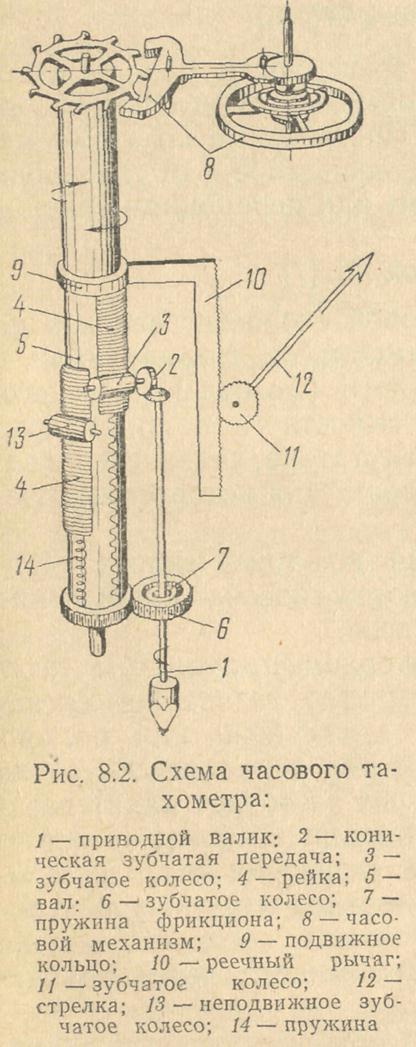
В часовых тахометрах временной интервал задается с помощью часового механизма, а величина накопленного за этот промежуток времени угла поворота вала передается на указывающую стрелку (рис. 8.2).
Часовые тахометры имеют линейную характеристику, их особенность — дискретность измерения (определение результата за контрольный интервал времени).
3. Фрикционный метод [3]
Фрикционный метод измерения угловой скорости основан на самовыравнивании (за счет трения
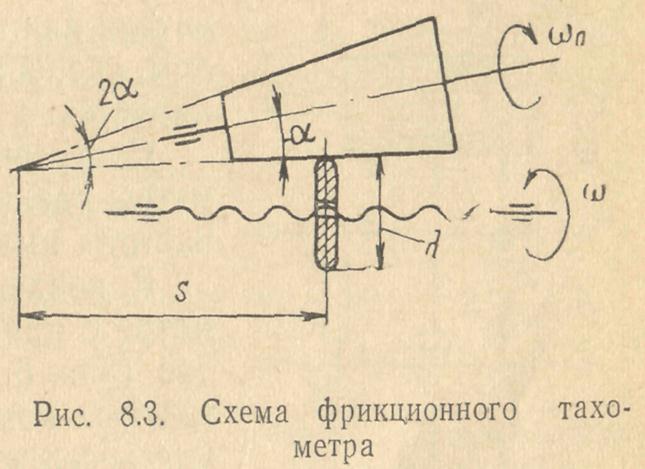
скольжения) окружной скорости вращения фрикционного ролика с окружной скоростью конуса, вращающегося с постоянной угловой скоростью  . Мерой измеряемой
. Мерой измеряемой
угловой скорости является величина s расстояния ролика от
вершины конуса (рис. 8. 3):
 ,
,
где d – диаметр ролика,
— угол конуса.
4. Магнитоиндукционный метод [1]
Магнитоиндукционныи метод основан на увлечении проводящего тела (цилиндра, диска и др.) полем вращающегося постоянного магнита благодаря взаимодействию наводимых в проводящем теле индукционных токов с магнитным полем постоянного магнита.
Построенные по этому методу магнитоиндукционные (магнитные) тахометры подробно рассматриваются в § 8.3.
5. Индукционныйметод [4], [5]
Индукционный метод основан на зависимости э. д. с, наводимой полем постоянного магнита в обмотке, от угловой скорости вращения магнита или обмотки. Построенные по этому методу тахогенераторы описаны в § 8.4; в зависимости от схемы они могут выдавать сигналы на постоянном или переменном токе.
6. Импульсный метод[2], [7]
Импульсный метод измерения угловой скорости основан на определении частоты электрических импульсов, формируемых с помощью контактного или бесконтактного (фотоэлектрического,

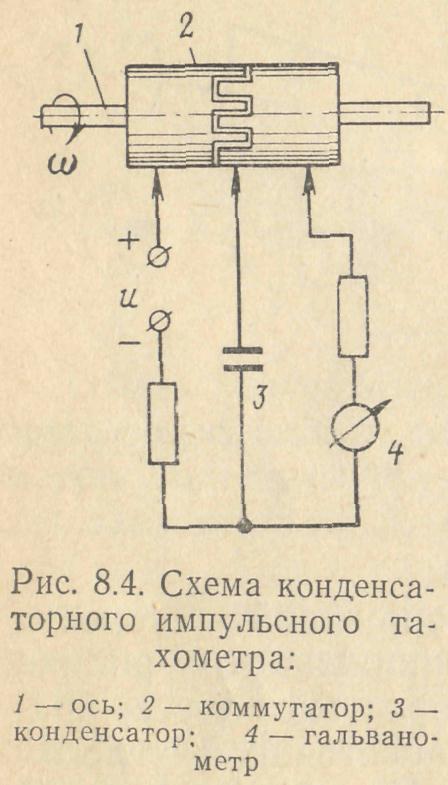
индуктивного, емкостного и др.) прерывателя или коммутатора, связанного с валом, скорость вращения которого контролируется.
Построенные по этому методу тахометры различаются способами измерения частоты импульсов.
В конденсаторном импульсном тахометре с прямым преобразованием сигналов (рис. 8.4) контактный или бесконтактный коммутатор периодически (один или несколько раз за оборот вала) переключает конденсатор на заряд от источника питания и на разряд через измеритель тока (гальванометр). Мерой угловой скорости служит среднее значение силы тока, протекающего через гальванометр.
В конденсаторном импульсном тахометре компенсационного типа среднее
значение напряжения, создающегося на конденсаторе при его периодической коммутации, уравновешивается (автоматически) с помощью самобалансирующейся мостовой схемы со следящим электроприводом.
Для повышения точности измерения используются стабильные слюдяные конденсаторы с температурным коэффициентом емкости не более 50• 10 -6 на 1 0 С.
В импульсных тахометрах в качестве коммутатора может быть использован тахогенератор переменного тока с вращающимся магнитом; синусоидальное напряжение, выдаваемое тахогенератором, используется для управления полупроводниковыми ключами.
7. Стробоскопический метод [6]
Стробоскопический метод основан на явлении кажущейся неподвижности вращающегося тела при его периодическом наблюдении в течение коротких промежутков времени с частотой, равной или кратной частоте вращения (числу оборотов за 1 сек).
Различают стробоскопы с механическим затвором, через который наблюдается вращающееся тело, с механическим обтюратором, прерывающим луч света, освещающий вращающееся тело, и с электронной схемой, управляющей частотой вспышек осветительной газонаполненной лампы, освещающей вращающееся тело.
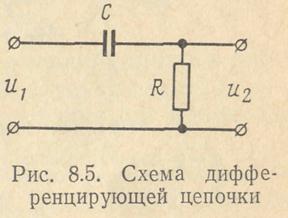
8. Метод дифференцирования
Метод дифференцирования основан на дифференцировании сигнала позиционного датчика (потенциометрического, индуктивного или др.).
Метод применим при ограниченной величине углового перемещения контролируемого вала; примером простейшей схемы является пассивная цепочка R—С (рис. 8.5), дифференцирующая напряжение
постоянного тока, снимаемое с потенциометра.
Передаточная функция такого дифференциатора
 ,
,
где Rn — внутреннее сопротивление потенциометра.
Для построения дистанционных тахометров на летательных аппаратах используется в основном магнитоиндукционный метод благодаря его простоте и линейной зависимости показания прибора от угловой скорости.
В качестве датчиков систем автоматического управления и следящих систем используются тахогенераторы постоянного и переменного тока, основанные на индукционном методе.
В устройствах с ограниченной величиной перемещения вала применяют иногда схемы электрического дифференцирования.
Определенную перспективу имеют импульсные методы, особенно в связи с развитием цифровых вычислительных машин.
Центробежный, часовой, фрикционный и стробоскопический методы измерения угловой скорости вращения вала не получили развития на летательных аппаратах по тем или другим причинам (громоздкость, неудобства монтажа, трудность автоматизации измерений, нелинейность характеристик, увеличенные погрешности и т. п.).
Рассмотрим более подробно магнитоиндукционные тахометры и тахогенераторы.
§ 8.3. МАГНИТОИНДУКЦИОННЫЕ ТАХОМЕТРЫ 1. Схемы и характеристики магнитоиндукционных тахометров
Применяются два варианта магнитоиндукционных тахометров — с цилиндрическим чувствительным элементом и с дисковым (рис. 8.6).
В первом варианте (см. рис. 8.6, а) на вращающейся оси укреплена магнитная система, состоящая из постоянного магнита с одной, двумя или тремя парами полюсов и кольцевого экрана из мягкого железа, через который замыкается магнитный поток магнита.
В кольцевом воздушном зазоре между магнитом и экраном расположен тонкостенный токопроводящий цилиндр, укрепленный на отдельной оси, соосной с осью магнитной системы. Ось цилиндра несет на себе также указывающую стрелку и связана со- спиральной противодействующей пружиной.
При вращении магнитной системы с угловой скоростью а в токопроводящем цилиндре наводится электродвижущая сила е, вызывающая ток I, замыкающийся в теле цилиндра; в результате взаимодействия тока i с магнитным полем постоянного магнита создается движущий момент Мяв, стремящийся увлечь цилиндр вслед за вращающейся магнитной системой; этому препятствует пружина, развивающая противодействующий момент Мпр. В результате подвижная система (цилиндр вместе с указывающей стрелкой) поворачивается на некоторый угол  , величина которого определяется равновесием моментов Мпр = Мдв.
, величина которого определяется равновесием моментов Мпр = Мдв.
Зависимость  является статической характеристикой (уравнением шкалы) прибора. Для определения этой зависимости рассмотрим картину протекания индукционных токов на схеме на рис. 8.7, а, где изображена поверхность цилиндра, развернутая в виде токопроводящей ленты.
является статической характеристикой (уравнением шкалы) прибора. Для определения этой зависимости рассмотрим картину протекания индукционных токов на схеме на рис. 8.7, а, где изображена поверхность цилиндра, развернутая в виде токопроводящей ленты.
Будем считать магнитную систему неподвижной, а ленту — движущейся с линейной скоростью  —, где D — диаметр цилиндра.
—, где D — диаметр цилиндра.
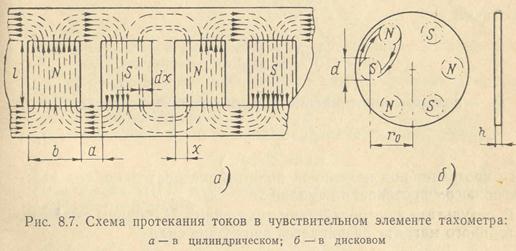
Магнитный поток пронизывает ленту перпендикулярно к плоскости чертежа; области, внутри которых действует поток, ограничены на схеме прямоугольниками, изображающими проекции полюсов постоянного магнита на поверхность ленты.
Выделим в ленте над поверхностью полюса, на расстоянии х от его края, узкую полоску шириной dx и толщиной  , равной толщине стенки цилиндра.
, равной толщине стенки цилиндра.
При движении ленты со скоростью v в полоске будет наводиться э. д. с.
 ,
,
где В — магнитная индукция в рабочем зазоре;
l — длина полюса постоянного магнита.
Поскольку магнитный поток над соседним полюсом имеет противоположное направление, то э. д. с, наводимая в аналогичной полоске, расположенной на расстоянии х от края соседнего полюса, будет такой же величины, т. е. е2=е1.
В итоге под действием э. д. с. е1 и е2 образуется короткозамкнутый элементарный виток тока
 .
.
Источник



