способ измерения скорости потока жидкости или газа
Классы МПК:
G01P5/12 с использованием изменения сопротивления нагретого проводника G01F1/68 с использованием теплового эффекта
Автор(ы):
Купер Виталий Яковлевич (RU) , Рубцов Михаил Геннадьевич (RU) , Хозинский Евгений Федорович (RU) , Шамихин Александр Николаевич (RU)
Патентообладатель(и):
Общество с ограниченной ответственностью «Научно-технический центр ГеоПАЛС» (RU)
Приоритеты:
Изобретение предназначено для использования при измерениях скорости потока жидкости или газа с помощью термоанемометров. В потоке располагаются термочувствительный преобразователь для измерения температуры потока и термочувствительный преобразователь с подогревателем для измерения скорости потока (термоанемометр) и осуществляется измерение температуры среды и температуры термоанемометра. Если разность температур термочувствительных преобразователей (перегрев) находится в пределах заданного диапазона, то мощность нагрева постоянна, а при изменении скорости потока изменяется перегрев; если же перегрев термоанемометра выходит за пределы заданного диапазона, то мощность нагрева изменяется до попадания перегрева в заданный диапазон. Значение измеряемой скорости потока вычисляется по формуле с учетом измеренного перегрева и мощности нагрева. Техническим результатом является повышение точности измерения скорости потока в широком диапазоне скоростей и температур при высоком быстродействии.
Формула изобретения
Способ измерения скорости потока жидкости или газа, в котором в измеряемом потоке располагают термочувствительный преобразователь для измерения температуры потока и термоанемометр, измеряют перегрев как разность температур термоанемометра и среды, управляют мощностью нагрева и вычисляют скорость потока, отличающийся тем, что задают диапазон допустимых перегревов и, если перегрев находится в пределах указанного диапазона, мощность нагрева не изменяется, а если перегрев выходит за пределы указанного диапазона, то мощность нагрева изменяют до попадания перегрева в заданный диапазон, при этом значение измеряемой скорости потока вычисляют по формуле V=k(P/-с) d , где V — скорость потока, Р — мощность нагрева, =Т т -Т c , Т т — температура термоанемометра, Т c — температура среды, k, с. d — постоянные коэффициенты, зависящие от теплофизических свойств среды, конструкции термоанемометра и числа Рейнольдса.
Описание изобретения к патенту
Изобретение предназначено для использования при измерениях скорости потока жидкости или газа с помощью термоанемометров.
Известны способы измерения скорости потока и расхода жидкости или газа, основанные на применении термоанемометров [1; 2].
Целью изобретения является повышение точности измерения скорости потока в широком диапазоне скоростей и температур при высоком быстродействии.
Известно [1; 2], что рассеиваемая термоанемометром мощность и его температура в установившемся режиме конвективного теплообмена связаны формулой
где Р — мощность,
S — площадь поверхности,
Т т — температура термоанемометра,
Т с — температура среды.
Коэффициент теплоотдачи зависит от скорости потока жидкости или газа. Эта зависимость описывается формулой (1)
где V — скорость потока,
a, b, n — коэффициенты, зависящие от теплофизических свойств среды, конструкции термоанемометра и числа Рейнольдса.
Один из известных способов измерения скорости потока с помощью термоанемометров основан на стабилизации мощности Р (или силы тока) нагрева [1]. При изменении скорости потока изменяется температура термоанемометра. В этом случае измеряются температуры термоанемометра Т т и среды Т с , определяется перегрев =Т т -Т с , затем на основе формул (1) и (2) вычисляется скорость V при Р=const. Недостатком указанного способа является то, что с увеличением скорости потока V перегрев уменьшается, что не позволяет обеспечить высокую точность измерений в большом диапазоне скоростей.
Другой известный способ измерения скорости потока основан на стабилизации температуры T т (сопротивления) термоанемометра [1]. При изменении скорости потока изменяется мощность нагрева Р, которая измеряется. В этом случае необходимо также измерять и компенсировать влияние изменений температуры среды, что существенно осложняет применение данного способа в большом диапазоне изменения температуры среды.
В широком диапазоне изменения скоростей и температур лучшие результаты обеспечивает способ измерения, основанный на стабилизации перегрева =Т т -Т с . Этот способ наиболее близок к предлагаемому. На его основе построено, например, термоане-мометрическое устройство, описанное в патенте RU №2017157 [3]. В указанном устройстве стабилизируется перегрев , а выходной величиной является мощность нагрева термоанемометра.
Однако указанный способ также имеет существенные недостатки. Во-первых, погрешность измерения скорости потока в значительной мере определяется погрешностью стабилизации перегрева, которая в свою очередь зависит от погрешностей всех звеньев, входящих в контур автоматического регулирования. В связи с этим практически не возможно обеспечить высокую точность измерений в большом диапазоне изменения скорости и температуры среды.
Так например, в термоанемометрическом устройстве [3] погрешность стабилизации перегрева вызывается следующими причинами:
— не идентичностью функций преобразования трех полупроводниковых термопреобразователей (термисторов);
— отличием в широком диапазоне температур реальной функции преобразования указанных термисторов от используемой математической модели R t =А·ехр(В/Т );
— погрешностями всех других звеньев, входящих в контур автоматического регулирования перегрева.
Во-вторых, инерционность системы автоматического регулирования перегрева ограничивает быстродействие измерительного устройства.
Сущность предлагаемого способа измерения скорости потока состоит в следующем.
Задается диапазон допустимых перегревов [ min , max ]. При использовании полупроводниковых термопреобразователей (термисторов) этот диапазон может составлять единицы или первые десятки градусов Цельсия. При фиксированной мощности нагрева Р измеряются температуры термоанемометра Т т и среды Т c , определяется перегрев . Полученное значение сравнивается с границами диапазона [ min , max ]. Если min max , то мощность нагрева Р не изменяется (Р=const ). Изменение скорости потока вызывает соответствующее изменение перегрева. Если перегрев выходит из заданного диапазона ( min или > max ), то изменяется мощность нагрева до тех пор, пока перегрев не окажется примерно в середине заданного диапазона [ min , max ]. После этого производятся измерения перегрева при новом фиксированном значении мощности нагрева. Значение измеряемой скорости потока вычисляется по формуле
где V — измеряемая скорость потока;
Р — мощность нагрева;
=Т т -Т с — перегрев;
k, с, d — постоянные коэффициенты.
Формула (3) для вычисления скорости потока получена из уравнений (1) и (2).
Таким образом, в предлагаемом способе измерения скорости потока используются два режима работы измерительного устройства:
режим регулирования мощности нагрева;
В режиме регулирования мощности нагрева измерения температур термоанемометра и среды и оценка перегрева могут выполняться с невысокой точностью, т.к. нет необходимости в точном задании и определении перегрева. Достаточно добиться того, чтобы перегрев оказался в заданном диапазоне [ min , max ]. При этом могут использоваться простые математические модели измерительных преобразователей и простые способы регулирования.
В режиме измерений мощность нагрева фиксирована, с высокой точностью измеряются перегрев и мощность нагрева, а затем вычисляется скорость потока по формуле (3). При этом используются более сложные и более точные математические модели измерительных преобразователей (например, термисторов). Поскольку в режиме измерений отсутствует регулирование мощности нагрева (Р=const), то при этом обеспечивается высокое быстродействие измерительного устройства. Если измеряемая скорость потока изменяется относительно медленно, то регулирование мощности выполняется довольно редко.
Таким образом, разделение процедур измерения скорости потока и регулирования мощности нагрева позволяет получить небольшой диапазон перегревов [ min , max ] при большом диапазоне допустимых изменений скорости потока и большом диапазоне температур среды. За счет этого достигается высокая точность измерений скорости потока в широком диапазоне скоростей и температур, а также обеспечивается высокое быстродействие.
Предлагаемый способ был реализован в устройстве для измерения скорости жидкости (воды). В качестве измерительного преобразователя температуры среды применен миниатюрный термистор с отрицательным температурным коэффициентом. Термоанемометр содержал аналогичный термистор и подогреватель, помещенные в один корпус. Сопротивления обоих термисторов преобразовывались в цифровой код с помощью Сигма-Дельта АЦП. Управление мощностью осуществлялось с использованием цифроаналогового преобразователя. Управление работой АЦП, ЦАП и необходимые вычисления выполнялись с помощью микропроцессора.
В режиме регулирования мощности для грубой оценки перегрева применялась простая математическая модель функции преобразования термисторов:
где R t — сопротивление термистора;
Т — абсолютная температура;
А и В — постоянные коэффициенты.
При этом характеристики термисторов в термоанемометре и преобразователе температуры среды считались идентичными. Эти допущения существенно упрощают процедуру оценки перегрева.
Вычисленная грубая оценка перегрева использовалась для регулирования мощности нагрева термоанемометра, причем было применено ступенчатое шаговое регулирование. При таком способе регулирования процесс регулирования мощности нагрева может иметь итерационный характер. Однако, как показали экспериментальные исследования, при заданном диапазоне перегревов (10±3)°С регулирование мощности нагрева до попадания перегрева в заданный диапазон практически осуществляется за один шаг.
В режиме измерения скорости потока для термисторов использовались более сложные математические модели:
1/T=A+B·lnR t +C·(lnR t ) 2 +D·(lnR t ) 3 , (5)
где R t — сопротивление термистора;
Т — абсолютная температура;
А, В, С, D — постоянные коэффициенты.
При этом коэффициенты А, В, С, D для каждого термистора определялись индивидуально, что позволило измерять температуру в диапазоне (0-100)°С с погрешностью (0,01-0,02)°С при разрешающей способности 0,001°С. В диапазоне скоростей потока V max /V min =100 погрешность измерения скорости не превышала 1% во всем указанном диапазоне температур. При этом одновременно с высокой точностью измерялась температура среды, что необходимо во многих случаях практики.
Предлагаемый способ измерения скорости потока жидкости или газа может быть применен как для измерения местной скорости потока, так и для измерения расхода.
1. Кремлевский П.П.Расходомеры и счетчики количества: Справочник. — 4-е изд., перераб. и доп. — Л.: Машиностроение, Ленингр. отд-ие, 1989. — 701 с.
2. Левшина Е.С., Новицкий П.В. Электрические измерения физических величин: (Измерительные преобразователи). Учеб. пособие для вузов. — Л.: Энергоатомиздат, Ленингр. отд-ие, 1983. — 320 с.
Ультразвуковой способ измерения угловой скорости Российский патент 2020 года по МПК G01P3/44
Описание патента на изобретение RU2714530C1
Изобретение относится к области приборостроения, а именно к приборам ориентации, навигации и системам управления подвижными объектами и предназначено для измерения угловой скорости.
Известны способы измерения угловой скорости с помощью объемных акустических волн [патент №2392625 «Способ измерения угловой скорости», опубл. 20.06.2010] и способ [патент №2520949 «Способ измерения угловой скорости и чувствительный элемент гироскопа на его основе», опубл. 27.06.2014].
Способ [патент №2520949 «Способ измерения угловой скорости и чувствительный элемент гироскопа на его основе», опубл. 27.06.2014] отличается тем, что сигналом на входе является волна круговой поляризации, а сигналом на выходе является сдвиговая компонента каждой из волн круговой поляризации. Измерение угловой скорости основано на оценке разности фаз, возникающей из-за различия времен распространения двух объемных акустических волн круговой поляризации. Разность фаз оценивается по принимаемым фазам сдвиговых компонент волн круговой поляризации.
Чувствительный элемент содержит два идентичных твердотельных звукопровода, между которыми размещают пластинчатый пьезоэлектрический излучающий преобразователь волн круговой поляризации. На свободных торцах размещают пластинчатый приемный преобразователь линейно поляризованных сдвиговых волн. Излучающий пьезопреобразователь возбуждает в каждом звукопроводе волну круговой поляризации. Таким образом, две объемные акустические волны круговой поляризации распространяются в звукопроводах вдоль оси, вокруг которой происходит вращение, но в противоположных направлениях. Каждый приемный преобразователь принимает сдвиговую компоненту волны круговой поляризации. Разность фаз между принятыми компонентами пропорциональна скорость вращения.
Однако стоит отметить, что недостатком указанного способа является сложность конструкции преобразователя, а также необходимость наличия двух идентичных звукопроводов.
Способ измерения угловой скорости с помощью объемных акустических волн, [патент №2392625 «Способ измерения угловой скорости», опубл. 20.06.2010], который наиболее близок по реализации к предлагаемому, отличается тем, что сигналом на входе является линейно поляризованная сдвиговая волна, сигналом на выходе является также линейно поляризованная сдвиговая волна, но с вектором поляризации, повернутым на 90° относительно излученной.
Чувствительный элемент содержит твердотельный звукопровод, выполненный из материала, обладающего минимальной скоростью распространения сдвиговых волн, поскольку уровень информативного сигнала обратно пропорционален скорости распространения сдвиговых волн. На плоскопараллельных торцах звукопровода размещают пластинчатые пьезоэлектрические излучающие и приемные преобразователи. Излучающий пьезопреобразователь возбуждает в звукопроводе линейно поляризованную сдвиговую волну. Приемный преобразователь линейно поляризованной сдвиговой волны имеет угол поляризации близким к 90° относительно излучаемой сдвиговой волны. Таким образом, приемный преобразователь принимает ортогональные компоненты сдвиговой поляризации, возникающие в излученной волне по мере распространения в звукопроводе в условиях вращения. Достоинством способа является устойчивость к механическим нагрузкам.
Недостатками способа являются необходимость размещения преобразователей на звукопроводе и необходимость точной юстировки осей поляризации излучающего и приемного пьезопреобразователей.
Задачей настоящего изобретения является разработка способа измерения угловой скорости, отличающегося простой реализацией.
Поставленная задача решается за счет того, что в предлагаемом способе измерения угловой скорости, так же, как и в известном излучают линейно поляризованную волну, но в отличие от известного, в предлагаемом способе принимают вид линейно поляризованной волны, не совпадающий с излученной.
Техническим результатом является упрощение способа измерения угловой скорости.
Технический результат достигается за счет того, что преобразователи размещают на объекте измерения, чья угловая скорость которого надлежит измерению, и за счет того, что не требуется юстировка осей поляризации преобразователей.
Пьезопреобразователь излучает объемную линейно поляризованную волну, которая распространяется перпендикулярно оси вращения среды распространения. В условиях вращения излученная линейно поляризованная волна, например, сдвиговая, представляет собой две волны эллиптической поляризации. Частицы в этих волнах колеблются вдоль двух осей, ортогональных оси вращения, а волны распространяются с разными скоростями. Таким образом, в условиях вращения, приемный пьезопреобразователь принимает продольную компоненту вектора поляризации.
Сущность способа измерения угловой скорости вращения объекта поясняется чертежами, где:
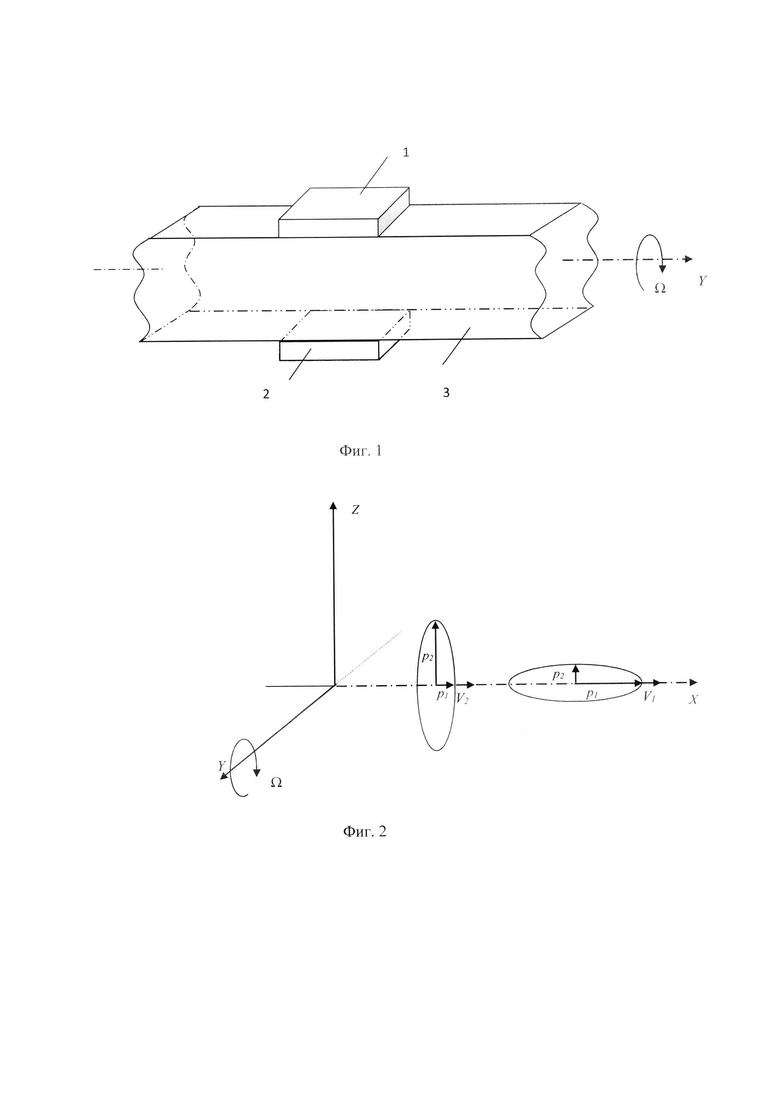
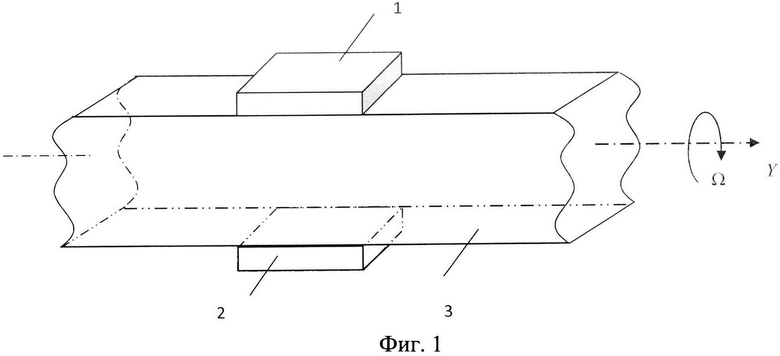
на фиг. 1 представлено графическое пояснение схемы реализации способа измерение
на фиг. 2 схематически изображены траектории движения частиц в распространяющихся волнах.
Рассмотрим более подробно последовательность действий предлагаемого способа. На фиг. 1 показаны излучающий пластинчатый пьезопреобразователь 1, и приемный пластинчатый пьезопреобразователь 2, которые размещают на измерительном объекте 3, вращающийся вокруг оси Y. Пьезопреобразователь 1 излучает линейно поляризованную волну, например, сдвиговую, которая в условиях вращения объекта вокруг оси Y, представляет собой совокупность двух волн эллиптической поляризации. Пьезопреобразователь продольной поляризации 2 при наличии вращения принимает продольную компоненту волн эллиптической поляризации, которая пропорциональна скорости вращения объекта 3. При отсутствии вращения принимаемый сигнал на приемном пьезопреобразователе 2 отсутствует.
Для проведения измерения угловой скорости вращения преобразователи размещают на конструктивных частях объекта. В качестве элементов конструкции могут использоваться ребра жесткости из изотропных материалов, например, металлов, имеющих доступные для размещения преобразователей плоскопараллельные торцы. Таким образом, для определения угловой скорости указанным способом не требуется размещения дополнительного звукопровода.
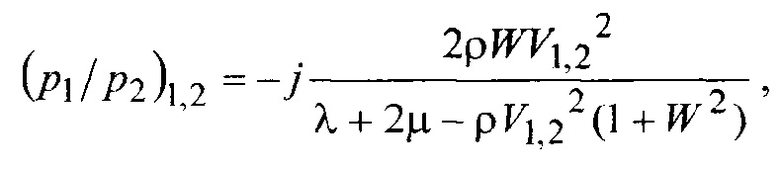
Фиг. 2 демонстрирует траектории движения частиц в волнах, распространяющихся вдоль оси X, в случае вращения измерительного объекта вокруг оси Y. Излученная при таких условиях линейно поляризованная сдвиговая волна с вектором смещения вдоль оси Z раскладывается на две волны эллиптической поляризации, которые распространяются с различными скоростями квазипродольной волны V1 и квазипоперечной волны V2.
где ρ — плотность материала объекта; λ и μ — постоянные Ламе, W=Ω/2πƒ относительная частота вращения объекта, Ω — скорость вращения объекта, ƒ — линейная частота ультразвуковых колебаний.
В этих волнах смещения частиц происходят не только вдоль оси Z (сдвиговая компонента), но и вдоль оси X (продольная компонента). Таким образом, излученная линейно поляризованная волна является совокупностью двух волн эллиптической поляризации, смещения в которых происходят вдоль оси Z и вдоль оси X. Отношения осей эллипсов поляризации двух этих волн (p1/p2)1 и (p1/р2)2 пропорциональны Ω:
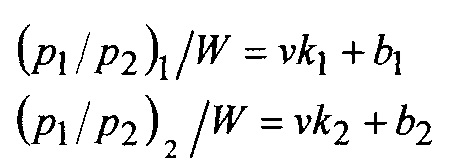
Отношение длин осей эллипса также однозначно зависит при заданной частоте вращения от коэффициента Пуассона v:
Величины k1=k2=-4.023 и b1=4.002, b2=2.002 позволяют определить характер движения частиц среды в зависимости от скорости вращения для любого материала по известному коэффициенту Пуассона v.
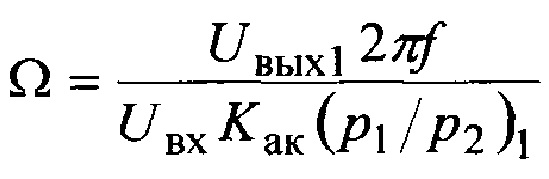
Определим амплитуду выходного напряжения Uвых1 на приемном пьезопреобразователе, которая пропорциональна скорости вращения, для излучения сдвиговой волны, а приема продольной, по формуле:
где: Uвx — напряжение, подаваемое на излучающий преобразователь; Как — коэффициент передачи акустического тракта датчика.
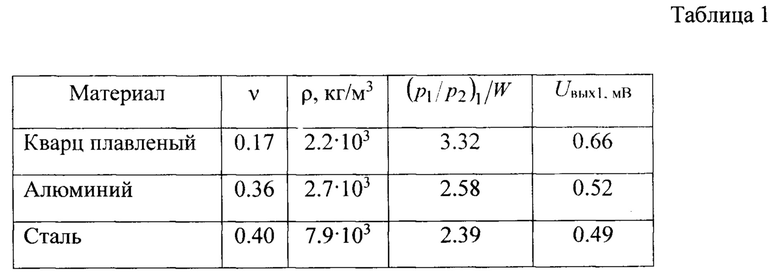
В таблице 1 представлены отношения осей эллипсов поляризации, приведенные к W, а также амплитуды выходного напряжения Uвых1 для различных материалов объекта, для излучения сдвиговой волны, а приема продольной, при Uвх=100 В, Ω=1 об/с, ƒ=0,5 МГц, Как=0 дБ.
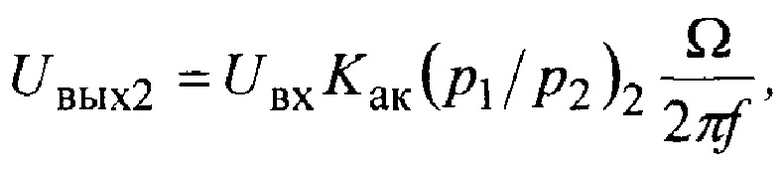
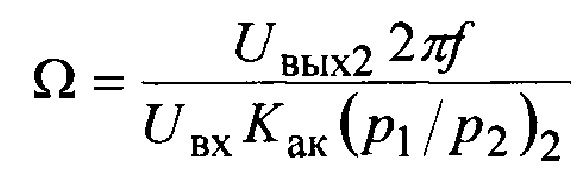
Определим амплитуду выходного напряжения Uвых2 на приемном пьезопреобразователе, которая пропорциональна скорости вращения, для излучения продольной волны, а приема сдвиговой по формуле:
где: Uвх — напряжение, подаваемое на излучающий преобразователь; Как — коэффициент передачи акустического тракта датчика.
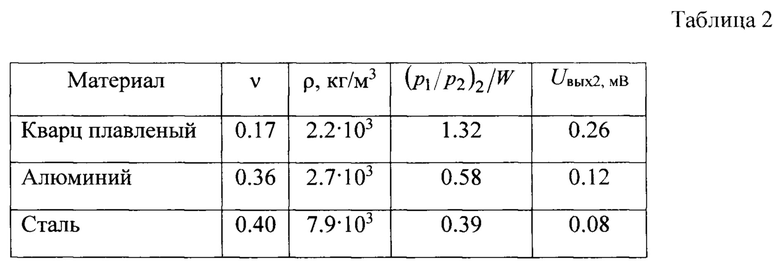
В таблице 2 представлены отношения осей эллипсов поляризации, приведенные к W, а также амплитуды выходного напряжения Uвых2 для излучения продольной волны, а приема сдвиговой, для различных материалов объекта, при Uвх=100 В, Ω=1 об/с, ƒ ƒ=0,5 МГц, Как=0 дБ.
Как видно из таблиц 1 и 2, амплитуда выходного сигнала, при излучении сдвиговой волны, а приеме продольной, больше, чем при излучении продольной, а приеме сдвиговой.
Таким образом, угловая скорость при излучении сдвиговой волны, а приеме продольной определяется следующим соотношением:
Угловая скорость при излучении продольной волны, а приеме сдвиговой определяется аналогичным соотношением:
Техническим результатом является упрощение способа измерения угловой скорости.
Технический результат достигается за счет того, что преобразователи размещают на объекте измерения, чья угловая скорость надлежит измерению, и за счет того, что не требуется юстировка осей поляризации преобразователей.
Была экспериментально подтверждена возможность использования такого способа для измерения скорости вращения на конструкции, в которой излучают объемную акустическую линейно поляризованную сдвиговую волну, а принимают линейно поляризованную продольную волну, которая появляется при вращении перпендикулярно направлению распространения. Для изготовления макета использовались пластинчатые пьезопреобразователи из пьезокерамики ЦТС-19 и измеряемый объект, выполненный из плавленого кварца, в виде цилиндра. Были получены качественные результаты зависимости информативного параметра от скорости вращения, подтверждающие их линейную связь, как для излучения линейно поляризованной сдвиговой волны, а приема продольной, так и для излучения линейно поляризованной продольной волны, а приема сдвиговой волны.
Описание изобретения свидетельствует о том, что предложен новый способ измерения угловой скорости, основанный на особенностях распространения объемных акустических волн, когда ось вращения объекта ортогональна направлению распространения волны. Достигнут технический результат — упрощение способа измерения угловой скорости.
Похожие патенты RU2714530C1
название
год
авторы
номер документа
СПОСОБ ИЗМЕРЕНИЯ УГЛОВОЙ СКОРОСТИ И ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ ГИРОСКОПА НА ЕГО ОСНОВЕ
Способ модуляции лазерного излучения и устройство для его осуществления
2019
Молчанов Владимир Яковлевич
Юшков Константин Борисович
Науменко Наталья Федоровна
Чижиков Александр Ильич
Гуров Василий Викторович
Захаров Никита Геннадьевич
Павлюк Анатолий Алексеевич
RU2699947C1
ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ ГИРОСКОПА
2009
Грибкова Екатерина Сергеевна
Лукьянов Дмитрий Павлович
Перегудов Александр Николаевич
Шевелько Михаил Михайлович
RU2397445C1
УЛЬТРАЗВУКОВОЙ ДАТЧИК СДВИГОВЫХ ВОЛН
2007
Хлыбов Александр Анатольевич
Углов Александр Леонидович
Прилуцкий Максим Андреевич
RU2365911C2
Способ ультразвукового контроля изделий со сферической и цилиндрической поверхностью
1982
Ушаков Валентин Михайлович
Щербинский Виктор Григорьевич
Алексеев Валерий Михайлович
SU1067432A1
Иллюстрации к изобретению RU 2 714 530 C1
Реферат патента 2020 года Ультразвуковой способ измерения угловой скорости
Использование: для измерения угловой скорости. Сущность изобретения заключается в том, что осуществляют возбуждение и прием объемной акустической волны, прошедшей через измеряемый объект, выполненный из изотропного материала, при этом преобразователи размещают на измеряемом объекте и излучают линейно поляризованную волну, а принимают вид линейно поляризованной волны, не совпадающий с излученной, и по амплитуде принятой волны определяют угловую скорость вращения объекта. Технический результат: упрощение измерения угловой скорости. 2 ил.
Формула изобретения RU 2 714 530 C1
Ультразвуковой способ измерения угловой скорости путем возбуждения и приема объемной акустической волны, прошедшей через измеряемый объект, выполненный из изотропного материала, отличающийся тем, что преобразователи размещают на измеряемом объекте и излучают линейно поляризованную волну, а принимают вид линейно поляризованной волны, не совпадающий с излученной, и по амплитуде принятой волны определяют угловую скорость вращения объекта.

 -с) d , где V — скорость потока, Р — мощность нагрева,
-с) d , где V — скорость потока, Р — мощность нагрева,