
Система сходящихся сил




![]()
![]()
Лекция 2
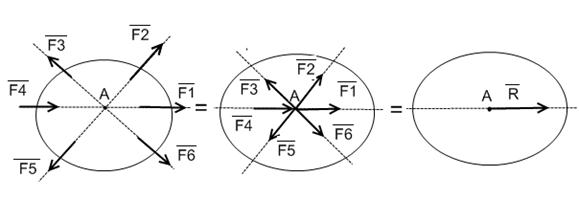
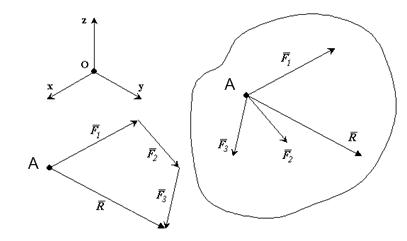
Системой сходящихся сил (ССС) называется такая система сил, линии действия которых пересекаются в одной точке.
ССС эквивалентна равнодействующей силе, которая равна векторной сумме слагаемых сил. Точка приложения равнодействующей силы совпадает с точкой пересечения линий действия сил.
Решение многих задач механики связано с операциями сложения сил.
Определение. Вектор, равный геометрической сумме системы сил, называется главным вектором системы сил.
Не путать с понятием равнодействующей!
Главный вектор определяется всегда для любой системы сил. Но существуют системы сил, которые нельзя заменить равнодействующей – пара сил, скрещивающиеся силы.
Операции сложения сил и разложение сил на составляющие
1. Сложение двух сил:  .
.
Выполняется по правилу параллелограмма или путем построения силового треугольника.
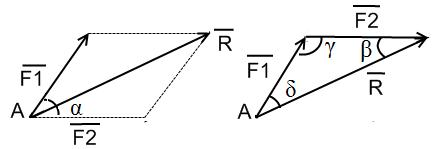
Модуль силы  находится с помощью теоремы косинусов или теоремы синусов:
находится с помощью теоремы косинусов или теоремы синусов:
R =  ,
,
 .
.
2.Сложение трех сил, не лежащих в одной плоскости:  .
.
Операция сводится к нахождению диагонали параллелепипеда, построенного на этих силах. В простейшем случае параллелепипед прямоугольный (рис.1-9)
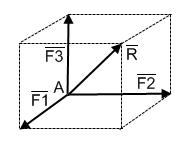 | Модуль вектора находим по формуле:  . . |
3.Сложение системы сходящихся сил:  .
.
Операция сложения выполняется либо последовательным применением к системе сил правила параллелограмма, либо путем построения силового многоугольника (рис.1-9).
4.Разложение силы на составляющие.
Операция, обратная сложению сил. Может быть выполнена неоднозначно. Необходимо задать направления составляющих сил. Наиболее часто встречаются два случая:
1) Разложение силы на две составляющие:  .
.
Операция сводится к нахождению сторон параллелограмма, у которого известна диагональ R и углы, образованные с диагональю линиями действия составляющих сил. Ниже показаны три варианта разложения силы на составляющие:  . Модули составляющих сил находятся по теореме синусов при известных значениях углов.
. Модули составляющих сил находятся по теореме синусов при известных значениях углов.

2) Разложение силы на три составляющие, не лежащие в одной плоскости:
 .
.
Операция сводится к нахождению сторон параллелепипеда, у которого известной является диагональ.
Аналитический способ нахождения равнодействующей ССС
Аналитические методы решения задач механики основаны на методах проекций.
Аналитический способ задания силы.
В декартовых координатах приложенный в заданной точке А вектор  можно задать двумя способами.
можно задать двумя способами.
| 1) — задать координаты точки А (x,y,z), — задать модуль вектора F, — задать углы α, β, γ, образованные вектором с осями координат. | 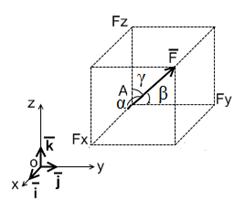 |
2) — задать координаты точки А (x,y,z),
— определить проекции вектора на оси координат: Fx, Fy, Fz.
— определить модуль вектора и направляющие косинусы:
F =  ,
,  .
.
Аналитический способ нахождения равнодействующей
Используется теорема геометрии: Проекция вектора суммы на какую-либо ось равна алгебраической сумме проекций слагаемых сил на ту же ось.
 | Равнодействующая ССС находится по правилу параллелограмма:  (*) Находим силу (*) Находим силу  в декартовых координатах вторым способом: в декартовых координатах вторым способом:  Находим проекции вектора, спроецировав векторное равенство на оси координат: Находим проекции вектора, спроецировав векторное равенство на оси координат:  . . |
Модуль равнодействующей и направляющие косинусы:
R = ,
,  .
.
Главный вектор и равнодействующая ССС
Главный вектор и равнодействующая ССС находятся по правилу параллелограмма: , следовательно, эти два определения для ССС совпадают.
Необходимые и достаточные условия равновесия ССС
Формулируются в геометрической и аналитической форме.
1. Геометрическая форма. Для того, чтобы ССС находилась в равновесии необходимо и достаточно, чтобы главный вектор (равнодействующая) равнялся нулю
= 0.
R == 0, если выполняются три условия:
1)  , 2)
, 2)  3)
3)
Для того, чтобы ССС находилась в равновесии необходимо и достаточно, чтобы алгебраические суммы проекций всех сил на каждую их трех координатных осей равнялись нулю.
Каждое из условий соответственно означает, что тело под действием ССС не совершает линейные перемещения вдоль координатных осей x,y,z.
Источник
Аналитический способ сложения сходящейся системы сил
Для аналитического задания силы необходимо выбрать систему координационных осей, по отношению к которым будет определяться направление силы в пространстве.
Вектор, изображающий силу, можно построить, если известны её проекции на прямоугольные декартовы оси координат.
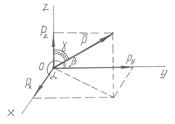

Сила  разложена на составляющие
разложена на составляющие  , которые численно равны проекциям силы на соответствующие оси. Отсюда следует, что если известны проекции силы на оси координат, то можно вектор силы построить геометрически.
, которые численно равны проекциям силы на соответствующие оси. Отсюда следует, что если известны проекции силы на оси координат, то можно вектор силы построить геометрически.

 ,
,
где 
Чтобы сложить силы аналитически, необходимо вычислить проекции сил на координатные оси.
Аналитическое условие равновесия сходящейся системы сил.
 , т.е. и
, т.е. и  , тогда
, тогда
-аналитическое выражение равновесия пространственной сходящейся системы сил.
 — для плоской системы сил
— для плоской системы сил
Для равновесия сходящейся системы сил необходимо и достаточно, чтобы суммы проекций всех сил на три взаимноперпендикулярных оси были равны 0.
Лекция 3.
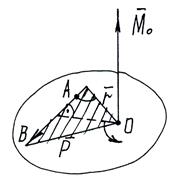 Момент силы относительно точки.
Момент силы относительно точки.
Дано: тело с неподвижной т.О, в т.А приложена сила , которая стремится повернуть тело вокруг т.О. Такое действие силы называется вращательным эффектом. Вращательный эффект изменяется моментом силы относительно точки:  .
.
Момент силы относительно т.О изображается вектором  приложенным в этой точке и направленным перпендикулярно к плоскости, содержащей силу и точку, в такую сторону, чтобы, смотря навстречу этому вектору, видеть силу , стремящуюся вращать эту плоскость в сторону, обратную вращению часовой стрелки.
приложенным в этой точке и направленным перпендикулярно к плоскости, содержащей силу и точку, в такую сторону, чтобы, смотря навстречу этому вектору, видеть силу , стремящуюся вращать эту плоскость в сторону, обратную вращению часовой стрелки.
Модуль этого вектора:  ,
,
где d – плечо — кратчайшее расстояние от т.О до линии действия силы.
Модуль можно выразить 
Момент силы равен, нулю если d=0
Если в т.А провести  , то
, то 
 , но
, но 
Вектор момента силы относительно т.О можно рассматривать как векторное произведение , проведенного из этой точки в точку приложения силы на вектор силы .
Дата добавления: 2017-02-04 ; просмотров: 471 ; ЗАКАЗАТЬ НАПИСАНИЕ РАБОТЫ
Источник
Аналитический способ сложения сил
Теорема: проекция вектора суммы на какую-нибудь ось равна алгебраической сумме проекций слагаемых векторов на ту же ось.
Е



 слиR = F1 + F2 + F3 + … + Fn, причем (F1x, F1y, F1z), (F2x, F2y, F2z), …, (F3x, F3y, F3z) – наборы проекций этих векторов на оси X, Y и Z то
слиR = F1 + F2 + F3 + … + Fn, причем (F1x, F1y, F1z), (F2x, F2y, F2z), …, (F3x, F3y, F3z) – наборы проекций этих векторов на оси X, Y и Z то
Модуль результирующей силы:
 .
.
Н аправление результирующего вектораR определяется направляющими косинусами:
аправление результирующего вектораR определяется направляющими косинусами:
 ;
;  ;
;  .
.
П

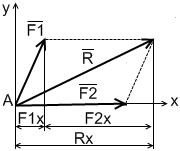
 ример 1. Определить результирующую силу трех силF1, F2, F3 проекции которых заданы: F1(3;3), F2(6;-2), F3(-5;-3). Силы заданы в Ньютонах (рис. 2.4).
ример 1. Определить результирующую силу трех силF1, F2, F3 проекции которых заданы: F1(3;3), F2(6;-2), F3(-5;-3). Силы заданы в Ньютонах (рис. 2.4).
Р ешение:
ешение:
Rx = 3 + 6 – 5 = 4H; Ry = 3 – 2 – 3 = -2H;

одуль результирующей силы:


Ответ: R = 4,5H; = 63 o ; = 27 o .
Пример 2. Задана плоская система сил, действующая на точку А. F1 = 15Н; F2 = 10Н. Определить равнодействующую силу (рис. 2.5).
Р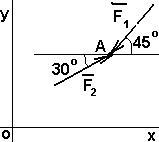 ешение:
ешение:
Определим сумму проекций данных сил на оси OX и OY:
Ось OX: 
сьOY: 
Подставляя численные значения получим:
Модуль равнодействующей:
Направляющие косинусы:  ;
;  .
.
Ответ: R = 19,9H; = 74 o ; = 16 o .
Равновесие системы сходящихся сил
Система сходящихся сил – это силы, сходящиеся в одной точке (рис. 2.6).
Геометрическое условие равновесия. Для равновесия системы сходящихся сил необходимо и достаточно, чтобы силовой многоугольник, построенный на этих силах, был замкнут.
А 
налитические условия равновесия. Для равновесия пространственной системы сходящихся сил необходимо и достаточно, чтобы суммы проекций этих сил на каждую из трех координатных осей были равны нулю.
Теорема о трех силах. Если свободное твердое тело находится в состоянии равновесия под действием трех непараллельных сил, лежащих в одной плоскости, то линии действия этих сил пересекаются в одной точке.
F

 1 + F2 + F3 = 0
1 + F2 + F3 = 0
Системы статически определимые и статически неопределимые
Задача статики может быть решена лишь в том случае, когда для нее число неизвестных реакций связей не превышает число уравнений равновесия, содержащих эти реакции. Такие задачи называют статически определенные, а система тел, для которых это имеет место – статически определимыми системами.
Задачи, в которых число неизвестных реакций связей больше числа уравнений равновесия, содержащих эти реакции, называются статически неопределенные, а система тел для которых это имеет место – статически неопределимыми системами.
П 
римером для статически неопределенной системы может служить груз, подвешенный на трех нитях, лежащих в одной плоскости (рис. 2.7). В этой задаче три неизвестные силы натяжения нитиT1, T2, T3, а уравнений равновесия в случае плоской системы сходящихся сил можно составить только два.
Решение задач статики
Для решения задач статики необходимо:
Выбрать тело, равновесие которого должно быть рассмотрено.
Освобождение тела от связей и изображение действующих на него заданных сил и реакций отброшенных связей.
Составление уравнений равновесия.
Определение искомых величин, проверка правильности решения и исследование полученных результатов.
Для решения задач на равновесие тела под действием сходящихся сил можно использовать следующие способы:
а ) Геометрический способ. Применяется если число сил, действующих на тело равно трем. При равновесии треугольник, построенный на этих силах, должен быть замкнутым.
) Геометрический способ. Применяется если число сил, действующих на тело равно трем. При равновесии треугольник, построенный на этих силах, должен быть замкнутым.
б) Аналитический способ. Применяется при любом количестве сил, действующих на тело. В случае плоской системы сходящихся сил составляется два уравнения равновесия, а в случае пространственной системы сил – три.
П

 ример №3. К вертикальной гладкой стене АВ подвешен на тросе АС однородный шар. Трос составляет со стеной угол, сила тяжести шара Р. Определить силу натяжения троса Т и давление шара на стену Q. Шар находится в равновесии под действием этих трех сил (рис. 2.8а).
ример №3. К вертикальной гладкой стене АВ подвешен на тросе АС однородный шар. Трос составляет со стеной угол, сила тяжести шара Р. Определить силу натяжения троса Т и давление шара на стену Q. Шар находится в равновесии под действием этих трех сил (рис. 2.8а).
Р
 ассмотрим решение задачи геометрическим (графическим) способом. Так как шар находится в равновесии под действием трех сил, то эти силы сходящиеся. Точка, в которой сходятся эти силы, является геометрическим центром шара (точка О). Построим силовой треугольник (рис. 2.8б). Построение начинают с известной силы Р.
ассмотрим решение задачи геометрическим (графическим) способом. Так как шар находится в равновесии под действием трех сил, то эти силы сходящиеся. Точка, в которой сходятся эти силы, является геометрическим центром шара (точка О). Построим силовой треугольник (рис. 2.8б). Построение начинают с известной силы Р.
Силовой треугольник должен быть замкнут. В данном случае это прямоугольный треугольник. Тогда:  ;
; 
твет: ;
; 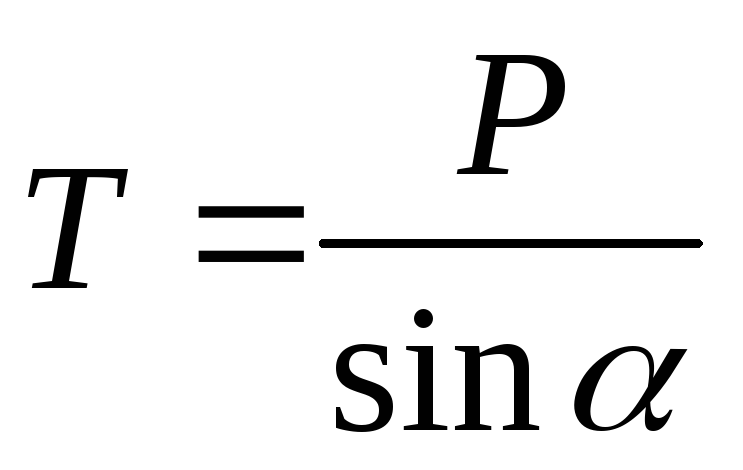 .
.
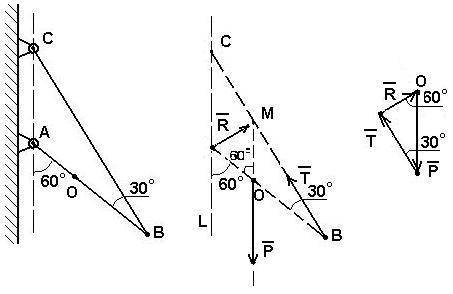
ример №4. Однородный стержень АВ прикреплен к стенке посредством шарнира А и удерживается под углом 60 0 к вертикали при помощи троса ВС, образующего с ним угол 30 0 (рис. 2.9а). Определить величину и направление реакции R шарнира, если известно, что вес стержня равен 20Н.
Определим силы, действующие на данную конструкцию:
Р – сила тяжести стержня АВ, так как стержень однородный, то сила приложена к его геометрическому центру (точка О).
Т – натяжение троса СВ, направлено вдоль СВ.
R – реакция в шарнире А (направление неизвестно) (рис. 2.9б).
Согласно принципу освобождаемости от связей, заменим связи соответствующими реакциями.
Так как система находится в равновесии под действием трех сил, то эти силы должны сходиться, а поэтому сила реакции R направлена от А к М (точка пересечения сил Р и Т).
Построим силовой треугольник. Для этого выберем произвольную точку О и отложим от нее известную силу Р, сохраняя ее направление. Из конца вектора Р под углом 30 0 проведем луч, который соответствует направлению силы Т (рис. 2.9в).
Так как — 60 0 = 120 0 , тогда 0 – (120 0 + 30 0 ) = 30 0 , т.е. треугольник ОМВ равнобедренный: сторона ОМ = ОВ. Поэтому ОМ = ОВ = ОА, так как О является серединой АВ, а угол 0 , то треугольник АОМ является равносторонним. Поэтому 0 = 0 к направлению силы Р до пересечения с направлением силы Т. Полученный треугольник прямоугольный, поэтому R = Psin30 0 = 20/2 = 10H.
Пример №5. Три груза А, В и С массой 10, 20, и 60 кг соответственно лежат на плоскости, наклоненной под углом к горизонту (рис. 2.10). Грузы соединены тросами, как показано на рисунке. Коэффициенты трения между грузами и плоскостью равны А = 0,1, В = 0,25, С = 0,5 соответственно.
Определить угол , при котором тела равномерно движутся вниз по плоскости. Найти также натяжение тросов ТАВ и ТВС.
Р ешение:
ешение:
ассмотрим, какие силы действуют на каждое тело и запишем условие равновесия, так как тела движутся равномерно, то
с






 умма всех сил, действующих на тело равна нулю. На тело А действует сила тяжести РА, сила реакции опоры NА, сила трения FтрА и сила натяжения троса ТАВ (рис. 2.10б). Условие равновесия: РА + NА + FтрА + ТАВ = 0.
умма всех сил, действующих на тело равна нулю. На тело А действует сила тяжести РА, сила реакции опоры NА, сила трения FтрА и сила натяжения троса ТАВ (рис. 2.10б). Условие равновесия: РА + NА + FтрА + ТАВ = 0.
Выберем систему координат и спроектируем силы на оси:
Подставляя численные значения получим: 10sin — cos — ТАВ = 0.
Р








 ассмотрим, какие силы действуют на тело В: РВ — сила тяжести, FтрВ — сила трения, ТВА— сила натяжения троса со стороны груза А, ТВС — сила натяжения троса со стороны груза С, NВ — сила реакции опоры (рис. 2.10в). Тогда условие равновесия будет: РВ + NВ + FтрВ + ТВА + ТВС = 0.
ассмотрим, какие силы действуют на тело В: РВ — сила тяжести, FтрВ — сила трения, ТВА— сила натяжения троса со стороны груза А, ТВС — сила натяжения троса со стороны груза С, NВ — сила реакции опоры (рис. 2.10в). Тогда условие равновесия будет: РВ + NВ + FтрВ + ТВА + ТВС = 0.
Проектируя это уравнение на ось ОХ, получим:
Н


 а тело С действуют следующие силы: РС — сила тяжести, FтрС — сила трения, ТСВ— сила натяжения троса со стороны груза В, NС — сила реакции опоры (рис. 2.10г). Тогда условие равновесия при проектировании на ось ОХ будет:
а тело С действуют следующие силы: РС — сила тяжести, FтрС — сила трения, ТСВ— сила натяжения троса со стороны груза В, NС — сила реакции опоры (рис. 2.10г). Тогда условие равновесия при проектировании на ось ОХ будет:
60sin — 60*0,5cos – ТВС = 0.
Получим систему из трех уравнений с тремя неизвестными:
Так как неизвестные силы перпендикулярны оси y, то на эту ось силы не проектируем.
1 0sin — cos — ТАВ = 0 (1);
0sin — cos — ТАВ = 0 (1);
60sin — 30cos – ТВС = 0 (3).
Отсюда: ТАВ = 10sin — cos; ТВС = 60sin — 30cos.
Подставляя выражения ТАВ и ТВС в уравнение (2), получим:
100sin = 38.5cos; tg = 0.385; = arctg0.385; = 21 0 .
Из уравнения (1) получим: ТАВ = 10sin21 0 — cos21 0 = 10*0,358 – 0,93 = 2,67Н.
Подставляя численные данные в уравнение (3), получим:
ТВС = 60sin21 0 — 30cos21 0 = 60*0,358 – 30*0,93 = 6,42Н;
Ответ: = 21 0 ; ТАВ = 2,67Н; ТВС = 6,42Н.
Источник



