
iSopromat.ru

Рассмотрим три существующих способа задания движения материальной точки: координатный, векторный и естественный.
Чтобы иметь возможность определить параметры движения точки необходимо задать закон ее движения.
В зависимости от известных величин и поставленной задачи могут быть использованы следующие способы задания движения точки: векторный, координатный и естественный.
Векторный
При векторном способе задания движения положение точки определяется радиус-вектором, проведенным из неподвижной точки в выбранной системе отсчета.

Координатный
При координатном способе задания движения задаются координаты точки как функции времени:
Это параметрические уравнения траектории движущейся точки, в которых роль параметра играет время t. Чтобы записать ее уравнение в явной форме, надо исключить из них t.
Естественный
При естественном способе задания движения задаются траектория точки, начало отсчета на траектории с указанием положительного направления отсчета, закон изменения дуговой координаты: s=s(t). Этим способом удобно пользоваться, если траектория точки заранее известна.
Уважаемые студенты!
На нашем сайте можно получить помощь по техническим и другим предметам:
✔ Решение задач и контрольных
✔ Выполнение учебных работ
✔ Помощь на экзаменах
Источник
Способы задания движения точки
Для решения задач кинематики необходимо, чтобы изучаемое движение было задано. Оно считается заданным, если в любой момент времени однозначно можно определить положение точки в пространстве относительно заданной системы отсчета. Используют три основных способа задания движения точки: векторный, координатныйи естественный.
Векторный способ. Положение движущейся точки М в любой момент времени можно определить с помощью ее радиус-вектора, проведенного из центра О, связанного с телом отсчета, в точку М (рис. 1.1). Чтобы задать движение векторным способом, необходимо определить векторную функцию времени в виде:
 (1.1)
(1.1)
Зависимость (1.1) называют уравнением движения точки в векторной форме. Начало радиус-вектора движущейся точки находится в точке О, а конец его перемещается по траектории вместе с точкой М. Геометрическое место концов радиус-вектора, т.е. годограф этого вектора, определяет траекторию движущейся точки.
Координатный способ. С телом отсчета связывают прямоугольную систему декартовых координат, при этом положение точки определяют ее координатами, которые являются скалярными функциями времени (рис. 1.2):

 (1.2)
(1.2)
Уравнения (1.2) называют уравнениями движения точки в координатной форме. Они являются параметрическими уравнениями траектории точки. Исключив из этих уравнений параметр – время, можно получить уравнение траектории.
Между способами задания движения точки имеется связь. Так, если начало декартовой системы координат совпадает с центром, из которого проводится радиус-вектор точки при векторном способе изучения ее движения (см. рис. 1.2), то координаты точки равны проекциям на соответствующие оси радиус-вектора точки
 ,
,
где  – единичные орты координатных осей.
– единичные орты координатных осей.
Естественный способ. Этот способ используют в тех случаях, когда заранее известна траектория точки. На траектории выбирают неподвижную точку О (начало отсчета), а также положительное и отрицательное направления отсчета расстояний точки от начала отсчета (рис. 1.3). Тогда положение точки М на траектории будет однозначно определяться зависимостью криволинейной координаты S = ОМ от времени
 (1.3)
(1.3)
 Связь между координатным и естественным способами определяется выражением
Связь между координатным и естественным способами определяется выражением
 ,
,
где  – первые производные от координат точки по времени; С – постоянная интегрирования, зависящая от начальных условий.
– первые производные от координат точки по времени; С – постоянная интегрирования, зависящая от начальных условий.
Источник
Кинематика
Кинематика – раздел механики, в котором изучаются движение материальных тел с геометрической точки зрения, без учета массы и действующих на них сил. Способы задания движения точки: 1) естественный, 2) координатный, 3) векторный. Траектория точки – непрерывная кривая, которую описывает точка при своем движении.
Естественный сп . указывается траектория точки, закон ее движения по этой траектории, начало и направление отсчета дуговой координаты: s=f(t) – закон движения точки. При прямолинейном движении: х= f(t).
Координатный сп . положение точки в пространстве определяется тремя координатами, изменения которых определяют закон движения точки: x=f1(t), y=f2(t), z=f3(t).
Если движение в плоскости, то два уравнения движения. Уравнения движения описывают уравнение траектории в параметрической форме. Исключив из уравнений параметр t , получаем уравнение траектории в обычном виде: f(x,y)=0 (для плоск-ти).
Векторный сп . положение точки определяется ее радиус-вектором , проведенным из какого-либо центра. Кривая, которая вычерчивается концом какого-либо вектора, назыв. годографом этого вектора. Т.е. траектория – годограф радиус-вектора. Связь между координатным и векторным способами: ,
( – орты – единичные вектора, сонаправленные с какой-либо осью)
модуль , направляющие косинусы: и т.д.
Переход от координатного способа к естественному: .
Скорость точки . Вектор ск-сти: – первая производная от радиус-вектора по времени (точка обозначает производную по времени); . Проекции скорости: , , . Модуль скорости:
, направляющие косинусы: и т.д. Если модуль скорости не изменяется с течением времени, то движение называется равномерным. При естественном сп.: – модуль скорости, вектор скорости: , – орт касательной, т.е. скорость всегда направлена по касательной к траектории. Если v>0, то движение происходит в сторону положительного отсчета дуговой координаты и наоборот. Движение в полярной системе координат: r=r(t) – полярный радиус, j = j ( t) – угол. Проекции скорости на радиальное направление , поперечное направление , модуль скорости ; x=rcos j , y=rsin j .
Ускорение точки . , [ м/сек 2 ]. Проекции уск.-я: и т.д. Модуль уск.-я: , направляющ. косинусы: , и т.д.
При задании движения в полярных координатах: проекции ускорения на радиальное направление , поперечное направление , модуль ускорения . При естественным сп. задания движения полное ускорение раскладывают на нормальное и касательное (тангенциальное) ускорения: . Модуль нормального ускорения: , r – радиус кривизны траектории, нормальное ускорение направлено по нормали к траектории ( ^ к касательной) всегда к центру кривизны, т.е. в сторону вогнутости. Нормальное ускорение характеризует изменение скорости по направлению. Модуль касательного ускорения , направлено по касательной к траектории, либо в сторону скорости, либо в обратную. Касательное ускорение характеризует изменение скорости по величине. При ускоренном движ-ии направление касат. уск. и скорости совпадают, при замедленном – противоположно. ^ , Þ . Вектор ускорения лежит в соприкасающейся плоскости Þ его проекция на бинормаль равна 0 (главная нормаль лежит в соприкасающейся плоскости, т.е. в плоскости плоской кривой, бинормаль – ^ к главной нормали и касательной). Частные случаи движения точки : 1) Прямолинейное: радиус кривизны r = ¥ (бесконечно большой) Þ а n =0, a=a t . 2) Равномерное криволинейное движ-ие: v=const Þ a t =0, a=an. Уск. появляется только за счет изменения направления скорости. Закон движ-ия: s=s0+v × t, при s0=0 v=s/t.
3) Равномерное прямолинейное движ-ие: а= a t =an=0. Единственное движ-ие, где а=0.
4) Равнопеременное криволинейное движ-ие: a t =const , v=v0+a t × t, . При равноуск. движении знаки у a t и v одинаковы, при равнозамедленном – разные.
Простейшие движения твердого тела: поступательное и вращение вокруг неподвижной оси. Поступательное движение тела – такое движение твердого тела, при котором любая прямая, проведенная в этом теле, перемещается, оставаясь параллельное самой себе. При поступат. движ. все точки тела описывают одинаковые траектории и имеют в каждый момент времени одинаковые по модулю и направлению скорости и ускорения. Вращательное движение тела – такое движение твердого тела, при котором все точки, принадлежащие некоторой прямой, неизменно связанной с телом, остаются неподвижными. Эта прямая называется осью вращения тела. При этом движении все точки тела движутся в плоскостях, перпендикулярных оси вращения, и описывают окружности, центры которых лежат на оси вращения. Урав-ние (закон) вращательного движ.: j = f(t) – угол поворота тела в радианах. (1 рад= 180 о / p =57,3 о ).
Угловая ск-сть : , [ рад/с ] – определяет быстроту изменения угла поворота.
Вектор угловой скорости тела, совершающего вращение вокруг неподвижной оси, направлен вдоль оси вращения так, что если смотреть ему навстречу вращение будет против час. стрелке. » n»– число оборотов в мин. [об/мин], 1об=2 p рад, . Угловое ускорение тела: , [ рад/с 2 ]. Вектор углового ускорения также направлен вдоль оси вращения. При ускоренном движении совпадает по направлению с угловой скоростью и противоположно при замедленном вращении.
Частные случаи вращения тела: 1) Равномерное вращение: w = const, j = w t, w = j /t,
2) Равнопеременное вращение: w = w 0 + e t; , здесь начальный угол j 0 =0.
Скорости и ускорения точек вращающегося тела. – скорость любой точки твердого тела, вращающегося вокруг неподвижной оси, равна векторному произведению вектора угловой скорости тела на радиус–вектор этой точки. Модуль векторного произведения: v= w × r × sin( a )= w × (CM) , (СМ) – расстояние от точки М до оси вращения. Направлен вектор скорости по касательной к окружности, по которой перемещается точка М, в сторону вращения.
w x , w y , w z – проекции вектора угловой скорости. Проекция вращательной (окружной) скорости: vx= w y z – w z y; vy= w z x – w x z; vz= w x y – w y x. Если ось вращения совпадает с осью z, то vx= – w y; vy= w x. Ускорение : . Вращательное ускорение , модуль вращат. уск. а вр = e × r × sin a , направлено по касательной к траектории точки, т.е. параллельно скорости. Центростремительное (осестремительное) ускорение , а ц = w 2 × R, направлено по радиусу к оси (центру) вращения. Модуль полного уск.: . Угол, между векторами полного и центростремит-ного ускорений: .
Источник
Способы задания движения точки
Чтобы задать движение точки, надо задать ее положение по отношению к выбранной системе отсчета в любой момент времени. Для этого задания можно применять один из трех способов: естественный, координатный, векторный.
1. Естественный способ задания движения точки
Естественным способом задания движения пользуются в тех случаях, когда траектория движущейся точки известна заранее. Непрерывная линия, которую описывает движущаяся точка относительно данной системы отсчета, называется траекторией точки. Если траектория является прямой линией, то движение точки называется прямолинейным, а если кривой линией – то криволинейным.
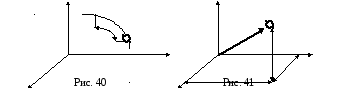
Пусть точка  движется относительно системы отсчета вдоль некоторой траектории
движется относительно системы отсчета вдоль некоторой траектории  (рис. 40). Выберем на этой траектории какую-нибудь неподвижную точку
(рис. 40). Выберем на этой траектории какую-нибудь неподвижную точку  , которую примем за начало отсчета, а затем, рассматривая траекторию как координатную ось, установим на ней положительное и отрицательное направление, как на обычной координатной оси.
, которую примем за начало отсчета, а затем, рассматривая траекторию как координатную ось, установим на ней положительное и отрицательное направление, как на обычной координатной оси.
Тогда положение точки  на траектории будет однозначно определяться криволинейной координатой
на траектории будет однозначно определяться криволинейной координатой  , равной расстоянию от точки
, равной расстоянию от точки  до точки
до точки  , измеренному вдоль дуги траектории и взятому с соответствующим знаком. При движении точка
, измеренному вдоль дуги траектории и взятому с соответствующим знаком. При движении точка  будет перемещаться вдоль траектории, следовательно, расстояние
будет перемещаться вдоль траектории, следовательно, расстояние  будет с течением времени изменяться. Чтобы определить положение точки на траектории в любой момент времени, надо знать зависимость вида:
будет с течением времени изменяться. Чтобы определить положение точки на траектории в любой момент времени, надо знать зависимость вида:
 . (13)
. (13)
Это уравнение выражает закон движения точки. Таким образом, чтобы задать движение точки естественным способом, необходимо знать:
1. Траекторию движения точки;
2. Начало отсчета на траектории с указанием положительного и отрицательного направлений отсчета;
3. Закон движения точки вдоль траектории  .
.
Следует отметить, что величина  определяет положение точки, а не пройденный ей путь. Например, если точка, двигаясь из начала отсчета
определяет положение точки, а не пройденный ей путь. Например, если точка, двигаясь из начала отсчета , доходит до положения
, доходит до положения  , а затем, двигаясь в обратном направлении, приходит в положение
, а затем, двигаясь в обратном направлении, приходит в положение  , то в этот момент ее координата
, то в этот момент ее координата  , а пройденный за это время путь будет равен
, а пройденный за это время путь будет равен .
.
2.Координатный способ задания движения точки
В этом случае положение движущейся точки в пространстве определяют тремя ее декартовыми координатами относительно выбранной неподвижной прямоугольной системы (рис. 41). При движении точки эти координаты являются однозначными и непрерывными функциями времени, т.е. уравнения движения получают в виде
 ,
,  ,
, .(14)
.(14)
При координатном способе задания движения точки траектория в непосредственном виде не дается, но может быть получена из уравнений движения. Исключая из уравнений движения время, получаем два соотношения между координатами  , которые определяют линию, описываемую в пространстве движущейся точкой, т.е. ее траекторию.
, которые определяют линию, описываемую в пространстве движущейся точкой, т.е. ее траекторию.
Если движущаяся точка остается за все время движения в одной и той же плоскости, то, приняв эту плоскость за координатную  , получаем два уравнения движения
, получаем два уравнения движения ,
, .
.
Уравнения движения точки в координатной форме представляют собой уравнение траектории в параметрической форме, где за независимый параметр принято время. Исключая его из уравнений движения, получаем уравнение траектории.
При движении точки в плоскости можно пользоваться не только декартовыми координатами. В этом случае можно ввести в рассмотрение полярные координаты (рис. 42).
Положение точки в этом случае будут определять полярными координатами  и
и , т.е. уравнения движения точки вполярных координатах имеют вид
, т.е. уравнения движения точки вполярных координатах имеют вид  .
.
Тут вы можете оставить комментарий к выбранному абзацу или сообщить об ошибке.
Источник



