
- Скалярное управление частотника в применении к асинхронным двигателям
- Немного элементарной физики
- Технические различия преобразователей
- Скалярный метод
- Векторный метод
- Вариант с частотным микроконтроллером
- Заключение
- Векторное и скалярное управление преобразователем частоты
- Способы управления
- Виды скалярного управления
- Преимущества и недоставки скалярного способа управления
- Сфера применения
- Заключение
Скалярное управление частотника в применении к асинхронным двигателям

Наиболее известный метод экономии энергии – сокращение частоты вращения электродвигателя переменного тока. Поскольку мощность пропорциональна кубу скорости вращения вала, то небольшое снижение скорости может привести к значительной экономии электричества. Насколько это актуально для производства, понимает каждый. Но как этого достичь? На этот и другие вопросы мы ответим, но прежде, поговорим о видах управления асинхронными двигателями.
Электрический привод переменного тока – это электромеханическая система, которая служит основой большинству технологических процессов. Важная роль в ней принадлежит преобразователю частоты (ПЧ), отвечающему заглавную «игру главной скрипки дуэта»–асинхронного двигателя (АД).
Немного элементарной физики
Со школьной скамьи мы имеем ясное представление о том, что напряжение – это разность потенциалов между двумя точками, а частота – это величина, равная количеству периодов, которые ток успевает пройти буквально за секунду.
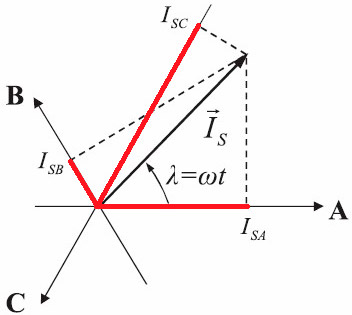
В рамках технологического процесса часто приходится изменять рабочие параметры сети. Для этой цели существуют преобразователи частоты: скалярный и векторный. Почему их так называют? Начнём с того, что особенные черты каждого типа становятся понятными из их названия. Вспомним основы элементарной физики и позволим себе называть ПЧ для упрощения короче. «Векторник» имеет определённое направление и подчиняется правилам векторов. «Скалярник» ничего этого не имеет, поэтому алгоритм метода управления им, естественно, очень простой. С названиями, кажется, определились. Теперь о том, как различные физические величины из математических формул связаны между собой.
Помните, что как только скорость уменьшается, вращающий момент увеличивается и наоборот? Значит, чем больше вращение ротора, тем больший поток пойдет через статор, и, следовательно,будет наводиться большее напряжение.
Тоже самое лежит в принципе действия в рассматриваемых нами системах, только в«скалярнике» управляется магнитное поле статора, а в «векторнике»играет роль взаимодействие магнитных полей статора и ротора.В последнем случае технология позволяет улучшать технические параметры работы двигательной установки.
Технические различия преобразователей
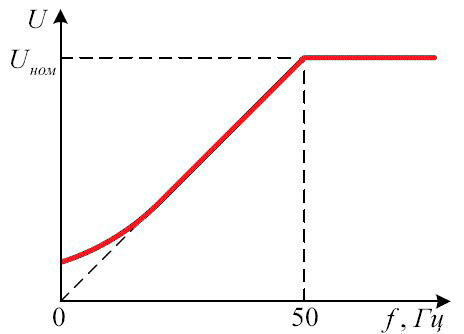
Отличий существует много, выделим самые основные, и без научной паутины слов. У скалярного (бездатчикового) частотника зависимость U/F – линейная и диапазон скоростного регулирования довольно небольшой. Кстати сказать, поэтому на низких частотах недостаёт напряжения для поддержания крутящего момента, и приходится порой настраивать вольт-частотную характеристику (ВЧХ) под рабочие условия, то же самое происходит при максимальной частоте выше 50 Гц.
При вращении вала в широком скоростном и низкочастотном диапазоне, а также выполнении требований авторегулирования момента, используют метод векторного управления с обратной связью. В этом проявляется еще одно различие: у «скалярника» обычно такой обратной связи нет.
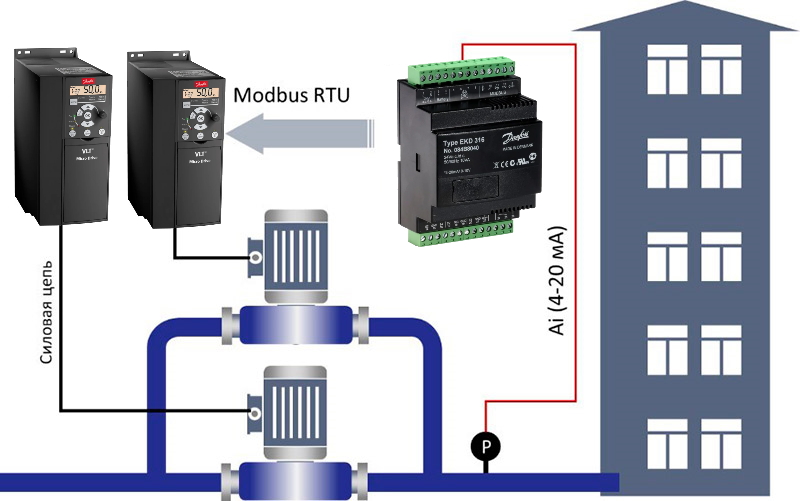
Какие же выбрать ЧП? В применении того или другого устройства, главным образом, руководствуются сферой использования электрического привода. Однако в особых случаях выбор типа преобразователя частоты становится безвариантным. Во-первых: есть явная, заметная разница в цене (скалярные стоят намного дешевле, нет надобности в дорогостоящих вычислительных ядрах). Поэтому удешевление производства порой перевешивает в принятии решения по выбору. Во-вторых: есть сферы применения, в которых возможно только их использование, к примеру, в конвейерных линиях, где несколько электродвигателей синхронно управляются от одного частотно-регулируемого привода (ЧРП).
Скалярный метод
Асинхронный электропривод со скалярным управлением скоростью (т. е. по ВЧХ) так и остаётся по сегодняшнее время самым распространенным. В основе метода лежит то, что скорость двигателя является функцией выходной частоты.
Скалярное управление двигателями – оптимальный выбор для случаев, когда нет переменной нагрузки, и в хорошей динамике нет также потребности. Для работы «скалярника» не требуются какие-либо датчики. При использовании рассматриваемого метода, нет необходимости в дорогостоящем цифровом процессоре, как в случае с векторным управлением.
Метод часто применяется для автоуправления насосными, вентиляторными, компрессорными и иными агрегатами.Здесь требуется, чтобы поддерживалась или скорость вращения вала движка с применением датчика, или иной заданный показатель (к примеру, температура жидкости, контролируемая по соответствующему прибору слежения).
При скалярном управлении частотно-амплитудное изменение напряжения питания определяется по формуле U/fn = const. Это позволяет обеспечить постоянный магнитный поток в двигателе. Способ достаточно простой, легко реализуется, но не без некоторых существенных недостатков:
- не представляется возможным одновременное регулирование моментом и скоростью, поэтому выбирается та величина, которая с технологической точки зрения самая значимая;
- узкий диапазон скоростного регулирования и низкий момент на малых скоростях;
- плохая работа с динамически изменяющейся нагрузкой.
А что собой представляет векторный метод?
Векторный метод
Он возник в процессе усовершенствования, и применяется при требовании реализовать максимальное быстродействие, регулирование в широком скоростном диапазоне и управляемость момента на валу.
В новейших моделях электрических приводов в систему управления (СУ) по этому типу внедряется математическая модель двигателя, которая способна рассчитать момент движка и скорость вращения вала. При этом требуется лишь установка датчиков тока фаз статора.
- высокая точность;
- без рывков, плавное вращение АД;
- широкий диапазон регулирования;
- быстрое реагирование на изменение нагрузки;
- обеспечение рабочего режима двигателя, при коем уменьшаются потери на нагрев и намагничивание, а это ведёт к заветному увеличению КПД!
Плюсы, безусловно, очевидны, но метод векторного управления не лишён и недостатков, таких, как вычислительная многосложность и потребность в знании технических показателей АД. Помимо этого, наблюдаются большие, чем у «скалярника», амплитуды скоростных колебаний при постоянной нагрузке. Главная задача при изготовлении частотного преобразователя(«векторника») – обеспечение высокого момента при небольшой скорости вращения.
Схема векторного СУ с блоком широтно-импульсной модуляции (АИН ШИМ) выглядит примерно так:

На изображённой схеме контролируемым объектом является асинхронный двигатель, имеющий связь с датчиком (ДС) на валу. Изображённые блоки – это в действительности звенья цепи СУ, реализуемой на контроллере. Блок БЗП задаёт значения переменных. Логические блоки (БРП) и (БВП) регулируют и вычисляют переменные уравнения. Сам контроллер и другая механическая часть системы находится в электрическом шкафу.
Вариант с частотным микроконтроллером
Частотный преобразователь тока/напряжения предназначен для плавного регулирования основных величин, а также других показателей работы оборудования. Он функционирует как «скалярник» и «векторник» одновременно, используя математические модели, запрограммированные во встроенном микроконтроллере. Последний монтируется в специальный щиток и является одним из узлов информационной сети системы автоматизации.
Блочный контроллер/преобразователь частоты последнее слово техники, в схеме с ними используют дросселя и ЕМС фильтры, уменьшающие интенсивность входных помех. Надо отметить, что за рубежом данному вопросу уделяется особое внимание.В отечественной же практике использование ЕМС фильтров пока остаётся слабым звеном, так как даже не существует толковой нормативной базы. Сами фильтры у нас применяются чаще там, где они не нужны, и где они действительно необходимы, про них почему-то забывают.
Заключение
Дело в том, что электродвигателю в обычном режиме работы от сети свойственно иметь стандартные параметры, это не всегда приемлемо. Устраняется сей факт путём ввода различных редукторных механизмов для снижения частоты до необходимой. На сегодня сформировались две СУ: бездатчиковая и датчиковая система с обратной связью. Их основное отличие в точности контроля. Наиболее точная, конечно, вторая.
Существующие рамки расширяются с помощью использования разных современных СУ АД, обеспечивающих повышенное качество регулирования, высокую перегрузочную способность. Для рентабельного производства, продолжительности срока службы оборудования и экономичного расхода энергии эти факторы имеют большое значение.
Источник
Векторное и скалярное управление преобразователем частоты
Значительная доля всей генерируемой в мире электроэнергии потребляется двигателями переменного тока. Управление частотой питающего напряжения и тока позволяет снизить энергопотребление на 40-70%, а также повысить КПД и увеличить производительность оборудования.
Правильно подобрать способ управления – одна из главных задач проектировщика, правильное ее решение обеспечивает максимальный технико-экономический эффект. Рассмотрим достоинства и недостатки скалярного управления.
Способы управления
Наибольшее распространение в электроприводах двигателей до 1 кВ получили преобразователи частоты со звеном постоянного тока. Регулирование частоты напряжения в таких устройствах достигается изменением циклов отпирания/запирания транзиторных ключей путем изменения длительности управляющих импульсов широтно-импульсного модулятора ШИМ.
Различают 2 способа управления:
Первый метод заключается в поддержании отношения величины, частоты и фазы напряжения питания двигателя. Такой способ позволяет регулировать скорость вращения вала в широком диапазоне, управлять моментом, обеспечивать жесткость механических характеристик во всем интервале частот, осуществлять пуск со значительной нагрузкой.
Однако, такой метод имеет свои недостатки. Главный из них – значительная вычислительная сложность. Векторные преобразователи частоты комплектуются высокопроизводительными контроллерами, что ведет к значительному удорожанию ПЧ. Такое оборудование используется в приводах механизмов с динамической нагрузкой, грузоподъемных устройств, точных механизмов и т.д.
Принцип скалярного или вольт-частотного управления заключается в поддержании постоянного числа U/f (скалярной величины и частоты напряжения питания) при любой угловой частоте вращения вала. При этом контролируется только величина и фаза напряжения на выходе частотного преобразователя. Рассмотрим принцип и виды скалярного регулирования подробнее.
Виды скалярного управления
Поддержание постоянной величины U/f обеспечивает относительно постоянный магнитный поток в зазоре двигателя. Если отношение напряжение/частота растет, электродвигатель переходит в перевозбужденное состояние, если снижается – электрическая машина приходит в невозбужденном состоянии.
Отношение U/f вычисляется из номинальных величин напряжения и частоты двигателя, фаза при этом не учитывается, таким образом, вычислительная сложность для устройства управления ШИМ не велика. Скалярные ПЧ комплектуют простыми контроллерами.
Различают 2 метода скалярного управляния:
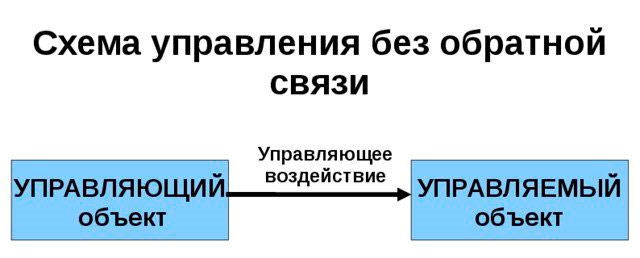
- Без обратной связи.
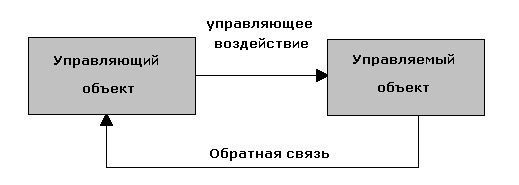
- С обратной связью по скорости вала.
Вольт-частотный способ без обратной связи широко применяется в схемах управления асинхронными электродвигателями, в приводе оборудования, работающего с постоянной нагрузкой.
Благодаря простой конструкции без датчиков обратной связи, невысоких требований к вычислительной способности управляющего блока, относительной низкой стоимости, такие ПЧ массово используються в несложных электроприводах. Скалярный метод позволяет реализовать групповое управление однотипными электродвигателями с одновременным пуском и остановкой.
Вольт-частотный способ управления с энкодером (датчиком оборотов или скорости) позволяет существенно расширить возможности метода. При этом величина U/f поддерживается при различных скоростях.
При возрастании угловой частоты вращения вала, напряжение на обмотках статора двигателя также должно увеличиваться. Однако, в асинхронных электрических машинах частота вращения магнитного поля статора не совпадает со скоростью вала. Скольжение при этом зависит от нагрузки. Для компенсации скольжения в схему электропривода добавляют датчик скорости или энкодер. Обратная связь позволяет повысить точность поддержания скорости до 0,03%. Таким образом, скалярное управления с энкодером позволяет устранить недостаточную точность регулирования угловой частоты вала.
К недостаткам метода относятся усложнение схемы, необходимость монтажа и настройки энкодера.
Преимущества и недоставки скалярного способа управления
Главное достоинство вольт-частотных ПЧ – простота и невысокая стоимость. Цена такого оборудования значительно меньше векторных преобразователей частоты. В схемах управления не нужно устанавливать датчик скорости на вал. Настройка скалярного преобразователя частоты также намного проще. Такие устройства также позволяют управлять несколькими электродвигателями.
Один из недостатков вольт-частотного управления – зависимость скорости вала от нагрузки. Без обратной скорости невозможно компенсировать скольжение ротора. Такое оборудование также не позволяет управлять частотой вращения и моментом на валу одновременно. Скалярные частотные преобразователи также не обладают высокой перегрузочной способностью. Еще один существенный недостаток – потеря жесткости механических характеристик на небольших скоростях.
Сфера применения
Несмотря на совершенствование векторного способа управления, скалярные частотные преобразователи по-прежнему широко используются. Область применение таких ПЧ – электроприводы различного назначения с постоянной или изменяющейся по известному закону нагрузкой.
Применение вольт-частотных преобразователей в вентиляционном и насосном оборудовании позволяет:
- Осуществлять управление потоком воздуха или давлением и расходом жидкостей без механических заслонок и задвижек.
- Осуществлять плавный пуск и остановку без риска гидравлических ударов в системе.
- Автоматически пропускать резонансные частоты при управлении воздухообменными установками.
При помощи скалярных преобразователей можно задать режимы работы насосного или воздуходувного оборудования по известным законам регулирования.
Установка ПЧ в приводе станков:
- Существенно упрощает кинематическую схему, частотное управление позволяет отказаться от передаточных механизмов.
- Увеличивает точность обработки, при точном задании скорости существенно снижется количество брака.

Преобразователи частоты снижают стоимость производства путем снижения расходов на электроэнергию.
ПЧ также устанавливают на двигатели конвейеров и других механизмов подачи. Это позволяет:
- Точно задавать скорость перемещения под конкретные технологические процессы.
- Осуществлять остановку при возникновении аварий.
- Исключить удары и рывки при пуске, работе и остановке.

Преобразователи частоты снижают износ механических узлов конвейерного оборудования, а также позволяют задавать режимы автоматического управления в зависимости от специфики производственных процессов.
Заключение
Выбор метода управления осуществляется на основании технических требований и экономических расчетов. Недорогие скалярные частотные преобразователи применяются в двигателях оборудования с постоянной нагрузкой, невысокими требованиями к перегрузочной способности, при отсутствии необходимости одновременной регулировки скорости и момента, а также точного регулирования скорости при оборотах ниже номинального значения.
Векторные преобразователи используют в приводах оборудования с высокодинамичной нагрузкой, при необходимости точного позиционирования, пуска с высоким моментом и в других сложных условиях.
Источник



