
Способы движения агрегатов
Движение МТА при работе на участке характеризуется определенной цикличностью. В каждый цикл входят рабочий ход и поворот для изменения направления движения. Повторяющееся чередование рабочих ходов, поворотов и заездов называется способом движения агрегата. Насчитывается более 50 различных способов движения МТА.
При выборе способа движения МТА на данном участке поля необходимо учитывать возможность получения наибольшей производительности и экономичности работы агрегата с обязательным выполнением агротребований.
Основные способы движения:
1. Челночный ¾ гоновый петлевой способ (рис. 2.25). Используется в основном при работе симметричных агрегатов (посев, посадка, культивация и др.).
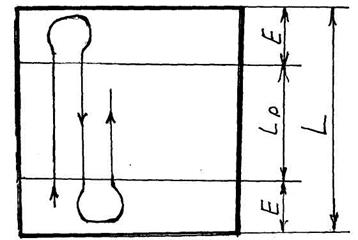
Рис. 2.25 Схема челночного способа движения агрегатов
Коэффициент рабочих ходов
j  .
.
Для определения j необходимо найти общую длину рабочих и холостых ходов на загоне (участке).
Если рабочая длина загона  , а его ширина С, ширина захвата агрегата
, а его ширина С, ширина захвата агрегата  , то общая длина рабочих ходов (м) :
, то общая длина рабочих ходов (м) :

где  ¾ число рабочих ходов на загоне.
¾ число рабочих ходов на загоне.
Число холостых поворотов на загоне, как правило, на один меньше, чем рабочих ходов. Однако, учитывая, что агрегат после обработки первого загона переезжает на второй, для расчетов можно принять количество рабочих и холостых ходов одинаковым, т.е.  .
.
j  .
.
Аналогично j можно определить и для других способов движения.
2. Гоновые способы движения всвал и вразвал (рис. 2.26) применяются при вспашке, уборке и других работах.

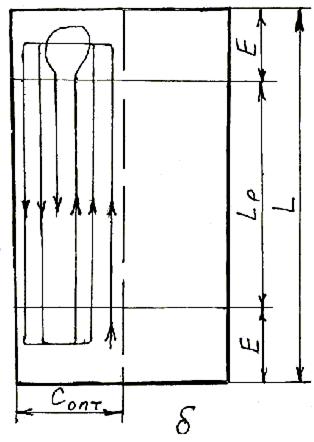
Рис. 2.26 Схема движения агрегата всвал (а) и вразвал (б)
При работе всвал и вразвал для уменьшения холостого пути участок целесообразно разбивать на загоны оптимальной ширины. Оптимальная ширина загона определяется по выражению:
 .
.
3. При уборке пропашных культур зачастую применяется беспетлевой способ движения с перекрытием.
4. Круговой способ движения применяется на уборке силосных, зерновых культур и других работах.
5. Диагонально-челночный и диагонально-перекрестный способы движения используются при бороновании, дисковании и других работах.
При изучении технологии механизированных работ будет более детально изучаться тот или иной способ движения.
При выборе способа движения в первую очередь исходят из агротехнических требований к качеству работы, удобству обслуживания, возможности уменьшения количества вспомогательных операций. Если эти условия позволяют применять различные способы движения, следует выбирать тот, который обеспечивает максимальное значение j .
При работе МТА необходимо учитывать:
1) на коротких участках коэффициент рабочих ходов больше у агрегатов с меньшей шириной захвата;
2) чем больше радиус поворота (  ), тем меньше значение коэффициента
), тем меньше значение коэффициента
рабочих ходов (j);
3) чем больше длина гона  , тем меньше радиус поворота агрегата влияет на величину коэффициента рабочих ходов (j);
, тем меньше радиус поворота агрегата влияет на величину коэффициента рабочих ходов (j);
4) на участках с малой длиной гона целесообразно применять беспетлевой (лучше всего комбинированный) способ движения, а при больших
длинах гона ¾ петлевой (обычно с чередованием работы всвал и вразвал).
Нам важно ваше мнение! Был ли полезен опубликованный материал? Да | Нет
Источник
Способы движения агрегатов и их оценка
Различают три основных вида движения агрегатов (по направлению рабочих ходов относительно границ рабочего участка): гоновый (рабочие ходы вдоль одной из сторон участка), диагональный (под углом, диагонально к сторонам участка, разновидность — диагонально-перекрестный) и круговой (рабочий ход вдоль всех сторон участка или загона, различают круговое движение к центру или к периферии участка).
Круговые способы движения представлены на рисунке 8.4. Движение вкруговую выполняется чаще всего по свертывающейся спирали, от периферии к центру (рис. 8.4а), в этом случае не нужна разметка центральной части. Способ (рис. 8.4б) отличается наличием внутренних поворотных полос, которые либо готовятся заранее (прокашиваются, убираются), либо заделываются после обработки загона или участка. Способ (рис. 8.4в) — обработка от центра, в этом случае надо найти центр и разметить место и длину первого прохода.
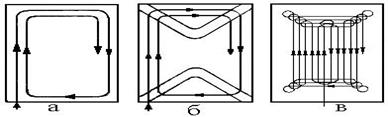
Рисунок 8.4 – Разновидности круговых способов движения:
а — при свертывающейся спирали без выключения рабочих органов и поворотных полос; б — то же, но с внутренними поворотными полосами; в — по развертывающейся спирали, конвертный способ
На рисунке 8.5 представлены диагональные способы движения для рабочих участков или загонов по форме близких к квадрату. Если загон имеет форму вытянутого прямоугольника, то он делится разбивкой на части, близкие к квадратной форме. Если здесь нужны поворотные полосы, то они отбиваются вдоль всех сторон участка.
|
На рисунке 8.6 представлены наиболее распространенные гоновые способы движения. Способ движения перекрытием беспетлевой, однако нуждается в частой разметке поля, лучше использовать при обработке уже размеченного поля (в виде рядков растений, когда надо просто отсчитать необходимое число рядков). Челночный способ движения однообразен и легок по выполнению. Способы движения всвал и вразвал наиболее распространены (чередованием по загонам) на вспашке. Их комбинированное использование на одном загоне позволяет получить беспетлевой способ движения при вспашке.
Различные способы движения агрегатов сравнивают по качеству выполнения технологической операции, удобству обслуживания, безопасности работы, затратам на подготовку рабочего участка. Все показатели тесно связаны с выполняемой работой, размерами рабочего участка, составом агрегата и его кинематическими характеристиками. Все это удобнее рассмотреть при изучении технологии выполнения отдельных сельскохозяйственных работ.
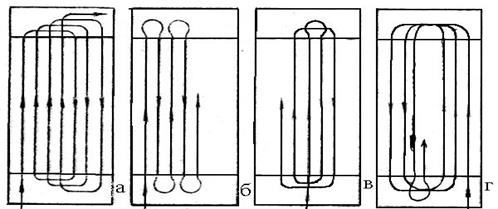
Рисунок 8.6 – Гоновые способы движения:
а — перекрытием; б — челночный; в — всвал; г — вразвал
Одной из главных оценок способов движения, влияющих на производительность агрегатов, является коэффициент рабочих ходов или степень использования пути
 , (8.6)
, (8.6)
где ΣLр и ΣLх — суммарная длина рабочих и холостых ходов на загоне; nр и nх — число рабочих и холостых проходов на загоне.
Для всех гоновых способов движения Lр=Lуч-2Е, а nр=nх=С/Вρ. В длину холостых ходов нужно включать не только длину пути на поворотах, но и дополнительные проходы, связанные с заделкой поворотных полос, проходы с неполной шириной захвата, заезды и переезды на рабочем участке.
При беспетлевых гоновых способах движения средняя длина холостого хода Lх.ср=1.14ρу+0.5С+2е и отсюда коэффициент рабочих ходов
 . (8.7)
. (8.7)
Для петлевых способов движения (всвал, вразвал) на участках шириной до 2ρу имеют место петлевые повороты, их число nпетл=2ρу/Вρ. Длина петлевых холостых ходов на загоне составила бы ΣLх петл=(2ρу/ Вρ)(6ρу+е). Если бы эти повороты выполнялись без петель (при ширине участка 2ρу), то их общая длина ΣLхбесп=(1.14ρу+2е+ρу)2ρу/Вρ. Тогда разница в длине холостого хода составит ΔLх=3.86ρу2ρуВρ≈ 8ρу 2 /Вρ. С учетом (8.6) и отнеся ΔLх к числу проходов nр=С/8ρу, получим коэффициент рабочих ходов для петлевых (всвал, вразвал) способов движения
 . (8.8)
. (8.8)
Для челночного способа движения все холостые ходы одинаковы Lх=6ρу+2е и коэффициент рабочих ходов
 . (8.9)
. (8.9)
Оптимальная (по производительности) ширина загона Сопт определяется из условия минимальной суммарной длины холостых или максимального коэффициента рабочих ходов на участке.
Суммарная длина холостых ходов на участке Sх.уч=ΣLх(Суч/С), тогда для петлевого способа движения с учетом (8.7)
 . (8.10)
. (8.10)
Возьмем первую производную для Sх уч по ширине загона С и приравняем ее нулю
 ,
,
 . (8.11)
. (8.11)
Минимальная (по возможности осуществления) ширина загона (Сmin) применима только к беспетлевым способам (например, способ движения перекрытием, комбинация всвал-вразвал). Беспетлевой поворот возможен только при Х≥2ρу, если загон будет содержать три или четыре таких минимальных делянки, то и минимальная ширина загона для беспетлевого способа движения будет равна шести или восьми условным радиусам поворота агрегата.
Для беспетлевых способов движения, как правило, расчетное значение Сопт меньше Сmin и, следовательно, физически не может быть осуществлено. Поэтому для беспетлевых способов Сопт обычно не рассчитывают, а принимают равным Сmin.
Коэффициент рабочих ходов для петлевых способов движения (С=Сопт) определяется по формуле
 , (8.12)
, (8.12)
а для беспетлевых способов движения (С=Сmin) равен
 . (8.13)
. (8.13)
При выборе того или иного способа движения надо исходить в первую очередь из агротехнических требований — качества работы, удобства обслуживания, возможности уменьшения вспомогательных операций и т.д. Если эти условия позволяют применять различные способы движения, следует выбирать тот, который дает более высокое значение φ.
Наибольшее влияние на значение коэффициента рабочих ходов оказывает Lр. Чем больше радиус поворота ρу, тем меньше φ. Ширина загона С почти не оказывает влияния на φ при челночном способе движения. Отклонение от Сопт и Сmin в сторону увеличения с целью обеспечения целого числа проходов агрегата на загоне, удобства разбивки на загоны и т.д. не дает существенного уменьшения φ. В случае отклонения от Сопт в сторону уменьшения ширины загона величина φ снижается значительно.
Вопросы для самоконтроля знаний
1. Что понимается под кинематикой агрегата?
2. Перечислите кинематические характеристики МТА, дайте их характеристику.
3. Какие виды поворотов МТА Вы знаете?
4. Запишите формулу для расчета длины грушевидного поворота.
5. Запишите формулу для расчета минимальной ширины поворотной полосы для различных видов поворота.
6. Какие виды движения МТА Вы знаете?
7. Назовите способы движения МТА при гоновом виде движения.
8. Изобразите способы движения МТА «перекрытием», «челночный», «всвал» и « «вразвал».
9. Запишите формулу для расчета коэффициента рабочихходов МТА.
10. Запишите формулу для расчета оптимальной ширины загона для беспетлевого способа движения МТА.
Источник
Способы движения по виноградникам
СПОСОБЫ ДВИЖЕНИЯ АГРЕГАТОВ
При выполнении работ можно применять несколько способов движения агрегатов. Поэтому в каждом случае надлежит выбрать оптимальный, обеспечивающий хорошее качество выполнения работ и высокую производительность труда.
При обработке молодых и плодоносящих виноградников применимы только гоновые петлевые и беспетлевые способы движения. При этом прямолинейность и параллельность рабочих ходов агрегата определяются самой рядовой посадкой кустов и шпалерным содержанием насаждений. Качественную и экономическую целесообразность того или иного способа движения агрегата принято оценивать по величине коэффициента рабочих ходов ф, представляющего отношение длины рабочих ходов к полному пути движения агрегата:

где Sр —длина рабочего пути агрегата (длина загона), м; SХ— длина холостого пути агрегата (повороты), м.
Как видно из уравнения, для повышения коэффициента рабочих ходов необходимо увеличивать длину гона и уменьшать длину пути поворота агрегатов. Учитывая это, а также практический опыт работы в виноградниках, целесообразно для агрегатов, работающих по уходу за молодыми и плодоносящими насаждениями, рекомендовать гоновые петлевые и беспетлевые способы движения: челночный, односторонне-челночный и перекрытием.
При этих способах движения холостые заезды и повороты агрегатов делают на поворотных полосах по краям участков. Так как длина холостых заездов не связана с шириной участка, то коэффициент рабочих ходов φ будет иметь наибольшую величину. Петлевой челночный способ движения агрегата (рис. 93, а) может быть эффективно применен в том случае, если ширина поворотной полосы позволяет передвигать агрегат на повороте без перегрузки механизмов и повреждения насаждений на максимально допустимой скорости. Ширина поворотной полосы при петлевых поворотах определяется приближенно по уравнению, рекомендованному И. П. Полкановым:

где Е — ширина поворотной полосы, м; R — радиус поворота агрегата, м; е — длина выезда агрегата из междурядья (расстояние от якорей шпалеры до контрольной линии 0,5— 0,7 м).

Петлевые повороты при гоновых способах движения рекомендовано применять только для симметричных агрегатов, когда в машинах есть устройства для быстрого переключения рабочих органов на холостой ход. В таком случае агрегат на поворотах не изменяет скорости движения, но для этого нужна сравнительно широкая поворотная полоса. При петлевых поворотах ширина поворотной полосы Е всегда больше, чем при беспетлевых поворотах. Петлевой челночный способ движения в виноградарстве применяется при выравнивании плантажа и посадке. Значения величины коэффициента рабочих ходов ср в зависимости от длины гона для этого способа движения агрегатов следующие (м):
 На участках виноградников, где одна из поворотных полос по ширине не обеспечивает поворота агрегата, при установленном радиусе и скорости применяется односторонне-челночный способ движения: агрегат делает рабочий ход в междурядьте в одну сторону, затем беспетлевой поворолт с остановкой агрегата (на зауженной поворотной полосе) с холостым проходом мимо одного междурядья, рабочий ход в обратную сторону, петлевой поворот на широкой поворотной полосе без снижения скорости и рабочий ход с другой стороны того же ряда. Значения коэффициента φ для этого способа движения следующие (м):
На участках виноградников, где одна из поворотных полос по ширине не обеспечивает поворота агрегата, при установленном радиусе и скорости применяется односторонне-челночный способ движения: агрегат делает рабочий ход в междурядьте в одну сторону, затем беспетлевой поворолт с остановкой агрегата (на зауженной поворотной полосе) с холостым проходом мимо одного междурядья, рабочий ход в обратную сторону, петлевой поворот на широкой поворотной полосе без снижения скорости и рабочий ход с другой стороны того же ряда. Значения коэффициента φ для этого способа движения следующие (м):

Беспетлевые челночные способы движения агрегатов (рис. 91, б) и перекрытием (рис. 91, в) требуют меньшей ширины поворотной полосы, так как агрегат поворачивают на малой скорости. В этом случае ширину поворотной полосы определяют по уравнению
Учитывая, что холостой ход агрегата при этом способе движения уменьшается, значение коэффициента рабочих ходов несколько увеличивается (м):
 Беспетлевые челночные способы движения наиболее целесообразно применять для агрегатов с навесными и полунавесными мишинами на культивации, глубоком рыхлении и вспашке междурядий, а также при подкормке насаждений, уборке лозы, опрыскивании, чеканке, вывозке винограда из междурядий и других. Способ движения с перекрытием применяют при работе агрегатов на размотке проволоки, обновлении плантажа одновременно с глубоким внесением удобрений, опрыскивании, опыливании, обрезке лозы и др.
Беспетлевые челночные способы движения наиболее целесообразно применять для агрегатов с навесными и полунавесными мишинами на культивации, глубоком рыхлении и вспашке междурядий, а также при подкормке насаждений, уборке лозы, опрыскивании, чеканке, вывозке винограда из междурядий и других. Способ движения с перекрытием применяют при работе агрегатов на размотке проволоки, обновлении плантажа одновременно с глубоким внесением удобрений, опрыскивании, опыливании, обрезке лозы и др.
Сравнивая петлевые и беспетлевые способы движения агрегатов, видим, что при малой длине гона (100—500 м) наиболее эффективны челночные беспетлевые способы и с перекрытием, когда удельный вес рабочих ходов несколько больше. Так, если при петлевых способах движения при длине гона 100—300 м количество рабочих ходов к общему пути агрегата составляет 74—87%, то при беспетлевых 84—93%.
На длинных гонах — 1000 м и выше — коэффициенты рабочих ходов ср, петлевых и беспетлевых способов движения значительно увеличиваются и практически становятся одинаковыми. Поэтому при организации работы на виноградниках необходимо стремиться к увеличению длины гона.
 Предшествующие ручные операции (обрезка, подвязка лозы, уборка винограда) надо выполнять так, чтобы направление линии работ было не поперек, а вдоль насаждений.
Предшествующие ручные операции (обрезка, подвязка лозы, уборка винограда) надо выполнять так, чтобы направление линии работ было не поперек, а вдоль насаждений.
Источник



