
Теодолитная съемка
Способы теоделитной съемки
Теодолитную съемку обычно используют при создании контурных план небольших участков местности. Положение точек относительно опорных точек и сторон в полевых условиях определяют несколькими способами, основными из которых являются следующие.
Способ перпендикуляров
Способ перпендикуляров используют для съемки точек, расположенных на открытой местности вблизи сторон теодолитного хода. Для определения положения углов здания к 1 , к 2 , к 3 достаточно опустить на линию 23 теодолитного хода перпендикуляры и измерить расстояния d 1 , d 2 , d 3 от твердой точки 2 по линии теодолитного хода до оснований перпендикуляров и длины перпендикуляров p 1 , р 2 , р 3 ( рис. 1.20 ).
Способ линейной засечки
Способ полярных координат
Способ угловой засечки
Способ угловой засечки используют при съемке удаленных труднодоступных местных предметов (трубы, шпили, антенны и т. п.). Определяемая, точка получается путем пересечения направлений из двух и более точек теодолитного хода (для контроля — не менее чем с трех направлений). Углы β 1 и β 2 ( рис. 1.22, в ) измеряют теодолитом, при этом угол γ при определенной точке Т должен быть в пределах 30-150° (наилучшая засечка при γ = 90°).
Способ створов
Способ створов обычно применяют при внутриквартальной съемке, когда съемка основных контуров выполнена. Створом может быть линия, сочиняющая две твердые точки или два твердых контура (рис. 1.22, г). Путем линейных измерений на линии створа получают точки В’, С’, из которых линейной засечкой (или другим способом) получают снимаемую точку. Кроме cъемки всех точек ситуации для уточнения составленного плана выполняют обмеры по фасадам всех строений, заборам и т. п. На перекрестках проездов измеряют диагональные расстояния между углами кварталов и ширину проездов. Контрольные промеры делают между смотровыми колодцами подземных коммуникаций, мачтами, столбами воздушных линий связи и т. п.
При теодолитной съемке заполняется абрис — схематический чертеж, на котором изображают вершины и створы теодолитного хода, снятую с них ситуацию, записывают результаты угловых и линейных измерений ( рис. 1.23 ). Абрис составляют непосредственно во время съемки. При составлении абриса на нескольких листах должно быть перекрытие изображения, т. е. последующий лист должен начинаться с точек, которыми закончился предыдущий. Абрис является исходным документом для составления плана теодолитной съемки, поэтому его нужно составлять четко, аккуратно, чтобы при его использовании не было разночтений и неопределенностей.

Рис. 1.23 Абрис теодолитной съемки
| № точки | Угол | Расстояние, м |
| Станция I | ||
| Луч | 0°00′ | |
| 1 | 66 17 | 53,4 |
| 2 | 127 15 | 55,3 |
| 3 | 18051 | 56,3 |
| 4 | 21232 | 40,7 |
| 5 | 197 11 | 44,9 |
| Станция II | ||
| F | 0°00′ | |
| 6 | 315 13 | 47,4 |
| 7 | 81 11 | 38,7 |
| 8 | 291 14 | 29,6 |
Камеральные работы
На листе плотной бумаги с помощью координатографа, линейки Ф. В. Дробышева или другим методом строят прямоугольную сетку квадратов со сторонами 100 мм. Наиболее доступным способом построения сетки является проведение через поле листа двух диагоналей, от пересечения которых откладывают одинаковые отрезки. Соединив концы отрезков, получают прямоугольник, на сторонах которого откладывают стороны квадратов, при этом квадраты должны располагаться так, чтобы после их оцифровки изображение теодолитного хода и снимаемого участка было примерно в середине листа бумаги. По координатам наносят точки теодолитного хода, а затем (по данным абриса составляют план, используя условные знаки для планов данного масштаба.
Источник
МЕТОДЫ СЪЕМКИ ПОДРОБНОСТЕЙ МЕСТНОСТИ




![]()
![]()
Съемку характерных подробностей ситуации местности производят в зависимости от конкретных условий местности и имеющихся в наличии приборов одним из следующих способов: прямоугольных координат; полярным; прямых угловых засечек; линейных засечек; обхода; створов; на-земно-космическим.
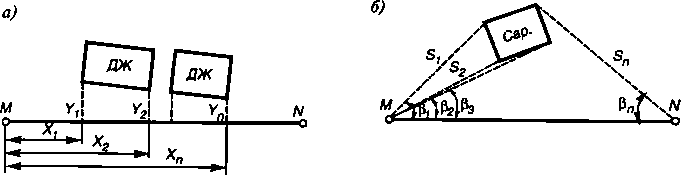
Рис. 15.1. Схема теодолитной съемки методом координат: а — прямоугольных; б — полярных
При съемках методом прямоугольных координат положение каждой ситуационной точки местности устанавливают по величинам абциссы X (расстоянием от ближайшей точки съемочного обоснования по стороне теодолитного хода или расстоянием от начала трассы) и ординатой У (расстоянием от соответствующей стороны теодолитного хода или от трассы) (рис. 15.1, а). Определение ординат У обычно производят с помощью зеркального эккера и рулетки.
Метод прямоугольных координат наиболее часто используют при съемке притрассовой полосы линейных сооружений в ходе разбивки пикетажа. Ширину съемки притрассовой полосы в масштабе 1:2000 принимают по 100 м в обе стороны от трассы, при этом в пределах ожидаемой полосы отвода съемку ведут инструментально, а далее глазомерно.
Теодолитную съемку методом полярных координат применяют преимущественно в открытой местности, при этом положение каждой ситуационной точки определяют горизонтальным углом Р, измеряемым от соответствующей стороны теодолитного хода, и расстоянием 5, измеряемым от соответствующей точки съемочного обоснования (рис. 15.1, б). Съемку характерных точек местности наиболее часто осуществляют оптическими теодолитами с измерением расстояний нитяным дальномером.
Съемка методом полярных координат оказывается особенно эффективной при использовании электронных тахеометров.
Метод прямых угловых засечек применяют главным образом в открытой местности, там, где не представляется возможным производить непосредственное измерение расстояний до интересуемых точек местности. Положение каждой снимаемой точки относительно соответствующей стороны теодолитного хода (базиса) определяют измерением двух горизонтальных углов $\ и р2> примыкающих к базису (рис. 15.2, а). В качестве базиса обычно служит одна из сторон съемочного обоснования или ее часть. Съемку методом прямых угловых засечек обычно ведут оптическими теодолитами и особенно часто используют при производстве
 |
 б)
б)
Метод линейных засечек применяют, если условия местности позволяют легко и быстро производить линейные измерения до характерных ситуационных точек местности. Измерения производят лентами или рулетками от базисов, расположенных на сторонах съемочного обоснования. Положение каждой снимаемой точки местности определяют измерением двух горизонтальных расстояний $1 и 8г с разных концов базиса (рис. 15.2, б).
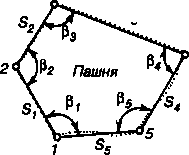
Метод обхода реализуют проложением теодолитного хода по контуру снимаемого объекта с привязкой этого хода к съемочному обоснованию. Углы рь Рг. Ри снимают при одном положении круга теодолита, а измерения длин сторон осуществляют землемерной лентой или рулеткой, нитяным дальномером или светодальномером электронного тахеометра (рис. 15.3, а).
Метод обхода используют, как правило, в закрытой местности для обозначения недоступных объектов значительной площади: болота, запретные зоны, территории хозяйственных объектов и т. д.
Суть метода створов состоит в том, что на прямой между двумя известными точками, размещенными на сторонах съемочного обоснования
°) о б)
 |
| N -о |
 5,
5,
.с
■о—
Рис. 15.3. Схема теодолитной съемки методами: а — обхода; б — створов
(например М и Ы), с помощью одного из мерных приборов определяют положение характерных ситуационных точек местности (рис. 15.3, б).
Метод створов находит применение, главным образом, при изысканиях аэродромов, для установления ситуационных особенностей местности в ходе топографических съемок методом геометрического нивелирования по квадратам. При производстве изысканий других инженерных объектов метод створов применяют крайне редко.

Наземно-космический метод горизонтальной съемки состоит в том, что для получения плановых координат характерных ситуационных точек местности используют приемники систем спутниковой навигации «ОР8». Учитывая высокую стоимость приемников ОР8 высокого класса точности («геодезическою класса»), можно воспользоваться сравнительно недорогими приемниками среднего класса точности («класса ГИС»), но при использовании их в режиме работы с базовыми станциями — «дифференциальными ОР8 — ООР8».
Принцип горизонтальной съемки наземно-космическим методом в режиме «ООР8» состоит в получении координат ситуационных точек местности с геодезической точностью посредством корректирующих сигналов приемниками «ОР8» среднего класса от базовой станции «ЭОР8», установленной на точке местности с известными координатами (например, на пункте государственного геодезической сети). Обычно одна базовая станция обслуживает съемку приемниками «ОР8» в радиусе до 10 км.
Источник
Теодолитная съемка, способы съемки ситуации
![]()
![]()
ПРИМЕНЕНИЯ.
Объекты местности изображают на планах и картах условными знаками, но одни объекты имеют значительные размеры (озеро, лес…), другие объекты малы (колодец, мост…). Объекты, размеры которых значительны, отображают в масштабе данной карты с сохранением подобия контуров, для малых объектов такое отображение невозможно. В связи с этим все условные знаки делят на 3 группы: масштабные (контурные), внемасштабные и пояснительные.
Масштабные (контурные) – служат для изображения объектов в масштабе плана или карты.
Внемасштабные – отображают небольшие, но важные предметы, которые из-за своих небольших размеров не могут быть указаны в масштабе (центровые, осевые, основные).
Пояснительные условные знаки, представленные значком, числом, надписью или всем этим вместе, служат для дополнительной характеристики объектов.
Условные знаки применительно к различным масштабам приводятся в специальных каталогах, издаваемых Главным управлением геодезии и картографии (ГУГК).
Теодолитная съемка, способы съемки ситуации.
Целью теодолитной (горизонтальной) съемки является составление контурного плана местности. Съемка элементов ситуации на местности производится относительно пунктов и сторон теодолитного хода съемочного обоснования. На рис.40 показан абрис теодолитной съемки по линии 1-2 теодолитного хода. Арабскими цифрами в кружках указаны точки, положение которых получено следующими способами съемки ситуации:
1 — прямоугольных координат;
2 — линейной засечки;
3 — угловой засечки;
4 — полярных координат;
При съемке способом прямоугольных координат, положение точки 1 определено координатами Х = 72.4 м, У = 9.8 м от линии теодолитного хода 1-2. Приложив нулевой штрих рулетки к углу дома (точка 1), на ленту расположенную на линии 1-2 теодолитного хода опускают перпендикуляр и отсчитывают его длину по рулетке (9.8 м), по ленте — расстояние от пункта 1 съемочного обоснования до основания перпендикуляра (72.4 м). Перпендикуляры длиной до 4. 8 в зависимости от масштаба съемки восстанавливаются визуально, а при использовании эккера могут быть увеличены примерно в пять раз. Эккер — прибор для построения на местности прямых углов.
Способом линейных засечек определено положение второго угла дома (точки 2). Для этого на местности измерено расстояния 10.6 и 9.8 м от опорных точек на линии с абсцисами соответственно 54.1 и 64.0. Угол дома на плане окажется в точке пересечения дуг с радиусами измеренных расстояний.
Способом угловой засечки на плане может быть получена точка 3. Для этого измерены теодолитом углы 33 35′ и 65 05′.
Способ полярных координат предусматривает измерение на местности (точка 4) полярного угла (70 00′) и его стороны (35.3 м).
Способ створа (вертикальная плоскость через две точки) использован при съемке точки пересечения ручьем линии теодолитного хода (точка 5). Расстояние (10.5 м) измерено по створу от пункта 1.
Способ обмера элементов ситуации применяют для контроля полевых измерений и графических построений на плане.
Съемку производят с исходных точек — пунктов любых опорных и съемочных геодезических сетей. Съемочная сеть может быть
создана в виде теодолитно-нивелирных ходов, когда отметки точек теодолитного хода определяют геометрическим нивелированием. В большинстве случаев для съемки прокладывают тахеометрические ходы, отличающиеся тем, что все элементы хода (углы, длины линий, превышения) определяют теодолитом или тахеометром-автоматом. При этом одновременно с проложением тахеометрического хода производят съемку. В этом главное отличие тахеометрической съемки от других видов топографических
Прибор состоит из подставки, которую устанавливают на три
подъемных винта 7. В отверстие подставки 2 входит ось 11 вращения лимба 3, в которую, в свою очередь, входит ось 10 алидады 4.
Лимб — рабочая мера теодолита — представляет собой круг с делениями. Алидада — часть прибора, расположенная соосно с лимбом, на которой имеются элементы отсчетного устройства и две
подставки 5, несущие ось вращения НН зрительной трубы
алидады укреплен цилиндрический уровень 9. Зрительная труба
теодолита представляет собой визирное устройство, содержащее
объектив, окуляр и сетку нитей. Уровень служит для приведения в
определенное положение прибора в целом и отдельных узлов от-
носительно отвесной линии. К основным частям теодолитов от носятся наводящее и закрепительное устройства, служащие для наведения зрительной трубы на визирную цель и закрепления подвижной части прибора в заданном направлении.
Основным угломерным прибором на местности является теодолит — оптико-механический прибор, с помощью которого измеряют горизонтальные и вертикальные углы, расстояния и магнитные азимуты
Угловые измерения необходимы для определения взаимного положения точек в пространстве и используются при развитии триангуляционных сетей, проложений полигометрических и теодолитных ходов, выполнении топографических съемок, решении многих геодезических задач при строительстве различных объектов. Необходимая точность измерений и построений горизонтальных и вертикальных углов на местности составляет от десятых долей секунды до одной минуты.
.По точности теодолиты различают трех типов: высокоточные — ТО5,Т1; точные -Т2, Т5 и технические — Т15, Т30. В перечисленных типах теодолитов цифры соответствуют точности (средней квадратической погрешности) измерения горизонтального угла одним приемом в секундах.
Основные геометрические оси теодолита:
1. ОО1 — ось вращения прибора (вертикальная ось теодолита),
2. UU1 — ось цилиндрического уровня (касасельная к внутренней поверхности ампулы в нульпункте),
3. WW1 – визирная ось зрительной трубы (прямая, соединяющая оптический центр объектива и крест сетки нитей),
4.VV1 — ось вращения зрительной трубы.
Нивелиры с ц и л и н д р и ч е с к и м уровнем имеютзри-
тельную трубу и цилиндрический уровень. Труба с уровнем укреплена на вертикальной вращающейся оси, входящей в подставку. Наиболее распространенные нивелиры этого типа Н-3, Н-10.
Нивелир Н-3 (рис. 7.6, а) состоит из верхней части, несущей зрительную трубу 6 с цилиндрическим 7 и круглым 3 уровнями, ос нованием, наводящим 11, элевацйонным 4 и закрепительными 9 винтами, и нижней, представляющей собой подставку с тремя подъемными винтами 1 и прижимной пластиной Цилиндрический уровень 7, расположенный в корпусе слева
от зрительной трубы, служит для точного приведения визирной оси прибора в горизонтальное положение. Для грубого приведения вертикальной оси прибора в отвесное положение служит круглый уровень 3. Пузырек круглого уровня приводится в нулевое положение подъемными винтами 1 подставки 2. Зрительную трубу 6 наводят на рейку винтами 1 подставки 2. Зрительную трубу 6 наводят на рейку по визиру 8 винтом 11 при закрепленном винте 9. Резкость изображения нивелирной рейки достигается вращением винта 5 фокусирующей линзы.
1. Ось UU цилиндрического уровня горизонтального круга должна
быть перпендикулярна оси Wвращения прибора
2. Визирная ось РР трубы должна быть перпендикулярна оси НИ
3. Ось НН вращения трубы должна быть перпендикулярна оси W
4. Вертикальная нить АА сетки зрительной трубы должна быть
перпендикулярна оси НН ее вращени
5. Компенсатор вертикального круга должен обеспечивать неиз-
менный отсчет по вертикальному кругу при наклонах вертикальной
оси теодолита в пределах ±2,0′ (для теодолитов ЗТ5К).
6.Визирная ось КК’К» оптического отвеса должна совпадать с
осью К’К»вращения теодолита, т.е. W
Отсчетные устройства: штриховой и шкаловой микроскопы. Эксцентриситет горизонтального круга.
С помощью отсчетных устройств в теодолитах считывают показания с лимбов. В современных точных и технических теодолитах применяются штриховые микроскопы (отсчет по штриху-индексу) и шкаловые микроскопы (отсчет по шкале), а высокоточных теодолитах используют микрометры.
Отсчетный микроскоп через систему призм и линз выводит в окуляр изображения градусных делений горизонтального и вертикального кругов. На рис.23а показано поле зрение штрихового микроскопа с изображением штриха и лимбов с ценой деления в 10′: вертикального В и горизонтального Г. Визуально оценивая десятые доли делений лимбов с точностью до 1′, отсчеты на рисунке В=7° 45′ и Г=345° 54′.
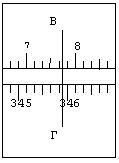
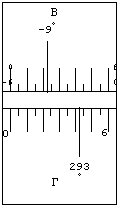
Рис.23.Поле зрения штрихового (а) и шкалового (б) микроскопов
В поле зрения шкалового микроскопа теодолита 2Т30 (рис.23б) цена деления лимба составляет 1 , отсчетная шкала разделена через 5′, отсчеты на рисунке В = -9° 37′, Г = 293° 42′.
В теодолитах со штриховыми и шкаловыми микроскопами отсчеты производят по одному концу диаметра лимба. Для уменьшения влияния эксцентриситета горизонтального круга (рис.23.2)- несовпадения оси вращения прибора С’ с центром кольца делений лимба C — измерение горизонтального угла производят дважды: при круге лево (отсчет М’) и при круге право (отсчет N’).
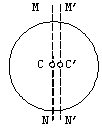
Рис.23.2 Схема влияния эксцентриситета
Так как при этом отсчеты берутся по диаметрально противоположным концам лимба, то среднее из полученных результатов не содержит погрешности от влияния эксцетриситета (M+N)/2 =(M’+N’)/2.
Зрительная труба предназначена для высокоточного наведения на удаленные предметы и точки (визирные цели) при работе с теодолитом. Состоит из следующих основных частей: объектива, окуляра, фокусирующей линзы, сетки нитей, кремальеры (винта, перемещающего фокусирующую линзу внутри трубы). В зрительной трубе различают две оси: визирную и оптическую. Прямая соединяющая оптический центр объектива с центром сетки нитей называется визирной осью. Прямая соединяющая оптический центр объектива и окуляр — оптической осью трубы.
Подготовка зрительной трубы для наблюдений выполняется в следующей последовательности:
а) установка зрительной трубы «по глазу» — вращением окуляра (от –5 до +5 диоптрий) до получения четкого изображения сетки нитей;
б) установка зрительной трубы по предмету (визирной цели) — вращением кремальеры до четкого изображения визирной цели;
в) устранение параллакса, возникающего в тех случаях, когда изображение предмета не совпадает с плоскостью сетки нитей и при перемещении глаза относительно окуляра точка пересечения нитей будет проецироваться на различные точки наблюдаемого предмета. Параллакс сетки нитей устраняется небольшим поворотом кремальеры.
Зрительные трубы в геодезических приборах характеризуются увеличением, полем зрения и точностью визирования. Под увеличением u b понимают отношение угла a, под которым предмет виден в трубу, к углу b, под которым этот же предмет виден невооруженным глазом рис.21:
Полем зрения называется пространство, видимое в трубу при неподвижном ее положении. Его определяют углом зрения f по формуле
где u — увеличение трубы.
Точность визирования выражается средней квадратической погрешностью
где 60″ — средняя погрешность визирования невооруженным глазом (разрешающая способность глаза человека — предельно малый угол, при котором две точки еще воспринимаются раздельно).
При стереофотограмметрическом способе фотографирование
объекта производят в циклах с двух точек базиса известной длины, в результате чего получают стереопару. Для вычисления деформаций измеряют по снимкам координаты точек базиса и горизонтальные параллаксы.
Тахеометрическая съемка, используемые приборы и формулы.
Сущность тахеометрической съемки заключается в том, что плановое положение характерных (реечных) точек местности определяется полярным способом от линии теодолитного хода, а их высотное положение определяется одним из двух методов: геометрическим или тригонометрическим нивелированием. Расстояние от прибора до реек зависит от масштаба составляемого топоплана и для масштаба 1:1000 — допускается до 150 м, а между соседними реечными точками менее 35 м.
Результаты съемки наносятся на план при помощи транспортира с погрешностью превышающей 8 минут, а полярные расстояния до реечных точек определяются на местности по нитяному дальномеру со средней относительной погрешностью DD/D = 1/200. Для сравнения отметим, что относительные погрешности измерений расстояний землемерной лентой или 20-метровой рулеткой составляют порядка 1/2000, шагами — 1/20. При определении расстояний одну из дальномерных нитей совмещают с началом дециметрового деления на рейке (обычно с 1000 мм), а по второй дальномерной нити берут отсчет. Разность отсчетов на рейке по верхней и нижней дальномерным нитям умноженная на коэффициент дальномера, равный 100, и будет соответствовать расстоянию от прибора до рейки.
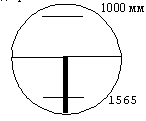

Определение расстояния по нитяному дальномеру
При тахеометрической съемке высоты реечных точек в зависимости от условий местности получают при горизонтальном визировании (геометрическое нивелирование способом «вперед») или наклоном (тригонометрическое нивелирование). Используемые при этом формулы могут быть получены из рис. 41.2.
При геометрическом нивелировании способом «вперед» сначала определяют горизонт прибора ГП = Нст+I. Затем устанавливают на вертикальном круге теодолита отсчет равный МО. Высоты реечных точек вычисляют по формуле
где аi — отсчеты по рейке при горизонтальном визировании.
При тригонометрическом нивелировании реечных точек при КЛ наводят среднюю нить сетки на отсчет Vj (для упрощения последующих вычислений по возможности отсчет Vj должен быть равен высоте
прибора I), снимают отсчет Л по ВК и вычисляют угол наклона
Наклонное расстояние D от прибора до реечной точки определяют по штриховому (нитяному) дальномеру. Так как вертикально (отвесно) установленная рейка не перпендикулярна визирному лучу на величину угла наклона n, то
где D’ — расстояние, определяемое по штриховому дальномеру и отвесно установленной рейке.
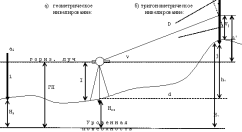
Тогда из прямоугольного треугольника (рис.41.2), у которого определены D и n, так называемое «неполное» превышение
h’= D sinn = D’ cosn sinn = (1/2)D’ sin2n
h’= d tgn = D’ cos 2 n sinn/cosn = (1/2)D’sin2n.
На равнинной местности при углах наклона n
Источник



