
Пуск, реверсирование и торможение двигателей постоянного тока
 Пуск двигателя постоянного тока прямым включением его на напряжение сети допустим только для двигателей небольшой мощности. При этом пик тока в начале пуска может быть порядка 4 — 6-кратного номинального. Прямой пуск двигателей постоянного тока значительной мощности совершенно недопустим, потому что начальный пик тока здесь будет равен 15 — 50-кратному номинальному. Поэтому пуск двигателей средних и больших мощностей производят при помощи пускового реостата, который ограничивает ток при пуске до допустимых по коммутации и механической прочности значений.
Пуск двигателя постоянного тока прямым включением его на напряжение сети допустим только для двигателей небольшой мощности. При этом пик тока в начале пуска может быть порядка 4 — 6-кратного номинального. Прямой пуск двигателей постоянного тока значительной мощности совершенно недопустим, потому что начальный пик тока здесь будет равен 15 — 50-кратному номинальному. Поэтому пуск двигателей средних и больших мощностей производят при помощи пускового реостата, который ограничивает ток при пуске до допустимых по коммутации и механической прочности значений.
Пусковой реостат выполняется из провода или ленты с высоким удельным сопротивлением, разделенных на секции. Провода присоединяются к медным кнопочным или плоским контактам в местах перехода от одной секции к другой. По контактам перемещается медная щетка поворотного рычага реостата. Реостаты могут иметь и другое выполнение. Ток возбуждения при пуске двигателя с параллельным возбуждением устанавливается соответствующим нормальной работе, цепь возбуждения включается прямо на напряжение сети, чтобы не было уменьшения напряжения, обусловленного падением напряжения в реостате (см. рис. 1).
Необходимость иметь нормальный ток возбуждения связана с тем, что при пуске двигатель должен развивать возможно больший допустимый момент Мэм, необходимый для обеспечения быстрого разгона. Пуск двигателя постоянного тока производится при последовательном уменьшении сопротивления реостата, обычно — путем перевода рычага реостата с одного неподвижного контакта реостата на другой и выключения секций; уменьшение сопротивления может производиться и путем замыкания накоротко секций контакторами, срабатывающими по заданной программе.
При пуске вручную или автоматически ток изменяется от максимального значения, равного 1,8 —2,5-кратному номинальному в начале работы при данном сопротивлении реостата, до минимального значения, равного 1,1 — 1,5-кратному номинальному в конце работы и перед переключением на другое положение пускового реостата. Ток якоря после включения двигателя при сопротивлении реостата rп составляет
где Uс — напряжение сети.
После включения начинается разгон двигателя, при этом возникает противо-ЭДС Е и уменьшается ток якоря. Если учесть, что механические характеристики n = f1(M н) и n = f2 (I я ) практически линейны, то при разгоне увеличение скорости вращения будет происходить по линейному закону в зависимости от тока якоря (рис. 1).
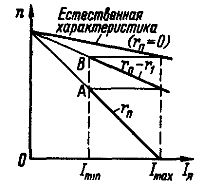
Рис. 1. Диаграмма пуска двигателя постоянного тока
Пусковая диаграмма (рис. 1) для различных сопротивлений в цепи якоря представляет собой отрезки линейных механических характеристик. При уменьшении тока якоря IЯ до значения Imin выключается секция реостата с сопротивлением r1 и ток возрастает до значения
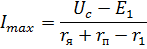
где E1 — ЭДС в точке А характеристики; r1—сопротивление выключаемой секции.
Затем снова происходит разгон двигателя до точки В, и так далее вплоть до выхода на естественную характеристику, когда двигатель будет включен прямо на напряжение Uc. Пусковые реостаты рассчитаны по нагреву на 4 —6 пусков подряд, поэтому нужно следить, чтобы в конце пуска пусковой реостат был полностью выведен.
При остановке двигатель отключается от источника энергии, а пусковой реостат полностью включается — двигатель готов к следующему пуску. Для устранения возможности появления больших ЭДС самоиндукции при разрыве цепи возбуждения и при ее отключении цепь может замыкаться на разрядное сопротивление.
В регулируемых приводах пуск двигателей постоянного тока производится путем постепенного повышения напряжения источника питания так, чтобы ток при пуске поддерживался в требуемых пределах или сохранялся в течение большей части времени пуска примерно неизменным. Последнее можно осуществить путем автоматического управления процессом изменения напряжения источника питания в системах с обратными связями.
Пуск двигателей постоянного тока с последовательным возбуждением производится также при помощи пусковых устройств. Пусковая диаграмма представляет собой отрезки нелинейной механической характеристики для различных сопротивлений цепи якоря. Пуск при относительно небольших мощностях может выполняться вручную, а при больших — путем замыкания накоротко секций пускового реостата контакторами, которые срабатывают при управлении вручную или автоматически.
Реверсирование — изменение направления вращения двигателя — производится путем изменения направления действия вращающего момента. Для этого требуется изменить направление магнитного потока двигателя постоянного тока, т. е. переключить обмотку возбуждения или якорь, при этом в якоре будет протекать ток другого направления. При переключении и цепи возбуждения, и якоря направление вращения останется прежним.
Обмотка возбуждения двигателя параллельного возбуждения имеет значительный запас энергии: постоянная времени обмотки составляет секунды для двигателей больших мощностей. Значительно меньше постоянная времени обмотки якоря. Поэтому для того чтобы реверсирование проходило возможно быстрее, производится переключение якоря. Только там, где не требуется быстродействия, можно выполнять реверсирование путем переключения цепи возбуждения.
Реверсирование двигателей последовательного возбуждения можно производить переключением или обмотки возбуждения, или обмотки якоря, так как запасы энергии в обмотках возбуждения и якоря невелики и их постоянные времени относительно малы.
При реверсировании двигателя с параллельным возбуждением якорь сперва отключается от источника питания и двигатель механически тормозится или переключается для торможения. После окончания торможения якорь переключается, если он не был переключен в процессе торможения, и выполняется пуск при другом направлении вращения.
В такой же последовательности производится и реверсирование двигателя последовательного возбуждения: отключение — торможение — переключение — пуск в другом направлении. У двигателей со смешанным возбуждением при реверсировании следует переключить якорь либо последовательную обмотку вместе с параллельной.
Торможение необходимо для того, чтобы уменьшить время выбега двигателей, которое при отсутствии торможения может быть недопустимо велико, а также для фиксации приводимых механизмов в определенном положении. Механическое торможение двигателей постоянного тока обычно производится при наложении тормозных колодок на тормозной шкив. Недостатком механических тормозов является то, что тормозной момент и время торможения зависят от случайных факторов: попадания масла или влаги на тормозной шкив и других. Поэтому такое торможение применяется, когда не ограничены время и тормозной путь.
В ряде случаев после предварительного электрического торможения при малой скорости можно достаточно точно произвести остановку механизма (например, подъемника) в заданном положении и зафиксировать его положение в определенном месте. Такое торможение применяется и в аварийных случаях.
Электрическое торможение обеспечивает достаточно точное получение требуемого тормозящего момента, но не может обеспечить фиксацию механизма в заданном месте. Поэтому электрическое торможение при необходимости дополняется механическим, которое входит в действие после окончания электрического.
Электрическое торможение происходит, когда ток протекает согласно с ЭДС двигателя. Возможны три способа торможения.
Торможение двигателей постоянного тока с возвратом энергии в сеть. При этом ЭДС Е должна быть больше напряжения источника питания UС и ток будет протекать в направлении ЭДС, являясь током генераторного режима. Запасенная кинетическая энергия будет преобразовываться в электрическую и частично возвращаться в сеть. Схема включения показана на рис. 2, а.
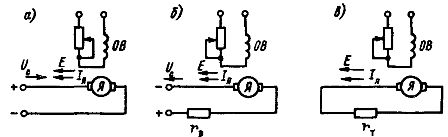
Рис. 2. Схемы электрического торможения двигателей постоянного тока: я — с возвратом энергии в сеть; б — при противовключении; в — динамическое торможение
Торможение двигателя постоянного тока может быть выполнено, когда уменьшается напряжение источника питания так, что Uc
Торможение при противовключении выполняется путем переключения вращающегося двигателя на обратное направление вращения. При этом ЭДС Е и напряжение Uc в якоре складываются, и для ограничения тока I следует включать резистор с начальным сопротивлением

где Imах — наибольший допустимый ток.
Торможение связано с большими потерями энергии.
Динамическое торможение двигателей постоянного тока выполняется при включении на зажимы вращающегося возбужденного двигателя резистора rт (рис. 2, в). Запасенная кинетическая энергия преобразуется в электрическую и рассеивается в цепи якоря как тепловая. Это наиболее распространенный способ торможения.

Схемы включения двигателя постоянного тока параллельного (независимого) возбуждения: а — схема включения двигателя, б — схема включения при динамическом торможении, в — схема для противовключения.
Если Вам понравилась эта статья, поделитесь ссылкой на неё в социальных сетях. Это сильно поможет развитию нашего сайта!
Подписывайтесь на наш канал в Telegram!
Просто пройдите по ссылке и подключитесь к каналу.
Не пропустите обновления, подпишитесь на наши соцсети:
Источник
Способы пуска и реверса ДПТ
Двигатели постоянного тока запускаются с ограничением тока якоря до значений не более 2,5  , для этого в нерегулируемых проводах последовательно с якорем включается пусковой (добавочный) резистор Rдоб, который после запуска шунтируется контактором КМ автоматически, в функции тока, ЭДС якоря или времени (рисунок 3.8). Величина сопротивления этого резистора определяется из формулы (3.4). Для принятых условий:
, для этого в нерегулируемых проводах последовательно с якорем включается пусковой (добавочный) резистор Rдоб, который после запуска шунтируется контактором КМ автоматически, в функции тока, ЭДС якоря или времени (рисунок 3.8). Величина сопротивления этого резистора определяется из формулы (3.4). Для принятых условий:
 .
. 

Рисунок 3.8. К вопросу о пуске ДПТ с добавочным резистором.
Диаграмма пуска имеет вид рисунка 3.9. Электродвигатель разгоняется по искусственной механической характеристики из точки «а» в точку «б». При скорости ωпершунтируется добавочный резистор контактом, от чего двигатель переходит на естественную характеристику в точку «б» и далее разгоняется до точки «г». В этой точке его механическая характеристика пересекается с механической характеристикой рабочей машины (Мс) и процесс разбега заканчивается.

Рисунок 3.9. Пусковая диаграмма ДПТ параллельного возбуждения с одним добавочным резистором.
При значительном моменте Мс одним добавочным резистором не обеспечивается условие  . Приходится использовать 3 или 4 добавочных резистора. В этом случае токовая диаграмма имеет 3 или 4 ступени пуска.
. Приходится использовать 3 или 4 добавочных резистора. В этом случае токовая диаграмма имеет 3 или 4 ступени пуска.
В современных приводах в ДПТ, получают питание от преобразователей,
основной способ пуска постепенное повышение напряжения на якоре. Это обеспечивает плавный пуск с ограничением тока якоря.
Реверс ДПТ можно производить, изменяя направление тока в обмотке якоря или в обмотке возбуждения. Обычно изменяют направление тока в обмотке якоря, потому что она имеет меньшую индуктивность и возникает меньшая дуга на контактах при переключении.
Для простых приводов, без преобразователей, типовая схема реверса изображена на рисунке 3.10. В период реверса в якорь включается добавочный резистор Rдоб для ограничения тока якоря до значения  .
.
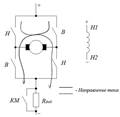
Рисунок 3.10. Типовая схема реверса ДПТ в нерегулируемых проводах: В – контакты контактора «вперед»; Н – контакты контакторов «назад».
В регулируемых приводах с ДПТ, имеющих преобразователи, часть используется вторая группа вентилей, включение которой вызывает изменение направления тока в якоре и реверс электродвигателя. Обычно такое решение применяют при работе электропривода с частыми реверсами. Принципиальная схема реверса ДПТ с двумя группами вентилей UZ1 и UZ2 изображена на рисунке 3.11. При реверсе контролирует ток якоря путем изменения напряжений на его зажимах.

Рисунок 3.11. Принципиальная схема регулируемого электропривода с ДПТ для режимов частых реверсов.
8 Характеристики генератора параллельного возбуждения
Характеристика холостого хода U0=f (Iв) при I=0 и n=const. В процессе самовозбуждения в генераторах параллельного возбуждения Ia=Iв, причем Iв=(0,02…0,03) Iн. Поэтому можно пренебречь реакцией якоря и падением напряжения в обмотке якоря и считать, что между характеристиками холостого хода генератора параллельного возбуждения и независимого возбуждения практически нет разницы. Следует учесть, что эта характеристика может быть снята только в одном квадранте, так как процесс самовозбуждения в данном генераторе может протекать только в одном направлении при согласном действии остаточного магнитного потока и потока, создаваемого током возбуждения, причем на прямолинейном участке характеристики напряжение генератора не удается регулировать как у генератора независимого возбуждения, что определяет меньший диапазон регулирования его напряжения.
Нагрузочная характеристика U=f (Iв) при I=const и n=const. Нагрузочные характеристики генератора параллельного возбуждения практически совпадают с характеристиками генератора независимого возбуждения, так как увеличение тока Iа на величину тока возбуждения при параллельном возбуждении не может оказать заметного влияния на напряжение генератора.
Внешняя характеристика U=f (I) при rв=const и n=const (рисунок 1) показывает влияние изменения нагрузки на напряжение генератора. При этом ток возбуждения не регулируется с помощью регулировочного реостата. Следует учесть, что при независимом возбуждении

а при параллельном возбуждении

Последнее равенство означает, что при снятии внешней характеристики ток возбуждения генератора изменяется пропорционально напряжению на генераторе. Таким образом, уменьшение напряжения генератора параллельного возбуждения при увеличении его нагрузки вызывается не только размагничивающим действием реакции якоря и падением напряжения в цепи якоря, но и уменьшением тока возбуждения. Поэтому внешняя характеристика генератора параллельного возбуждения (рисунок 1 ) (кривая 1) располагается ниже внешней характеристики генератора независимого возбуждения (кривая 2).

В генераторе параллельного возведения ток нагрузки I будет увеличиваться только до определенного критического значения Iкр=(2. 2,5) Iн, после чего он начнет уменьшаться до Iко 
Регулировочная характеристика Iв=f (I) при n=const и U=const снимается так же как и для генератора независимого возбуждения и практически получается такой же, как и при независимом возбуждении, т.к. ток возбуждения очень мал и падение напряжения Iвraв цепи якоря от тока возбуждения также очень мало и не оказывает заметного влияния на напряжение генератора.
Характеристика короткого замыкания Iк=f (Iв) при n=const и U=0 может быть снята только при питании обмотки возбуждения от постороннего источника, т.к. при самовозбуждении при U=0 ток возбуждения Iв=0
8 уравнения генератора постоянного тока
Любая электрическая машина обладает свойством обратимости, т.е. может работать в режиме генератора или двигателя. Если к зажимам приведенного во вращение якоря генератора присоединить сопротивление нагрузки, то под действием ЭДС якорной обмотки в цепи возникает ток

где U — напряжение на зажимах генератора;
Rя — сопротивление обмотки якоря.
 (2)
(2)
Уравнение (2) называется основным уравнением генератора. С появлением тока в проводниках обмотки возникнут электромагнитные силы.
На рис. 5 схематично изображен генератор постоянного тока, показаны направления токов в проводниках якорной обмотки.
 Воспользовавшись правилом левой руки, видим, что электромагнитные силы создают электромагнитный момент Мэм, препятствующий вращению якоря генератора.
Воспользовавшись правилом левой руки, видим, что электромагнитные силы создают электромагнитный момент Мэм, препятствующий вращению якоря генератора.
Чтобы машина работала в качестве генератора, необходимо первичным двигателем вращать ее якорь, преодолевая тормозной электромагнитный момент, возникающий по правилу Ленца.
Нам важно ваше мнение! Был ли полезен опубликованный материал? Да | Нет
Источник



