
Обратная угловая засечка в геодезических измерениях
Засечкой называют относительно простой метод вычисления координат некоторой точки посредством измерения на ней углов и расстояний по направлению на уже закрепленные на местности контуры.
К ней достаточно часто прибегают в различных геологических, строительных и инженерных работах за счет ее простоты и экономичности. На практике обратная засечка чаще всего используются для вычисления координат пунктов геодезической сети, выноса в натуру проектных точек и т.д.
Опытный геодезист сможет без труда провести нужные измерения при помощи теодолита, тахеометра или любого другого прибора всего за пару минут.
Виды засечек
В зависимости от местности и способов построения сетей сгущения в геодезии существует два основных вида привязки к опорным пунктам:
- Непосредственная. Подразумевает привязку теодолитного или полигонометрического хода к триангуляционным пунктам высшего класса с возможностью выполнить измерения примычных углов. Используется в тех случаях, когда на опорных точках можно выполнить те же измерения, что и на соседних.
- Косвенная. Проводится только при отсутствии возможности провести непосредственные измерения примычных длин и углов. К этому виду привязки и относится засечка.

По способу же построения геодезическая засечка бывает:
- линейной (полярные и биполярные по числу пунктов);
- угловой (прямая и обратная);
- комбинированной (положение точки определяют по известным углам и линейным расстояниям).
В геодезии чаще всего прибегают к комбинированию прямой и обратной засечек. Кроме того, чтобы полученные результаты были наиболее достоверными, измеряют больше величин, чем нужно, а само местоположение искомых пунктов получают посредством уравнивания.
Однократная и многократная засечка
Если для определения координат берется только один исходный пункт, то такая засечка будет называться однократной, а если более трех – многократной.
В основе обратной однократной угловой засечки лежит так называемая задача Потенота, которая была названа в честь французского математика Лорана Потенота, удачно решившего ее еще в 1692 году. Ученый предложил по известным значениям трех близлежащих точек вычислять координаты искомой.
На сегодняшний день существует уже более ста вариаций ее решения, которые были предложены многими именитыми учеными, но в геодезической практике наибольшую популярность получили формулы Жана Деламбра, Кнейссля и Гаусса.

Рисунок 1. Обратная многократная засечка
Важно отметить, что достоверные данные удается получить только в тех случаях, когда искомая точка находится в пределах треугольника, который образовали исходные пункты или же вне его, но напротив одной из его вершин.
Если же искомая точка попадает в пределы окружности, проходящей через эти точки, она становится неопределяемой. Этот ключевой недостаток в задаче Потенота, именуемый опасным кругом, приводит к необходимости определения дополнительной точки.
Обратная многократная угловая засечка как раз и подразумевает определение местоположения пункта через измерения на этом самом пункте углов или направлений как минимум на четыре твердых пункта, чьи координаты установлены. Этот метод более трудоемкий, но гарантирует надежный контроль результатов измерений. При обработке данных используют метод Гаусса-Ньютона, который в геодезии также называют параметрическим.
Способ Деламбра
Решение обратной засечки при помощи этого способа выполняется в такой последовательности:
- Вычисляется дирекционный угол исходного направления с отметки 1 на точку «0» по формуле обратной геодезической засечки:
Значения дирекционных углов с исходных отметок Т2, Т3, Т4 получают из формул:

Способ Кнейссля
Аналогично способу Деламбра последовательность формул при решении задачи обратной геодезической засечки по Кнейсслю будет иметь следующий вид:
- Определяются вспомогательные коэффициенты:
Вычисляется котангенс дирекционного угла исходного направления на заданный пункт:
Приращения координаты точки Р относительно исходного пункта 1 находят при помощи нижеприведенных формул:
\(\Delta x_<1-p>=c\cdot \Delta y_<1-p>\)
Определяются координаты точки Р:
\(y_
=y_<1>+\Delta y_<1-p>\) 
Средняя квадратическая погрешность вычисления местоположения пункта Р по трем направлениям вычисляется при помощи выражения:
Оценивается точность обратной угловой засечки по способу Кнейссля с определением погрешности:
Допустимость в расхождениях полученных значений двух вариантов решений выполняется по формуле:
Если данное условие соблюдено, то итоговое значение координат берется как среднее арифметическое значение из результатов двух решений.
Уравнивание при помощи параметрического способа
Под определение обратной многократной угловой засечки попадает как совокупность простых однократных измерений, так и просто большое количество избыточных. Однако в обоих случаях необходимо уравнивание, которое выполняется по измеренным углам и направлениям.
К примеру, неизвестные \(x_
\) и \(y_
\) – координаты точки Р, которые в данном способе будут представлены в качестве параметров. Для этого их представляют в виде приближенных значений \(x_<0>\), \(y_<0>\) и поправок к ним \(δх\) и \(δу\).
В приведенном уравнении \(x_<0>\) и \(y_<0>\) – результаты обработки однократных засечек, а \(δх\) и \(δу\) получают через уравнивание методом наименьших квадратов параметрическим способом с применением дифференциальных формул.

Этот метод подразумевает применение не только параметрического, но и коррелатного способа. Они дают одинаковые результаты, но отличаются по объему вычислений.
Однако в геодезической практике целесообразнее применять параметрический способ, поскольку при любом количестве избыточных измерений число нормальных уравнений будет аналогично числу неизвестных. При этом каждое неизвестное будет представлено в виде суммы приближенного значения и его поправки.
Сферы применения
Обратная угловая засечка нашла широкое применение в строительстве высотных зданий и сооружений, вроде опорных конструкций для мостов и дымовых труб. Кроем того, она позволяет быстро построить строительную сетку или определить местоположение точки в пространстве. В геодезии ее нередко используют в трилатерации и триангуляции.
Нельзя также не упомянуть ее огромного практического значения в навигации и военном деле. В частности, засечка по обратным дирекционным углам используется для топографогеодезической подготовки командно-наблюдательного пункта и позиции ведения огня.
Источник
Обратная засечка (формулы Кнейссля)
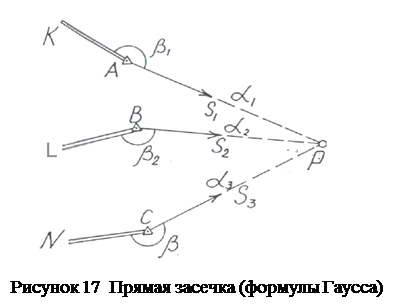
Прямая засечка (формулы Гаусса)
Если при решении задачи окажется, что видимости между исходными пунктами нет, то применяют формулы Гаусса. Для этого на пунктах А и В измеряют соответственно углы b1 и b2, а для контроля правильности определения координат пункта Р измеряют угол b3 на пункте С (рисунок 17).
Измеренные углы: b1; b2; b3.
Порядок решения задачи:
 1. Вычисляют дирекционные углы a1, a2, и a3
1. Вычисляют дирекционные углы a1, a2, и a3
Два дирекционных угла необходимы для решения задачи, третий – для контроля и повышения точности.
2. Формулы Гаусса выводятся из известного соотношения
tg a1 =  (87)
(87)
Эти два равенства представляют систему двух уравнений с двумя неизвестными ХР и YP. Вычтем из уравнения (88) уравнение (89), получим
XP = 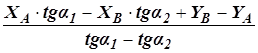 (90)
(90)
 Значение ординаты вычисляют в этом случае по формулам:
Значение ординаты вычисляют в этом случае по формулам:
Формулы Гаусса (90) и (91) служат для непосредственного вычисления значений координат пункта Р.
3. Вычтем из обеих частей равенства (90) XA и приведя правую часть к общему знаменателю, будем иметь
XP – ХА = 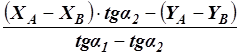 (92)
(92)
Подобно этому найдем
XP – ХВ = 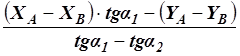 (93)
(93)
Полученные два равенства вместе с равенствами (88) и (89) представляют собой формулы Гаусса для приращения координат. Вычислив их, координаты пункта Р определяют дважды:
 XP = ХА + (ХР – ХА) = ХВ + (ХР – ХВ)
XP = ХА + (ХР – ХА) = ХВ + (ХР – ХВ)
4. Используя координаты другой пары данных пунктов В и С и соответствующие им дирекционные углы a2 и a3, второй раз вычисляют координаты пункта Р.
Например, формулы Гаусса для непосредственных вычислений значений координат пункта Р по второй паре
XP =  (95)
(95)
Значение ординаты вычисляют в этом случае по формулам:
 YP = YВ + (XP – XВ) tg a2 или (96)
YP = YВ + (XP – XВ) tg a2 или (96)
5. Оценка точности. Допустимость расхождения между значениями координат, полученными при двух решениях задачи, может быть определена по тем же формулам, что и при решении задачи по формулам Юнга.
Привязку ходов можно осуществить, решив задачу по нахождению координат пункта Р по трем исходным А, В, С (рисунок 18), расположенным на значительном расстоянии от определяемого.
 Для контроля измерений производят наблюдения на пункт D. Таким образом, для решения задачи с контролем необходимо с определяемого пункта Р видеть четыре исходных пункта и измерить при определяемой точке три угла. Наиболее просто эта задача решается с использованием формул Кнейссля.
Для контроля измерений производят наблюдения на пункт D. Таким образом, для решения задачи с контролем необходимо с определяемого пункта Р видеть четыре исходных пункта и измерить при определяемой точке три угла. Наиболее просто эта задача решается с использованием формул Кнейссля.
Исходные данные: ХА, YA; XB, YB; XC, YC, XD, YD.
Измеренные углы: g1; g2; g3.
Порядок решения задачи:
ctgg1 = a; ctgg2 = b.
Из рисунка 18 видно, что a2 = a1 + g1
Поэтому можно написать:
tg a2 = tg (a1 + g1) =  (97)
(97)
2. Для сокращения записей при дальнейшем выводе перенесем начало координат в точку А. Тогда в новой системе координат будет:
3. Известно, что tg aВР =  (98)
(98)
а tg g1 =  . Тогда имеем
. Тогда имеем
=  (99)
(99)
Так как Х¢А = 0 и Y¢A = 0, то получим
=  ,
,
Раскрыв скобки и заново сгруппировав члены, будем иметь
 (a×Y¢В — X¢В)× X¢P — (a×X¢В + Y¢В)× Y¢P = -( Х¢) 2 –( Y¢) 2
(a×Y¢В — X¢В)× X¢P — (a×X¢В + Y¢В)× Y¢P = -( Х¢) 2 –( Y¢) 2
Обозначив коэффициенты при Х¢ и Y¢ в первом из двух равенств через К1 и К2, а во втором – через К3 и К4, будем иметь систему двух уравнений с двумя неизвестными.
I К1 × X¢P — К2 × Y¢P = — Х¢ 2 — Y¢ 2
Вычтем из первого уравнения второе, получим
(К1 – К3) × X¢P -(К2 – К4) × Y¢P = 0, откуда следует, что 
4. Обозначим  (102)
(102)
тогда  или X¢P = С × Y¢P (103)
или X¢P = С × Y¢P (103)
Подставив это выражение в уравнения I и II, получим
Y¢P =  (104)
(104)
5. Определив Y¢P, находят X¢P, подставив это значение в уравнение
7. сtg aРД =  ; контроль aРД — aРА = g3 выч (106)
; контроль aРД — aРА = g3 выч (106)
Графическая оценка точности по формулам Г.Е. Сомова определения положения пункта Р, полученного из решения обратной засечки, производится в следующей последовательности.
По известным и полученным координатам наносят пункты А, В, С, D и Р в таком масштабе, чтобы не было направлений меньше 5 — 6 см. Измеряют расстояния от пункта Р до исходных пунктов S1, S2, S3 и S4. Вычисляют градиенты направлений по формуле qi =  ; r² = 206265. В принятом масштабе градиенты откладывают от пункта Р по соответствующим направлениям, соединяют концы градиентов и получают два инверсионных треугольника DА1В1С1 и DВ1С1Д1 (рисунок 21). Из вершин А1 и С1 первого инверсионного треугольника проводят высоты h1 и h3 на противоположные стороны и измеряют их. Из вершин В1 и Д1 второго инверсионного треугольника аналогично находят h2 и h4.
; r² = 206265. В принятом масштабе градиенты откладывают от пункта Р по соответствующим направлениям, соединяют концы градиентов и получают два инверсионных треугольника DА1В1С1 и DВ1С1Д1 (рисунок 21). Из вершин А1 и С1 первого инверсионного треугольника проводят высоты h1 и h3 на противоположные стороны и измеряют их. Из вершин В1 и Д1 второго инверсионного треугольника аналогично находят h2 и h4.
Для графической оценки точности по формулам Г. Е. Сомова определяют средние квадратические погрешности положения пункта Р, полученного соответственно при первом и втором решениях:
M1 =  ; (107)
; (107)
M2 =  ; (108)
; (108)
M =  ; (109)
; (109)
где mb — средняя квадратическая погрешность измерения углов.
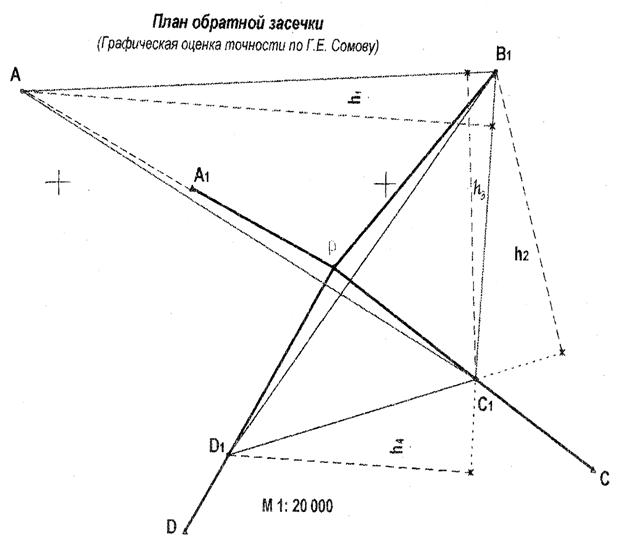
Рисунок 19 Графическая оценка точности по Г.Е. Сомову

1. Необходимые исходные данные для определения координат дополнительного пункта прямой засечкой по формулам Юнга.
2. В какой последовательности решается прямая засечка по формулам Гаусса?
3. Последовательность решения обратной засечки по формулам Кнейссля.
4. Каким образом производят определение графической оценки точности по формулам Г.Е. Сомова?
5. Напишите формулу для определения градиентов направлений.
7 УРАВНИВАНИЕ СЪЁМОЧНЫХ ГЕОДЕЗИЧЕСКИХ СЕТЕЙ
7.1 Построение съёмочных ходов.
7.2 Уравнивание системы нивелирных ходов с одной узловой точкой
7.3 Уравнивание системы теодолитных ходов с одной узловой точкой
7.1 Построение съёмочных ходов
Съёмочные геодезические сети строят, опираясь на пункты государственной геодезической сети или сетей микротриангуляции, сетей четырехугольников без диагоналей, проложением теодолитных и мензульных ходов, различного вида засечками.
Если съёмочная сеть является самостоятельной, то не менее пятой части её пунктов закрепляют постоянными геодезическими знаками по типу грунтового или стенного полигонометрического репера. Обязательному закреплению в данном случае подлежат пункты, на которые переданы координаты, или дирекционные углы с пунктов геодезической сети высшего класса. На все пункты съёмочной геодезической сети передают высоты геометрическим или тригонометрическим нивелированием.
В камеральных вычислениях опорных геодезических сетей большое место занимает уравнивание, т.е. распределение невязок в целях получения лучших результатов и выполнения геометрических условий. При построении съёмочной сети нередко бывают случаи, когда между несколькими исходными пунктами прокладывают ходы таким образом, что все они пересекаются в одной точке, которая в таком случае называется узловой.
Нам важно ваше мнение! Был ли полезен опубликованный материал? Да | Нет
Источник



