
Реостатное регулирование асинхронного двигателя с фазным ротором. Оценка способа, характеристики.




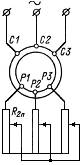
Рис. 4.10. Асинхронный двигатель с фазным ротором (а), схема (б) и характеристики (в) и (г) реостатного регулирования
К щеткам на кольцах в цепи ротора можно подключать как пассивные цепи, например, резисторы, так и активные, содержащие источники энергии; последняя возможность широко используется в электроприводах большой мощности (сотни — тысячи киловатт).
Реостатное регулирование.
Как и в электроприводе постоянного тока это простейший способ регулирования: в каждую фазу ротора включают одинаковые резисторы с сопротивлением Rд — рис. 4.10,б. Тогда общее активное сопротивление фазы ротора составит R2 = Rр + Rд, а искусственные характеристики приобретут вид, представленный на рис. 4.10,в,г: предельное значение тока ротора I¢2 пред и критический момент Мк в соответствии с (4.8) и (4.11) не изменяется, а sк в соответствии с (4.12) растет пропорционально R2:
 . (4.18)
. (4.18)
Последнее соотношение для критического скольжения, очевидно, выполняется и для скольжения при любом М = const, оно похоже на (3.16), а реостатные механические характеристики похожи на таковые для двигателя постоянного тока. Показатели реостатного регулирования скорости асинхронных двигателей с фазным ротором практически те же, что у электропривода постоянного тока.
1. Регулирование однозонное — вниз от основной скорости.
2. Диапазон регулирования (2-3):1, стабильность скорости низкая.
3. Регулирование ступенчатое. С целью устранения этого недостатка иногда используются схемы, в которых роторный ток выпрямляется и сглаживается реактором, а резистор, включаемый за выпрямителем, шунтируется управляемым ключом — транзистором с управляемой скважностью, благодаря чему достигается плавность регулирования, а при использовании обратных связей формируются жесткие характеристики.
4. Допустимая нагрузка Мдоп = Мн, поскольку Ф » Фн и при мало меняющемся cos j2 I2доп » I2н .
5. С энергетической точки зрения реостатное регулирование в асинхронном электроприводе столь же неэффективно, как и в электроприводе постоянного тока — потери в роторной цепи при M = const пропорциональны скольжению:
 ,
,
а распределение этих потерь определяется в соответствии с (4.18) соотношением сопротивлений — собственно в роторной обмотке рассеивается мощность  , а в дополнительных резисторах — мощность
, а в дополнительных резисторах — мощность  .
.
6. Капитальные затраты, как и в электроприводе постоянного тока, сравнительно невелики.
Вентильно-индукторный электропривод. Принцип действия.
В отличие от подавляющего большинства традиционных электрических машин действие вентильно-индукторной машины основано на притяжении ферромагнитного тела к возбужденному электромагниту — индуктору. Машина ВИМ (рис. 4.14) состоит из n-полюсного статора, несущего катушки, и m-полюсного пассивного ротора, при чем n ¹ m. Электронный коммутатор К подключает по сигналу датчика положения Д катушки — фазы к источнику питания — выпрямителю В или батарее. При возбужденной фазе А-Х (рис. 4.14) два полюса ротора притянуты к соответствующим полюсам статора. При размыкании А-Х и подключении к источнику питания фазы B-Y, т.е. при перемещении поля по часовой стрелке ближайшие полюса ротора притянутся к вновь возбужденной фазе, и ротор повернется на некоторый угол против часовой стрелки. Повторение переключений приведет к непрерывному вращению ротора со скоростью, определяемой частотой переключений. На момент, соответствующий каждой скорости, будут влиять как ток, протекающий по обмоткам включенной фазы, так и углы включения и отключения фазы.

Рис. 4.14. Схема вентильно-индукторного электропривода
Из изложенного принципа действия вентильно-индукторной машины следует, что удовлетворительная работа привода возможна лишь при весьма тонком управлении, включающем формирование импульсов тока. При таком управлении, осуществляемом специализированной схемой управления СУ вентильно-индукторный электропривод превосходит по основным показателям традиционный частотно-управляемый асинхронный электропривод.
В настоящее время — конец 90-х годов — теория и практика вентильно-индукторного электропривода находятся еще в стадии разработки, однако уже полученные результаты позволяют надеяться, что этот новый тип электропривода займет достойное место в семействе регулируемых электроприводов благодаря предельной простоте, низкой стоимости и высокой надежности машины, широким функциональным возможностям и хорошим энергетическим показателям.
Источник
Реостатное регулирование угловой скорости асинхронных двигателей




![]()
![]()
Введение резисторов в цепь ротора (реостатное регулирование) позволяет, как и для двигателей постоянного тока, регулировать угловую скорость двигателя. Регулирование осуществляется вниз от основной угловой скорости. Плавность регулирования зависит от числа ступеней включаемых резисторов.
Для асинхронных двигателей с фазным ротором применяется регулирование скорости путем изменения сопротивлений в цепи ротора, а для двигателей с короткозамкнутым ротором используются сопротивления в цепи статора, как это показано на рис. 6.1
 а)
а) 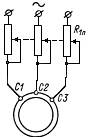 б)
б)
Рисунок 6.1–Схемы включения резисторов в цепь ротора а) и статора б)
 (6-1)
(6-1)
Согласно выражениям (6-1) при увеличении активного сопротивления вторичной цепи увеличивается критическое скольжение, и механическая характеристика становится более мягкой (см. рис. 6.2).
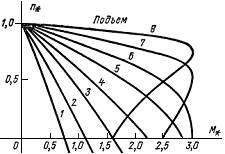
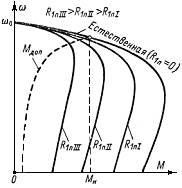
Рисунок 6.2 – Механические характеристики асинхронного двигателя при регулировании скорости изменением сопротивления в цепи ротора а) и статора б)
При увеличении скольжения в 2 раза по сравнению с номинальным, т. е. при снижении скорости всего лишь на 8  15%, допустимый момент уменьшается в 2 раза. По этой причине диапазон регулирования обычно не превышает (1,5 2):1.
15%, допустимый момент уменьшается в 2 раза. По этой причине диапазон регулирования обычно не превышает (1,5 2):1.
При неизменном моменте нагрузки и реостатном управлении потери мощности в роторной цепи изменяются пропорционально скольжению, а потери в статоре не зависят от скольжения и остаются неизменными при данном моменте нагрузки. Если, например, скорость двигателя снижена вдвое по сравнению с номинальной, то примерно половина всей потребляемой из сети мощности теряется в регулировочных резисторах. Следовательно, с ростом регулировочного сопротивления при одном и том же скольжении снижается к. п. д.
К недостаткам реостатного регулирования скорости относятся также мягкость механических характеристик и зависимость диапазона регулирования от величины нагрузки. В частности, регулирование скорости на холостом ходу практически невозможно.
Реостатное регулирование благодаря своей простоте находит практическое применение, например, в приводе подъемно-транспортных устройств, вентиляторов и насосов малой и средней мощности (до 100 кВт).
Источник
Регулирование скорости асинхронного двигателя
Наиболее распространены следующие способы регулирования скорости асинхронного двигателя : изменение дополнительного сопротивления цепи ротора, изменение напряжения, подводимого к обмотке статора, двигателя изменение частоты питающего напряжения, а также переключение числа пар полюсов.

Регулирование частоты вращения асинхронного двигателя путем введения резисторов в цепь ротора
Введение резисторов в цепь ротора приводит к увеличению потерь мощности и снижению частоты вращения ротора двигателя за счет увеличения скольжения, поскольку n = n о (1 — s).
Из рис. 1 следует, что при увеличении сопротивления в цепи ротора при том же моменте частота вращения вала двигателя уменьшается.
Жесткость механических характеристик значительно снижается с уменьшением частоты вращения, что ограничивает диапазон регулирования до (2 — 3) : 1. Недостатком этого способа являются значительные потери энергии, которые пропорциональны скольжению. Такое регулирование возможно только для двигателя с фазным ротором.
 Регулирование частоты вращения асинхронного двигателя изменением напряжения на статоре
Регулирование частоты вращения асинхронного двигателя изменением напряжения на статоре
Изменение напряжения, подводимого к обмотке статора асинхронного двигателя , позволяет регулировать скорость с помощью относительно простых технических средств и схем управления. Для этого между сетью переменного тока со стандартным напряжением U 1ном и статором электродвигателя включается регулятор напряжения .
При регулировании частоты вращения асинхронного двигателя изменением напряжения, подводимого к обмотке статора, критический момент М кр асинхронного двигателя изменяется пропорционально квадрату подводимого к двигателю напряжения U рет (рис. 3 ), а скольжение от U рег не зависит.

Рис. 1. Механические характеристики асинхронного двигателя с фазным ротором при различных сопротивлениях резисторов, включенных в цепь ротора

Рис. 2. Схема регулирования скорости асинхронного двигателя путем изменения напряжения на статоре

Рис. 3. Механические характеристики асинхронного двигателя при изменении напряжения подводимого к обмоткам статора
Если момент сопротивления рабочей машины больше пускового момента электродвигателя (Мс > Мпуск), то двигатель не будет вращаться, поэтому необходимо запустить его при номинальном напряжении Uном или на холостом ходу.
Регулировать частоту вращения короткозамкнутых асинхронных двигателей таким способом можно только при вентиляторном характере нагрузки. Кроме того, должны использоваться специальные электродвигатели с повышенным скольжением. Диапазон регулирования небольшой, до n кр.
Для изменения напряжения применяют трехфазные автотрансформаторы и тиристорные регуляторы напряжения.

Рис. 4. Схема замкнутой системы регулирования скорости тиристорный регулятор напряжения — асинхронный двигатель (ТРН — АД)
Замкнутая схема управления асинхронным двигателем , выполненным по схеме тиристорный регулятор напряжения — электродвигатель позволяет регулировать скорость асинхронного двигателя с повышенным скольжением (такие двигатели применяются в вентиляционных установках).
Регулирование частоты вращения асинхронного двигателя изменением частоты питающего напряжения
Так как частота вращения магнитного поля статора n о = 60 f /р, то регулирование частоты вращения асинхронного двигателя можно производить изменением частоты питающего напряжения.
 Принцип частотного метода регулирования скорости асинхронного двигателя заключается в том, что, изменяя частоту питающего напряжения, можно в соответствии с выражением при неизменном числе пар полюсов р изменять угловую скорость n о магнитного поля статора.
Принцип частотного метода регулирования скорости асинхронного двигателя заключается в том, что, изменяя частоту питающего напряжения, можно в соответствии с выражением при неизменном числе пар полюсов р изменять угловую скорость n о магнитного поля статора.
Этот способ обеспечивает плавное регулирование скорости в широком диапазоне, а механические характеристики обладают высокой жесткостью.
Для получения высоких энергетических показателей асинхронных двигателей (коэффициентов мощности, полезного действия, перегрузочной способности) необходимо одновременно с частотой изменять и подводимое напряжение. Закон изменения напряжения зависит от характера момента нагрузки Мс. При постоянном моменте нагрузки напряжение на статоре должно регулироваться пропорционально частоте.
Схема частотного электропривода приведена на рис. 5, а механические характеристики АД при частотном регулировании — на рис. 6.

Рис. 5. Схема частотного электропривода

Рис. 6. Механические характеристики асинхронного двигателя при частотном регулировании
С уменьшением частоты f критический момент несколько уменьшается в области малых частот вращения. Это объясняется возрастанием влияния активного сопротивления обмотки статора при одновременном снижении частоты и напряжения.
Частотное регулирование скорости асинхронного двигателя позволяет изменять частоту вращения в диапазоне (20 — 30) : 1. Частотный способ является наиболее перспективным для регулирования асинхронного двигателя с короткозамкнутым ротором. Потери мощности при таком регулировании невелики, поскольку минимальны потери скольжения.
 Большинство современных преобразователей частоты построено по схеме двойного преобразования. Они состоят из следующих основных частей: звена постоянного тока (неуправляемого выпрямителя), силового импульсного инвертора и системы управления.
Большинство современных преобразователей частоты построено по схеме двойного преобразования. Они состоят из следующих основных частей: звена постоянного тока (неуправляемого выпрямителя), силового импульсного инвертора и системы управления.
Звено постоянного тока состоит из неуправляемого выпрямителя и фильтра. Переменное напряжение питающей сети преобразуется в нем в напряжение постоянного тока.
Силовой трехфазный импульсный инвертор содержит шесть транзисторных ключей. Каждая обмотка электродвигателя подключается через соответствующий ключ к положительному и отрицательному выводам выпрямителя. Инвертор осуществляет преобразование выпрямленного напряжения в трехфазное переменное напряжение нужной частоты и амплитуды, которое прикладывается к обмоткам статора электродвигателя.
В выходных каскадах инвертора в качестве ключей используются силовые IGBT-транзисторы. По сравнению с тиристорами они имеют более высокую частоту переключения, что позволяет вырабатывать выходной сигнал синусоидальной формы с минимальными искажениями. Регулирование выходной частоты I вых и выходного напряжения осуществляется за счет высокочастотной широтно-импульсной модуляции.
Регулирование частоты вращения асинхронного двигателя переключение числа пар полюсов
Ступенчатое регулирование скорости можно осуществить, используя специальные многоскоростные асинхронные двигатели с короткозамкнутым ротором.
Из выражения n о = 60 f /р следует, что при изменении числа пар полюсов р получаются механические характеристики с разной частотой вращения n о магнитного поля статора. Так как значение р определяется целыми числами, то переход от одной характеристики к другой в процессе регулирования носит ступенчатый характер.
Существует два способа изменения числа пар полюсов. В первом случае в пазы статора укладывают две обмотки с разным числом полюсов. При изменении скорости к сети подключается одна из обмоток. Во втором случае обмотку каждой фазы составляют из двух частей, которые соединяют параллельно или последовательно. При этом число пар полюсов изменяется в два раза.

Рис. 7. Схемы переключения обмоток асинхронного двигателя: а — с одинарной звезды на двойную; б — с треугольника на двойную звезду
Регулирование скорости путем изменения числа пар полюсов экономично, а механические характеристики сохраняют жесткость. Недостатком этого способа является ступенчатый характер изменения частоты вращения асинхронного двигателя с короткозамкнутым ротором. Выпускаются двухскоростные двигатели с числом полюсов 4/2, 8/4, 12/6. Четырехскоростной электродвигатель с полюсами 12/8/6/4 имеет две переключаемые обмотки.
Использованы материалы книги Дайнеко В.А., Ковалинский А.И. Электрооборудование сельскохозяйственных предприятий.
Если Вам понравилась эта статья, поделитесь ссылкой на неё в социальных сетях. Это сильно поможет развитию нашего сайта!
Подписывайтесь на наш канал в Telegram!
Просто пройдите по ссылке и подключитесь к каналу.
Не пропустите обновления, подпишитесь на наши соцсети:
Источник



