
- iSopromat.ru
- Система сходящихся сил
- Приведение к равнодействующей
- Силовой многоугольник
- Вычисление равнодействующей
- Лекция 1. Основные понятия и положения статики. Сходящаяся система сил
- 1.1. Основные определения
- 1.2. Исходные положения статики
- 1.3. Сходящаяся система сил
- Вопросы для самоконтроля
- Задачи к лекции
iSopromat.ru

Равнодействующая системы сходящихся сил приложена в точке пересечения линий действия всех сил и равна их геометрической сумме.
Система сходящихся сил
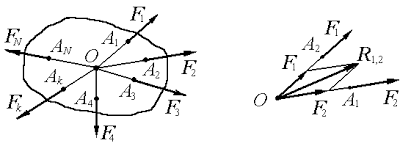
Пусть, к абсолютно твердому телу приложена система N сил (F1, F2, … FN), расположенных в пространстве так, что их линии действия пересекаются в одной точке О (рисунок 1).
Такую систему сил называют системой сходящихся сил. Упростим систему сходящихся сил, т.е. решим первую задачу статики.
Приведение к равнодействующей
Докажем, что данная система сил эквивалентна одной силе, т.е. приводится к равнодействующей силе.
В самом деле, так как сила есть вектор скользящий, то все силы данной системы можно перенести вдоль линий их действия в точку О.
Далее, по четвертой аксиоме, силы F1 и F2 можно заменить их равнодействующей R1,2 (рисунок 1), которая определяется диагональю параллелограмма, построенного на этих силах как на сторонах, и направленной по этой диагонали, т.е.
Далее можно записать аналогичные соотношения для полученной равнодействующей силы R * 1,2 и силы F3, тогда
Для системы N сил окончательно будем иметь
На рисунке 2, a показано построение равнодействующей указанным способом на примере системы, состоящей из четырех сил. Однако процесс определения равнодействующей удобнее вести иным путем, с помощью построения так называемого силового многоугольника.
Силовой многоугольник
Из конца вектора силы F1 (точки В) проводим вектор ВС, геометрически равный силе F2. Из конца этого вектора (точки С) проводим вектор СD равный силе F3. Из конца этого вектора (точки D) проводим вектор DE, равный силе F4.
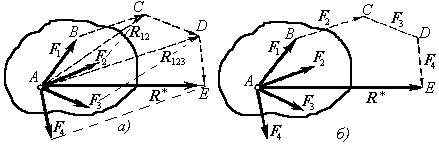
Полученный многоугольник ABCDE называется силовым многоугольником. Процесс его построения хорошо виден на рисунке 2, б. Стороны силового многоугольника называются составляющими силами.
Вектор АЕ, соединяющий начало А первой силы с концом Е последней силы и направленный навстречу составляющим силам, называется замыкающей стороной силового многоугольника.
Следовательно, равнодействующая системы сходящихся сил изображается в выбранном масштабе замыкающей силового многоугольника, построенного на составляющих силах.
Нахождение равнодействующей системы сходящихся сил по правилу силового многоугольника называется векторным или геометрическим сложением сил.
Таким образом, мы доказали, что система сходящихся сил в общем случае эквивалентна одной силе, т.е. равнодействующей, которая приложена в точке пересечения линий действия всех сил и равна их геометрической сумме.
Вычисление равнодействующей
Для аналитического определения равнодействующей найдем ее проекции Rx, Ry, Rz на оси декартовой системы координат. Имеем
Тогда величина равнодействующей определится следующей формулой:


Для определения направления равнодействующей R* воспользуемся обычными выражениями для направляющих косинусов:
Здесь α , β , γ — углы между положительным направлением осей координат и равнодействующей.
Равенства (2)-(5) позволяют определить модуль и направление равнодействующей по заданным проекциям составляющих сил.
В случае плоской системы сходящихся сил оси координат можно взять в плоскости действия сил и тогда формулы (2)-(5) упрощаются.
Уважаемые студенты!
На нашем сайте можно получить помощь по техническим и другим предметам:
✔ Решение задач и контрольных
✔ Выполнение учебных работ
✔ Помощь на экзаменах
Источник
Лекция 1. Основные понятия и положения статики. Сходящаяся система сил
1.1. Основные определения
Решение многих важных технических задач сводится к изучению механического движения и механического взаимодействия различных материальных тел – конструкций, машин, механизмов и их деталей и т.д. Наука о механическом движении и взаимодействии тел называется механикой.
Под механическим движением понимают изменение взаимного положения тел в пространстве с течением времени. Тело называют свободным, если его движение не стеснено другими телами. В противном случае тело называется несвободным. Механическим взаимодействием называется такое действие тел друг на друга, которое может вызвать изменение движения этих тел или их формы.
Диапазон проблем, изучаемых механикой, весьма широк. В зависимости от того, движение каких именно тел рассматривается, выделяют механику жидкости и газа, механику деформируемого твердого тела (включая теорию упругости и теорию пластичности). Наиболее общие законы механического движения и взаимодействия материальных тел изучает теоретическая механика. Как правило, в данном разделе науки рассматриваются материальные точки и абсолютно твердые тела.
Тело называют материальной точкой, если его размерами в условиях задачи можно пренебречь. Абсолютно твердое тело характеризуется тем, что расстояние между любыми двумя его точками остается постоянным. Иными словами, абсолютно твердое тело не подвержено деформации.
Разумеется, и материальная точка, и твердое тело – это идеализации. В реальности не существует тел с бесконечно малыми размерами, равно как и тел, которые нельзя деформировать. Так, поверхность стола прогибается даже под весом пушинки; дождевая капля, падающая с высоты километра, имеет небольшие, но вполне определенные размеры. Однако во многих практически важных случаях малыми деформациями, а также размерами некоторых тел можно пренебречь. Это существенно упрощает поставленные задачи, но их решения будут вполне пригодны и для описания реальных деформируемых тел конечных размеров.
Пример. Предположим, требуется описать полет мяча вдоль футбольного поля и его удар о штангу. Мяч движется (например, относительно ворот и относительно воздушных масс над полем). В полете мяч взаимодействует с окружающей его средой – за ним образуются завихренные воздушные потоки. Ударяясь о штангу, мяч вступает в механическое взаимодействие с воротами. Одним из результатов этого взаимодействия является изменение движения – мяч отскакивает от штанги и летит в другую сторону. Помимо этого, в момент удара и мяч, и штанга деформируются. Как видно, обычное явление оказывается довольно сложным, причем разные его аспекты относятся к различным разделам механики. Возмущения, вносимые мячом в воздушный поток, можно детально описать, пользуясь методами механики жидкости и газа; изменение формы мяча и штанги при ударе моделируется приемами механики деформируемого твердого тела. Наконец, в простейшем случае, пренебрегая деформациями и возмущениями воздушного потока, мы получим задачу теоретической механики: рассчитать скорость тела после удара, если его скорость до удара известна.
На достижениях теоретической механики базируются и многие специальные технические дисциплины, например, теория механизмов и машин.
Мерой интенсивности механического взаимодействия является сила. Это векторная величина: она характеризуется своим числовым значением (модулем), направлением и точкой приложения.
Пример. Чтобы открыть дверь, к ней следует приложить некоторое усилие. В зависимости от того, куда и в каком направлении приложено это усилие, эффект будет различным. Так, если дверь толкать в точке ее подвеса, она не повернется. Аналогично, она не будет двигаться, если толкать ее в торец параллельно дверному полотну. Подробнее этот пример будет рассмотрен в Лекции 3.
В интернациональной системе единиц СИ модуль силы измеряется в ньютонах (Н). Один ньютон равен силе, с которой Земля притягивает к себе тело массой примерно 102 г, находящееся вблизи земной поверхности.
Замечание. В системе СГС («сантиметр, грамм, секунда») единицей измерения силы служит дина: 1 дин = 10 –5 Н. В технической системе единиц МКГСС («метр, килограмм-сила, секунда») сила измеряется в килограмм-силах (кГ или кгс): 1 кГ = 9.81 Н. Килограмм-сила равна силе, с которой сила тяжести действует на тело массой 1 кг. В настоящее время эта единица считается устаревшей и, по мнению Международной органиации законодательной метрологии, должна быть выведена из обращения. Тем не менее, она еще продолжает встречаться в технической литературе.
Далее векторные величины обозначаются стрелочками (\(\vec F\)), а их модули (числовые значения) – как правило, теми же буквами, но без дополнительных знаков: F. Иногда запись вида "F» будет символизировать проекцию силы на координатную ось, а для модуля силы \(\vec F\) мы будем использовать обозначение \(|\vec F|\).
Линией действия силы называется прямая, проходящая параллельно силе через ее точку приложения (рис. 1.1).

Рис. 1.1. Сила \(\vec F\) приложена к точке A. Линия действия силы показана штрихом
Вся совокупность сил, приложенных к данному телу (или системе тел), называется системой сил (рис. 1.2).

Рис. 1.2. К телу приложена система из трех сил
Система сил называется плоской, если все их линии действия лежат в одной плоскости. В противном случае систему называют пространственной.
Очевидно, прикладывая к телу разные системы сил, мы сможем оказать на него разное действие. Говорят, что системы сил эквивалентны, если они оказывают на тело одинаковое воздействие. Если заданная система эквивалентна одной силе, эту силу называют равнодействующей данной системы. Уравновешивающая сила равна равнодействующей по модулю, противоположна по направлению и действует вдоль той же прямой (рис. 1.3).

Рис. 1.3. Силы \(\vec R\) и \(\vec Q\) являются, соответственно, равнодействующей и уравновешивающей для системы \(\vec F_<1>\), \(\vec F_<2>\), \(\vec F_<3>\)
Отметим, что не у каждой системы сил есть равнодействующая (и, соответственно, уравновешивающая). Примеры систем сил, не имеющих равнодействующей, будут приведены в Лекции 3 и Лекции 6.
Силы, приложенные к телу или системе тел, можно подразделить на внешние и внутренние. Внешними называются силы, действующие со стороны тел, на принадлежащих изучаемой системе тел. Силы, действующие между телами, входящими в систему (или между частями одного тела) называются внутренними.
Пример. По отношению к наполненному воздухом воздушному шару сила земного притяжения будет внешней, а силы, с которыми молекулы горячего воздуха бьют об оболочку шара, раздувая ее, – внутренними. В то же время, если рассмотреть только оболочку шара, то силы ударов молекул будут внешними. Напротив, при рассмотрении системы «Земля + воздушный шар» сила земного притяжения оказывается внутренней.
Различают также сосредоточенные и распределенные силы. Сила называется сосредоточенной, если приложена к телу в одной конкретной точке. До сих пор в этой лекции речь шла только о сосредоточенных силах. Распределенные силы (их также называют распределенной нагрузкой) действуют на все точки, принадлежащие некоторому объему, поверхности или отрезку какой-либо линии. Сосредоточенные силы являются удобной идеализацией: действия над ними легко заменить действиями над векторами, но на практике невозможно приложить усилие к одной-единственной точке. Силу считают сосредоточенной, когда объем (площадь, длина) той области, на которой она распределена, много меньше объема всей области, рассматриваемой в задаче. Далее в пособии в большинстве случаев это ограничение считается выполненным; тот факт, что та или иная сила является распределенной, каждый раз оговаривается особо.
Пример. Силу, развиваемую при надавливании канцелярской кнопкой на стол, можно считать сосредоточенной, поскольку площадь соприкосновения заостренной части кнопки с поверхностью стола весьма мала. Опираясь на стол рукой, мы прикладываем к нему распределенное усилие, ибо ладонь соприкасается с поверхностью стола на гораздо большей площади.
Под действием некоторой системы сил тело может оказаться в равновесии, т.е. не изменять своего положения относительно других тел (например, относительно Земли) или двигаться относительно них прямолинейно и равномерно. В таком случае систему сил, приложенных к телу, называют уравновешенной (экивалентной нулю).
Замечание. Как видно, понятие равновесия является более общим, чем понятие покоя. Действительно, состояние покоя можно рассматривать как движение с постоянной нулевой скоростью. По определению, механическое взаимодействие, выражаемое силой, может привести к изменению движения (а не положения непосредственно). Если тело движется прямолинейно и равномерно (в частности, покоится), такого изменения не происходит, а значит, воздействия на данное тело со стороны других тел уравновешены.
Раздел механики, излагающий общее учение о силах и изучающий равновесие тел, называется статикой. В статике решаются две основные задачи:
- Преобразование систем сил, действующих на твердые тела, в эквивалентные системы. Частным случаем такого преобразования служит приведение систем сил к простейшему виду.
- Определение условий равновесия систем сил, действующих на абсолютно твердые тела.
Знание статики очень важно для инженера-строителя: проектируемые здания и сооружения должны выдерживать большие нагрузки и занимать устойчивое неподвижное положение.
Пример. В 1834 г. на Дворцовой площади Санкт-Петербурга в память о победе над Наполеоном была водружена Александровская колонна (рис. 1.4), спроектированная О. Монферраном. Общая высота колонны составляет 47.5 м, из которых 25.6 м приходятся на монолитный ствол, 11.7 м – на навершие (ангела с крестом). Колонна держится на гранитном основании безо всяких креплений, лишь за счет своей массы (суммарно – 637 т у ствола и навершия) и точного расчета архитектора.

Рис. 1.4. Александровская колонна
Другими разделами теоретической механики являются кинематика и динамика. Первый из них изучает движение тел без учета действующих на них сил, а второй – движение тел под действием сил.
1.2. Исходные положения статики
Как и теоретическая механика в целом, статика основывается на небольшом количестве исходных положений (аксиом), из которых с помощью логических рассуждений и математических выкладок выводятся другие утверждения, формулы и т.д. Ниже перечисляются аксиомы статики:
Аксиома 1. Система из двух сил, приложенных к одному и тому же абсолютно твердому телу, уравновешена тогда и только тогда, когда они равны по модулю, противоположны по направлению и имеют общую линию действия (рис. 1.5).

Рис. 1.5. Равновесие твердого тела под действием двух сил
Пример. Если два человека с равными силами тянут тележку в противоположные стороны (рис. 1.6 а) или толкают ее каждый от себя (рис. 1.6 б), она не сдвинется с места.

Требование к двум уравновешенным силам – иметь общую линию действия – весьма существенно: если оно нарушается, образуется пара сил, которая не является уравновешенной системой.
Замечание. Теперь можно объяснить происхождение термина «уравновешивающая», введенного в п. 1.1. Действительно, согласно данному ранее определению и аксиоме 1, уравновешивающая и равнодействующая образуют систему сил, эквивалентную нулю. Поэтому исходная система сил (без равнодействующей) с присоединенной к ней уравновешивающей также будет уравновешенной.
Важно указать и на такой факт: под действием одной силы свободное тело будет находиться в равновесии тогда и только тогда, когда эта сила равна нулю.
Замечание. Последнее утверждение более подробно обсуждается не в статике, а в динамике.
Аксиома 2. Действие заданной системы сил на абсолютно твердое тело не изменится, если к этой системе добавить или из нее исключить уравновешенную систему сил.
Эту аксиому можно сравнить с известным свойством чисел: если к любому числу прибавить или вычесть из него нуль, исходное число не изменится.
Следствие. Действие силы на твердое тело не меняется при переносе ее точки приложения вдоль линии действия. Иными словами, силу можно считать приложенной в любой точке ее линии действия – вектор силы является скользящим.
(Отметим, что вектор называют скользящим, если его можно откладывать от любой точки на его линии действия, не меняя при этом действия самого вектора. Если же вектор может быть отложен от любой точки пространства без изменения действия, то его называют свободным. Векторы, изученные в школьном курсе элементарной математики, – свободные. Сила же таким вектором не является. Более подробно вопрос об откладывании одной и той же силы от разных точек будет разобран далее.)
Доказательство. Предположим, что сила \(\vec F\) отложена от точки A, и требуется перенести ее в некоторую точку B на той же линии действия, как показано на рис. 1.7 а). Для этого присоединим к исходной силе уравновешенную систему сил \(\vec F’\), \(\vec F»\), направленных вдоль той же линии действия, что и \(\vec F\). Очевидно, одна из них (пусть \(\vec F’\)) окажется сонаправленной с \(\vec F\), а другая (\(\vec F»\)) – направленной противоположно ей. Дополнительно потребуем, чтобы сила \(\vec F’\) была отложена от точки B (рис. 1.7 б). Мы имеем на это право, поскольку в аксиоме 1 ничего не сказано о выборе точек приложения уравновешенных сил на их общей линии действия.

После таких построений силы \(\vec F\) и \(\vec F»\) равны по модулю, противоположны по направлению и разделяют общую линию действия. Значит, они уравновешивают друг друга, и их можно отбросить; в итоге остается лишь сила \(\vec F’\). Если теперь сравнить начало и конец рассуждений, то вместо силы, отложенной от точки A мы получили равную по величине и сонаправленную ей силу, отложенную от заданной точки B на той же линии, т.е. добились желаемого результата.
Пример. Чтобы передвинуть одну и ту же тележку с грузом, ее можно либо тянуть, либо толкать (рис. 1.8). Если в обоих случаях прикладывать к ней одну и ту же по величине силу вдоль одной и той же линии действия, то эффект будет одинаковым.

Аксиома 3 (правило параллелограмма сил). Две силы, приложенные к одному и тому же телу в одной и той же точке, имеют равнодействующую, отложенную от этой же точки. Эта равнодействующая изображается диагональю параллелограмма, построенного на исходных силах, как на сторонах (рис. 1.9).
Другими словами, силы, отложенные от одной точки, можно складывать, пользуясь известными правилами действий над векторами.

Рис. 1.9. \(\vec R\) – равнодействующая сил \(\vec F_<1>\) и \(\vec F_<2>\)
Замечание 1. С точки зрения математики безразлично, каким правилом – параллелограмма или треугольника – пользоваться при сложении векторов. Тот же самый вектор \(\vec F_<2>\) на рис. 1.9 можно отложить от конца вектора \(\vec F_<1>\), сложив две силы по правилу треугольника.
Замечание 2. Если к телу приложены две взаимно уравновешенные силы, то их (пользуясь тем, что сила – скользящий вектор) можно отложить от одной точки (рис. 1.10). Если теперь сложить их по правилу параллелограмма, то получится нулевой вектор, ибо параллелограмм сил вырождается в отрезок.

Отметим, что складывать силы, приложенные к разным телам, нельзя: непонятно, к какому телу приложена их равнодействующая.
Аксиома 4 (закон равенства действия и противодействия). Любые два взаимодействующих тела действуют друг на друга с силами, равными по величине, но противоположными по направлению.
Пример. Предположим, что человек бьет кулаком в стену. При этом кулак и стена вступают в механическое взаимодействие. Соответственно, сила удара (действие) будет равна силе реакции стены на удар (противодействие). Поэтому чем более сильный удар будет нанесен, тем большую боль почувствует человек.
Аналогично предыдущей аксиоме, нельзя сказать, что две эти силы образуют уравновешенную систему, ибо они приложены к разным телам.
Аксиома 5 (свойство внутренних сил). При исследовании равновесия твердого тела следует учитывать только внешние силы. Внутренние силы образуют уравновешенную систему и потому при рассмотрении равновесия тела в целом не берутся в расчет.
Замечание. Можно попытаться рассмотреть это утверждение не как самостоятельную аксиому, а как следствие предыдущего исходного положения статики. Действительно, разделим исходное твердое тело на две части. По аксиоме 4, силы, с которыми они взаимодействуют, равны по модулю и противоположны по направлению. С другой стороны, эти силы можно считать приложенными к телу в целом и сделать вывод, что в этом случае они уравновешивают друг друга. Однако возникает вопрос: где гарантия, что у этих сил общая линия действия? Этот факт в общем случае не так просто обосновать, поэтому будем считать свойство внутренних сил самостоятельной аксиомой.
Аксиома 6 (принцип отвердевания). Если деформируемое тело под действием приложенных сил находится в равновесии, то абсолютно твердое тело той же формы и размеров также находится в равновесии.
Пример. Пусть две равные по силе команды перетягивают канат (рис. 1.11). С точки зрения теоретической механики, ничего не изменится, если заменить его жестким стержнем той же формы, размеров и массы.

Обратное, вообще говоря, неверно. Может оказаться так, что абсолютно твердое тело уравновешено, а деформируемое (тех же размеров и формы) – нет. Так, жесткий стержень из предыдущего примера останется в равновесии и в случае, когда его будут не растягивать, а сжимать, прикладывая к противоположным концам равные силы. Канат же в этом случае сомнется.
1.3. Сходящаяся система сил
Рассмотрим систему сил \(\vec F_<1>\), \(\vec F_<2>\), \(\vec F_<3>\). приложенных к твердому телу, и попытаемся найти их равнодействующую. Это просто, если все силы отложены от одной точки. Сначала по правилу параллелограмма сложим \(\vec F_<1>\) и \(\vec F_<2>\), заменив их одной равнодействующей \(\vec R_<1>\); затем таким же образом сложим силы \(\vec R_<1>\) и \(\vec F_<3>\), заменяя их силой \(\vec R_<2>\), и т.д. (рис. 1.12).

Рис. 1.12. Последовательное сложение нескольких сил по правилу параллелограмма
Тем самым, на каждом следующем шаге мы будем переходить к эквивалентной системе сил, содержащей на одну силу меньше, чем на предыдущем шаге. В конце концов, останется единственная сила, приложенная к телу; она и будет равнодействующей исходной системы.
Возникает вопрос: как быть, если точки приложения сил не совпадают?
Дадим определение. Система сил, приложенных к телу, называется сходящейся, если все их линии действия пересекаются в одной точке (рис. 1.13).

Рис. 1.13. Сходящаяся система сил
В таком случае можно воспользоваться следствием из аксиомы 2 и перенести все силы в точку пересечения их линий действия, после чего сложить, как описано выше. Отсюда можно сделать важный вывод:
Сходящаяся система сил имеет равнодействующую. Она представляет собой векторную сумму сил, приложенных к телу, и прикладывается в точке пересечения их линий действия.
Замечание. Если твердое тело находится под действием сходящейся системы сил, то его во многих случаях можно считать материальной точкой. Размеры тела перестают играть роль – оно «стягивается» в ту точку, где пересекаются линии действия всех приложенных к нему сил.
Как уже было сказано, при сложении сил, отложенных от одной точки, применяются обычные «школьные» правила действий над векторами. Например, их можно складывать по правилу многоугольника: начало каждого следующего вектора силы должно совпадать с концом предыдущего. При этом самый первый вектор откладывается от точки пересечения A линий действия сил. Полученная геометрическая фигура называется силовым многоугольником. Чтобы найти равнодействующую \(\vec R\), остается соединить начало многоугольника с его концом (рис. 1.14).

Рис. 1.14. Построение силового многоугольника и равнодействующей
Если известны компоненты сил вдоль осей некоторой системы координат, все операции можно произвести аналитически, складывая или вычитая соответствующие проекции разных сил.
Замечание. Далее при действиях над векторами в кординатах будем всегда предполагать, что используемая система координат – декартова прямоугольная. Если речь идет о координатах в пространстве, то система координат считается правой: при взгляде с конца третьей оси кратчайший поворот от первой оси ко второй должен быть виден происходящим проив часовой стрелки. Все эти свойства далее специально оговариваться не будут.
Выше отмечалось, что одной из основных задач статики служит изучение условий равновесия систем сил, действующих на твердые тела. Для изучаемого нами случая это условие формулируется так:
Тело под действием сходящейся системы сил находится в равновесии, если геометрическая сумма всех приложенных к нему сил равна нулю.
Действительно, сходящаяся система эквивалентна одной силе – равнодействующей. Следовательно, если система уравновешена, то эта сила должна быть нулевой. Поэтому силовой многоугольник уравновешенной системы должен быть замкнутым – для получения нулевой равнодействующей его начало обязано совпасть с концом.
Очевидно, плоская система из двух непараллельных сил всегда является сходящейся: на плоскости прямые либо пересекаются, либо параллельны. Три силы уже могут не быть сходящимися: линия действия третьей силы может «проехать» мимо точки пересечения первых двух. Связать вопросы о равновесии и сходимости плоской системы трех непараллельных сил помогает следующее утверждение.
Теорема (о трех силах). Если твердое тело под действием плоской системы из трех сил находится в равновесии, то их линии действия пересекаются в одной точке.
Доказательство. Пусть к телу приложены силы \(\vec F_<1>\), \(\vec F_<2>\), \(\vec F_<3>\), лежащие в одной плоскости, причем \(\vec F_<1>\) и \(\vec F_<2>\) не параллельны. Тогда их линии действия пересекаются, и эти силы имеют равнодействующую \(\vec R\) (рис. 1.15).

Рис. 1.15. Доказательство теоремы о трех силах
Исходная уравновешенная система \(\vec F_<1>\), \(\vec F_<2>\), \(\vec F_<3>\) эквивалентна двум силам \(\vec F_<3>\) и \(\vec R\), которые, таким образом, обязаны уравновешивать друг друга. Значит, они разделяют общую линию действия. Но (по нашему построению) на ней лежит точка пересечения линий действия сил \(\vec F_<1>\) и \(\vec F_<2>\). Тем самым, линии действия всех трех исходных сил пресекаются в этой точке. Теорема доказана.
Обратное неверно: понятно, что произвольная сходящаяся плоская система трех сил не обязана быть уравновешенной. Она может иметь равнодействующую, не равную нулю.
В пространстве уже и система из двух непараллельных сил может не быть сходящейся, ибо их линии действия в пространстве могут оказаться скрещивающимися.
Вопросы для самоконтроля
- Из каких основных разделов состоит теоретическая механика и что изучает каждый из них?
- Какие из перечисленых явлений можно назвать механическим движением: а) полет шмеля над морем; б) образование воздушных пузырей при кипячении воды; в) рост дерева? Ответ обосновать. Привести свои примеры механического движения (не менее трех).
- Каковы основные задачи статики?
- Ледокол в Арктике таранит лед. Какие внешние силы при этом действуют на судно? Можно ли указать точки приложения этих сил? Какие из них являются сосредоточенными, а какие – распределенными?
- Доказать, что сила является скользящим вектором.
- При ударе молотком по гвоздю последний углубляется в деревянную доску на некоторое расстояние. Сам молоток при этом какое-то время продолжает двигаться вместе с гвоздем, а не отскакивает в противоположную сторону. Не противоречит ли это закону равенства действия и противодействия? Почему?
- Под действием силы давления воздуха (внутренней) воздушный шарик, находившийся в состоянии равновесия, разрывается и его части приходят в движение. Тем самым, начальное состояние равновесия нарушается. С другой стороны, согласно аксиоме 5, внутренние силы на равновесие не влияют. Как устранить это противоречие?
- При каком условии тело под действием сходящейся системы сил находится в равновесии?
- Сформулировать и доказать теорему о трех силах.
Задачи к лекции
Силы \(F_<1>=6\sqrt<2>\) Н и F2 = 2 Н приложены к одной точке и образуют угол 45°. Найти величину их равнодействующей.
Указание. Воспользуйтесь теоремой косинусов.
Силы \(\vec F_<1>\), \(\vec F_<2>\) и \(\vec F_<3>\) лежат в плоскости Oxy, причем их линии действия проходят через начало координат. Сила \(\vec F_<1>\), численно равная 20 Н, образует с положительным направлением оси Ox угол, равный 30°, сила \(\vec F_<2>\), численно равная \(20\sqrt<3>\) Н, – угол в 120°, а сила \(\vec F_<3>\), чья величина составляет 10 Н, – угол 270°. Найти величину их уравновешивающей и угол, который она образует с положительным направлением оси абсцисс.
Указание. Запишите уравнения линий действия всех сил, найдите точку пересечения первых двух линий и докажите, что третья линия проходит через эту точку.
Ответы. 1. 10 Н. 2. 30 Н; 90°. 3. 300 Н. 4. \(\vec R=\<-1;7\>\); A(1; 2).
Источник



