
3.4. Расчет способа движения агрегатов. Гоновый – челночный.

L е – длина гона, м.
L р – длина рабочая, м.
E – ширина поворотной полосы, м.
l — длина выезда агрегата, м.
R – радиус поворота, м.
C — ширина загона, м.
B р – рабочая ширина захвата агрегата, м.
Ширина поворотной полосы
Е= 2,8 R +0,5Вр + l (м)
Для прицепных агрегатов:
Е=1,14 R + 0,5 Вр + l (м)
Для навесных агрегатов:
Длина рабочего хода
Длина холостого хода
С – ширина загона, м
С=  (м)
(м)
Количество заездов агрегата на загоне
na =  (раз)
(раз)
Суммарная длина рабочего хода
Суммарная длина холостого хода
Коэффициент рабочих ходов
φ = 
Задача: Рассчитать способ движения для посева зерновых, агрегаты трактор Т-4А,сцепка С-11У и три сеялки СЗП –3,6. Длина гона L — = 1000 м.
Определяем ширину поворотной полосы прицепного агрегата
R — радиус поворота, R = 0,9 * Вр + l
Длина заезда агрегата —
Е = 2,8 х 9,7 + 0,5 * 10,8 + 13 = 45,5 (м)
Необходимо, чтобы ширина поворотной полосы была кратной ширине захвата, поэтому Е = 43,2 м, т.е. кратно четырем захватам агрегата.
Длина рабочего хода.
L р = L е —2Е = 1000 – 2 * 43,2 = 913,6 м.
3. Длина холостого хода.
4. Определяем ширину загона, если производительность за смену
С =  м
м
5. Количество заездов агрегата за смену.
na = =  раз
раз
6. Определяем суммарную длину рабочего хода на загоне
Sp = Lp * пa = 913,8 * 46 = 42025,6 м.
Определяем суммарную длину холостого хода на загоне
Sх = Lх * пa = 86 * 46 = 3956 м.
Определяем коэффициент рабочих ходов
φ =  =
= 
Вывод: Данный способ движения обеспечит высокопроизводительную работу, т.к. φ = 0,91 и потери на холостой ход составляет 9%, что в пределах нормы.
Расчет способа движения гоновый с чередованием загонов в свал и в развал.

С =  (м)
(м)
R – радиус поворота, м
Кс – коэффициент производительности для беспетлевых поворотов
Вр — рабочая ширина захвата
Lp – рабочая длина гона
Е=1,14 R + 0,5 Вр + l (м)
l – длина заезда агрегата, м
3. Длина рабочая
4. Коэффициент рабочих ходов.
φ = 
Данный способ движения обеспечит высокопроизводительную работу, так как потери на холостой ход составляют 7%, что в пределах нормы.
3.5. Подготовка агрегата к работе
Подготовка агрегата к работе включает в себя следующие операции:
Подготовку трактора (проведение ЕТО, расстановка ходовых колес на нужную колею и просвет, настройка механизма навески)
Подготовку сельскохозяйственной машины (проведение ЕТО, расстановка рабочих органов по ширине и на глубину хода, установка нормы высева и др.).
Подготовку сцепки (проверка технического состояния, установка вылета маркёра и др.).
Комплектование агрегата (описание порядка присоединения машины к сеялке, и сцепки и трактору)
В графической части курсового проекта вычерчивается схема составленного агрегата.
Тут вы можете оставить комментарий к выбранному абзацу или сообщить об ошибке.
Источник
Способы движения агрегатов
Движение МТА при работе на участке характеризуется определенной цикличностью. В каждый цикл входят рабочий ход и поворот для изменения направления движения. Повторяющееся чередование рабочих ходов, поворотов и заездов называется способом движения агрегата. Насчитывается более 50 различных способов движения МТА.
При выборе способа движения МТА на данном участке поля необходимо учитывать возможность получения наибольшей производительности и экономичности работы агрегата с обязательным выполнением агротребований.
Основные способы движения:
1. Челночный ¾ гоновый петлевой способ (рис. 2.25). Используется в основном при работе симметричных агрегатов (посев, посадка, культивация и др.).
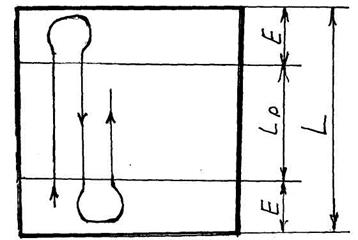
Рис. 2.25 Схема челночного способа движения агрегатов
Коэффициент рабочих ходов
j  .
.
Для определения j необходимо найти общую длину рабочих и холостых ходов на загоне (участке).
Если рабочая длина загона  , а его ширина С, ширина захвата агрегата
, а его ширина С, ширина захвата агрегата  , то общая длина рабочих ходов (м) :
, то общая длина рабочих ходов (м) :

где  ¾ число рабочих ходов на загоне.
¾ число рабочих ходов на загоне.
Число холостых поворотов на загоне, как правило, на один меньше, чем рабочих ходов. Однако, учитывая, что агрегат после обработки первого загона переезжает на второй, для расчетов можно принять количество рабочих и холостых ходов одинаковым, т.е.  .
.
j  .
.
Аналогично j можно определить и для других способов движения.
2. Гоновые способы движения всвал и вразвал (рис. 2.26) применяются при вспашке, уборке и других работах.

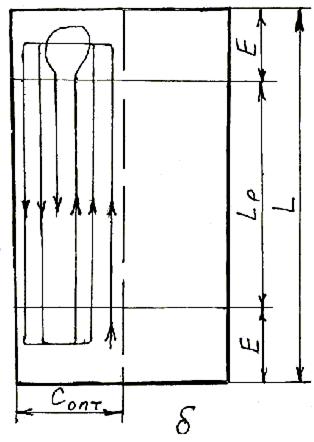
Рис. 2.26 Схема движения агрегата всвал (а) и вразвал (б)
При работе всвал и вразвал для уменьшения холостого пути участок целесообразно разбивать на загоны оптимальной ширины. Оптимальная ширина загона определяется по выражению:
 .
.
3. При уборке пропашных культур зачастую применяется беспетлевой способ движения с перекрытием.
4. Круговой способ движения применяется на уборке силосных, зерновых культур и других работах.
5. Диагонально-челночный и диагонально-перекрестный способы движения используются при бороновании, дисковании и других работах.
При изучении технологии механизированных работ будет более детально изучаться тот или иной способ движения.
При выборе способа движения в первую очередь исходят из агротехнических требований к качеству работы, удобству обслуживания, возможности уменьшения количества вспомогательных операций. Если эти условия позволяют применять различные способы движения, следует выбирать тот, который обеспечивает максимальное значение j .
При работе МТА необходимо учитывать:
1) на коротких участках коэффициент рабочих ходов больше у агрегатов с меньшей шириной захвата;
2) чем больше радиус поворота (  ), тем меньше значение коэффициента
), тем меньше значение коэффициента
рабочих ходов (j);
3) чем больше длина гона  , тем меньше радиус поворота агрегата влияет на величину коэффициента рабочих ходов (j);
, тем меньше радиус поворота агрегата влияет на величину коэффициента рабочих ходов (j);
4) на участках с малой длиной гона целесообразно применять беспетлевой (лучше всего комбинированный) способ движения, а при больших
длинах гона ¾ петлевой (обычно с чередованием работы всвал и вразвал).
Нам важно ваше мнение! Был ли полезен опубликованный материал? Да | Нет
Источник
Выбор способа движения и вида поворотов агрегата
Движение машинно-тракторных агрегатов при обработке участков характеризуется определенной цикличностью. В каждый цикл входят рабочий ход и поворот для изменения направления движения на обратное или под некоторым углом к законченному рабочему ходу. К элементам движения агрегатов относятся также дополнительные заезды и переезды.
Способы движения МТА (рис.1) и виды поворотов (рис.2) зависят от вида выполняемой работы, предъявляемых агролесотехнических требований, конструктивных особенностей рабочих машин, систем соединения с трактором и других факторов.
При работе различных МТА на одной и той же обрабатываемой площади (особенно на вырубке) кинематика их отличается незначительно. Поэтому студенты в курсовой работе разрабатывают кинематику только одного агрегата из числа применяемых в технологической карте.
Студенты должны выбрать способ движения агрегата и вид поворота и в зависимости от основных кинематических данных агрегата определить длину холостого хода (Lх.х) одного поворота агрегата и наименьшую ширину поворотной полосы (Е). Зависимость длины холостого хода одного поворота и ширины поворотной полосы от кинематических параметров агрегата и вида поворота приведены в таблице 2.
Влияние вида поворота на ширину поворотной полосы
и длину холостого хода МТА
| Виды поворота | Ширина поворотной полосы Е | Длина холостого хода Lх одного поворота агрегата |
| Беспетлевые: — круговой — с прямым участком — угловой | 1,1R+0,5В+l 1,1R+0,5В+l 1,1R+0,5В+l | (3,2…4,0)R+2l (1,4…2,0)R+X+2l (1,6…1,8)R+2l |
| Петлевые: — грушевидный — односторонний — закрытая петля | 2,8R+0,5В+l 2,6R+0,5В+l 2,0R+0,5В+l | (6,6…8,0)R+2l (6,0…7,5)R+2l (5,0…6,5)R+2l |
| Только с навесными орудиями: — с открытой петлей — с закрытой петлей — угловая петля — игольчатый | 1,1R+0,5В+l 1,1R+0,5В+l 1,2R+0,5lтр+l 1,2R+0,5lтр+l | (4,1…5,0)R+2l (5,0…5,5)R+2l (2,5…3,5)R+2l (2,8…4,0)R+2l |
Примечания: R – радиус поворота агрегата, м; В – ширина агрегата, м; l – длина выезда (въезда) агрегата, м; Х – длина прямого хода на поворотной полосе, м; lтр – длина трактора, м.

Рисунок 1. Основные способы движения МТА:
вразвал (а); всвал (б); чередованием способов всвал и развал (в); комбинированный (г); челночный (д); реверсивный (е); диагональный (ж); диагонально-поперечный (з); круговой (и); Е – ширина поворотной полосы
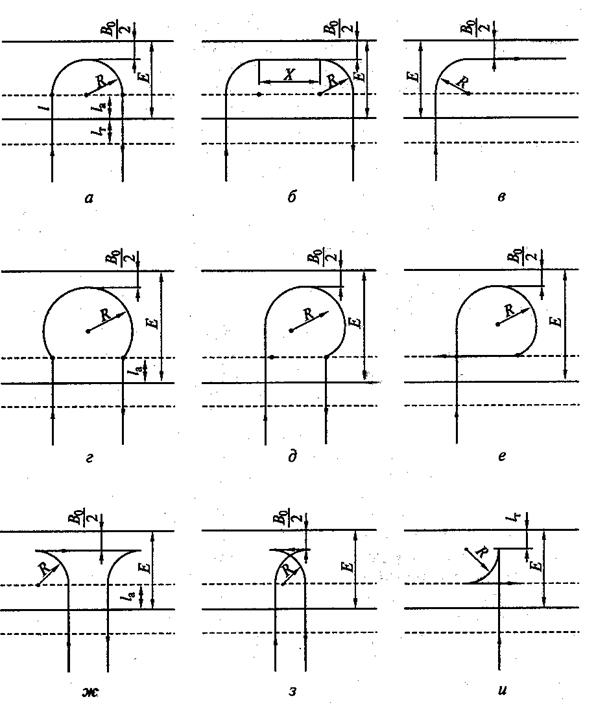
Рисунок 2. Основные виды поворотов лесохозяйственных агрегатов:
беспетлевые (а – круговой; б – с прямым участком; в – угловой); петлевые (г — грушевидный; д – односторонний; е – закрытая петля; ж – грибовидный с открытой петлей; з – грибовидный с закрытой петлей; и – угловая петля); Х – длина прямого хода на поворотной полосе; Во – ширина захвата лесохозяйственного агрегата; Е – ширина поворотной полосы; lа – длина агрегата; lт – длина трактора; R – радиус поворота
В практических расчетах радиус поворота принимается: для прицепных агрегатов с зубовыми боронами со сцепкой – равным ширине агрегата; с культиваторами, сеялками – 0,7-0,8 ширины МТА, в зависимости от числа машин в его составе. Для МТА с навесными рабочими машинами наименьший радиус поворота равен конструктивному радиусу поворота трактора.
При определении длины выезда агрегата (l), состоящего из колесного трактора и навешанных сзади рабочих машин, а также агрегатов с большим радиусом поворота принимают е = 0,1lк. Для агрегатов с прицепными машинами е = 0,5…0,75lк.
По направлению рабочих ходов различают три основные способа движения машинно-тракторных агрегатов: гоновые, комбинированные, челночные, реверсивные, диагональные и круговые.
При гоновых способах движения МТА выполняет рабочие ходы параллельно одной или двум сторонам рабочего участка с холостыми поворотами на обеих его концах. На прямоугольных участках с гоновым способом движения МТА наибольший эффект достигается при направлении гона агрегата по длинной стороне загона, так как в таких случаях уменьшается число поворотов.
К данной группе относятся способы движения МТА вразвал, всвал, чередование по загонам. Данные способы движения являются основными при основной вспашке лемешными многокорпусными плугами при обработке почвы в лесных питомниках, защитном лесоразведении. Основное преимущество способа чередования по загонам состоит в уменьшении числа свальных гребней и развальных борозд по сравнению с движением только всвал или вразвал.
Комбинированный способ движения позволяет уменьшить величину поворотных полос, повысить качество вспашки, уменьшить число развальных борозд. Этот способ применяется для частичной широкополосной обработке почвы для производства лесных культур, при защитном лесоразведении.
Челночный способ движения наиболее эффективен для простых одномашинных высокоманевренных МТА при выполнении таких операций, как частичная обработка почвы на вырубках, гладкая вспашка оборотными плугами на небольших участках лесных питомников.
Реверсивный способ движения применяется при выполнении механизированных работ в особо сложных условиях (лесоразведение на склонах и др.) при условии комплектования МТА с использованием тракторов, которые имеют фронтальные и задние навесные устройства для одновременного присоединения рабочих машин.
Диагональный способ движения применяется с целью достижения лучшего качества работ при бороновании, перекрестной междурядной культивации, когда рабочие ходы МТА необходимо выполнять под определенным углом к сторонам загона.
При круговом способе движения рабочие ходы совершаются без выключения рабочих органов вдоль всех четырех и более сторон рабочего участка. Круговые движения могут быть направлены от периферии к центру и, наоборот. В ряде случаев при изменении направления движения на угловых поворотах рабочие машины могут переводиться и в нерабочее положение.
Движение МТА в процессе работы на участке состоит из рабочих ходов и поворотов. При выборе вида поворота учитываются следующие требования: возможность его исполнения; соблюдение условий техники безопасности; достижение наибольшей производительности МТА и наименьшего расхода топлива, оставление возможно меньшей ширины поворотной полосы. Наиболее широко применяются на практике следующие группы поворотов: беспетлевые, петлевые и игольчатые.
Беспетлевые повороты делятся на три вида: круговой, поворот с прямым участком и угловой.
Из группы петлевых поворотов наиболее часто применяются грушевидный, односторонний и поворот с закрытой петлей.
Игольчатые повороты применяются при реверсивном способе движения МТА с фронтальной и задней навеской рабочих машин.
Источник



