
- Способы возбуждения машин постоянного тока и их классификация
- Типы возбуждения и механические характеристики двигателей постоянного тока
- 3.5. Механические характеристики двигателя постоянного тока при различных способах возбуждения
- 3.6. Потери энергии и кпд машин постоянного тока
- Механическая характеристика двигателя постоянного тока независимого возбуждения (ДПТ НВ)
- Характеристики и режимы при независимом возбуждении, U = const
- Характеристики и режимы при независимом возбуждении, I = const
- Двигатель постоянного тока с последовательным возбуждением
- Уравнения электромеханической характеристики ДПТ с ПВ
- Реальный ДПТ с ПВ
- Сравнение пусковых свойств двигателей с ПВ и НВ
- Ограничение величины
Способы возбуждения машин постоянного тока и их классификация
 Ток, протекающий в обмотке возбуждения основных полюсов, создает магнитный поток . Электрические машины постоянного тока следует различать по способу возбуждения и схеме включения обмотки возбуждения.
Ток, протекающий в обмотке возбуждения основных полюсов, создает магнитный поток . Электрические машины постоянного тока следует различать по способу возбуждения и схеме включения обмотки возбуждения.
Генераторы постоянного тока могут выполняться с независимым, параллельным, последовательным и смешанным возбуждением. Следует заметить, что теперь применение в качестве источников энергии генераторов постоянного тока очень ограничено.
Обмотка возбуждения генератора постоянного тока с независимым возбуждением получает питание от независимого источника — сети постоянного тока, специального возбудителя , преобразователя и др. (рис. 1, а). Эти генераторы применяются в мощных системах, когда напряжение возбуждения должно быть выбрано отличным от напряжения генератора, в системах регулирования скорости вращения двигателей, которые питаются от генераторов и других источников.
Значение тока возбуждения мощных генераторов составляет 1,0—1,5% от тока генераторов и до десятков процентов для машин мощностью порядка десятков ватт.
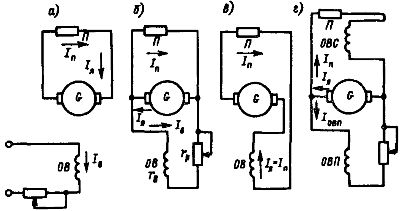
Рис. 1. Схемы генераторов постоянного тока: а — с независимым возбуждением; б — с параллельным возбуждением; в — с последовательным возбуждением; г — со смешанным возбуждением П — потребители
У г енератора с параллельным возбуждением обмотка возбуждения включается на напряжение самого генератора (смотрите рис. 1,б). Ток якоря I я равен сумме токов нагрузки I п и тока возбуждения I в: I я = I п + I в
Генераторы выполняются обычно для средних мощностей.
Обмотка возбуждения генератора с последовательным возбуждением включена последовательно в цепь якоря и обтекается током якоря (рис. 1, в). Процесс самовозбуждения генератора протекает очень бурно. Такие генераторы практически не используются. В самом начале развития энергетики применялась система передачи энергии с последовательно включенными генераторами и двигателями последовательного возбуждения.
Генератор со смешанным возбуждением имеет две обмотки возбуждения — параллельную ОВП и последовательную ОВС обычно с согласным включением (рис. 1, г). Параллельная обмотка может быть включена до последовательной («короткий шунт») или после нее («длинный шунт»). МДС последовательной обмотки обычно невелика и рассчитана только на компенсацию падения напряжения в якоре при нагрузке. Такие генераторы теперь также практически не применяются.
Схемы возбуждения двигателей постоянного тока подобны схемам для генераторов. Двигатели постоянного тока большой мощности выполняются обычно с независимым возбуждением . У двигателей параллельного возбуждения обмотка возбуждения получает питание от того же источника энергии, что и двигатель. Обмотка возбуждения включается непосредственно на напряжение источника энергии, чтобы не сказывалось влияние падения напряжения в пусковом сопротивлении (рис. 2).
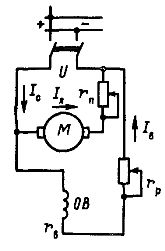
Рис. 2. Схема двигателя постоянного тока с параллельным возбуждением
Ток сети Ic составляется из тока якоря I я и тока возбуждения I в.
Схема двигателя последовательного возбуждения подобна схеме на рис. 1, в. Благодаря последовательной обмотке вращающий момент при нагрузке возрастает больше, чем у двигателей параллельного возбуждения, при этом скорость вращения уменьшается. Это свойство двигателей определяет их широкое применение в приводах электровозной тяги: в магистральных электровозах, городском транспорте и др. Падение напряжения в обмотке возбуждения при номинальном токе составляет единицы процентов от номинального напряжения.
Двигатели смешанного возбуждения из-за наличия последовательной обмотки в некоторой мере имеют свойства двигателей последовательного возбуждения. В настоящее время они практически не применяются. Двигатели параллельного возбуждения иногда выполняются со стабилизирующей (последовательной) обмоткой, включаемой согласно с параллельной обмоткой возбуждения, для обеспечения более спокойной работы при пиках нагрузки. МДС такой стабилизирующей обмотки невелика — единицы процентов от основной МДС.
Если Вам понравилась эта статья, поделитесь ссылкой на неё в социальных сетях. Это сильно поможет развитию нашего сайта!
Подписывайтесь на наш канал в Telegram!
Просто пройдите по ссылке и подключитесь к каналу.
Не пропустите обновления, подпишитесь на наши соцсети:
Источник
Типы возбуждения и механические характеристики двигателей постоянного тока




![]()
ЛЕКЦИЯ 24
В зависимости от способа подключения обмотки возбуждения ДПТ делятся на двигатели независимого, параллельного, последовательного и смешанного возбуждения. В двигателях независимого возбуждения обмотка возбуждения питается от отдельного источника.
 |
Схемы ДПТ с различными типами возбуждения: а – параллельным; б – последовательным;
в – смешанным
Основными уравнениями двигателя постоянного тока являются:
уравнение электромагнитного момента;
уравнение цепи якоря;
М = Jdω/dt + Мс
Важную роль в анализе двигателей играет механическая характеристика – зависимость частоты вращения nот момента Mна валу при U, Iв = const.
ДПТ с независимым и параллельным возбуждением имеют общее свойство: ток возбуждения не зависит от тока якоря. Пренебрегая реакцией якоря, можно считать, что и поток Ф у них не зависит от нагрузки (момента Мс). Поэтому свойства и характеристики этих ДПТ идентичны, далее будем упоминать только ДПТ с параллельным возбуждением.
Из уравнений противоЭДС и цепи якоря выражаем частоту вращения якоря:
Выразив Iя из формулы электромагнитного момента получаем механическую характеристику ДПТ с параллельным возбуждением:
которая получена из статических уравнений и задает связь между n и M в установившемся режиме (при M = Mс). Механическую характеристику называют естественной, если она получена для двигателей без реостатов в цепях якоря и возбуждения при U = Uном, Ф = Фном. Естественная характеристика является прямой. В режиме холостого хода M = Mс= 0, поэтому первое слагаемое в определяет частоту идеального холостого хода
 .
.
В момент пуска двигателя n = 0 и пусковой момент
 .
.
У двигателей средней и большой мощности сопротивление якорной обмотки Rя мало (десятые и сотые доли Ом), пусковой момент велик, а коэффициент Kн мал. Естественная характеристика имеет малый наклон, поэтому с изменением нагрузки частота n изменяется незначительно. Характеристики такого типа называют «жесткими».
На рис. приведена механическая характеристика n = f(Mс) механизма на валу ДПТ. В установившемся режиме M = Mс, рабочая точка А лежит на пересечении характеристик. Обычно точку номинального режима организуют близко к точке холостого хода: n0 – nном = 3¸7% от n0.
Двигатели с последовательным возбуждением. Для получения механической характеристики полагаем, что в цепях возбуждения и якоря реостаты отсутствуют и Iя = Iв. При слабо насыщенной магнитной цепи можно допустить, что Ф ≈ KIв = KIя, где K = const. Подставив Ф в, получим M = CмKIя 2 ; Iя = . Выразив n и подставив Iя, получим
 Механическая характеристика ДПТ с последовательным воз буждением Механическая характеристика ДПТ с последовательным воз буждением |
Механическая характеристика ДПТ с последовательным возбуждением нелинейна, является «мягкой», что свидетельствует об очень большом пусковом моменте. Из характеристики видно, что запрещается работа (пуск) двигателя без нагрузки (Mс= 0) или с очень малой нагрузкой (Mс
Источник
3.5. Механические характеристики двигателя постоянного тока при различных способах возбуждения
Механической характеристикой называется зависимость между вращающим моментом и частотой вращения М = f(n) или n = f(M). Поскольку М ≡ Iя, иногда удобно пользоваться электромеханической характеристикой n = f(Iя).
В двигателях с независимым и параллельным возбуждением механическая характеристика представляет собой прямую линию и может быть построена по двум точкам (рис. 3.3). Такая характеристика, при которой частота вращения меняется незначительно (менее 0% от nном) при изменении
момента сопротивления нагрузки на валу 0 2 , (3.7)
В двигателях с последовательным возбуждением обмотка возбуждения соединяется последовательно с обмоткой якоря и по ней протекает ток возбуждения, равный току якоря Iв = Iя.
Магнитный поток Ф ≡ Iя. Заменим Ф через kIя, где k – коэффициент пропорциональности.
 ;
;  ;
;  . (3.8)
. (3.8)
Тогда уравнение механической характеристики примет вид
 (3.9)
(3.9)
Характеристика мягкая и не имеет пересечения с осью n (рис. 3.4). Это значит, что двигатель с последовательным возбуждением боится х. х. (двигатель идет в «разнос»).
Мягкой характеристикой называется механическая характеристика, при которой частота вращения двигателя сильно изменяется в зависимости от изменения величины нагрузки на валу.
Двигатели с последовательным возбуждением широко применяются на электротранспорте и в крановых установках.
В двигателях смешанного возбуждения на каждом полюсе имеются по две катушки: одна принадлежит параллельной, другая – последовательной обмотке возбуждения. Создаваемые ими магнитные потоки складываются из трех потоков:
Механическая характеристика имеет вид (рис. 3.5). Такие машины применяются там, где требуется большой пусковой момент и возможны кратковременные перегрузки и большие ускорения: компрессоры, прокатные станы, шагающие экскаваторы, строгальные станки.
3.6. Потери энергии и кпд машин постоянного тока
Работа любой электрической машины сопровождается различного рода потерями энергии в ней, вызывающими нагрев машины. В машине постоянного тока при номинальной нагрузке электрические потери ∆Pэ составляют примерно 50% всех потерь, ∆Pэ = f( ) и называются переменными.
) и называются переменными.
Другими потерями являются так называемые постоянные потери ∆Pпост, в которые входят потери в стали ∆Рст (1–3% от Рном), потери механические на трение в подшипниках и вентиляционные ∆Рмех (1–2% от Рном) и потери в обмотке возбуждения ∆Рв (0,5–0,7% от Рном). Все эти потери практически не зависят от нагрузки двигателя.
Коэффициент полезного действия
В паспорте двигателя указывается полезная мощность, отдаваемая рабочему механизму Рном = Р2ном.
Потребляемая номинальная мощность
Зная Р1ном, легко определить номинальный ток двигателя
а зная Р2ном легко определить номинальный вращающий момент:
Источник
Механическая характеристика двигателя постоянного тока независимого возбуждения (ДПТ НВ)
![]()
![]()
Уравнение механической характеристики двигателя постоянного тока независимого возбуждения имеет вид:
где: n0 — частота вращения вала двигателя при холостом ходе. Δn — изменение частоты вращения двигателя под действием механической нагрузки.
Из этого уравнения следует, что механические характеристики двигателя постоянного тока независимого возбуждения (ДПТ НВ) прямолинейны и пересекают ось ординат в точке холостого хода n0 (рис 13.13 а), при этом изменение частоты вращения двигателя Δn, обусловленное изменением его механической нагрузки, пропорционально сопротивлению цепи якоря Rа = ∑R + Rдоб. Поэтому при наименьшем сопротивлении цепи якоря Rа = ∑R, когда Rдоб = 0, соответствует наименьший перепад частоты вращения Δn. При этом механическая характеристика становится жесткой (график 1).
Механические характеристики двигателя, полученные при номинальных значениях напряжения на обмотках якоря и возбуждения и при отсутствии добавочных сопротивлений в цепи якоря, называют естественными (график 7).
Если же хотя бы один из перечисленных параметров двигателя изменен (напряжение на обмотках якоря или возбуждения отличаются от номинальных значений, или же изменено сопротивление в цепи якоря введением Rдоб), то механические характеристики называют искусственными.
Искусственные механические характеристики, полученные введением в цепь якоря добавочного сопротивления Rдоб, называют также реостатными (графики 7, 2 и 3).
При оценке регулировочных свойств двигателей постоянного тока наибольшее значение имеют механические характеристики n = f(M). При неизменном моменте нагрузки на валу двигателя с увеличением сопротивления резистора Rдоб частота вращения уменьшается. Сопротивления резистора Rдоб для получения искусственной механической характеристики, соответствующей требуемой частоте вращения n при заданной нагрузке (обычно номинальной) для двигателей независимого возбуждения:
где U — напряжение питания цепи якоря двигателя, В; Iя — ток якоря, соответствующий заданной нагрузке двигателя, А; n — требуемая частота вращения, об/мин; n0 — частота вращения холостого хода, об/мин.
Частота вращения холостого хода n0 представляет собой пограничную частоту вращения, при превышении которой двигатель переходит в генераторный режим. Эта частота вращения превышает номинальную nном на столько, на сколько номинальное напряжение Uном подводимое к цепи якоря, превышает ЭДС якоря Ея ном при номинальной нагрузки двигателя.

На форму механических характеристик двигателя влияет величина основного магнитного потока возбуждения Ф. При уменьшении Ф (при возрастании сопротивления резистора rpeг) увеличивается частота вращения холостого хода двигателя n0 и перепад частоты вращения Δn. Это приводит к значительному изменению жесткости механической характеристики двигателя (рис. 13.13, б). Если же изменять напряжение на обмотке якоря U (при неизменных Rдоб и Rрег), то меняется n0, a Δn остается неизменным [см. (13.10)].
В итоге механические характеристики смещаются вдоль оси ординат, оставаясь параллельными друг другу (рис. 13.13, в). Это создает наиболее благоприятные условия при регулировании частоты вращения двигателей путем изменения напряжения U, подводимого к цепи якоря. Такой метод регулирования частоты вращения получил наибольшее распространение еще и благодаря разработке и широкому применению регулируемых тиристорных преобразователей напряжения. 
Механическая характеристика двигателя при неизменных параметрах U, R и Ф представляется прямой линией 1 (рис. 4.2).
На холостом ходу (М = 0) двигатель вращается с частотой вращения w0. По мере увеличения момента нагрузки частота вращения снижается, номинальному моменту нагрузки МН соответствует номинальная частота вращения w0. Изменение величины питающего напряжения вызывает пропорциональное уменьшение частот вращения во всех режимах работы. При этом жесткость механической характеристикиb сохраняется, так как его величина, согласно (4.5б), определяется сопротивлением якорной цепи, конструктивным коэффициентом и магнитным потоком машины.

Согласно (4.5), путем изменения величины питающего напряжения U от нуля до номинального значения (например, при помощи управляемого тиристорного выпрямителя), можно изменять частоту вращения вала в широких пределах, что подтверждается рис. 4.2 (характеристиками 2). При этом диапазон плавного и экономичного регулирования частоты вращения – глубина регулирования – находится по формуле:
где wmax, wmin – максимально и минимально возможные частоты вращения при данном способе регулирования.
Практически значение глубины регулирования достигает 10…100 тыс. Столь большой диапазон регулирования позволяет исключить или значительно упростить механическую трансмиссию.
Вторым способом регулирования частоты вращения двигателя является изменение сопротивления якорных цепей – путём включения последовательно в цепь якоря регулировочного резистора RР1 (рис. 4.1). В этом случае, согласно (4.5), при увеличении сопротивления жесткость характеристики машины уменьшается (рис. 4.2, линии 3). Как видно из рис. 4.2, частота вращения машины при идеальном холостом ходе: М = 0 не изменяется, а с ростом момента нагрузки частота вращения снижается значительно (β уменьшается). Данный способ регулирования позволяет изменять частоту вращения в значительном диапазоне, однако вследствие значительных потерь мощности в регулировочном резисторе резко снижается кпд привода:
 . (4.7)
. (4.7)
Регулирование частоты вращения машины постоянного тока магнитным потоком машины Ф – за счёт изменения тока возбуждения резистором RР2 (см. рис. 4.1) – является экономичным способом, так как потери в резисторе RР2 не велики вследствие малого тока возбуждения. Однако этот способ позволяет лишь увеличивать частоту вращения по сравнению с номинальной (глубина регулирования не превышает D = 2…3). Такой способ регулирования предусмотрен для большинства машин.
13 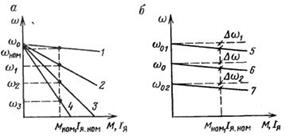
При способе регулирование угловой скорости двигателей постоянного тока независимого возбуждения осуществляется изменением величины магнитного потока за счет введения в цепь обмотки возбуждения дополнительного реостата. При ослаблении потока угловая скорость двигателя как при нагрузке, так и при холостом ходе возрастает, а при усилении потока — уменьшается. Практически возможно изменение скорости только в сторону увеличения ввиду насыщения двигателя.
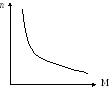
При увеличении скорости ослаблением потока допустимый момент двигателя постоянного тока изменяется по закону гиперболы, а мощность остается постоянной. Диапазон регулирования скорости для данного способа D = 2 — 4.
Механические характеристики для различных значений потока двигателя приведены на рис. 2, а и 2, б, из которых видно, что характеристики в пределах номинального тока имеют высокую степень жесткости.
Обмотки возбуждения двигателей постоянного тока независимого возбуждения обладают значительной индуктивностью. Поэтому при ступенчатом изменении сопротивления реостата в цепи обмотки возбуждения ток, а следовательно, и поток будут изменяться по экспоненциальному закону. В связи с этим регулирование угловой скорости будет осуществляться плавно.
Существенными преимуществами данного способа регулирования скорости являются его простота и высокая экономичность.
Данный способ регулирования используют в приводах в качестве вспомогательного, обеспечивающего повышение скорости при холостом ходе механизма.
Для получения простейшей модели электропривода постоянного тока, описывающей установившиеся (статические) режимы и позволяющей получить основные характеристики, воспользуемся схемой на рис. 3.1.
Будем полагать, что якорная цепь питается от независимого источника с напряжением U* , сопротивление цепи якоря R постоянно, магнитный поток Ф определяется лишь током возбуждения и не зависит от нагрузки (реакция якоря не проявляется), индуктивные параметры цепей пока не учитываются, поскольку рассматриваются лишь установившиеся (статические) режимы.
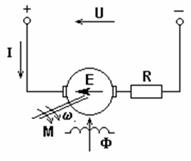
Рис. 3.1. Схема электропривода с двигателем постоянного тока
Взаимодействие тока I в обмотке якоря с магнитным потоком Ф, создаваемым обмотками, расположенными на полюсах машины, приводит в соответствии с законом Ампера и возникновению электромагнитных сил, действующих на активные проводники обмотки и, следовательно, электромагнитного момента М:
где k— конструктивный параметр машины.
В движущихся с угловой скоростью  в магнитном поле под действием момента М проводниках обмотки якоря в соответствии с законом Фарадея наводится ЭДС вращения Е:
в магнитном поле под действием момента М проводниках обмотки якоря в соответствии с законом Фарадея наводится ЭДС вращения Е:
E = kФw , (3.2) направленная в рассматриваемом случае встречно по отношению к вызвавшей движение причине – ЭДС источника питания U.
В соответствие со вторым законом Кирхгоффа для якорной цепи машины справедливо уравнение:
Уравнения (3.1)-(3.3) – простейшая, но достаточная для понимания главных процессов в электроприводе постоянного тока модель. Для решения практических задач они должны быть дополнены уравнением движения с моментом потерь  , входящим в Мс,
, входящим в Мс,
и уравнениями цепи возбуждения для конкретной схемы электропривода.
Разумеется, в условиях каждой задачи должно быть строго оговорено, что задано и известно, а что нужно искать.
Рассмотрим подробнее роль, которую играет ЭДС Е в процессе преобразования энергии, осуществляемом электрической машиной. Если существовал некоторый установившийся режим М1 = Мс1, а затем Мсизменился, например, возрос до величины Мс2, то для получения нового установившегося режима необходимо иметь средство, которое изменило бы М, приведя его в соответствие с новым значением Мс. В двигателе внутреннего сгорания эту роль выполнит оператор, увеличив подачу топлива; в паровой турбине – специальный регулятор, который увеличит подачу пара. В электрической машине эту роль выполнит ЭДС. Действительно, при возрастании Мс скорость двигателя начнет снижаться, значит уменьшится в соответствии с (3.2) и ЭДС (полагаем для простоты, что Ф, а также U и R – постоянные). Из (3.3) следует, что
 ,
,
следовательно, ток вырастет, обусловив тем самым рост момента в соответствии с (3.1). Двигатель автоматически, без каких-либо внешних воздействий перейдет в новое установившееся состояние. Эти процессы будут иметь место при любых величинах и знаках Мс, то есть ЭДС будет выполнять функцию регулятора как в двигательном, так и в тормозных режимах работы машины.
Характеристики и режимы при независимом возбуждении, U = const
При использовании в электроприводе постоянного тока двигателя с независимым возбуждением – рис. 3.2 с питанием от источника напряжения U=const уравнение электромеханической характеристикиw(I)получится подстановкой (3.2) в (3.3) и решением относительно  :
:
 (3.4)
(3.4)
Рис. 3.2. Схема двигателя постоянного тока независимого возбуждения
Механическую характеристику w(М) получим, подставив в (3.4) ток, выраженный из (3.1):
 . (3.5)
. (3.5)
При заданных U, Ф и R уравнения (3.4) и (3.5) однозначно определяют связь между  , I и М в любых режимах. Характеристики
, I и М в любых режимах. Характеристики  и
и  это прямые линии, проходящие через две характерные точки: М = 0,
это прямые линии, проходящие через две характерные точки: М = 0,  и w = 0, I = Iкз, М = Мкз; при Ф = const они различаются лишь масштабами по оси абсцисс.
и w = 0, I = Iкз, М = Мкз; при Ф = const они различаются лишь масштабами по оси абсцисс.
Скорость  (рис. 3.3) соответствует режиму идеального холостого хода: М = 0, E = U и направлены встречно.
(рис. 3.3) соответствует режиму идеального холостого хода: М = 0, E = U и направлены встречно.
Рис. 3.3. Механические (электромеханические) характеристики электропривода
постоянного тока независимого возбуждения при U = const
Величина  – перепад скорости под влиянием нагрузки.
– перепад скорости под влиянием нагрузки.
Увеличением нагрузки при определенных условиях, которые рассматриваются ниже, можно прийти к режиму короткого замыкания:  ,
,  , M = k ФIкз = Mкз.
, M = k ФIкз = Mкз.
При изменении полярности U характеристика займет положение, показанное на рис. 3.3 пунктиром.
Участки характеристики между w0 и Мкз, где знаки w и М совпадают, соответствуют, как было условлено ранее, двигательному режиму работы; участки с разными знаками  и М – тормозным режимам.
и М – тормозным режимам.
Тормозные режимы – это генераторные режимы, поскольку механическая энергия, поступившая с вала машины, преобразуется в электрическую и передается через электрические зажимы машины. В зависимости от того, куда поступает электрическая энергия, различают три тормозных режима.
а) Торможение с отдачей энергии в сеть (рекуперативное) или генераторный режим работы параллельно с сетью.
Если якорь двигателя вращать от некоторого постороннего источника со скоростью, превышающей скорость идеального холостого хода, то ЭДС двигателя будет больше приложенного напряжения, в результате чего ток в якоре двигателя и момент изменят свой знак. Механическая энергия, поступающая при этом на вал двигателя, преобразуется в электрическую и за вычетом потерь в двигателе рекуперируется в сеть.
На механических характеристиках торможению с отдачей энергии в сеть соответствуют участки ab и a’b’ (рис. 3.3)
б) Торможение противовключением или генераторный режим работы последовательно с сетью.
В режиме противовключения изменяет знак скорость двигателя при сохранении знака момента или знак момента двигателя при сохранении знака скорости.
Первый случай имеет место при воздействии активного момента статической нагрузки, превышающего момент короткого замыкания на данной характеристике.
В результате изменения знака скорости ЭДС двигателя будет совпадать с приложенным напряжением, и ток в якоре определится выражением:

Второй случай используется для остановки двигателя путем изменения полярности напряжения, подводимого к его якорю.
Вследствие механической инерции скорость двигателя и ЭДС в начальный момент сохраняются неизменными, а ток будет равен:

На механических характеристиках (рис. 3.3) торможению противовключением соответствуют участки cd и c’d’.
В режиме торможения противовключением энергии поступает в привод и со стороны механизма, и от сети и рассеивается в сопротивлениях якорной цепи; в предыдущем случае энергия, поступающая от механизма, передавалась в сеть.
в) Динамическое торможение или генераторный режим работы независимо от сети.
Если якорная цепь отключена от источника питания и замкнута на внешний резистор, то при вращении двигателя от внешнего источника или по инерции в якорной цепи индуцируется ЭДС и протекает ток  , создающий момент. Характеристики проходят через начало координат – штрих-пунктир на рис. 3.3.
, создающий момент. Характеристики проходят через начало координат – штрих-пунктир на рис. 3.3.
Характеристики и режимы при независимом возбуждении, I = const
В ряде применений якорная цепь двигателя постоянного тока независимого возбуждения питается не от источника напряжения, как в предыдущем случае, а от источника тока (I = const) – рис. 3.4. При этом, естественно, сохраняют силу фундаментальные соотношения (3.1)-(3.3), однако свойства электропривода радикально изменяются.
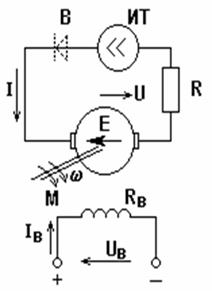
Рис. 3.4. Схема двигателя постоянного тока независимого возбуждения
при питании от источника тока
Электромеханическая  и механическая
и механическая  характеристики представлены теперь вертикальными прямыми (рис. 3.5) I = const (3.6) М = kФI = const (3.7) и привод приобретает новое свойство “источника момента”. Это связано с тем, что источник питания – источник тока – нейтрализует действие ЭДС, она теперь уже не играет роли внутреннего регулятора и не влияет на скорость. В свою очередь, напряжение U становится зависимой переменной U = E + IR = kФw+ IR, (3.8) и характеристика
характеристики представлены теперь вертикальными прямыми (рис. 3.5) I = const (3.6) М = kФI = const (3.7) и привод приобретает новое свойство “источника момента”. Это связано с тем, что источник питания – источник тока – нейтрализует действие ЭДС, она теперь уже не играет роли внутреннего регулятора и не влияет на скорость. В свою очередь, напряжение U становится зависимой переменной U = E + IR = kФw+ IR, (3.8) и характеристика  (рис. 3.5) определяет энергетические режимы работы электропривода.
(рис. 3.5) определяет энергетические режимы работы электропривода.
Рис. 3.5. Характеристики электропривода при питании якоря от источника тока
Режима идеального холостого хода в рассматриваемой структуре нет – “источник момента”.
Двигательный режим соответствует участку ab в I квадранте: Мw> 0, т.е. механическая энергия поступает к потребителю – технологической машине, UI > 0 – электрическая энергия поступает к своему потребителю – двигателю.
Режим короткого замыкания – точка a, здесь Е = 0 и U = IR.
На участке ac Мw 0 – электрическая энергия от источника тока также поступает в якорную цепь. Этот режим мы определили раньше как торможение противовключением.
В точке с U = 0 – режим динамического торможения: вся поступившая механическая энергия рассеивается в сопротивлениях якорной цепи.
И, наконец, на участке cd Мw ω о.ид. В этом случае ЭДС якоря Eя > Uя (см. (5.6) и (5.38)), ток якоря меняет направление, машина переходит в генераторный режим и электромагнитный момент становится тормозным. Механической характеристикой в режиме рекуперативного торможения является продолжение механической характеристики двигателя во II квадранте (ω>0, Mэм 2 . Механические характеристики тормозного режима расположены во II квадранте плоскости Мэм,ω (рис. 5.22, б, Rд2>Rд3).
В момент переключения двигатель переходит из точки А естественной характеристики двигательного режима 1 в точку В характеристики тормозного режима 2, момент Мэм меняет знак и начинается динамическое торможение. Угловая скорость уменьшается, но при этом довольно резко уменьшается и тормозной момент (переход из точки В в С). С целью увеличения тормозного момента производится уменьшение добавочного сопротивления Rд (переход из точки С в точку D). Торможение происходит до нулевой скорости.
Современные системы электроприводов крановых механизмов выполняются в основном с применением асинхронных двигателей, скорость которых регулируется релейно-контакторным способом путем введения сопротивлений в цепь ротора. Такие электроприводы обладают малым диапазоном регулирования скорости, а при пусках и торможениях создают большие рывки и ускорения, что плохо влияет на работу конструкции крана, ведет к раскачиванию груза и ограничивает применение таких систем на кранах повышенной высоты и грузоподъемности.
Развитие силовой полупроводниковой техники позволяет вносить принципиально новые решения в структуру автоматизированного электропривода крановых установок. В настоящее время на механизмах подъема и передвижения башенных и мостовых кранов применяется регулируемый электропривод с двигателями постоянного тока, питаемыми от мощных тиристорных преобразователей, — система ТП — Д.
Скорость двигателя в таких системах регулируется в диапазоне (20 ÷ 30) : I путем изменения напряжения на якоре. При этом в переходных процессах система обеспечивает получение ускорений и рывков в пределах заданных норм.
Хорошие регулировочные качества появляются и у асинхронного электропривода при включении тиристорного преобразователя в цепь статора асинхронного двигателя (АД). Изменение напряжения на статоре двигателя в замкнутой САУ позволяет ограничить пусковой момент, получить плавный разгон (торможение) привода и необходимый диапазон регулирования скорости.
Применение тиристорных преобразователей в автоматизированном электроприводе крановых механизмов находит все большее применение в отечественной и зарубежной практике. Для ознакомления с принципом действия и возможностями таких установок остановимся кратко на двух вариантах схем управления двигателями постоянного и переменного токов.
На рис. 1 изображена принципиальная схема тиристорного управления двигателем постоянного тока независимого возбуждения для механизма подъема мостового крана. Якорь двигателя питается от реверсивного тиристорного преобразователя, который состоит из силового трансформатора Тр, служащего для согласования напряжений преобразователя и нагрузки, двух групп тиристоров Т1-Т6 и Т7-Т12, соединенных по трехфазной мостовой встречно-параллельной схеме, уравнительных реакторов 1УР и 2УР, являющихся одновременно сглаживающими реакторами, выполненными ненасыщающимися.
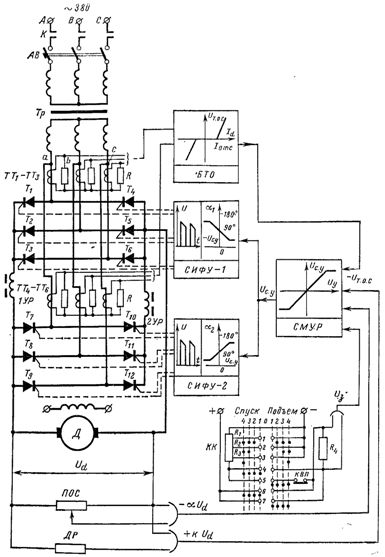
Рис. 1. Схема кранового электропривода по системе ТП-Д.
Группа тиристоров Т1-Т6 работает выпрямителем при подъеме и инвертором — при спуске тяжелых грузов, так как направление тока в якорной цепи двигателя для этих режимов одинаково. Вторая группа тиристоров Т7-Т12, обеспечивающая противоположное направление тока якоря, работает выпрямителем при силовом спуске и в переходных режимах пуска двигателя на тормозной спуск, инвертором — при торможении в процессе подъема грузов или крюка.
В отличие от механизмов передвижения кранов, в которых тиристорные группы должны быть одинаковыми, в механизмах подъема мощность тиристоров второй группы может быть взята меньшей, чем первой, так как ток двигателя при силовом спуске значительно меньше, чем при подъеме и спуске тяжелых грузов.
Регулирование выпрямленного напряжения тиристорного преобразователя (ТП) осуществляется с помощью полупроводниковой системы импульсно-фазового управления, состоящий из двух блоков СИФУ-1 и СИФУ-2 (рис. 1), каждый из которых подает на соответствующий тиристор по два отпирающих импульса, сдвинутых на 60°.
С целью упрощения системы управления и повышения надежности электропривода в данной схеме применяется согласованное управление реверсивным ТП. Для этого регулировочные характеристики и системы управления обеими группами должны быть жестко связаны. Если на тиристоры Т1-Т6 подаются отпирающие импульсы, обеспечивающие выпрямительный режим работы этой группы, то на тиристоры Т7-Т12 отпирающие импульсы подаются так, чтобы эта группа была подготовлена к работе инвертором.
Углы регулирования α1 и α2 при любых режимах работы ТП должны изменяться таким образом, чтобы среднее напряжение выпрямительной группы не превышало напряжение инверторной группы, т. е. Если это условие не соблюдается, то между двумя группами тиристоров будет протекать выпрямленный уравнительный ток, который дополнительно загружает вентили и трансформатор и может также привести к срабатыванию защиты.
Однако и при правильном согласовании углов управления α1 и α2 тиристорами выпрямительной и инверторной групп возможно протекание переменного уравнительного тока вследствие неравенства мгновенных значений напряжений UαB и UαI . Для ограничения этого уравнительного тока служат уравнительные реакторы 1УР и 2УР.
По одному из реакторов всегда проходит ток якоря двигателя, благодаря чему уменьшаются пульсации этого тока, а сам реактор частично насыщается. Второй реактор, по которому в данный момент протекает только уравнительный ток, остается ненасыщенным и ограничивает iyp.
Тиристорный электропривод крана имеет одноконтурную систему управления (СУ), выполненную с использованием быстродействующего реверсивного суммирующего магнитного усилителя СМУР, который питается от генератора прямоугольного напряжения частотой 1000 Гц. При наличии токовой отсечки такая СУ позволяет получить удовлетворительные статические характеристики и высокое качество переходных процессов.
Система управления электроприводом содержит отрицательные обратные связи по напряжению и току двигателя с отсечками, а также слабую положительную обратную связь по напряжению Ud. Сигнал в цепи задающих обмоток СМУР определяется разностью задающего напряжения Uз, поступающего с резистора R4, и напряжения обратной связи αUd, снимаемого с потенциометра ПОС. Значение и полярность задающего сигнала, определяющего скорость и направление вращения привода, регулируются с помощью командоконтроллера КК.
Отсечка обратной связи по напряжению Ud осуществляется с помощью кремниевых стабилитронов, включенных параллельно задающим обмоткам СМУР. Если разница напряжений Ud-aUd будет больше Uст.н, то стабилитроны проводят ток, и напряжение на обмотках управления становится равным Uз. макс = Uст.н.
С этого момента изменение сигнала aUd в сторону уменьшения не сказывается на токе в задающих обмотках СМУР, т. е. отрицательная обратная связь по напряжению Ud не действует, что обычно имеет место при токах двигателя Id > (1,5÷1,8) Id.н.
Если сигнал обратной связи aUd приближается к задающему сигналу Uз, то напряжение на стабилитронах становится меньше Uст.н, и ток через них не проходит. Ток в задающих обмотках СМУР будет определяться разностью напряжений U3-aUd, и отрицательная обратная связь по напряжению при этом вступает в работу.
Сигнал отрицательной обратной связи по току снимается с двух групп трансформаторов тока ТТ1-ТТ3 и ТТ4-ТТ8, работающих соответственно с группами тиристоров Т1-Т6 и Т7-Т12. В блоке токовой отсечки БТО получаемое на резисторах R трехфазное переменное напряжение U2TT ≡ Id выпрямляется, и через стабилитроны, выполняющие роль напряжения сравнения, сигнал Uт.о.с подается на токовые обмотки СМУР, понижая результирующий сигнал на входе усилителя. Это уменьшает напряжение Ud преобразователя и ограничивает ток Id цепи якоря в статических и динамических режимах.
Для получения высокого коэффициента заполнения механических характеристик ω = f(М) электропривода и поддержания постоянства ускорения (замедления) в переходных режимах дополнительно к перечисленным выше связям в схеме применяется положительная обратная связь по напряжению.
Коэффициент усиления этой связи выбирается kп.н = 1/kпр ≈ ΔUy/ΔUd. в соответствии с начальным участком характеристики Ud = f (Uy) преобразователя, но на порядок меньше коэффициента α отрицательной обратной связи по Ud. Действие этой связи в основном проявляется в зоне токовой отсечки, обеспечивая получение крутопадающих участков характеристики.
На рис. 2, а изображены статические характеристики привода подъема для различных значений задающего напряжения U3, соответствующих различным положениям командоконтроллера.
В первом приближении можно принять, что в переходных режимах пуска, реверса и торможения рабочая точка в координатных осях ω = f(М) перемещается по статической характеристике.
Тогда ускорение системы:
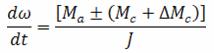
где ω — угловая скорость, Мa — момент, развиваемый двигателем, Мс — момент сопротивления перемещаемого груза, ΔМc — момент потерь в передачах, J — приведенный к валу двигателя момент инерции.
Если пренебречь потерями в передачах, то условием равенства ускорения при пуске двигателя на подъем и спуск, а также при торможении с подъема и со спуска является равенство динамических моментов электропривода, т. е. Мдин.п = Мдин.с. Для выполнения этого условия статические характеристики привода подъема должны быть несимметричными относительно оси скорости (Мстоп.п > Мстоп.с) и иметь крутой фронт в области стопорного значения момента (рис. 2, а).
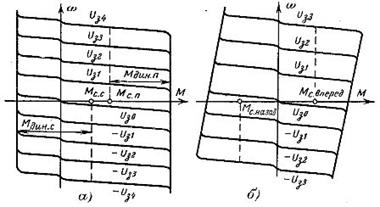
Рис. 2. Механические характеристики электропривода по системе ТП-Д: а — механизм подъема, б — механизм передвижения.
Для приводов механизмов передвижения крана следует учитывать реактивный характер момента сопротивления, который не зависит от направления движения. При одном и том же значении момента двигателя реактивный момент сопротивления будет замедлять процесс пуска и ускорять процесс торможения привода.
Для устранения этого явления, которое может привести к пробуксовыванию ведущих колес и быстрому износу механических передач, необходимо поддерживать примерно постоянными ускорения в процессе пуска, реверса и торможения в механизмах передвижения. Это достигается получением статических характеристик ω = f (М), приведенных на рис. 2, б.
Указанные разновидности механических характеристик электропривода можно получить путем соответствующего изменения коэффициентов отрицательной обратной связи по току Id и положительной связи по напряжению Ud.
Полная схема управления автоматизированного электропривода мостового крана с тиристорным управлением включает в себя все блокировочные связи и защитные цепи, которые рассмотрены в приведенных ранее схемах.
При применении ТП в электроприводе крановых механизмов следует обратить внимание на их электроснабжение. Значительная несинусоидальность потребляемого преобразователями тока вызывает искажение формы напряжения на входе преобразователя. Эти искажения влияют на работу силовой части преобразователя и системы импульсно-фазового управления (СИФУ). Искажение формы напряжения питающей сети вызывает значительное недоиспользование электродвигателя.
Искажение формы питающего напряжения оказывает сильное влияние на СИФУ, особенно при отсутствии входных фильтров. В отдельных случаях эти искажения могут привести к произвольному полному открыванию тиристоров. Наилучшим способом это явление можно устранить путем питания СИФУ от отдельных троллеев, подключенных к трансформатору, не имеющему выпрямительной нагрузки.
Возможные способы использования тиристоров для регулирования скорости асинхронных двигателей весьма разнообразны — это тиристорные преобразователи частоты (автономные инверторы), тиристорные регуляторы напряжения, включаемые в цепь статора, импульсные регуляторы сопротивлений и токов в цепях двигателя и т. д.
В крановых электроприводах находят применение главным образом тиристорные регуляторы напряжения и импульсные регуляторы, что обусловлено их относительной простотой и надежностью. Однако использование каждого из указанных регуляторов в отдельности не позволяет полностью обеспечить требования, предъявляемые к электроприводам крановых механизмов.
Действительно, при использовании только лишь импульсного регулятора сопротивления в цепи ротора асинхронного двигателя удается обеспечить зону регулирования, ограниченную естественной и соответствующей полному сопротивлению реостатной механическими характеристиками, т. е. зона регулирования соответствует двигательному режиму и режиму противовключения с неполным заполнением I и IV или III и II квадрантов плоскости механических характеристик.
Применение тиристорного регулятора напряжения, особенно реверсивного, принципиально обеспечивает зону регулирования скорости, покрывающую всю рабочую часть плоскости М, ω от —ωн до + ωн и от — Мк до +Мк. Однако при этом будут иметь место значительные потери скольжения в самом двигателе, что приводит к необходимости существенного завышения его установленной мощности, а следовательно, и его габаритов.
В связи с этим для крановых механизмов создаются системы асинхронного электропривода, в которых управление двигателем осуществляется путем сочетания импульсного регулирования сопротивления в роторе и изменения напряжения, подводимого к статору. Этим достигается заполнение всех четырех квадрантов механических характеристик.
Принципиальная схема такого комбинированного управления приведена на рис. 3. В роторную цепь включена схема импульсного регулирования сопротивления в цепи выпрямленного тока. Параметры схемы выбраны такими, что она обеспечивает работу двигателя в I и III квадрантах в зонах между реостатными и естественными характеристиками (на рис. 4 заштрихованы вертикальными линиями).
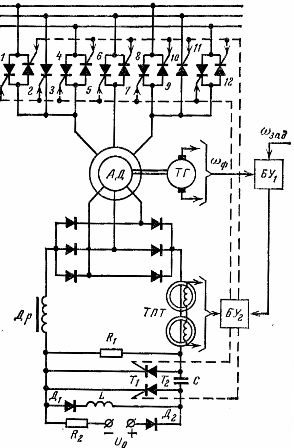
Рис. 3. Схема кранового электропривода с тиристорным регулятором напряжения статора и импульсным регулированием сопротивления ротора.
Для регулирования скорости в зонах между реостатными характеристиками и осью скоростей, заштрихованных горизонтальными линиями на рис. 4, а также для реверсирования двигателя используется тиристорный регулятор напряжения, состоящий из пар включенных встречно-параллельно тиристоров 1-2, 4-5, 6-7, 8-9, 11-12. Изменение напряжения, подводимого к статору, осуществляется путем регулирования угла открывания тиристорных пар 1-2, 6-7, 11-12 — для одного направления вращения и 4-5, 6-7, 8-9 — для другого направления вращения.
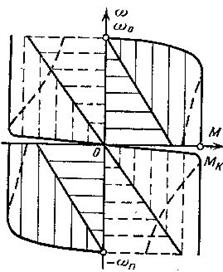
Рис. 4. Области регулирования при комбинированном управлении асинхронным двигателем.
Для получения жестких механических характеристик и ограничения моментов двигателя в схеме предусмотрены обратные связи по скорости и выпрямленному току ротора, осуществляемые тахогенератором ТГ и трансформатором постоянного тока (магнитным усилителем) ТПТ
Более просто можно получить заполнение всего I квадранта, включив конденсатор последовательно с сопротивлением R1 (рис. 3). В этом случае эквивалентное сопротивление в цепи выпрямленного тока ротора можно изменять в пределах от нуля до бесконечности и осуществлять таким образом регулирование тока в роторе от максимального значения до нуля.
Область регулирования скорости двигателя в такой схеме распространяется вплоть до оси ординат, однако величина емкости конденсатора при этом получается весьма значительной.
Для заполнения всего I квадранта при меньших значениях емкости сопротивление резистора R1 разбивают на отдельные ступени. В первую ступень, включаемую при небольших токах, последовательно вводят емкость. Выведение ступеней осуществляется импульсным методом с последующим закорачиванием каждой из них тиристорами или контакторами. Заполнение всего I квадранта можно получить также путем сочетания импульсного изменения сопротивления с импульсным режимом двигателя. Такая схема приведена на рис. 5.
В области между осью скоростей и реостатной характеристикой (рис. 4) двигатель работает в импульсном режиме. При этом на тиристор Т3 управляющие импульсы не поступают, и он остается все время закрытым. Схема, осуществляющая импульсный режим двигателя, состоит из рабочего тиристора Т1 вспомогательного тиристора Т2, коммутирующего конденсатора С и резисторов R1 и R2. При открытом тиристоре Т1 ток протекает через резистор R1. Конденсатор С заряжается до напряжения, равного падению напряжения на R1.
Когда подается управляющий импульс на тиристор Т2, напряжение конденсатора оказывается приложенным в обратном направлении к тиристору Т1 и закрывает его. Одновременно происходит перезаряд конденсатора. Наличие индуктивности двигателя приводит к тому, что процесс перезаряда конденсатора носит колебательный характер, вследствие чего тиристор Т2 закрывается самостоятельно без подачи управляющих сигналов, а цепь ротора оказывается разомкнутой. Затем подается управляющий импульс на тиристор Т1, и все процессы повторяются снова.
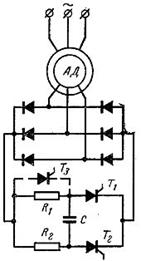
Рис. 5. Схема импульсного комбинированного управления асинхронным двигателем
Таким образом, при периодической подаче управляющих сигналов на тиристоры какую-то часть периода в роторе протекает ток, определяемый сопротивлением резистора R1. В другую часть периода цепь ротора оказывается разомкнутой, момент, развиваемый двигателем, равен нулю, а его рабочая точка находится на оси .скоростей. Изменяя относительную продолжительность включения тиристора Т1 в течение периода, можно получать среднее значение момента, развиваемого двигателем от нуля до максимального значения, соответствующего работе на реостатной характеристике при введении в цепь ротора R1
При использовании различных обратных связей можно получить характеристики желаемого вида в области между осью скоростей и реостатной характеристикой. Для перехода в область между реостатной и естественной характеристиками нужно, чтобы тиристор Т2 оставался все время закрытым, а тиристор Т1 — все время открытым. Путем закорачивания сопротивления R1 с помощью коммутатора с основным тиристором Т3 можно плавно изменять сопротивление в цепи ротора от значения R1 до 0, обеспечивая тем самым выход двигателя на естественную характеристику.
Импульсный режим двигателя с коммутацией в цепи ротора может быть осуществлен и в режиме динамического торможения. При использовании различных обратных связей можно получить в этом случае во II квадранте желаемые механические характеристики. С помощью логической схемы управления возможно осуществлять автоматический переход двигателя из одного режима к другому и получить заполнение всех квадрантов механических характеристик
Двигатель постоянного тока с последовательным возбуждением
Характерной особенностью ДПТ с ПВ является то, что его обмотка возбуждения (ПОВ) с сопротивлением  посредством щеточно-коллекторного узла последовательно соединена с обмоткой якоря с сопротивлением
посредством щеточно-коллекторного узла последовательно соединена с обмоткой якоря с сопротивлением  , т.е. в таких двигателях возможно только электромагнитное возбуждение.
, т.е. в таких двигателях возможно только электромагнитное возбуждение.
Принципиальная электрическая схема включения ДПТ с ПВ представлена на рис.3.1.
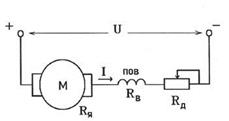
Рис. 3.1. Схема электрическая принципиальная включения ДПТ с ПВ.
Для осуществления пуска ДПТ с ПВ последовательно с его обмотками включается добавочный реостат  .
.
Уравнения электромеханической характеристики ДПТ с ПВ
Ввиду того, что в ДПТ с ПВ ток обмотки возбуждения равен току в обмотке якоря, в таких двигателях в отличие от ДПТ с НВ проявляются интересные особенности.
Поток возбуждения ДПТ с ПВ  связан с током якоря (он же является и током возбуждения)
связан с током якоря (он же является и током возбуждения)  зависимостью, называемой кривой намагничивания, представленной на рис. 3.2.
зависимостью, называемой кривой намагничивания, представленной на рис. 3.2.
Как видно зависимость 
 для малых токов близка к линейной, а с увеличением тока проявляется нелинейность, связанная с насыщением магнитной системы ДПТ с ПВ.
для малых токов близка к линейной, а с увеличением тока проявляется нелинейность, связанная с насыщением магнитной системы ДПТ с ПВ.
Уравнение электромеханической характеристики ДПТ с ПВ так же и для ДПТ с независимым возбуждением имеет вид:
 . (3.1)
. (3.1)
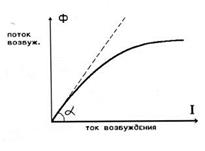
Рис. 3.2. Кривая намагничивания ДПТ с ПВ.
Из-за отсутствия точного математического описания кривой намагничивания, при упрощенном анализе можно пренебречь насыщением магнитной системы ДПТ с ПВ, т. е. принять зависимость между потоком и током якоря линейной, как это показано на рис. 3.2 пунктирной линией. В этом случае можно записать:
 , (3.2)
, (3.2)
где  — коэффициент пропорциональности.
— коэффициент пропорциональности.
Для момента ДПТ с ПВ с учетом (3.17) можно записать:
 . (3.3)
. (3.3)
Из выражения (3.3) видно, что в отличие от ДПТ с НВ у ДПТ с ПВ электромагнитный момент зависит от тока якоря не линейно, а квадратично.
Для тока якоря можно в этом случае записать:
 . (3.4)
. (3.4)
Если подставить выражение (3.4) в общее уравнение электромеханической характеристики (3.1), то можно получить уравнение для механической характеристики ДПТ с ПВ:
 , (3.5)
, (3.5)
где  ,
,  .
.
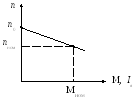
Отсюда следует, что при ненасыщенной магнитной системе механическая характеристика ДПТ с ПВ изображается (рис. 3.3) кривой, для которой ось ординат является асимптотой.
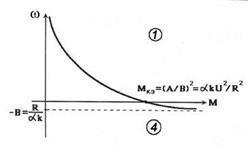
Рис. 3.3. Механическая характеристика ДПТ с ПВ в предположении ненасыщенности его магнитной цепи.
Значительное увеличение скорости вращения двигателя в области малых нагрузок обуславливается соответствующим снижением величины магнитного потока.
Уравнение (3.5) является оценочным, т.к. получено при допущении о ненасыщенности магнитной системы двигателя. На практике по экономическим соображениям электродвигатели рассчитываются с определенным коэффициентом насыщения и рабочие точки лежат в районе колена перегиба кривой намагничивания.
В целом, анализируя уравнение механической характеристики (3.5), можно сделать интегральный вывод о «мягкости» механической характеристики, проявляющейся в резком уменьшении скорости при увеличении момента на валу двигателя.
Если рассматривать механическую характеристику, изображенную на рис. 3.3 в области малых нагрузок на валу, то можно сделать вывод, что понятие скорости идеального холостого хода для ДПТ с ПВ отсутствует, т. е. при полном сбросе момента сопротивления двигатель идет в «разнос». При этом его скорость теоретически стремится к бесконечности.
С увеличением нагрузки скорость вращения падает и равняется нулю при значении момента короткого замыкания (пускового):
 . (3.6)
. (3.6)
Далее скорость вращения асимптотически приближается к значению  в 4 квадранте системы координат.
в 4 квадранте системы координат.
Как видно из (3.21) у ДПТ с ПВ пусковой момент при отсутствии насыщения пропорционален квадрату тока короткого замыкания. При конкретных расчетах пользоваться оценочным уравнением механической характеристики (3.5) нельзя. В этом случае построение характеристик приходится вести графо-аналитическими способами. Как правило, построение искусственных характеристик производится на основании данных каталогов, где приводятся естественные характеристики:  и
и  .
.
Реальный ДПТ с ПВ
В реальном ДПТ с ПВ вследствие насыщения магнитной системы но мере увеличения нагрузки на валу (а, следовательно, и тока якоря) в области больших моментов, наблюдается прямая пропорциональность между моментом и током, поэтому механическая характеристика становится там практически линейной. Это относится как к естественной, так и к искусственным механическим характеристикам.
Кроме того, в реальном ДПТ с ПВ даже в режиме идеального холостого хода существует остаточный магнитный поток  , вследствие чего скорость идеального холостого хода
, вследствие чего скорость идеального холостого хода  будет иметь конечную величину и определяться выражением:
будет иметь конечную величину и определяться выражением:
 . (3.7)
. (3.7)
Но так как величина  незначительна, то
незначительна, то  может достигать значительных величин. Поэтому у ДПТ с ПВ, как правило, запрещается сбрасывать нагрузку на валу более чем на 80% отноминальной.
может достигать значительных величин. Поэтому у ДПТ с ПВ, как правило, запрещается сбрасывать нагрузку на валу более чем на 80% отноминальной.
Исключением являются микродвигатели, у которых и при полном сбросе нагрузки остаточный момент трения достаточно велик для того, чтобы ограничить скорость холостого хода. Склонность ДПТ с ПВ идти в «разнос» ведет к тому, что их роторы выполняются механически усиленными.
Сравнение пусковых свойств двигателей с ПВ и НВ
Как следует из теории электрических машин, двигатели рассчитываются на конкретный номинальный ток  . При этом ток короткого замыкания не должен превышать значения
. При этом ток короткого замыкания не должен превышать значения
 , (3.8)
, (3.8)
где  — коэффициент перегрузки по току, который обычно лежит в диапазоне от 2 до 5.
— коэффициент перегрузки по току, который обычно лежит в диапазоне от 2 до 5.
В случае, если имеются два двигателя постоянного тока: один с независимым возбуждением, а второй с последовательным возбуждением, рассчитанные на одинаковый ток , то допустимый ток короткого замыкания  у них также будет одинаковым, в то время как пусковой момент у ДПТ с НВ будет пропорционален току якоря в первой степени:
у них также будет одинаковым, в то время как пусковой момент у ДПТ с НВ будет пропорционален току якоря в первой степени:
 ,
,
а у идеализированного ДПТ с ПВ согласно выражению (3.6) квадрату тока якоря;
 .
.
Из этого следует, что при одинаковой перегрузочной способности пусковой момент ДПТ с ПВ превосходит пусковой момент ДПТ с НВ.
Ограничение величины 

При прямом пуске двигателя ударные значения тока  , поэтому обмотки двигателя могут быстро перегреться и выйти из строя, кроме того большие токи негативно влияют и на надежность щеточно-коллекторного узла.
, поэтому обмотки двигателя могут быстро перегреться и выйти из строя, кроме того большие токи негативно влияют и на надежность щеточно-коллекторного узла.
(Оказанное обуславливает необходимость ограничения до какой-либо приемлемой величины либо введением в якорную цепь дополнительного сопротивления  , либо уменьшением питающего напряжения
, либо уменьшением питающего напряжения  .
.
Величина максимально допустимого тока определяется коэффициентом перегрузки  .
.
Для микродвигателей обычно осуществляется прямой пуск без добавочные сопротивлений, но с ростом габаритов ДПТ необходимо производить реостатный пуск. особенно, если привод с ДПТ с ПВ используется в нагруженных режимах с частыми пусками и торможениями.
Источник



