
- Методы импульсного регулирования постоянного напряжения
- 12. Импульсное регулирование постоянного напряжения
- 9. Принципы регулирования выходного напряжения полупроводниковых преобразователей частоты
- Основные сведения о частотно-регулируемом электроприводе
- Преимущества использования регулируемого электропривода в технологических процессах
- Структура частотного преобразователя
- Принцип работы преобразователя частоты
Методы импульсного регулирования постоянного напряжения
Импульсные преобразователи постоянного напряжения.
ИППН предназначены для изменения значения постоянного напряжения. Они служат для питания нагрузки постоянным напряжением UН, отличающиеся от напряжения источника питания Е. При этом иногда необходимо стабилизировать Uн при изменении Е и тока нагрузки или изменять Uн по определенному закону независимо от Е.
Выходное напряжение таких преобразователей характеризуется последовательностью импульсов прямоугольной формы с длительностью tи и паузой tп (рисунок 4.1), амплитуда которых близка к Е, а среднее значение выходного напряжения Uн.
В основе принципа действия ИППН лежит ключевой режим работы регулирующего полупроводникового прибора, осуществляющего периодическое подключение источника питания Е к выходной цепи преобразователя.
Регулирование выходного напряжения ИППН осуществляется импульсными методами путем изменения параметров выходных сигналов. Наибольшее применение нашли широтно-импульсный, частотно-импульсный методы и их комбинация.
Широтно-импульсный метод регулирования (ШИР) осуществляется изменением длительности (ширины) выходных импульсов tи при неизменном периоде их следования T=const; . Среднее значение выходного напряжения преобразователя при ШИР:
где — коэффициент регулирования.
В соответствии с этой формулой диапазон регулирования выходного напряжения ИППН с ШИР составляют от нуля (tи =0; γ=0) до Е (tи =T; γ=1).
Частотно-импульсное регулирование (ЧИР) производится за счет изменения частоты следования выходных импульсов при неизменной их длительности tи =const. Регулировочные возможности преобразователя характеризуются соотношением:
Выходному напряжению Е соответствует предельная частота следования импульсов, равная , а нулевому выходному напряжению .
Совместное преобразование ШИР и ЧИР заключается в изменении двух параметров выходных импульсов tи и и называется комбинированным.
Рассмотрим наиболее распространенные принципы построения схем ИППН (рисунок 4.2.а). Регулирующий элемент условно покажем в виде ключа, функцию которого обычно выполняет тиристор или силовой транзистор. В выходную цепь входит нагрузка Zн активно-индуктивного характера и при необходимости сглаживающий дроссель Lф. Иногда применяются более сложные сглаживающие фильтры, например Г — образный LC фильтр. Диод VD0 предназначен для создания контура протекания тока нагрузки при разомкнутом ключе К.
Рассмотрим процессы протекающие в таком преобразователе. На интервалах включенного состояния ключа t1-t2, t3-t4, t5-t6 напряжение подключается ко входу сглаживающего фильтра , Uвых=Е, диод VD0 закрыт. Через нагрузку протекает ток iн по цепи (+Е)-К- Lф-Zн –(-Е). На интервалах отключенного состояния ключа t2-t3, t4-t5 связь выходной цепи с источником питания отсутствует, однако ток через нагрузку продолжается. Он поддерживается энергией, накопленной реактивными элементами – дросселем Lф и индуктивностью нагрузки Lн и замыкается через VD0 вследствие чего Uвых=0. Без учета падений напряжения на активных сопротивлениях дросселя Lф и подводящих проводом Uн=Uвых , определяется средним значением Uвых(t) и находится по формулам 4.1 и 4.2. Ток iн состоит из участков экспонент нарастания и спадания с постоянной времени . Среднее значение тока .
При переходе к большим мощностям нагрузки (свыше 100кВт) возникают трудности в построении преобразователей по рассмотренной схеме. Они вызваны большими токами , и необходимостью применения большого числа параллельно включенных тиристоров. Кроме того, трудно осуществима конструкция дросселя с большой индуктивностью. ИППН большой мощности выполняют по многотактному принципу, основанному на параллельном включении Т-отдельных преобразователей, работающих на общую нагрузку от общего источника постоянного тока.
Нам важно ваше мнение! Был ли полезен опубликованный материал? Да | Нет
Источник
12. Импульсное регулирование постоянного напряжения
 Импульсное регулирование постоянного напряжения осуществляется при помощи импульсных преобразователей (прерывателей постоянного тока), включенных последовательно в цепь нагрузки (рис. 12.1). В зависимости от мощности нагрузки применяют транзисторные или тиристорные прерыватели (ТП).
Импульсное регулирование постоянного напряжения осуществляется при помощи импульсных преобразователей (прерывателей постоянного тока), включенных последовательно в цепь нагрузки (рис. 12.1). В зависимости от мощности нагрузки применяют транзисторные или тиристорные прерыватели (ТП).
Импульсный преобразователь или прерыватель постоянного тока предназначен для включения и отключения нагрузки, а также для непосредственного преобразования нерегулируемого напряжения источника постоянного тока в регулируемое. В качестве источника может быть применен аккумулятор, выпрямитель, генератор постоянного тока.
Среднее значение напряжения на нагрузке можно определить из соотношения:
где tи – длительность проводящего состояния преобразователя; tп – длительность непроводящего состояния преобразователя; Тк – период коммутации; fк = 1/ Тк – частота коммутации; δ – коэффициент передачи выпрямителя. Величина, обратная δ, называется скважностью.
Из формулы (12.1) видно, что среднее значение напряжения на нагрузке (U2ср) можно регулировать двумя способами:
1) путем изменения интервала проводимости (tи) ключа при постоянстве частоты коммутации (fк) прерывателя; такое регулирование называется широтно-импульсным (ШИМ) и изображено на рис. 12.2, а;
2) путем изменения частоты коммутации (fк) при постоянстве интервала проводимости (tu); такое регулирование называется частотно-импульсным (ЧИМ), изображено на рис. 12.2, б.
Преимущественное использование на практике ШИМ объясняется наличием следующих недостатков у ЧИМ:
· возможностью появления прерывистого тока при низких частотах;
· появлением радиопомех на высоких частотах.
Широтно-импульсное регулирование находит все более широкое применение для регулирования и стабилизации электрических параметров нагрузок различного рода (на электротранспорте, в приводе металлообрабатывающих станков, для питания бортовых систем и т.д.) Это объясняется рядом их преимуществ: высоким КПД; высоким быстродействием; точностью регулирования выходного напряжения в широком диапазоне; высокой точностью управления при сохранении устойчивости; слабой чувствительностью к изменениям температуры окружающей среды.
Однако им свойственны и некоторые недостатки: наличие пульсаций выходного напряжения создает необходимость устанавливать фильтры, что вызывает инерционность преобразователя и сложность управления для обеспечения устойчивости работы на импульсную нагрузку.
Схема импульсного коммутатора постоянного тока (рис. 12.3) содержит силовой тиристор VSc и узел принудительного выключения силового тиристора, содержащий коммутирующий тиристор VSк, коммутирующие индуктивность Lк и емкость Ск, коммутирующий ди
Подготовка схемы к работе начинается с заряда коммутирующей емкости Cк с полярностью, указанной на рис. 12.3. Заряд коммутирующей емкости Cк можно осуществить с помощью кнопки Кз через сопротивление Rз по цепи «+» — Cк — Кз — Rз — «-», или при помощи специальной системы управления коммутатором, которая первый импульс подает на коммутирующий тиристор VSк, и после его открытия происходит заряд Cк.
Работа схемы начинается после включения силового тиристора VSс. При этом образуется две цепи: одна для протекания тока нагрузки, другая – для перезаряда коммутирующей емкости Cк. Время перезаряда емкости Cк определяется параметрами колебательного контура, образованного коммутирующими элементами Lк и Ск.
После перезаряд Cк происходит вынужденное выключение силового тиристора VSc с помощью приложенного к нему обратного напряжения через коммутирующий тиристор VSк . В процессе выключения VSc емкость Cк разряжается. После запирания силового тиристора в работе остается коммутирующий тиристор VSк и, осуществляя заряд емкости Cк, подготавливает схему к дальнейшей работе.
Импульсный коммутатор переменного тока (рис. 12.4) обладает двухсторонней проводимостью тока. В одну из диагоналей диодного моста включается ТП с ШИМ, а через другую диагональ подключается нагрузка к сети переменного напряжения. Процессы, происходящие в данной схеме, поясняются диаграммой (рис. 12.5).
В положительную полуволну напряжения сети работают диоды VD1, VD4 импульсный коммутатор. Отрицательную полуволну выходного напряжения формируют совместно с диодами VD2, VD3 тот же импульсный коммутатор. Процесс регулирования первой гармонической составляющей выходного напряжения осуществляется изменением длтельности работы силового тиристора VSc.
На практике питание нагрузок постоянного тока чаще осуществляется выпрямленным напряжением, поэтому представляет интерес работа ТП с ШИМ в цепи нагрузки выпрямителя (рис. 12.7).
Особенностей в работе импульсного коммутатора в цепи выпрямленного тока и в цепи постоянного тока нет, отличие заключается лишь в форме выходного напряжения (рис. 12.7). Выходное напряжение состоит из регулируемых импульсов, полученных из двухполупериодного выпрямленного напряжения. Регулирование импульсов среднего выпрямленного напряжения осуществляется широтно-ипульсным способом.
Поскольку в обеих схемах (рис. 12.4 и 12.6) тиристорный коммутатор включен в диагональ выпрямленного тока, то процессы, происходящие собственно в ТП с ШИМ, аналогичны.
Источник
9. Принципы регулирования выходного напряжения полупроводниковых преобразователей частоты
При частотном управлении электрической машиной возникает необходимость регулирования напряжения, подводимого к машине. Существующие способы регулирования выходного напряжения полупроводниковых преобразователей разделяются на следующие основные типы (рис.9.1): амплитудный, фазовый на переменном токе, широтный и широтно-импульсный. Кроме того, способы регулирования напряжения можно классифицировать в зависимости от их пригодности только для преобразователей частоты с инверторами напряжения или тока и с инверторами напряжения и тока.
Преобразователи частоты с непосредственной связью и с промежуточным звеном переменного тока повышенной частоты (см. рис.1.1,б—г) построены на базе реверсивных управляемых выпрямителей, поэтому в них используется амплитудный способ регулирования напряжения, такой же, как в тиристорных выпрямителях, т. е. фазовое регулирование. Этот же способ применяется и в бесконтактных регулируемых преобразовательных устройствах (БРПУ), предназначенных для параметрического регулирования частоты вращения машины.
Амплитудное регулирование напряжения в ПЧ с автономными инверторами напряжения и тока осуществляется путем изменения постоянного напряжения на входе инвертора, которое может производиться двумя способами: а) посредством управляемого выпрямителя с фазовым регулированием; б) с помощью неуправляемого выпрямителя с широтно-импульсным преобразователем (ШИП).
Другие способы регулирования постоянного напряжения при наличии неуправляемого выпрямителя не нашли широкого применения в преобразователях частоты.
При использовании широтно-импульсного преобразователя его включают между неуправляемым выпрямителем и инвертором (рис.9.2). Регулирование напряжения на входе инвертора (рис.9.2,а) производится путем изменения скважности.
К достоинствам ШИП можно отнести высокое быстродействие при регулировании напряжения, более высокий, чем у управляемого выпрямителя, коэффициент мощности со стороны питающей сети, малые размеры сглаживающего фильтра на входе инвертора. ШИП может выполнять также функции быстродействующего выключателя в аварийных режимах. Недостатками ШИП являются большие потери в ключах коммутации из-за высокой частоты переключений, односторонняя проводимость энергии, что препятствует его применению в системах, где возможен рекуперативный режим работы машины. Поэтому ШИП используется в основном в системах управления машинами
малой и средней мощности и в тех случаях, когда источником энергии является нерегулируемая сеть постоянного тока (аккумуляторные батареи, бортовая сеть и т.д.).
Источник
Основные сведения о частотно-регулируемом электроприводе
Частотник в комплекте с асинхронным электродвигателем позволяет заменить электропривод постоянного тока. Системы регулирования скорости двигателя постоянного тока достаточно просты, но слабым местом такого электропривода является электродвигатель. Он дорог и ненадежен. При работе происходит искрение щеток, под воздействием электроэрозии изнашивается коллектор. Такой электродвигатель не может использоваться в запыленной и взрывоопасной среде.
Асинхронные электродвигатели превосходят двигатели постоянного тока по многим параметрам: они просты по устройству и надежны, так как не имеют подвижных контактов. Они имеют меньшие по сравнению с двигателями постоянного тока размеры, массу и стоимость при той же мощности. Асинхронные двигатели просты в изготовлении и эксплуатации.
Основной недостаток асинхронных электродвигателей – сложность регулирования их скорости традиционными методами (изменением питающего напряжения, введением дополнительных сопротивлений в цепь обмоток). Управление асинхронным электродвигателем в частотном режиме до недавнего времени было большой проблемой, хотя теория частотного регулирования была разработана еще в тридцатых годах. Развитие частотно-регулируемого электропривода сдерживалось высокой стоимостью преобразователей частоты. Появление силовых схем с IGBT-транзисторами, разработка высокопроизводительных микропроцессорных систем управления позволило различным фирмам Европы, США и Японии создать современные преобразователи частоты доступной стоимости.
Известно, что регулирование частоты вращения исполнительных механизмов можно осуществлять при помощи различных устройств: механических вариаторов, гидравлических муфт, дополнительно вводимыми в статор или ротор резисторами, электромеханическими преобразователями частоты, статическими преобразователями частоты.
Применение первых четырех устройств не обеспечивает высокого качества регулирования скорости, неэкономично, требует больших затрат при монтаже и эксплуатации. Статические преобразователи частоты являются наиболее совершенными устройствами управления асинхронным приводом в настоящее время.
Принцип частотного метода регулирования скорости асинхронного двигателя заключается в том, что, изменяя частоту f1 питающего напряжения, можно в соответствии с выражением
неизменном числе пар полюсов p изменять угловую скорость магнитного поля статора.
Этот способ обеспечивает плавное регулирование скорости в широком диапазоне, а механические характеристики обладают высокой жесткостью.
Регулирование скорости при этом не сопровождается увеличением скольжения асинхронного двигателя, поэтому потери мощности при регулировании невелики. Для получения высоких энергетических показателей асинхронного двигателя – коэффициентов мощности, полезного действия, перегрузочной способности – необходимо одновременно с частотой изменять и подводимое напряжение.
Закон изменения напряжения зависит от характера момента нагрузки Mс . При постоянном моменте нагрузки Mс=const напряжение на статоре должно регулироваться пропорционально частоте:
Для вентиляторного характера момента нагрузки это состояние имеет вид:
При моменте нагрузки, обратно пропорциональном скорости:
Таким образом, для плавного бесступенчатого регулирования частоты вращения вала асинхронного электродвигателя, преобразователь частоты должен обеспечивать одновременное регулирование частоты и напряжения на статоре асинхронного двигателя.
Преимущества использования регулируемого электропривода в технологических процессах
Применение регулируемого электропривода обеспечивает энергосбережение и позволяет получать новые качества систем и объектов. Значительная экономия электроэнергии обеспечивается за счет регулирования какого-либо технологического параметра. Если это транспортер или конвейер, то можно регулировать скорость его движения. Если это насос или вентилятор – можно поддерживать давление или регулировать производительность. Если это станок, то можно плавно регулировать скорость подачи или главного движения.
Особый экономический эффект от использования преобразователей частоты дает применение частотного регулирования на объектах, обеспечивающих транспортировку жидкостей. До сих пор самым распространённым способом регулирования производительности таких объектов является использование задвижек или регулирующих клапанов, но сегодня доступным становится частотное регулирование асинхронного двигателя, приводящего в движение, например, рабочее колесо насосного агрегата или вентилятора.
Перспективность частотного регулирования наглядно видна из рисунка 1
Таким образом, при дросселировании поток вещества, сдерживаемый задвижкой или клапаном, не совершает полезной работы. Применение регулируемого электропривода насоса или вентилятора позволяет задать необходимое давление или расход, что обеспечит не только экономию электроэнергии, но и снизит потери транспортируемого вещества.
Структура частотного преобразователя
Большинство современных преобразователей частоты построено по схеме двойного преобразования. Они состоят из следующих основных частей: звена постоянного тока (неуправляемого выпрямителя), силового импульсного инвертора и системы управления.
Звено постоянного тока состоит из неуправляемого выпрямителя и фильтра. Переменное напряжение питающей сети преобразуется в нем в напряжение постоянного тока. Силовой трехфазный импульсный инвертор состоит из шести транзисторных ключей. Каждая обмотка электродвигателя подключается через соответствующий ключ к положительному и отрицательному выводам выпрямителя. Инвертор осуществляет преобразование выпрямленного напряжения в трехфазное переменное напряжение нужной частоты и амплитуды, которое прикладывается к обмоткам статора электродвигателя.
В выходных каскадах инвертора в качестве ключей используются силовые IGBT-транзисторы. По сравнению с тиристорами они имеют более высокую частоту переключения, что позволяет вырабатывать выходной сигнал синусоидальной формы с минимальными искажениями.
Принцип работы преобразователя частоты
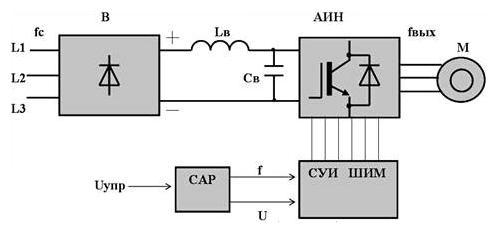
Преобразователь частоты состоит из неуправляемого диодного силового выпрямителя В, автономного инвертора , системы управления ШИМ, системы автоматического регулирования, дросселя Lв и конденсатора фильтра Cв (рис.2). Регулирование выходной частоты fвых. и напряжения Uвых осуществляется в инверторе за счет высокочастотного широтно-импульсного управления.
Широтно-импульсное управление характеризуется периодом модуляции, внутри которого обмотка статора электродвигателя подключается поочередно к положительному и отрицательному полюсам выпрямителя.
Длительность этих состояний внутри периода ШИМ модулируется по синусоидальному закону. При высоких (обычно 2…15 кГц) тактовых частотах ШИМ, в обмотках электродвигателя, вследствие их фильтрующих свойств, текут синусоидальные токи.
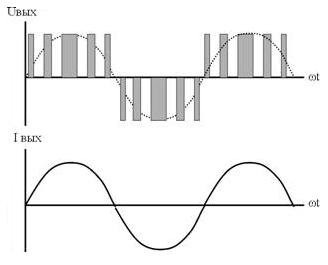
Таким образом, форма кривой выходного напряжения представляет собой высокочастотную двухполярную последовательность прямоугольных импульсов (рис. 3). Частота импульсов определяется частотой ШИМ, длительность (ширина) импульсов в течение периода выходной частоты АИН промодули-рована по синусоидальному закону. Форма кривой выходного тока (тока в обмотках асинхронного электродвигателя) практически синусоидальна.
Регулирование выходного напряжения инвертора можно осуществить двумя способами: амплитудным (АР) за счет изменения входного напряжения Uв и широтно-импульсным (ШИМ) за счет изменения программы переключения вентилей V1-V6 при Uв = const.
Второй способ получил распространение в современных преобразователях частоты благодаря развитию современной элементной базы (микропроцессоры, IBGT-транзисторы). При широтно-импульсной модуляции форма токов в обмотках статора асинхронного двигателя получается близкой к синусоидальной благодаря фильтрующим свойствам самих обмоток.
Такое управление позволяет получить высокий КПД преобразователя и эквивалентно аналоговому управлению с помощью частоты и амплитуды напряжения. Современные инверторы выполняются на основе полностью управляемых силовых полупроводниковых приборов – запираемых GTO – тиристоров, либо биполярных IGBT-транзисторов с изолированным затвором. На рис. 2.45 представлена 3-х фазная мостовая схема автономного инвертора на IGBT-транзисторах.
Она состоит из входного емкостного фильтра Cф и шести IGBT-транзисторов V1-V6 включенными встречно-параллельно диодами обратного тока D1-D6.
За счет поочередного переключения вентилей V1-V6 по алгоритму, заданному системой управления, постоянное входной напряжение Uв преобразуется в переменное прямоугольно-импульсное выходное напряжение. Через управляемые ключи V1-V6 протекает активная составляющая тока асинхронного электродвигателя, через диоды D1-D6 – реактивная составляющая тока.
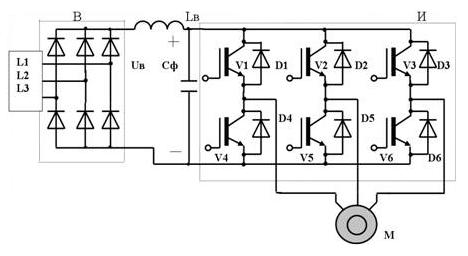
И – трехфазный мостовой инвертор;
В – трехфазный мостовой выпрямитель;
Сф – конденсатор фильтра;
Источник



