
Способы передачи вращательного движения.
Передача – устройство, главная функция которого передача энергии на расстояние, в зависимости от способа передачи энергии, они могут быть: механические, электрические, пневматические, гидравлические. Механической передачей называется механизм, который преобразует параметры движения источника энергии (двигателя) при передаче исполнительным органам, в этом случае передача осуществляет согласование параметров движения двигателя и исполнительного рабочего органа.
Передачи вращательного движения по способу соединения тел вращения бывают: 1) передачи с контактом тел вращения – зубчатые, червячные, фрикционные, винтовые, 2) передачи гибкой связью – ремённые и цепные; по способу передачи движения – передачи с зацеплением (зубчатые, червячные, цепные), трением – ременные и фрикционные. Электри́ческая переда́ча — обеспечивает передачу тягового усилия от первичного двигателя к движителю или исполнительному органу, используя электрически соединённые электрогенератор и электродвигатель.
Сложное движение. Плоскопараллельное движение тела.
Плоскопаралле́льное движе́ние — вид движения абсолютно твёрдого тела, при котором траектории всех точек тела располагаются в плоскостях, параллельных заданной плоскости.
Примером плоскопараллельного движения по отношению к вертикальной плоскости, относительно которой тело движется в параллельном направлении, является качение колеса по горизонтальной дороге.
Пример плоскопараллельного движения относительно плоскости чертежа — качение колеса по горизонтальной дороге. Все точки колеса движутся параллельно плоскости рисунка.
Здесь плоскопараллельное движение в каждый момент времени может быть представлено в виде суммы двух движений — полюса C, являющегося не чем иным, как центром вращения колеса в связанной с ним системе координат (в общем случае по любой траектории на плоскости с точки зрения неподвижного наблюдателя) и вращательного движения остальных точек тела вокруг этого центра.
 Вращение тела в случае его плоско-параллельного движения не является необходимым признаком последнего. В таком случае вектор абсолютной скорости движения любой точки будет определяться векторной суммой переносной скорости движения центра вращения С, (одинаковой для расчёта скорости любой точки колеса). И вектора относительной скорости выбранной точки, зависящей от её положения, угловой скорости вращения и расстояния от центра.
Вращение тела в случае его плоско-параллельного движения не является необходимым признаком последнего. В таком случае вектор абсолютной скорости движения любой точки будет определяться векторной суммой переносной скорости движения центра вращения С, (одинаковой для расчёта скорости любой точки колеса). И вектора относительной скорости выбранной точки, зависящей от её положения, угловой скорости вращения и расстояния от центра.
Если в данный момент для точки контакта колеса с поверхностью (точки А) эти скорости равны по модулю и противоположны по направлению, имеет место случай чистого (без проскальзывания) качения, что показано на рисунке. Только в этом случае скорость точки М будет в 2 раза больше скорости точки С и направлена в ту же сторону. В общем случае их соотношение может быть любым не только по величине, но и по направлению.
Сложное движения. Определение скорости любой точки тела.
Теорема 1. Абсолютная скорость  любой точки плоской фигуры в каждый данный момент равна геометрической сумме двух скоростей: скорости
любой точки плоской фигуры в каждый данный момент равна геометрической сумме двух скоростей: скорости  произвольно выбранного полюса в поступательном движении плоской фигуры и вращательной скорости
произвольно выбранного полюса в поступательном движении плоской фигуры и вращательной скорости  во вращательном движении фигуры относительно полюса.
во вращательном движении фигуры относительно полюса.
Положение любой точки В тела можно определить равенством:

 Взяв производную от обеих частей уравнения по времени получим,
Взяв производную от обеих частей уравнения по времени получим,
где  — искомая скорость;
— искомая скорость;  — скорость полюса;
— скорость полюса;  — скорость точки В при вращательном движении тела вокруг полюса А при
— скорость точки В при вращательном движении тела вокруг полюса А при  Таким образом
Таким образом
 ,
, 
 Теорема 2. Проекции скоростей двух точек плоской фигуры на ось, проходящую через эти точки, равны и имеют одинаковый знак. Зная, что
Теорема 2. Проекции скоростей двух точек плоской фигуры на ось, проходящую через эти точки, равны и имеют одинаковый знак. Зная, что  , спроецируем данное выражение на прямую АВ, тогда
, спроецируем данное выражение на прямую АВ, тогда
Теорема 3. Плоская фигура в каждый момент времени имеет одну точку, абсолютная скорость которой равна нулю. Эта точка называется мгновенным центром скоростей (МЦС), обозначим ее буквой Р. Докажем существование МЦС  тогда точка Р и будет искомой.
тогда точка Р и будет искомой.
 ,
,
Источник
Передачи вращательного движения
Механическая энергия, используемая для приведения в движение машины-орудия, представляет собой энергию вращательного движения вала двигателя. Вращательное движение получило наибольшее распространение в механизмах и машинах, так как обладает следующими достоинствами : обеспечивает непрерывное и равномерное движение при небольших потерях на трение; позволяет иметь простую и компактную конструкцию передаточного механизма.
Все современные двигатели для уменьшения габаритов и стоимости выполняют быстроходными с весьма узким диапазоном изменения угловых скоростей. Непосредственно быстроходный вал двигателя соединяют с валом машины редко (вентиляторы и т. п.). В абсолютном большинстве случаев режим работы машины-орудия не совпадает с режимом работы двигателя, поэтому передача механической энергии от двигателя к рабочему органу машины осуществляется с помощью различных передач.
Передачей будем называть устройство, предназначенное для передачи энергии из одной точки пространства в другую, расположенную на некотором расстоянии от первой.
В современном машиностроении в зависимости от вида передаваемой энергии применяют механические, пневматические, гидравлические и электрические передачи. В курсе «Детали машин» рассматривают только наиболее распространенные механические передачи.
Механическими передачами, или просто передачами, называют механизмы для передачи энергии от машины-двигателя к машине-орудию, как правило, с преобразованием скоростей, моментов, а иногда — с преобразованием видов (например, вращательное в поступательное) и законов движения.
Передача (в механике) соединяет вал источника энергии — двигателя и валы потребителей энергии — рабочих органов машины, таких, например, как ведущие колёса гусеничного движителя или автомобиля.
Механические передачи известны со времен зарождения техники, прошли вместе с ней длительный путь развития и совершенствования и имеют сейчас очень широкое распространение. Грамотная эксплуатация механических передач требует знания основ и особенностей их проектирования и методов расчетов.
При проектировании к механическим передачам предъявляются следующие требования:
— высокие нагрузочные способности при ограниченных габаритных размерах, весе, стоимости;
— постоянство передаточного отношения или закона его изменения;
— обеспечение определенного взаимного расположения осей ведущего и ведомого валов, в частности, межосевого расстояния a w ;
— малые потери при передаче мощности (высокий кпд) и, как следствие, ограниченный нагрев и износ;
— плавная и бесшумная работа;
— прочность, долговечность, надёжность.
Передачи имеют широкое распространение в машиностроении по следующим причинам:
1) энергию целесообразно передавать при больших частотах вращения;
2) требуемые скорости движения рабочих органов машин, как правило, не совпадают с оптимальными скоростями двигателя; обычно ниже, а создание тихоходных двигателей вызывает увеличение габаритов и стоимости;
3) скорость исполнительного органа в процессе работы машины-орудия необходимо изменять (например, у автомобиля, грузоподъемного крана, токарного станка), а скорость машины-двигателя чаще постоянна (например, у электродвигателей);
4) нередко от одного двигателя необходимо приводить в движение несколько механизмов с различными скоростями;
5) в отдельные периоды работы исполнительному органу машины требуется передать вращающие моменты, превышающие моменты на валу машины-двигателя, а это возможно выполнить за счет уменьшения угловой скорости вала машины-орудия;
6) двигатели обычно выполняют для равномерного вращательного движения, а в машинах часто оказывается необходимым поступательное движение с определенным законом;
7) двигатели не всегда могут быть непосредственно соединены с исполнительными механизмами из-за габаритов машины, условий техники безопасности и удобства обслуживания;
8) распределять работу двигателя между несколькими исполнительными органами машины.
Как правило, угловые скорости валов большинства используемых в настоящее время в технике двигателей (поршневых двигателей внутреннего сгорания, газотурбинных, электрических, гидравлических и пневматических двигателей) значительно превышают угловые скорости валов исполнительных или рабочих органов машин, порой на 2-3 порядка. Поэтому доставка (передача) энергии двигателя с помощью передачи любого типа, в том числе и механической, происходит, как правило, совместно с одновременным преобразованием моментов и угловых скоростей (в сторону повышения первых и понижения последних).
При этом необходимо отметить, что конструктивное обеспечение функции транспортного характера – чисто передачи энергии иной раз вступает в логическое противоречие с направлением задачи конечного преобразования силовых и скоростных параметров этой энергии. Например, в трансмиссиях многих транспортных машин (особенно высокой проходимости) входной редуктор сначала повышает частоту вращения, понижение ее до требуемых пределов производят бортовые или колесные редукторы.
Этот прием позволяет снизить габаритно-весовые показатели промежуточных элементов трансмиссии (коробок перемены передач, карданных валов) – размеры валов и шестерен пропорциональны величине передаваемого крутящего момента в степени 1/3.
Аналогичный принцип используется при передаче электроэнергии – повышение напряжения перед ЛЭП позволяет значительно снизить тепловые потери, определяемые в основном силой тока в проводах, а заодно уменьшить сечение этих проводов.
Иногда передача механической энергии двигателя сопровождается также преобразованием вида движения (например, поступательного движения во вращательное или наоборот) или законов движения (например, равномерного движения в неравномерное).
Широко известными образцами таких передач являются кривошипно-шатунный механизм и кулачковый привод механизма газораспределения.
Классификация механических передач
Механические передачи, применяемые в машиностроении, классифицируют (рис.1 и 2):
по энергетической характеристике механические передачи делятся на:
— кинематические (передаваемая мощность Р
— силовые (передаваемая мощность Р ≥0,1 кВт).
по принципу передачи движения:
— передачи трением (примеры: фрикционная — рис.1, а и ременная — рис.2, а) — действующие за счет сил трения, создаваемых между элементами передач;
Фрикционные передачи подразделяют на:
— фрикционные передачи с жесткими звеньями (с различного рода катками, дисками);
— фрикционные передачи с гибким звеном (ременные, канатные).
— зацеплением (примеры: зубчатые — рис.1, б, червячные — рис.1, в; цепные — рис.2, б; передачи винт-гайка — рис.1, г, д) — работающие в результате возникновения давления между зубьями, кулачками или другими специальными выступами на деталях.
Передачи зацеплением делятся на:
— передачи зацеплением с непосредственным контактом жестких звеньев (цилиндрические, конические, червячные);
— волновые передачи зацеплением;
— передачи зацеплением с гибким звеном (зубчато-ременные, цепные).
Как фрикционные, так и зубчатые передачи могут быть выполнены с непосредственным контактом ведущего и ведомого звеньев или посредством гибкой связи – ремня, цепи.
Источник
Передачи вращательного движения
Передача – устройство, главная функция которого передача энергии на расстояние, в зависимости от способа передачи энергии, они могут быть: механические, электрические, пневматические, гидравлические. В курсе деталей машин мы будем изучать только механические передачи вращательного движения.
Механической передачей называется механизм, который преобразует параметры движения источника энергии (двигателя) при передаче исполнительным органам, в этом случае передача осуществляет согласование параметров движения двигателя и исполнительного рабочего органа.
Передачи вращательного движения по способу соединения тел вращения бывают: 1) передачи с контактом тел вращения – зубчатые, червячные, фрикционные, винтовые, 2) передачи гибкой связью – ремённые и цепные; по способу передачи движения – передачи с зацеплением (зубчатые, червячные, цепные), трением – ременные и фрикционные.
3.10.1. Кинематические и силовые параметры передач
Это параметры, характеризующие вращательное движение элементов передач:
1) Частота вращения, n (об/мин), выражается через угловую скорость (рад/с):
 , (3.14)
, (3.14)
2) Крутящий момент на валу T, Нм
3) Окружная скорость (Н) – сила вызывающая вращение тел или сопротивление вращению и направленная по касательной к траектории точки ее приложения.
 , (3.15)
, (3.15)
4) Мощность на валу, Р, Вт:
 ; (3.16)
; (3.16)
 . (3.17)
. (3.17)
3.10.2. Передаточное отношение и КПД механизма
Отношение угловых скоростей ведущих и ведомых тел называется передаточным отношением.
 . (3.18)
. (3.18)
Для одноступенчатого редуктора:
 , (3.19)
, (3.19)
Передаточное отношение привода состоящего из нескольких передач, расположенных последовательно, равно произведению передаточных чисел всех его передач.
 , (3.20)
, (3.20)
где n – число передач, входящих в привод.
КПД привода равен отношению мощности на ведомом и ведущем валах:
 , (3.21)
, (3.21)
В общем случае КПД привода состоящего из нескольких передач равен произведению КПД передач входящих в привод:
 . (3.22)
. (3.22)
3.10.3. Ременные и цепные передачи
Передача вращения посредством ремня, надетого на шкивы, называется ременной передачей (Рис. 3.18).
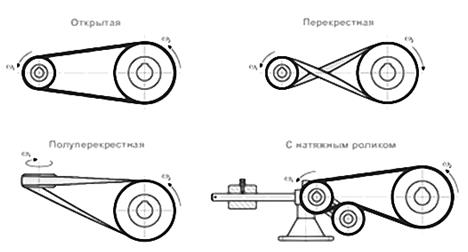
Рис. 3.18. Ременные передачи
Ременные передачи применяют преимущественно в тех случаях, когда по условиям конструкции валы расположены на значительных расстояниях или высокие скорости не позволяют применять другие виды передач.
Ременные передачи бывают: По форме поперечного сечения ремня: плоскоременные (а), клиноременные (б), круглоременные (г) а также передачи с зубчатыми ремнями (в, д, е) (Рис. 3.19).



Рис. 3.19. Формы поперечного сечения ремней
Плоскоременные передачи более простые по конструкции, однако, клиноременные обладают большей нагрузочной способностью.
Ременные передачи по расположению осей валов подразделяются:
1) Открытыми с параллельно расположенными осями валов и вращением шкивов в одном направлении, 2) перекрестные, с параллельными осями валов и вращением шкивов в противоположных направлениях, 3) полуперекрестные со скрещивающими осями валов, 4) угловые со скрещивающимися или пересекающимися осями валов.
По способу натяжения ремня: с периодическим натяжением (перемещением опоры шкива); с автоматическим натяжением (натяжным роликам).
Преимущества ременных передач: 1) возможность больших межосевых расстояний, 2) плавность работы, гашение ударов за счет эластичности ремня и возможности проскальзывания, 3) простота конструкции и эксплуатации, 4) возможность передачи большого диапазона мощностей и скоростей, 5) относительно высокий КПД.
Недостатки: 1) относительно большие размеры передачи, 2) непостоянство передаточного отношения вследствие проскальзывания, 3) повышенная нагрузка на валы от натяжения ремня, 5) не долговечность ремней в среднем 2-3 тысячи часов работы.
Материал ремней: материал ремня должен обеспечивать надежность сцепления со шкивами и достаточную долговечность. Самые распространенные – резинотканевые ремни, кожаные, хлопчатобумажные цельнотканые, полимерные.
Клиновые ремни наиболее распространены и имеют трапециидальное сечение и выпускается 2-х типов: корд-шнуровые (а) и корд-тканевые (б) (Рис. 3.20). Корд шнуровые ремни более гибкие и долговечные поэтому применяются для более сложных условий работы.
Рис. 3.20. Типы клиновых ремней
3.10.4. Расчет и проектирование ременных передач
Основными критериями работоспособности ременных передач являются: тяговая способность, определяемая силой трения между ремнем и шкивом; долговечность ремня, которая в условиях нормальной эксплуатации ограничивается разрушением от усталости (Рис. 3.21).
Геометрические параметры ременных передач: аw – межосевое расстояние передачи, d 1 и d2 – диаметры ведущего и ведомого шкивов, α1, α2 – угол обхвата ведущего и ведомого шкивов.
1) Передаточное отношение передачи:
 . (3.23)
. (3.23)
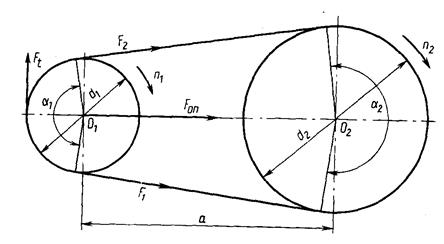
Рис. 2.21. Схема ременной передачи
С учетом скольжения ремня:
 . (3.24)
. (3.24)
где ξ(дзетта) – коэффициент скольжения ремня ξ = 0,01…0,02.
Передаточное отношение ременной передачи обычно не превышает шести;
2) Скорость ремня
 . (3.25)
. (3.25)
3) Угол обхвата меньшего шкива
 . (3.26)
. (3.26)
 . (3.27)
. (3.27)
3.10.5. Силовые взаимодействия в ременной передаче
Окружная сила ременной передачи:
 , (3.28)
, (3.28)
где F1 – натяжение ведущей ветви,
F2 – натяжение ведомой ветви.
Р1 – мощность на ведомом шкиву,
V – скорость ремня,
кg – коэффициент динамической нагрузки.
Окружная скорость равна:
 , (3.29)
, (3.29)
Сила начального натяжения:
 , (3.30)
, (3.30)
где А – площадь поперечного сечения ремня,
σ0 — начальное напряжение в ремне.
 , (3.31)
, (3.31)
Решая совместно выражения (3.30) и (3.31) получим:
 ; (3.32)
; (3.32)
 . (3.33)
. (3.33)
Уравнения (3.32, 3.33) представляют систему 2-х уравнений с тремя неизвестными, для его решения Эйлером было получено уравнение, представляющее собой зависимость между силой трения ремня о шкив и тяговой способностью передачи:
 , (3.34)
, (3.34)
где е = 2,71, f – коэффициент трения ремня о шкив, α  — угол обхвата шкива ремнем.
— угол обхвата шкива ремнем.
Решая совместно уравнения (3.30) и (3.34) получим выражения:
 , (3.35)
, (3.35)
 , (3.36)
, (3.36)
 . (3.37)
. (3.37)
Формулы (3.36 и 3.37) устанавливают связь сил натяжения ветвей работающей передачи с величиной нагрузки Ft и факторами трения (f и α). Они позволяют также определить минимально необходимую величину предварительного натяжения ремня F0 , при которой еще возможна передача заданной нагрузки Ft:
Если:  , (3.38)
, (3.38)
то в передаче начнется буксование ремня.
Тяговая способность передачи характеризуется величиной максимально допустимой окружной силы Ft или полезного напряжения σF,учитывая формулы (3.34-3.36), можно сделать вывод, что допустимое по условию отсутствия буксования напряжение возрастает с увеличением напряжения от предварительного натяжения σ0:
 . (3.39)
. (3.39)
Практика показывает, что происходит значительное снижение долговечности ремня с увеличением σ0.
Силы натяжения ветвей ремня передаются на валы и опоры. Равнодействующая нагрузку можно определить по формуле:
 . (3.40)
. (3.40)
Обычно R в два, три раза больше окружной силы Ft.
Источник



