
Регулирование скорости двигателей постоянного тока
 Из уравнения электромеханической характеристики двигателя постоянного тока независимого возбуждения следует, что возможны три способа регулирования его угловой скорости:
Из уравнения электромеханической характеристики двигателя постоянного тока независимого возбуждения следует, что возможны три способа регулирования его угловой скорости:
1) регулирование за счет изменения величины сопротивления реостата в цепи якоря,
2) регулирование за счет изменения потока возбуждения двигателя Ф,
3) регулирование за счет изменения подводимого к обмотке якоря двигателя напряжения U . Ток в цепи якоря I я и момент М, развиваемый двигателем, зависят только от величины нагрузки на его валу.
Рассмотрим первый способ регулирования скорости двигателя постоянного тока изменением сопротивления в цепи якоря . Схема включения двигателя для этого случая представлена на рис. 1 , а электромеханические и механические характеристики — на рис. 2 , а.
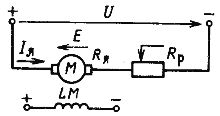
Рис. 1. Схема включения двигателя постоянного тока независимого возбуждения
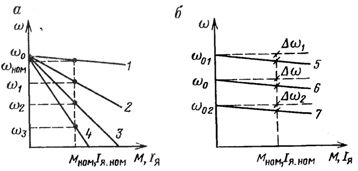
Рис. 2. Механические характеристики двигателя постоянного тока при различных сопротивлениях цепи якоря (а) и напряжениях (б)
Изменяя сопротивление реостата в цепи якоря можно получить при номинальной нагрузке различные угловые скорости электродвигателя на искусственных характеристиках — ω1, ω2, ω3.
Проведем анализ данного способа регулирования угловой скорости двигателей постоянного тока с помощью основных технико-экономических показателей. Так как при данном способе регулирования изменяется жесткость характеристик в широких пределах, то при скоростях менее половины номинальной стабильность работы двигателя резко ухудшается. По этой причине диапазон регулирования скорости ограничен ( D = 2 — З).
Скорость при данном способе можно регулировать в сторону уменьшения от основной, о чем свидетельствуют электромеханические и механические характеристики. Высокую плавность регулирования трудно обеспечить, так как потребовалось бы значительное количество ступеней регулирования и соответственно большое число контакторов. Полное использование двигателя по току (нагреву) в этом случае достигается при регулировании с постоянным моментом нагрузки.
Недостатком рассматриваемого способа является наличие значительных потерь мощности при регулировании, которые пропорциональны относительному изменению угловой скорости. Достоинством рассмотренного способа регулирования угловой скорости являются простота и надежность схемы управления.
Учитывая большие потери в реостате при малых скоростях, данный способ регулирования скорости применяется для приводов с кратковременным и повторно-кратковременным режимами работы.
 При втором способе регулирование угловой скорости двигателей постоянного тока независимого возбуждения осуществляется изменением величины магнитного потока за счет введения в цепь обмотки возбуждения дополнительного реостата. При ослаблении потока угловая скорость двигателя как при нагрузке, так и при холостом ходе возрастает, а при усилении потока — уменьшается. Практически возможно изменение скорости только в сторону увеличения ввиду насыщения двигателя.
При втором способе регулирование угловой скорости двигателей постоянного тока независимого возбуждения осуществляется изменением величины магнитного потока за счет введения в цепь обмотки возбуждения дополнительного реостата. При ослаблении потока угловая скорость двигателя как при нагрузке, так и при холостом ходе возрастает, а при усилении потока — уменьшается. Практически возможно изменение скорости только в сторону увеличения ввиду насыщения двигателя.
При увеличении скорости ослаблением потока допустимый момент двигателя постоянного тока изменяется по закону гиперболы, а мощность остается постоянной. Диапазон регулирования скорости для данного способа D = 2 — 4 .
Механические характеристики для различных значений потока двигателя приведены на рис. 2 , а и 2 , б, из которых видно, что характеристики в пределах номинального тока имеют высокую степень жесткости.
Обмотки возбуждения двигателей постоянного тока независимого возбуждения обладают значительной индуктивностью. Поэтому при ступенчатом изменении сопротивления реостата в цепи обмотки возбуждения ток, а следовательно, и поток будут изменяться по экспоненциальному закону. В связи с этим регулирование угловой скорости будет осуществляться плавно.
Существенными преимуществами данного способа регулирования скорости являются его простота и высокая экономичность.
Данный способ регулирования используют в приводах в качестве вспомогательного, обеспечивающего повышение скорости при холостом ходе механизма.
Третий способ регулирования скорости заключается в изменении напряжения, подводимого к обмотке якоря двигателя. Угловая скорость двигателя постоянного тока независимо от нагрузки изменяется прямо пропорционально напряжению, подводимому к якорю. Поскольку все регулировочные характеристики являются жесткими, а степень их жесткости остается для всех характеристик неизменной, работа двигателя является стабильной на всех угловых скоростях и, следовательно, обеспечивается широкий диапазон регулирования скорости независимо от нагрузки. Этот диапазон равен 10 и может быть расширен за счет специальных схем управления.
При данном способе угловую скорость можно уменьшать и увеличивать относительно основной. Повышение скорости ограничено возможностями источника энергии с регулируемым напряжением и U ном двигателя.
Если источник энергии обеспечивает возможность непрерывного изменения подводимого к двигателю напряжения, то регулирование скорости двигателя будет плавным.
Данный способ регулирования является экономичным, так-так регулирование угловой скорости двигателя постоянного тока независимого возбуждения осуществляется без дополнительных потерь мощности в силовой цепи якоря. По всем перечисленным выше показателям данный способ регулирования по сравнению с первым и вторым наилучший.
Если Вам понравилась эта статья, поделитесь ссылкой на неё в социальных сетях. Это сильно поможет развитию нашего сайта!
Подписывайтесь на наш канал в Telegram!
Просто пройдите по ссылке и подключитесь к каналу.
Не пропустите обновления, подпишитесь на наши соцсети:
Источник
Способы регулирования частоты вращения двигателя постоянного тока.
Частоту вращения двигателей постоянного тока можно изменять тремя способами: изменением сопротивления rя цепи якоря, изменением магнитного потока Ф, изменением подводимого к двигателю напряжения U.
Первый способ применяют редко, так как он неэкономичен, дает возможность вести регулирование частоты вращения только под нагрузкой и вынуждает использовать механические характеристики, имеющие различный наклон. При регулировании по этому способу вращающий предельно допустимый момент остается постоянным. Магнитный поток не меняется, и если приближенно считать, что сила тока, определяемая длительно допустимым нагревом двигателя, одинакова на всех частотах вращения, то предельно допустимый момент также должен быть одинаков на всех скоростях.
Регулирование скорости двигателей постоянного тока с параллельным возбуждением изменением магнитного потока получило значительное распространение. Величину потока можно изменять реостатом. При увеличении сопротивления этого реостата уменьшается сила тока возбуждения и магнитный поток и увеличивается частота вращения. Каждому уменьшенному значению магнитного потока Ф соответствуют увеличенные значения n0 и b.
Таким образом, при ослаблении магнитного потока механические характеристики представляют собой прямые линии, расположенные выше естественной характеристики, непараллельные ей и имеющие тем больший наклон, чем меньшим потокам они соответствуют. Число их зависит от числа контактов на реостате и может быть достаточно большим. Таким образом, регулирование частоты вращения ослаблением потока может быть сделано практически бесступенчатым.

Если по-прежнему приближенно считать предельно допустимую силу тока на всех скоростях одинаковой, то P = const
Таким образом, при регулировании частоты вращения изменением магнитного потока предельно допустимая мощность двигателя остается постоянной при всех скоростях.Предельно допустимый момент изменяется обратно пропорционально частоте вращения. При повышении частоты вращения двигателя ослаблением поля увеличивается искрение под щетками вследствие роста реактивной э. д. с, наводимой в коммутируемых секциях двигателя.
При работе двигателя с ослабленным потоком уменьшается устойчивость работы, особенно когда нагрузка на валу двигателя является переменной. При малом значении потока заметно размагничивающее действие реакции якоря. Так как размагничивающее действие определяется величиной силы тока якоря электродвигателя, то при изменениях нагрузки частота вращения двигателя резко меняется. Для повышения устойчивости работы регулируемые двигатели с параллельным возбуждением обычно снабжают слабой последовательной обмоткой возбуждения, поток которой частично компенсирует размагничивающее действие реакции якоря.
Двигатели, предназначенные для работы с повышенными частотами вращения, должны обладать повышенной механической прочностью. При высоких скоростях усиливаются вибрации двигателя и шум при работе. Эти причины ограничивают наибольшую частоту вращения электродвигателя. Низшая частота вращения также имеет определенный практический предел.
Номинальный момент определяет размеры и стоимость двигателей постоянного тока (так же как и асинхронных двигателей). При понижении наименьшей, в данном случае номинальной, частоты вращения двигателя определенной мощности номинальный момент его возрастет. Размеры двигателя при этом увеличатся.
На промышленных предприятиях наиболее часто применяют двигатели с диапазонами регулирования

Для расширения диапазона регулирования частоты вращения изменением магнитного потока иногда употребляют особую схему возбуждения двигателя, позволяющую улучшить коммутацию и снизить влияние реакции якоря на высоких частотах вращения двигателя. Питание катушек двух пар полюсов разделяют, образуя две независимые цепи: цепь катушек одной пары полюсов и цепь другой пары.
Одну из цепей включают на постоянное напряжение, в другой изменяют величину и направление тока. При таком включении общий магнитный поток, взаимодействующий с якорем, можно изменять от суммы наибольших значений потоков катушек двух цепей до их разности.
Катушки включены так, что через одну пару полюсов всегда проходит полный магнитный поток. Поэтому реакция якоря сказывается в меньшей степени, чем при ослаблении магнитного потока всех полюсов. Так можно регулировать все многополюсные двигатели постоянного тока с волновой обмоткой якоря. При этом достигается устойчивая работа двигателя в значительном диапазоне скоростей.
Регулирование частоты вращения двигателей постоянного тока посредством изменения подводимого напряжения требует применения специальных схем.
Двигатели постоянного тока по сравнению с асинхронными значительно тяжелее и в несколько раз дороже. К. п. д. этих двигателей ниже, а эксплуатация их более сложна.
Промышленные предприятия получают энергию трехфазного тока, и для получения постоянного тока требуются специальные преобразователи. Это связано с добавочными потерями энергии. Основной причиной применения для привода металлорежущих станков двигателей постоянного тока с параллельным возбуждением является возможность практически бесступенчатого и экономичного регулирования их частоты вращения.
В станкостроении применяют комплектные приводы с выпрямителями и двигателем постоянного тока с параллельным возбуждением (рис. 1). Посредством реостата PC изменяют силу тока возбуждения электродвигателя, обеспечивая практически бесступенчатое регулирование его частоты вращения в диапазоне 2:1. В комплект привода входит пусковой реостат РП, а также аппаратура защиты, на рис. 1 не показанная.

Рис. 1. Схема электропривода постоянного тока с выпрямителем
Выпрямители (B1 — В6), погруженные в трансформаторное масло, и всю аппаратуру помещают в шкафу управления, а реостат PC устанавливают в месте, удобном для обслуживания.
Дата добавления: 2018-05-12 ; просмотров: 1246 ; Мы поможем в написании вашей работы!
Источник
Способы регулирования частоты вращения двигателя постоянного тока
Принципы регулирования частоты вращения в двигательном режиме реализуются в четырех основных способах регулирования:
1) реостатно-контакторное регулирование;
2) регулирование по системе «генератор — двигатель»;
3) регулирование по системе «управляемый выпрямитель — двигатель»;
4) тиристорно-импульсное регулирование.
Реостатно-контакторное регулирование.В настоящее время это управление широко применяется для регулирования частоты вращения двигателей малой и средней мощности, а иногда (на железнодорожном транспорте) и для мощных двигателей. Обычно при реостатно-контакторном управлении используются два метода регулирования: 1) при частотах вращения, меньших номинальной, в цепь якоря включают дополнительные сопротивления (Рис. 7 28). 2) при повышенных торного регулирования частоты вращения регулируют с последовательным. Машины малой мощности при отсутствии автоматизированного управления имеют два ползунковых регулировочных реостата, один из которых включен в цепь якоря, а другой — в цепь возбуждения. При больших мощностях, а также при необходимости автоматизации процесса сопротивления изменяют ступенчато (рис. 7.28) с помощью контакторов. Если требуется точное регулирование, то контакторов должно быть очень много, вся установка становится громоздкой, дорогой и сравнительно малонадежной. Реостатно-контакторная система при двигателях с параллельным возбуждением позволяет в зоне высоких частот вращения осуществлять рекуперативное торможение путем увеличения тока возбуждения. В зоне низких частот вращения применяют реостатное торможение, причем регулирование тормозного усилия осуществляют с помощью той же реостатно-контакторной установки, которая регулирует двигательный режим, после соответствующего переключения схемы. В связи со сложностью автоматизации и большими расходами на ремонт и эксплуатацию реостатно-контакторное управление в настоящее время постепенно заменяют более совершенными системами управления.
Регулирование по системе «генератор — двигатель.В этой установке (рис. 7.29) двигатель Д получает питание от автономного генератора Г с независимым возбуждением, который приводится во вращение каким-либо первичным двигателем ПД (например, электродвигателем, дизелем) Регулирование частоты вращения осуществляют изменением:
1) напряжения на якоре двигателя путем изменения тока возбуждения генератора /вГ;

Рис. 7 28. Схема реостатно-контак-торного регулирования частоты вращения двигателя с последовательным возбуждением.
2) магнитного потока двигателя путем регулирования тока возбуждения двигателя /в.д.
Пуск в ход и получение низких частот вращения производят при максимальном токе возбуждения двигателя, но при уменьшенном токе возбуждения генератора, т. е. при пониженном напряжении. Ослабление магнитного потока двигателя (уменьшение его тока возбуждения) производят только после того, как исчерпана возможность повышения напряжения, т. е. когда установлен максимальный ток возбуждения генератора. Изменение направления вращения двигателя производят переменой полярности подводимого к якорю напряжения, для чего меняют направление тока в обмотке возбуждения генератора. Система «генератор — двигатель» выгодно отличается тем, что в ней отсутствуют силовые контакторы, реостаты и т. п. Управление легко поддается автоматизации, так как осуществляется путем регулирования сравнительно небольших токов возбуждения. Установки типа «генератор — двигатель» широко распространены в промышленности и на транспорте, в тех устройствах, где требуется регулирование частоты вращения в широких пределах. В транспортных установках генератор приводится во вращение дизелем, в промышленности — трехфазным синхронным или асинхронным двигателем. Систему «генератор — двигатель» широко применяют в металлургической промышленности для привода прокатных станов с двигателями мощностью 10 МВт и более при диапазоне регулирования частоты вращения 1 : 200 и точности поддержания заданной частоты вращения (погрешности) менее 1%. В рассматриваемой системе уменьшение частоты вращения производят с использованием рекуперативного торможения: сначала увеличивая ток возбуждения двигателя, а затем постепенно уменьшая ток возбуждения генератора, можно перевести двигатель в генераторный режим и быстро затормозить механизм. При этом накопленная кинетическая энергия якоря и механизма отдается в электрическую сеть. Если нагрузка толчкообразная, то иногда на валу первичного двигателя, вращающего генератор, ставят маховик, который уменьшает перегрузки первичного двигателя. Недостатки системы «генератор — двигатель» — большие масса, габариты, высокая стоимость установки; сравнительно низкий КПД (примерно 0,6 . 0,7), так как производится трехкратное преобразование энергии.

рис. 7.29. Схема «генератор—двигатель»
В последнее время на транспорте (в тепловозах, больших автомобилях, кораблях) вместо генератора постоянного тока в системе «генератор — двигатель» применяют синхронный генератор с полупроводниковым выпрямителем. Это позволяет снизить массу и уменьшить стоимость генератора. В промышленных установках такое усовершенствование обычно не применяется, так как для рекуперативного торможения требуется управляемый выпрямитель-инвертор, в связи с чем выгоднее перейти к схеме «управляемый выпрямитель — двигатель», исключив генератор и первичный двигатель.
Регулирование по системе «управляемый выпрямитель — двигатель».Развитие полупроводниковой техники позволило применить для регулирования частоты вращения двигателя управляемый выпрямитель, выполненный на тиристорах, где одновременно с выпрямлением производится регулирование выпрямленного напряжения (рис. 7.30). Применение системы «управляемый выпрямитель — двигатель» позволяет увеличить КПД и уменьшить массу установки. Если требуется быстрая остановка механизма с последующим реверсированием, то для рекуперативного торможения параллельно с выпрямителем ставят инвертор, т. е. еще один полупроводниковый преобразователь, позволяющий отдавать энергию от машины постоянного тока в сеть переменного тока. Недостаток системы «управляемый выпрямитель — двигатель» — низкий коэффициент мощности при пониженном выходном напряжении. Кроме того, из-за пульсаций напряжения возникают пульсации тока, что ухудшает работу двигателя: возрастают потери, ухудшается коммутация и т. д. Особенно велики пульсации тока при питании от сети однофазного тока (в электровозах переменного тока), где обеспечение удовлетворительной коммутации — серьезная проблема.

Тиристорно-импульсное регулирование. При управлении тяговыми двигателями возникает необходимость регулировать возбуждение тягового двигателя, как правило, в трех случаях:
1) в начальной стадии пуска для получения более плавного нарастания силы тяги. Для этого в момент подключения двигателей к источнику питания осуществляют максимальное или частичное ослабление возбуждения с последующим его усилением до полного возбуждения;
2) в заключительной стадии пуска для увеличения скорости движения подвижного состава. С этой целью после достижения полного напряжения на двигателях постепенно ослабляют магнитное поле (уменьшают ток возбуждения) до предельного или промежуточного значения коэффициента регулирования возбуждения а = Iв/Iя;
3) в начальной стадии электрического торможения (как рекуперативного, так и реостатного) с целью ограничения напряжения на двигателях при высоких скоростях движения, а также для более плавного нарастания тормозной силы. Для этого вначале торможение осуществляется при ослабленном возбуждении с последующим постепенным усилением его до полного (а=1).
Все указанные режимы регулирования возбуждения двигателей могут с успехом осуществляться при тиристорно-импульсном управлении. В метровагонах типа
81-717.5М/714.5М используется именно эта система. Если регулирование тока возбуждения (а следовательно и магнитного поля) двигателей при разгоне осуществляется ступенчато за счёт реостатов, то в режиме реостатного торможения регулирование уже плавное, что позволяет поддерживать максимально возможную тормозную силу до 55-60 км/ч. Это достигается за счёт применения тиристорного регулятора РТ-300/300А. Этот регулятор состоит из силового блока, блока управления и датчика тока двигателей. Силовой блок состоит из двух идентичных тиристорных ключей-фаз, каждая из которых обслуживает отдельную группу тяговых двигателей. Тиристорные ключи, помимо самих тиристоров, состоят из коммутирующих диодов, дросселей, конденсаторов и резисторов. Оба тиристорных ключа размещены в одном модуле, что располагается под вагоном. В этом же модуле размещён блок защиты, который в аварийных ситуациях отключает тиристорный регулятор, при этом на данном вагоне электрическое (реостатное) торможение не работает, остаётся только пневматическое.
Схема включения ТИР при регулировании возбуждения тягового двигателя (а) и осциллограммы (б)

Список используемой литературы:
1. Г.Г. Рекус. Общая электротехника и основы промышленной электроники. «Высшая школа», 2008 г.
2. Ю.А. Комиссаров и др. Основы элетротехники, микроэлектроники и управления. т.1 «Химия», 2007
3. Ю.М. Борисов и др. Электротехника. «Электроатомиздат» 1985 г.
4. А.С. Касаткин, М.В. Немцов. Электротехника. «Электроатомиздат», 1983 г.
5. Раздаточный материал по курсу электротехники, электроники и электрооборудованию промышленных предприятий (№3240).
Нам важно ваше мнение! Был ли полезен опубликованный материал? Да | Нет
Источник



