
3.8. Уравнивание нивелирной сети параметрическим способом
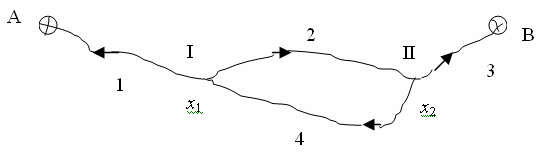
Рис. 3. Нивелирная сеть
НА = 100,000 м; НВ = 115,000 м — отметки исходных пунктов.
h (м): 5,023; 10,012; 9,990; -10,005 — измеренные превышения.
S (км): 2; 4; 4; 2 — длины ходов.
pi = c/Si: 2; 1; 1; 2 — веса результатов измерений (с = 4 ).
В данной нивелирной сети число измерений n = 4, число необходимых измерений t = 2. Два параметра х1 и х2 — отметки вновь определяемых пунктов.
Параметрические уравнения связи составим по формуле:
Fi(x1, x2, . xt) — yi = νi.
1) (HA — x1) — h1 = ν1; 3) (HB — x2) — h3 = ν3;
2) (x2 — x1) — h2 = ν2; 4) (x1 — x2) — h4 = ν4
— параметрические уравнения связи.
Определим приближенные значения параметров:
х01 = НА — h1 = 94,977 м; x02 = HB — h3 = 105,010 м.
x1 = х01 + δх1 и x2 = x02 + δx2 подставим в систему параметрических уравнений связи.
1) (HA — x01 — δx1) — h1 = ν1; 3) (HB — x02 — δx2) — h3 = ν3;
2) (x02 + δx2 — x01 — δx1) — h2 = ν2; 4) (x01 + δx1 — x02 — δx2) — h4 = ν4.
Переходим к параметрическим уравнениям поправок:

Свободные члены li = Fi(x10, x20, . xt0) — yi, (i = 1, 2, . n) выразим в сантиметрах или в миллиметрах для того, чтобы порядок коэффициентов и свободных членов был одинаков.
1) -δx1 + l1 = v1; l1 = HA — x01 — h1 = 0;
2) δx2 — δx1 + l2 = v2; l2 = x02 — x01 — h2 = 2,1 см;
3) -δx2 + l3 = v3; l3 = HB — x02 — h3 = 0;
4) δx1 — δx2 + l4 = v4; l4 = x01 — x02 — h4= -2,8 см.
Переходим к системе нормальных уравнений:

Коэффициенты и свободные члены параметрических уравнений поправок поместим в табл. 10.
Таблица параметрических уравнений поправок

Система нормальных уравнений имеет вид:

Решение системы нормальных уравнений с определением элементов обратной матрицы выполним в схеме Гаусса (табл. 10).
Решение нормальных уравнений

Контроль δхj: Контроль Qij: 2 · 0,364 + 0,273 — 1 = 0,001;
2 · 0,700 — 1,400 = 0. 2 · 0,273 + 0,455 — 1 = 0,001.
Вычислим значение параметров:
x1 = x10 + δx1 = 94,9840 м; x2 = x20 + δx2 = 104,9960 м.
Вычислим уравненные результаты измерений, делаем контроль уравнивания (табл. 12).
Уравненные превышения. Контроль уравнивания
Сделаем оценку точности результатов измерений по материалам уравнивания:
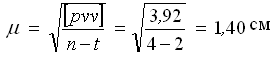
— средняя квадратическая ошибка единицы веса (превышения по ходу в 4 км).

— средняя квадратическая ошибка на 1 км хода.
Оценку точности параметров и функции параметров выполним с использованием элементов обратной матрицы
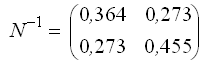
по формулам (38) и (37):
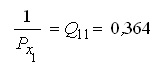 — обратный вес первого параметра.
— обратный вес первого параметра.
 см — средняя квадратическая ошибка первого параметра.
см — средняя квадратическая ошибка первого параметра.
 — обратный вес второго параметра.
— обратный вес второго параметра.
 см — средняя квадратическая ошибка второго параметра.
см — средняя квадратическая ошибка второго параметра.
 — весовая функция — второе уравненное превышение.
— весовая функция — второе уравненное превышение.
 — коэффициенты функции.
— коэффициенты функции.

— обратный вес функции.
 см — средняя квадратическая ошибка функции.
см — средняя квадратическая ошибка функции.
Тут вы можете оставить комментарий к выбранному абзацу или сообщить об ошибке.
Источник
Уравнивание нивелирной сети параметрическим способом
Рис. 3. Нивелирная сеть
НА = 100,000 м; НВ = 115,000 м — отметки исходных пунктов.
h (м): 5,023; 10,012; 9,990; -10,005 — измеренные превышения.
S (км): 2; 4; 4; 2 — длины ходов.
pi = c/Si: 2; 1; 1; 2 — веса результатов измерений (с = 4 ).
В данной нивелирной сети число измерений n = 4, число необходимых измерений t = 2. Два параметра х1 и х2 — отметки вновь определяемых пунктов.
Параметрические уравнения связи составим по формуле:
— параметрические уравнения связи.
Определим приближенные значения параметров:
x1 = х 0 1 + δх1 и x2 = x 0 2 + δx2 подставим в систему параметрических уравнений связи.
Переходим к параметрическим уравнениям поправок:

Свободные члены li = Fi(x1 0 , x2 0 , . xt 0 ) — yi, (i = 1, 2, . n) выразим в сантиметрах или в миллиметрах для того, чтобы порядок коэффициентов и свободных членов был одинаков.
Переходим к системе нормальных уравнений:
Коэффициенты и свободные члены параметрических уравнений поправок поместим в табл. 10.
Таблица параметрических уравнений поправок
Система нормальных уравнений имеет вид:
Решение системы нормальных уравнений с определением элементов обратной матрицы выполним в схеме Гаусса (табл. 10).
Решение нормальных уравнений
Контроль δхj: Контроль Qij: 2 · 0,364 + 0,273 — 1 = 0,001;
2 · 0,700 — 1,400 = 0. 2 · 0,273 + 0,455 — 1 = 0,001.
Вычислим значение параметров:
Вычислим уравненные результаты измерений, делаем контроль уравнивания (табл. 12).
Уравненные превышения. Контроль уравнивания
| № п/п | hi + vi | F(x1, x2) | № п/п | hi + vi | F(x1, x2) |
| 5,0160 | НА — х1 | 5,0160 | 10,0040 | НВ — х2 | 10,0040 |
| 10,0120 | х2 — х1 | 10,0120 | -10,0120 | х1 — х2 | -10,0120 |
Сделаем оценку точности результатов измерений по материалам уравнивания:
— средняя квадратическая ошибка единицы веса (превышения по ходу в 4 км).
— средняя квадратическая ошибка на 1 км хода.
Оценку точности параметров и функции параметров выполним с использованием элементов обратной матрицы

по формулам (38) и (37):
 — обратный вес первого параметра.
— обратный вес первого параметра.
 см — средняя квадратическая ошибка первого параметра.
см — средняя квадратическая ошибка первого параметра.
 — обратный вес второго параметра.
— обратный вес второго параметра.
 см — средняя квадратическая ошибка второго параметра.
см — средняя квадратическая ошибка второго параметра.
 — весовая функция — второе уравненное превышение.
— весовая функция — второе уравненное превышение.
 — коэффициенты функции.
— коэффициенты функции.

— обратный вес функции.
 см — средняя квадратическая ошибка функции.
см — средняя квадратическая ошибка функции.
Источник
Уравнивание нивелирных сетей (Глава 2 дипломного проекта)
Страницы работы




Содержание работы
2. УРАВНИВАНИЕ НИВЕЛИРНЫХ СЕТЕЙ
2.1. Параметрический способ
Будем уравнивать нивелирную сеть по методу наименьших квадратов (МНК). Если результаты измерений неравноточны и известны их веса рi, то принцип наименьших квадратов имеет вид
 (17)
(17)
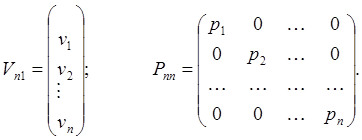
Введем вектор поправок к измеренным величинам и диагональную матрицу весов результатов измерений
 (18)
(18)
Тогда выражение (17) примет вид
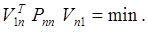 (19)
(19)
Существует два основных способа уравнивания – параметрический и коррелатный способы. Главная разница между этими способами заключается в различии типов исходных уравнений, решаемых на основе принципа наименьших квадратов.
Параметрический способ уравнивания заключается в том, что уравненные значения измеренных величин получаются из решения по методу наименьших квадратов уравнений, связывающих уравненные величины с системой функционально независимых аргументов, именуемых параметрами.
Рассмотрим порядок уравнивания параметрическим способом. Пусть независимо измерены n величин и при этом получены результаты y1, y2, … , yn с весами p1, p2, … , pn, соответственно. Надо произвести параметрическое уравнивание результатов измерений, в итоге которого должны быть получены значения независимых параметров x1, x2, … , xtи уравненные значения измеренных величин y1, y2, …, yn.
 (20)
(20)
Здесь vi– поправки к результатам измерений.
Выбирают независимые параметры ,количество которых должно быть равно числу необходимых измерений t:
Представляют каждое уравненное значение измеренной величины как функцию искомых параметров

 с весом
с весом  (21)
(21)
Выражения (21) называют параметрическими уравнениями связи. Искомые величины в них являются параметры x. Важную роль играет выбор независимых параметров. При выборе нужно учитывать, чтобы функции параметров уравнений были по возможности более простыми.
В ряде случаев эти уравнения имеют нелинейный вид относительно искомых параметров xj, что затрудняет их непосредственное решение по методу наименьших квадратов. В связи с этим, уравнения (21) приводят к линейному виду, что называется линеаризацией. Для выполнения линеаризации вводят приближенные значения параметров –  . Тогда окончательные их значения будут равны
. Тогда окончательные их значения будут равны
 (22)
(22)
Здесь dxj — поправки, определяемые из уравнивания.
Подставляя в (21) вместо xj их значения из (22) получаем выражения
 (23)
(23)
Полагая, что поправки dxj достаточно малы, по сравнению с xj, разлагаем эти выражения в ряд Тейлора и ограничиваемся членами первого порядка малости
 (24)
(24)
Частные производные здесь вычисляются при значениях аргументов .


Тогда выражения (24) примут вид
 (26)
(26)
Это параметрические уравнения связи, представленные в линейном виде, которые называются параметрическими уравнениями поправок. Коэффициентами этих уравнений являются частные производные функций по соответствующим параметрам. Свободными членами этих уравнений являются разности между функциями приближенных значений параметров и результатами измерений.
Введем матрицу коэффициентов параметрических уравнений поправок Аnt, вектор свободных членов Ln1 и вектор неизвестных Хt1

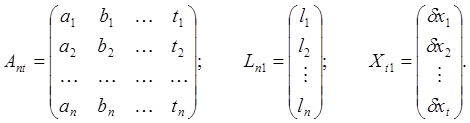 (27)
(27)
Принимая во внимание эти обозначения, а также обозначения (18) , представляем систему параметрических уравнений поправок (26) в виде матричного уравнения
 (28)
(28)
Решение матричного уравнения (28) подчиним условию наименьших квадратов

которое, в соответствии с (28), представим так
 . (29)
. (29)

и введем обозначения
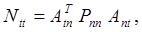 (30)
(30)
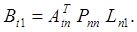 (31)
(31)
Тогда выражение (29) примет вид

Здесь учтено, что 
Выражение  представляет собой скаляр, а потому
представляет собой скаляр, а потому
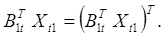
Принимая это во внимание, можем написать окончательно
 (32)
(32)
Транспонируя левую в правую части равенства (30), убеждаемся, что
 (33)
(33)
то есть матрица Ntt симметричная.
Для определения вектора Xt1, удовлетворяющего условию наименьших квадратов, произведем дифференцирование выражения (32) по этому вектору и приравняем полученный результат нулевому вектору.
Пользуясь правилами дифференцирования по вектору, получаем
или, после транспонирования и деления на 2,
Источник



