
- Способы определения координат в ГНСС
- Относительном способе определения координат с использованием спутниковой аппаратуры измеряют
- Методы определения абсолютных координат
- Методы определения относительных координат
- Режимы спутниковых определений
- Относительный спутниковый метод создания координатной основы. Принципиальные отличия его от традиционных методов
Способы определения координат в ГНСС
Различают два метода определения координат точек в ГНСС — это относительные и абсолютные.
Абсолютные — это способы, в которых по измеренным величинам вычисляются сами значения координат.
Относительные — способы, в которых по проведенным измерениям можно вычислить только приращения координат, то есть базовые векторы в пространстве, которые соединяют пункты наблюдений.
Особенности измерений в абсолютных и относительных способах:
• Абсолютные способы определения координат пунктов подразделяются на автономный и дифференциальный способы. Дифференциальные способы обычно основаны на фазовых и кодовых определениях;
• Относительные способы нахождения пространственных векторов (базовых линий) делятся на кинематические и статические способы.
Статические способы подразделяются на статику, псевдостатику и ускоренную статику.
Кинематические способы подразделяются на непрерывную кинематику с постобработкой «стой и иди» и кинематику в реальном времени.
Точность этих способов значительно отличается: от миллиметров 10-ков метров. В зависимости от требований предъявляемых к точности используются разные способы определения положения точки. Самыми точными являются относительные и дифференциальные способы. При абсолютных измерениях позиционирование имеет погрешность в несколько метров.
Автономное нахождение координат. В этом способе позиционирование происходит с использованием объёмной линейной засечки по кодовым псевдодальностям, определенным до 4-х и большего количества спутников (необходимо для увеличения правдивости данных). Способ называется автономным, потому что смотрящий находит положение точки независимо от измерений на других станциях. На правдивость этого способа очень сильное влияниеоказывают искажения, которые влияют на правдивость измерений. Сегодня точность абсолютного определения положения автономным способом имеет ошибку до пяти-десяти метров. Для приемников имеющих две частоты точность немного выше. Высоты определяются очень грубо, и это является существенным недостатком.
Дифференциальный способ. В этом методе измерения выполняются в одно время двумя приемниками. Для этого в приемниках должна присутствовать возможность применения дифференциального режима. Один приемник располагается на точке, данные о которой заранее определены. Такую станцию называют базовой или референц-станцией. Другой приемник, подвижный, размещается над точкой, координаты которой необходимо определить. Так как местоположение референц-станции известно, то его используют для сравнения с вновь определяемым и исходя из этого находят исправления для подвижной (rover) станции.
Способ статики считается наиболее точным и сложным в исполнении. От продолжительности измерений зависит точность. Например, проводя измерения в течение 5 минут будет достигнута точность в десять сантиметров. Чаще длительность измерений на станции составляет около 1 часа. В это время накапливаются результаты измерений, которые выполняются в интервалы от 1-ой секунды до 5-ти минут.
Относительные измерения бывают кинематические и статические. При любом из этих режимов один приемник устанавливается на точку с известным местоположением, а другие на точках, местоположение которых необходимо определить.
Статический режим наблюдений чаще всего используется при построении геодезических сетей, так как имеет наиболее высокую точность. Требует больших временных затрат. В зависимости от необходимой точности измерения на станции могут длиться от одного часа до нескольких часов. В этом режиме применяется постобработка и специальное программное обеспечение. Длительность наблюдений зависит от необходимой точности, длины базовой линии и приемника, которым выполняют измерения. Пункты наблюдений подбираются так, чтобы сигналу со спутника не мешали деревья, здания и тому подобное. Ясная погода является наиболее благоприятной для проведения измерений. Для повышения точности позиционирования увеличивают длительность измерений.
Быстрая статика. Применяя данный способ продолжительность наблюдений может длиться не более 10-20 минут. Данный способ применяется на коротких основных линиях.
Для сокращения времени измерений выполняют одновременное наблюдение спутников разных ГНСС
Кинематика. Различают два режима: непрерывный и с остановками. Необходимо два приемника, как и в статическом режиме измерений. Один приемник работает как основная станция, а другой передвигается по точкам, координаты которых необходимо определить. В этом режиме продолжительность измерений очень мала, примерно 1 минута. Метод работает только при наличии бесперебойного поступления информации со спутников.
Кинематика в реальном времени (режим RTK – Real Time Kinematics). Данный режим используется тогда, когда нужно получать координаты непосредственно в процессе измерений. В RTK один приемник служит базовой станцией и ставится на начальном пункте с известным местоположением. Другой приемник передвигается по точкам, местоположение которых нужно определить.
Источник
Относительном способе определения координат с использованием спутниковой аппаратуры измеряют

Спутниковые определения местоположения это определения координат точек пространственных объектов или приращений (разностей) координат между точками, включающее процессы измерения (наблюдения) и обработки измерительной информации, поступающей со спутников ГНСС. Процесс спутниковых наблюдений (наблюдений навигационных спутников) включает в себя прием и первичную обработку измерительной информации от спутников ГНСС с помощью специальной спутниковой аппаратуры. Обработка данных спутниковых наблюдений (постобработка) заключается в математической обработке результатов спутниковых наблюдений по определенному алгоритму с целью вычисления координат или приращений (разностей) координат.
Существует несколько спутниковых методов определения местоположения с помощью ГНСС. Они делятся на методы определения абсолютных координат и методы определения относительных координат. Точность методов спутниковых определений местоположения приведена на диаграмме.

Методы определения абсолютных координат
Автономный метод определений — метод спутниковых определений с использованием бортовой эфемеридно-временной информации:
- Метод пространственной линейной засечки. Реализуется по измерениям кода сигналов ГНСС и вычислениям псевдодальностей до спутников (навигационный режим — navigation mode ). Автономный метод позволяет получение координат в земной геоцентрической системе или отнесенных к земному эллипсоиду в режиме реального времени. Точность определения координат автономным методом составляет в среднем 5-10 метров.
Абсолютные методы определений — методы спутниковых определений с использованием поправок к эфемеридно-временной информации:
- Метод с использованием поправок к эфемеридной и временной информации, поправок для исключения атмосферных искажений сигнала, поправок к навигационным параметрам, измеряемым потребителем (кодовые измерения). Реализуется с использованием широкозонных систем дифференциальной коррекции функциональных дополнений ГНСС (Wide area differential GNSS), таких как СДКМ, WAAS, EGNOS, MSAS, GAGAN. Точность определения координат с помощью широкозонных систем дифференциальной коррекции около 0,5 — 2 метров.
- Метод с использованием поправок к эфемеридной и временной информации, поправок для исключения атмосферных искажений сигналов ГНСС, поправок к навигационным параметрам, измеряемым потребителем (фазовые измерения) (Precise Point Positioning; PPP). Реализуется с использованием глобальных систем дифференциальной коррекции функциональных дополнений ГНСС. Точность определения координат методом PPP может варьироваться от нескольких дециметров до одного сантиметра в зависимости от способа обработки и объема выборки исходных данных.
Методы определения относительных координат
Дифференциальные методы — методы спутниковых определений с использованием корректирующей информации к навигационным параметрам, измеряемым потребителем) в режиме реального времени:
- Метод с вычислением псевдодальностей по измерениям кода сигналов ГНСС (DGPS, DGNSS). Реализуется с использованием региональных дифференциальных систем функциональных дополнений ГНСС. Точность определения относительных координат около 0,5 метров.
- Метод с вычислением псевдодальностей по измерениям фазы несущей сигналов ГНСС (Real Time Kinematic; RTK). Реализуется с использованием локальных дифференциальных систем функциональных дополнений ГНСС в режиме реального времени. Точность определения относительных координат составляет 1-5 сантиметров .
Относительные методы — методы определения разности координат при постобработке данных синхронных сеансов спутниковых наблюдений :
- Метод определения разности координат при постобработке данных синхронных сеансов спутниковых измерений кода сигналов ГНСС. При этом точность определения относительных координат составляет несколько дециметров.
- Метод определения разности координат при постобработке данных синхронных сеансов спутниковых измерений фазы несущей сигналов ГНСС. При этом можно достичь наивысшую точность спутниковых определений, вплоть до миллиметрового порядка.
Режимы спутниковых определений
При спутниковых определениях также используют несколько режимов:
Static (статический режим) — режим спутниковых определений с использованием неподвижной спутниковой геодезической аппаратуры.
Kinematic mode (кинематический режим) — режим спутниковых определений с использованием подвижной спутниковой геодезической аппаратуры.
Navigation mode (навигационный режим) — автономный режим спутниковых определений.
DGNSS (Differential mode) — дифференциальный режим спутниковых определений c использованием кодовой спутниковой корректирующей информации от дифференциальной станции в реальном времени .
RTK (Real Time Kinematic) — режим спутниковых определений c использованием фазовой спутниковой корректирующей информации от дифференциальной станции в реальном времени .
Network RTK — режим спутниковых определений c использованием интегрированной спутниковой корректирующей информации сети дифференциальных станций в реальном времени .
Postprocessing mode (режим с постобработкой) — режим спутниковых определений с вычислением координат в процессе последующей обработки.
FastStatic (Быстрый статический режим) — режим спутниковых определений аналогичный статическому с использованием только двухчастотной спутниковой геодезической аппаратуры на ограниченном расстоянии между точками спутниковых наблюдений и с постобработкой.
Reoccupation (Реоккупация) — режим спутниковых определений с повторными статическими спутниковыми наблюдениями на точках в течении одного сеанса с помощью подвижной спутниковой геодезической аппаратуры и с постобработкой.
Stop&Go («Стой и иди») — режим спутниковых определений с статическими спутниковыми наблюдениями на точках в течении одного сеанса с помощью подвижной спутниковой геодезической аппаратуры и с постобработкой.
Continuous kinematic («Непрерывная кинематика») — режим спутниковых определений точек в течении одного сеанса с помощью подвижной спутниковой геодезической аппаратуры и с постобработкой.
Информационный ресурс по технологиям высокоточного позиционирования с использованием Глобальных Спутниковых Навигационных Систем (ГНСС)
Источник
Относительный спутниковый метод создания координатной основы. Принципиальные отличия его от традиционных методов
Глобальная навигационная спутниковая система (ГНСС) — система, состоящая из созвездия навигационных спутников, службы контроля и управления и аппаратуры пользователей, позволяющая
СРНС предназначены для надежного, высокоточного, независимого от времени суток, помех, погоды и расположения на земном шаре определения координат и времени
Основной принцип работы системы — определение местоположения путём измерения расстояний до объекта от точек с известными координатами — спутников. Каждый спутник непрерывно передает сигналы строго определенного вида, несущие информацию о времени и положении спутника в пространстве. Специальный приемник этих сигналов принимает и декодирует информацию от спутника, измеряет расстояние до него, находит из обработки (пространственная обратная линейная засечка) свое положение и точное время.
Расстояние вычисляется по времени задержки распространения сигнала от посылки его спутником до приёма антенной GPS-приёмника. То есть, для определения трёхмерных координат GPS-приёмнику нужно знать расстояние до трёх спутников и время GPS системы. Таким образом, для определения координат и высоты приёмника, используются сигналы как минимум с четырёх спутников.
система, разработана и эксплуатируется МО РФ. Работает по аналогичному принципу, что и GPS.
СРНС включает в себя три сегмента:
— космический с орбитальной группировкой навигационных спутников;
— наземный комплекс управления и контроля;
Методы определения координат: абсолютный, дифференциальный и относительный метод определения координат.
В абсолютном методе координаты поучаются одним приемником в системе координат спутники навигационной системы. При этом реализуется метод засечки положения приемника от известных положений космических аппаратов (КА). Часто это метод называют также точечным позиционированием.
В дифференциальном и относительном методе наблюдения производят не менее чем с двух приемников, один из которых располагается на опорном пункте с известными координатами, а второй совмещен с определяемым объектом.
В дифференциальном методе по результатам наблюдений на опорном пункте отыскиваются поправки к соответствующим параметрам наблюдений или координатам для неизвестного пункта. Этот метод обеспечивает мгновенные решения, обычно называемые как решения в реальном времени, в которых достигается улучшенная точность по отношению к опорной станции.
СУЩНОСТЬ ОТНОСИТЕЛЬНОГО МЕТОДА ПОЗИЦИОНИРОВАНИЯ
Относительное позиционирование применяют для определения взаимного положения исходного пункта и определяемого объекта на сантиметровом и более высоком уровне точности, в зависимости от используемого метода позиционирования.
В относительном методе наблюдения, сделанные одновременно на опорном и определяемом пунктах, обрабатываются совместно. Это значительно повышает точность решений, но исключает мгновенные решения. В относительном методе определяется вектор, соединяющий опорный и определяемый пункты, называемый вектором базовой линии.
Статическое относительное позиционирование по фазе несущей является самым точным методом позиционирования и наиболее часто используется геодезистами. Этот метод предназначен для определения вектора базовой линии между двумя стационарными приемниками. В статических съемках достижимы точности 10 -6 -10 -7 и даже лучше, что эквивалентно миллиметровой точности на базовых линиях в несколько километров.
Принципиальное отличие относительного спутникового и традиционных методов построение ГГС:
Ø В классической геодезии измерения производятся относительно отвесной линии (или поверхности геоида) — в основе измерений лежит физический принцип измерений. В результате, геодезические сети, построенные классическими методами, делятся на плановые и высотные сети
Ø В основе спутниковых методов лежит геометрический принцип измерений, когда измеряются расстояния, являющиеся инвариантными величинами относительно систем координат и не дающие связь с геоидом.
Таким образом эта основная (принципиальная) проблема приводит к 2-м проблемам практического плана:
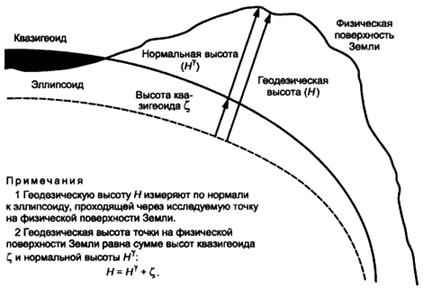
Проблема №1 — Определения нормальной высоты из ГНСС-измерений (см. Рис 1):
 |
 |
Для определения нормальной высотыпо измеренной спутниковым методом геодезической (эллипсоидальной)высоты H в каждой точке измерений должна быть с соответствующей точностью известна величина отстояния (ондуляция) геоида (квазигеоида) от эллипсоида ς :
H – известна с высокой точностью (см.)
— требуется определить с высокой точностью (см.)
Точность ς – высоты геоида (квазигеоида) на эллипсоидом необходимо определить с высокой точнсотью (см.)для получения нормальных высот на основе спутниковых ГНСС-измерений
Проблема №2 – Преобразование координат, определенных спутниковым относительным методом (с высокой точностью) с помощью ГНСС-измерений в гомогенных (однородных) геоцентрических системах координат (ITRF, WGS-84, ПЗ-90.11) из-за низкой гомогенности (точности, однородности) референцных систем координат (СК) СК-42, СК-95, МСК, СК-63 невозможно с точностью, соответствующей точности ГНСС-измерений преобразовать по глобальным пармаетрам (единым для всей страны) в эти референцные СК, в которых выполняются практические геодезические работы.
Поэтому вынужденно применяются локальные параметры трансформации для отдельных небольших участков работ и выполняются дополнитеьные (вспомогательные) работы по определению координат опорных пунктов в геоцентрических СК, что снижает произволительность работ методом ГНСС-измерений и понижает исходную точность ГНСС-измерений до точности референцных систем координат
6. Достоинства и недостатки современных методов создания ГОГС(достоинства и недостатки спутниковых технологий)
Достоинства:
1. Широкий диапазон точностей — от единиц метров до субсантиметров практически на любых расстояниях. Наблюдение высоких целей ослабляет влияние атмосферы. Выигрыш в точности от этого достигает 1-2 порядка.
2. При построении геодезических сетей отпадает необходимость в прямой видимости между пунктами. Поэтому не нужно строить высокие знаки-сигналы, выбирая места на возвышенностях. Строительство знаков занимало в геодезии до 80% от стоимости работ. Новые пункты закладывают в местах, удобных для подъезда.
3. Повышение производительности спутниковых технологий, по сравнению с обычными технологиями, в 10-15 раз.
4. Выполнение кинематических измерений, то есть измерений в движении. Особенно ценно применение таких методов в морской геодезии, аэрофотосъемке.
5. Обеспечение непрерывных наблюдений, например, для мониторинга деформаций в режиме реального времени.
6. Одновременно могут определяться три координаты. Деление классических геодезических сетей на плановые и высотные привело к тому, что на пунктах триангуляции оказываются грубые высотные отметки, а на реперах отсутствуют плановые координаты.
7. Благодаря высокому уровню автоматизации, обеспечиваются быстрота обработки, уменьшение субъективных ошибок.
8. Почти полная независимость от погоды
Недостатки:
1. Проблема преобразования высот и координат в локальную геодезическую систему, в том числе невозможность непосредственно из измерений получить нормальные высоты.
2. Зависимость от препятствий и радиопомех. Спутниковые методы невозможно применять под землей, есть сложности применения в закрытой местности (лес, плотная городская застройка, узкие ущелья)
3. Точность определения высот в 2-5 раз уступает точности определения плановых координат
4. Высокая стоимость оборудования
7. Современная структура (схема) государственной координатной основы, включающая спутниковые и традиционные геодезические сети(Характеристика государственных плановых геодезических сетей 1, 2, 3, 4 классов).
Современная структура государственной координатной основы Российской Федерации включает в себя как спутниковую высокоточную геодезическую сеть(СВГС), так и традиционную государственную геодезическую сеть (ГГС) 1, 2, 3, 4 классов, модернизированную на основе СВГС.
Спутниковая высокоточная геодезическая сеть (СВГС)является в структуре современной координатной основы РВ геодезическим построением высшей точности и включает в себя:
ФАГС — (фундаментальная астрономо-геодезическая сеть) служит исходной основой для распространения с высокой точностью на территории России общеземной геоцентрической системы координат
ВГС (высокоточная геодезическая сеть) служит:
· для распространения на всю территорию страны общеземной системы координат
· для уточнения параметров взаимного ориентирования общеземной и референцной систем координат
· для создания высокоточных карт высот квазигеоида и схем уклонений отвесной линии
Спутниковая геодезическая сеть 1-го класса – СГС-1 занимает третий уровень в современной структуре ГГС и служит для обеспечения оптимальных условий реализации точностных и оперативных озможностей спутниковой аппаратуры при переводе геодезического обеспечения территории России на спутниковые методы определения координат
Характеристики СВГС:
| Класс сети | Расстояние между пунктами (км) | Абсолютная точность (см) | Взаимная точность (см) | Нормальная высота Hϒ | Ускорение силы тяжести | Связь с пунктами |
| ФАГС | 650-1000 | 10 — 15 см | 1 в плане 3 по высоте | геометрическим нивелированием не ниже II класса точности | абсолютные значения С.Т. с СКО 5 -7 мкГал | IGS, с ближайшими АГС с СКО ≤ 2 см по каждой координате |
| ВГС | 150-300 (в обжитых) 300-500 в необжитых) | 1-2 в плане 3 по высоте | ДА к нивелирной сети I- II классов | ДА | смежными пунктами ВГС и не менее чем 3 пунктов ФАГС, с ближайшими АГС с СКО ≤ 2 см по каждой координате | |
| СГС-1 | 15-25 (в обжитых) 25-50 (в необжитых) | 1-2 в плане 3 по высоте | ДА, с точностью нивелирования II- III классов | НЕТ | ближайшими пунктами ВГС и АГС с СКО ≤ 2 см по каждой координате |

Государственная геодезическую сеть (ГГС) 1, 2, 3, 4 классов, входящая в структуру координатной основы РФ является улучшенной, модернизированной версией ГГС. Модернизация ГГС заключается в ее уточнении, осуществленном в процессе нового уравнивания 2011 года, где в качестве исходных были использованы пункты высокоточной СВГС (ФАГС, ВГС, СГС-1). В результате этого уравнивания в РФ введена новая государственная система координат ГСК-20011 и все пункты координатной основы страны (ФАГС, ВГС, СГС-1, ГГС 1-4 классов) получили оординаты в ГСК-2011.


Недостатком проведенной модернизации ГГС 1, 2, 3, 4 классов является то, что уравнивание выполнено с использованием традиционных геодезических измерений, выполненных в при развитии ГГС традиционными методами (триангуляции и трилатерации), содержащих в себе значительное количество ошибок и не соответствующих современным требованиям к точности измерений. (Правильным решением было бы переуравнять ГГС на основе измерений, выполненных современными способами – ГНСС).
8. Основная проблема, возникающая при согласовании существующей государственной плановой и высотной основы с результатами спутниковых координатных определений.
Основная проблема, возникающая при согласовании существующей государственной плановой и высотной основы с результатами спутниковых координатных определений вытекает из принципиального различия между классическими (традиционными) и спутниковыми методами развития ГГС
Ø В классической геодезии измерения производятся относительно отвесной линии (или поверхности геоида) — в основе измерений лежит физический принцип измерений. В результате, геодезические сети, построенные классическими методами, делятся на плановые и высотные сети
Ø В основе спутниковых методов лежит геометрический принцип измерений, когда измеряются расстояния, являющиеся инвариантными величинами относительно систем координат и не дающие связь с геоидом.
Таким образом эта основная (принципиальная) проблема приводит к 2-м проблемам практического плана:
Проблема №1 — Определения нормальной высоты из ГНСС-измерений (см. Рис 1):

| |
| |
Для определения нормальной высотыпо измеренной спутниковым методом геодезической (эллипсоидальной)высоты H в каждой точке измерений должна быть с соответствующей точностью известна величина отстояния (ондуляция) геоида (квазигеоида) от эллипсоида ς :
H – известна с высокой точностью (см.)
— требуется определить с высокой точностью (см.)
Точность ς – высоты геоида (квазигеоида) на эллипсоидом необходимо определить с высокой точнсотью (см.)для получения нормальных высот на основе спутниковых ГНСС-измерений
Проблема №2 – Преобразование координат, определенных спутниковым относительным методом (с высокой точностью) с помощью ГНСС-измерений в гомогенных (однородных) геоцентрических системах координат (ITRF, WGS-84, ПЗ-90.11) из-за низкой гомогенности (точности, однородности) референцных систем координат (СК) СК-42, СК-95, МСК, СК-63 невозможно с точностью, соответствующей точности ГНСС-измерений преобразовать по глобальным пармаетрам (единым для всей страны) в эти референцные СК, в которых выполняются практические геодезические работы.
Поэтому вынужденно применяются локальные параметры трансформации для отдельных небольших участков работ и выполняются дополнитеьные (вспомогательные) работы по определению координат опорных пунктов в геоцентрических СК, что снижает произволительность работ методом ГНСС-измерений и понижает исходную точность ГНСС-измерений до точности референцных систем координат
9. Понятие «система координат (reference system)» и «координатная основа (reference frame)». (Координатная система и координатная основа)
Координатная система (Reference System) — теоретически декларируемая математическая модель отсчета координат
Ø Вид координат (плоские прямоугольные, пространственные прямоугольные, криволинейные, сферические, эллипсоидальные (геодезические), и т.д.)
Ø Положение начала координат (в центре масс Земли, на поверхности эллипсоида)
Ø Ориентировка оси аппликат или основной координатной плоскости, содержащей ось абсцисс и ординат (левая, правая)
Ø Ориентировка оси абсцисс
Координатная основа (Reference Frame) — физическая реализация координатной системы в реальном мире с помощью закрепленных точек (пунктов) и каталогов координат этих точек (пунктов) в данной координатной системе
ГГС РФ — физическая реализация координатной системы РФ, координатная основа РФ
Источник



