
Регулирование скорости двигателей постоянного тока
 Из уравнения электромеханической характеристики двигателя постоянного тока независимого возбуждения следует, что возможны три способа регулирования его угловой скорости:
Из уравнения электромеханической характеристики двигателя постоянного тока независимого возбуждения следует, что возможны три способа регулирования его угловой скорости:
1) регулирование за счет изменения величины сопротивления реостата в цепи якоря,
2) регулирование за счет изменения потока возбуждения двигателя Ф,
3) регулирование за счет изменения подводимого к обмотке якоря двигателя напряжения U . Ток в цепи якоря I я и момент М, развиваемый двигателем, зависят только от величины нагрузки на его валу.
Рассмотрим первый способ регулирования скорости двигателя постоянного тока изменением сопротивления в цепи якоря . Схема включения двигателя для этого случая представлена на рис. 1 , а электромеханические и механические характеристики — на рис. 2 , а.
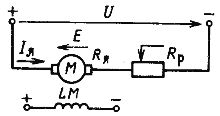
Рис. 1. Схема включения двигателя постоянного тока независимого возбуждения
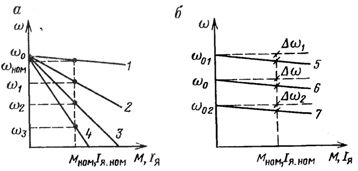
Рис. 2. Механические характеристики двигателя постоянного тока при различных сопротивлениях цепи якоря (а) и напряжениях (б)
Изменяя сопротивление реостата в цепи якоря можно получить при номинальной нагрузке различные угловые скорости электродвигателя на искусственных характеристиках — ω1, ω2, ω3.
Проведем анализ данного способа регулирования угловой скорости двигателей постоянного тока с помощью основных технико-экономических показателей. Так как при данном способе регулирования изменяется жесткость характеристик в широких пределах, то при скоростях менее половины номинальной стабильность работы двигателя резко ухудшается. По этой причине диапазон регулирования скорости ограничен ( D = 2 — З).
Скорость при данном способе можно регулировать в сторону уменьшения от основной, о чем свидетельствуют электромеханические и механические характеристики. Высокую плавность регулирования трудно обеспечить, так как потребовалось бы значительное количество ступеней регулирования и соответственно большое число контакторов. Полное использование двигателя по току (нагреву) в этом случае достигается при регулировании с постоянным моментом нагрузки.
Недостатком рассматриваемого способа является наличие значительных потерь мощности при регулировании, которые пропорциональны относительному изменению угловой скорости. Достоинством рассмотренного способа регулирования угловой скорости являются простота и надежность схемы управления.
Учитывая большие потери в реостате при малых скоростях, данный способ регулирования скорости применяется для приводов с кратковременным и повторно-кратковременным режимами работы.
 При втором способе регулирование угловой скорости двигателей постоянного тока независимого возбуждения осуществляется изменением величины магнитного потока за счет введения в цепь обмотки возбуждения дополнительного реостата. При ослаблении потока угловая скорость двигателя как при нагрузке, так и при холостом ходе возрастает, а при усилении потока — уменьшается. Практически возможно изменение скорости только в сторону увеличения ввиду насыщения двигателя.
При втором способе регулирование угловой скорости двигателей постоянного тока независимого возбуждения осуществляется изменением величины магнитного потока за счет введения в цепь обмотки возбуждения дополнительного реостата. При ослаблении потока угловая скорость двигателя как при нагрузке, так и при холостом ходе возрастает, а при усилении потока — уменьшается. Практически возможно изменение скорости только в сторону увеличения ввиду насыщения двигателя.
При увеличении скорости ослаблением потока допустимый момент двигателя постоянного тока изменяется по закону гиперболы, а мощность остается постоянной. Диапазон регулирования скорости для данного способа D = 2 — 4 .
Механические характеристики для различных значений потока двигателя приведены на рис. 2 , а и 2 , б, из которых видно, что характеристики в пределах номинального тока имеют высокую степень жесткости.
Обмотки возбуждения двигателей постоянного тока независимого возбуждения обладают значительной индуктивностью. Поэтому при ступенчатом изменении сопротивления реостата в цепи обмотки возбуждения ток, а следовательно, и поток будут изменяться по экспоненциальному закону. В связи с этим регулирование угловой скорости будет осуществляться плавно.
Существенными преимуществами данного способа регулирования скорости являются его простота и высокая экономичность.
Данный способ регулирования используют в приводах в качестве вспомогательного, обеспечивающего повышение скорости при холостом ходе механизма.
Третий способ регулирования скорости заключается в изменении напряжения, подводимого к обмотке якоря двигателя. Угловая скорость двигателя постоянного тока независимо от нагрузки изменяется прямо пропорционально напряжению, подводимому к якорю. Поскольку все регулировочные характеристики являются жесткими, а степень их жесткости остается для всех характеристик неизменной, работа двигателя является стабильной на всех угловых скоростях и, следовательно, обеспечивается широкий диапазон регулирования скорости независимо от нагрузки. Этот диапазон равен 10 и может быть расширен за счет специальных схем управления.
При данном способе угловую скорость можно уменьшать и увеличивать относительно основной. Повышение скорости ограничено возможностями источника энергии с регулируемым напряжением и U ном двигателя.
Если источник энергии обеспечивает возможность непрерывного изменения подводимого к двигателю напряжения, то регулирование скорости двигателя будет плавным.
Данный способ регулирования является экономичным, так-так регулирование угловой скорости двигателя постоянного тока независимого возбуждения осуществляется без дополнительных потерь мощности в силовой цепи якоря. По всем перечисленным выше показателям данный способ регулирования по сравнению с первым и вторым наилучший.
Если Вам понравилась эта статья, поделитесь ссылкой на неё в социальных сетях. Это сильно поможет развитию нашего сайта!
Подписывайтесь на наш канал в Telegram!
Просто пройдите по ссылке и подключитесь к каналу.
Не пропустите обновления, подпишитесь на наши соцсети:
Источник
Лекции Электропривод ГМиММ. 1. Роль электропривода в современных машинных технологиях
| Название | 1. Роль электропривода в современных машинных технологиях |
| Анкор | Лекции Электропривод ГМиММ.doc |
| Дата | 18.09.2017 |
| Размер | 3.83 Mb. |
| Формат файла |  |
| Имя файла | Лекции Электропривод ГМиММ.doc |
| Тип | Документы #8591 |
| страница | 8 из 12 |
| Подборка по базе: Деньги, их роль в экономике.docx, Практическое (семинарское) занятие № 9 Тема Культура и цивилиза, На современном этапе развития сферы туризма большую роль играют , «ПРЕДПРИНИМАТЕЛЬСТВО И ЕГО РОЛЬ В РЫНОЧНЫХ УСЛОВИЯХ ХОЗЯЙСТВОВАН, СИСТЕМА ЭЛЕКТРОПРИВОДА.docx, Какую роль в развитии медицины сыграл Фредерик Бантинг.pptx, Социология как наука, её предмет и социальная роль..doc, Прогресс производства в современных условиях связывают с достиже, План по теме Роль государства в экономике.docx, Наука и е роль в обществе.doc Регулирование скорости двигателя постоянного тока независимого возбуждения может производиться тремя способами:
При вводе добавочного сопротивления в цепь якоря скорость холостого хода суо остается неизменной, а изменяется наклон механических характеристик, т.е. уменьшается их жесткость (см. рис.5.3). Данный способ регулирования скорости в настоящее время не используется, поскольку введение добавочного сопротивления сопряжено с потерями энергии в этом сопротивлении.
Рис.5.3. Реостатные механические характеристики двигателя постоянного Основным способом регулирования скорости двигателей постоянного тока независимого возбуждения (ДПТ-НВ) является регулирование напряжения, подводимого к якорю двигателя. Изменение скорости при этом производится вниз от основной (номинальной) скорости, определяемой естественной характеристикой (рис.5.4). При уменьшении напряжения якоря уменьшается скорость холостого хода ω0, а жесткость механических характеристик остается постоянной. Повышение напряжения питания выше номинального не рекомендуется, т.к. это может ухудшить коммутацию на коллекторе. Плавность регулирования, отсутствие дополнительных потерь энергии при регулировании и высокая жесткость механических характеристик составляют основные достоинства этого способа регулирования скорости.
Рис.5.4. Механические характеристики двигателя постоянного тока независимого возбуждения при регулировании напряжения якоря Это регулирование скорости осуществляется с помощью систем ЭП; «генератор-двигатель», «тиристорный преобразователь-двигатель»
Рис 4.11. Схема включения двигателя ДПТ НВ (а) и его характеристики при регулировании напряжения (б) Система Г — Д. В этой системе якорь 4 двигателя непосредственно присоединяется к якорю 3 генератора, который вместе с приводным двигателем 1 образует электромашинный выпрямитель 2 трехфазного переменного тока в постоянный (рис. 4.12).
Рис 4.12. Схема системы Г – Д Регулирование напряжения на якоре ДПТ происходит за счет изменения тока возбуждения генератора Iвг, при регулировании которого с помощью потенциометра 8 изменяется ЭДС генератора Ег и соответственно напряжение на якоре двигателя U. Регулирование напряжения в этой системе может сочетаться с воздействием на магнитный поток двигателя, что обеспечивает двухзонное регулирование скорости. Регулирование магнитного потока двигателя осуществляется за счет включения в цепь обмотки 5 возбуждения двигателя резистора 6. В замкнутых ЭП питание обмотки 7 возбуждения генератора происходит от регулируемого источника постоянного тока, например, полупроводникового УВ. Характеристики системы Г—Д соответствуют рис. 4.11, б. Основными достоинствами системы Г — Д являются большой диапазон и плавность регулирования скорости двигателя, высокая жесткость и линейность характеристики, возможность получения всех энергетических режимов работы ДПТ, в том числе и рекуперативного торможения. В то же время для этой системы характерны такие недостатки, как утроенная установленная мощность электрических машин, низкий КПД, инерционность процесса регулирования, шум при работе. Система тиристорный преобразователь — двигатель. Основным типом преобразователей, применяемых в настоящее время в регулируемом ЭП постоянного тока, являются полупроводниковые статические преобразователи, ив первую очередь тиристорные. Они представляют собой управляемые реверсивные или нереверсивные выпрямители, собранные по нулевой или мостовой однофазной или трехфазной схеме. Определенные перспективы связаны с использованием в них транзисторов, которые в настоящее время применяются в основном для импульсного регулирования напряжения в ЭП небольшой мощности. Принцип действия, свойства и характеристики системы ТП—Д рассмотрим на примере схемы (рис: 4.13, а), в которой использован однофазный двухполупериодный нереверсивный тиристорный выпрямитель, собранный по нулевой схеме.
Рис 4.13. Схема системы ТП – Д (а) и характеристики двигателя (б) Преобразователь включает в себя согласующий трансформатор Т, имеющий две вторичные обмотки, два тиристора VS1 и VS2, сглаживающий реактор L и систему импульсно-фазового управления тиристорами СИФУ. Преобразователь обеспечивает регулирование напряжения на двигателе за счет изменения среднего значения ЭДС преобразователя Еn. Это достигается регулированием с помощью системы импульсно-фазового управления СИФУ по сигналу Uу угла а управления тиристорами, представляющего собой угол задержки открытия тиристоров VS1 и VS2 относительно момента, когда напряжение на их анодах становится положительным. Когда а = 0, т. е. тиристоры VS1 и VS2 получают импульсы управления от СИФУ в указанный момент, преобразователь осуществляет двухполупериодное выпрямление и к якорю двигателя прикладывается полное напряжение. Если теперь с помощью СИФУ осуществлять подачу импульсов управления на тиристоры VS1 и VS2 не в этот момент, а со сдвигом (задержкой) на угол a≠0, то ЭДС преобразователя снизится и этому случаю будет соответствовать уже меньшее среднее напряжение, подводимое к двигателю Регулирование скорости выше основной производится уменьшением тока (потока) возбуждения. При уменьшении магнитного потока Ф согласно (5.5) происходит увеличение скорости холостого хода ω0 и одновременно снижается жесткость механических характеристик двигателя (см.рис.5.5,а).
Рис.5.5. Механические (а) и электромеханические (б) характеристики двигателя постоянного тока независимого возбуждения при уменьшении потока возбуждения и номинальном напряжении якоря Увеличение тока возбуждения выше номинального нецелесообразно, так как вследствие насыщения магнитной цепи машины существенного возрастания магнитного потока не произойдет, а тепловой режим двигателя нарушится. Электромеханические характеристики двигателя при ослаблении поля ω = f(Iя) будут иметь вид, показанный на рис.5.5,6. Эти характеристики, как следует из (5.4), на оси абсцисс сходятся в одной точке, соответствующей току короткого замыкания Iкз = Uя/Rя. Заметим, что масштаб по оси абсцисс на рис.5.5,а и 5.5,6 различен. При анализе механических характеристик при ослаблении поля следует иметь в виду, что при работе с постоянным статическим моментом ток якоря по мере ослабления потока увеличивается. Так, если статический момент на валу двигателя будет равен номинальному, то при номинальном напряжении якоря Uян двигатель будет работать в т.1 (см. рис.5.5,а). Если, например, ослабить поток возбуждения в 2 раза, то скорость холостого хода двигателя аз02 увеличивается в 2 раза. Если момент двигателя сохранится постоянным и равным номинальному, то двигатель будет работать к т 4 Однако, как это следует из (5.3) ток якоря при этом увеличится в 2 раза. Поэтому длительная работа двигателя в т.4 недопустима. Из этого примера следует, что одновременно с повышением скорости необходимо снижать длительно допустимый по условия нагрева (номинальный) момент.
Рис.5.6. Двухзонное регулирование скорости двигателя постоянного тока Линия номинального момента при ослаблении поля отображается кривой 1-2-3. Аналогично при ослаблении поля уменьшается допустимый максимальный момент, определяемый по условиям коммутации на коллекторе. Поскольку при ослаблении поля скорость увеличивается примерно пропорционально степени ослабления поля Фн /Фосл, а длительно допустимый момент Мдоп уменьшается пропорционально отношению Фосл/Фн , то длительно допустимая мощность двигателя Р = Мдопω остается примерно постоянной. Поэтому регулирование ослаблением поля называют регулированием с постоянной мощностью в отличие от регулирования изменением напряжения якоря при постоянном потоке возбуждения, которое называют регулированием с постоянным моментом. Для электроприводов многих механизмов используют комбинированное управление, так называемое двухзонное регулирование скорости. Механические характеристики для этого способа управления показаны на рис.5.6. В первой зоне скорость двигателя в диапазоне от нуля до основной скорости ω0н регулируется изменением напряжения якоря при постоянном потоке возбуждения Фн. Во второй зоне регулирование производится изменением тока (потока) возбуждения при постоянном номинальном напряжении якоря. Соответственно номинальный момент в первой зоне регулирования остается постоянным, а во второй зоне снижается пропорционально уменьшению потока. Максимально допустимая скорость двигателя при ослаблении поля определяется механической прочностью якоря и условиями коммутации на коллекторе. Эта скорость указывается в каталоге на двигатели. Ослабление поля используется и при однозонном регулировании скорости для установления основной (максимальной) скорости. В отличие от синхронных и асинхронных двигатели постоянного тока не имеют жестко определенной номинальной скорости. В каталогах указывается номинальная и максимальная скорости. Например, если указано, что двигатель мощностью 100кВт имеет номинальную скорость 1000об/мин и максимальную – 2000об/мин, то основная скорость может быть установлена в этих пределах выбором соответствующего значения тока возбуждения, например, – 1600об/мин. При этом мощность двигателя останется равной 100кВт. Это удобно при конструировании кинематической схемы рабочей машины. Для высокодинамичных электроприводов небольшой мощности (до 20кВт) эффективно использование высокомоментных двигателей постоянного тока с возбуждением от постоянных магнитов. Благодаря применению высокоэнергетических постоянных магнитов на основе редкоземельных элементов (например, сплава самарий-кобальт), эти двигатели особенно при малых скоростях вращения (когда условия коммутации тока на коллекторе более легкие) способны развивать большой крутящий момент. Отношение пускового момента такого двигателя к номинальному составляет 8-10, в то время как у двигателей с электромагнитным возбуждением это отношение не превышает 2-4. Двигатели находят применение в металлорежущих станках с числовым программным управлением, в приводах роботов и следящих электроприводах различного назначения. В некоторых случаях двигатели независимого возбуждения снабжают «легкой» обмоткой последовательного возбуждения, создающей м.д.с. при номинальном токе якоря около 20% от м.д.с. обмотки независимого возбуждения. Высокодинамичные двигатели смешанного возбуждения применяются в случаях многодвигательного привода, когда два или несколько двигателей работают на один вал или их валы связаны механически (например, лентой конвейера), В этом случае скорость всех двигателей будет одинаковой, но из-за неидентичности характеристик двигателя возникает задача равномерного распределения нагрузки между ними. Благодаря наличию последовательной обмотки возбуждения в более нагруженном двигателе увеличивается поток и возрастает противоэ.д.с. якоря, что ведет к снижению тока якоря. Напротив, менее нагруженный двигатель будет иметь несколько меньший поток, его э.д.с. будет ниже и ток якоря соответственно возрастает. Таким образом, благодаря наличию слабой последовательной обмотки происходит выравнивание тока якоря между двигателями, питающимися от общего источника напряжения.
Рис.5.7. Механические характеристики двигателя постоянного тока в двигательном режиме и режиме рекуперативного торможения Электродвигатели постоянного тока независимого возбуждения могут работать в трех тормозных режимах: режиме рекуперативного торможения, динамического торможения и торможения противовключением. Режим рекуперативного генераторного торможения имеет место, когда скорость двигателя превышает скорость холостого хода ω>ω0 (рис. 5.7). При этом э.д.с. якоря Ея превышает величину напряжения питания якорной цепи
В режиме рекуперативного торможения уравнения (5.1) и (5.5), учитывая, что ток Iя и момент М будут отрицательны, принимают вид:
Основными достоинствами рекуперативного торможения являются: энергетическая эффективность, связанная с полезным использованием энергии торможения; высокая жесткость механических характеристик; плавный переход из двигательного в тормозной режим на одной и той же характеристике. Благодаря такому характеру механических характеристик улучшается качество управления приводом. Вернемся к рассмотрению рис.5.7. Пусть двигатель работал в т. 1 в двигательном режиме со статическим моментом Мс. Если оператор хочет уменьшить скорость, он уменьшает напряжение источника питания с Uя1 до Uя2. Скорость двигателя из-за механической инерции мгновенно не может измениться, и двигатель переходит на работу в т.2. При этом на валу двигателя возникает тормозной момент, равный сумме тормозного момента двигателя и статического момента. Скорость двигателя быстро снижается до скорости ш02 и далее под действием статического момента до скорости, определяемой т.3, где М=М0
Рис.5.8. Схема динамического торможения ДПТ-НВ Вторым возможным тормозным режимом является режим динамического торможения. В этом режиме якорь двигателя отключается от источника Кдт постоянного тока (см. рис.5.8) и замыкается на сопротивление динамического торможения. Питание обмотки возбуждения при этом должно быть обязательно сохранено. В указанном режиме двигатель М работает как генератор постоянного тока, нагруженный на сопротивление Кдт
Рис.5.9. Механические характеристики ДПТ-НВ в режиме динамического торможения Энергия торможения расходуется на нагрев сопротивления Rдти обмоток цепи якоря двигателя. Механические характеристики при динамическом торможении представлены на рис.5.9. Если Rдт=0, якорная цепь двигателя будет замкнута накоротко и механическая характеристика (при Ф = Фн) будет иметь жесткость естественной характеристики. При увеличении Rдт жесткость характеристик будет уменьшаться в соотношении Как следует из (5.5), при Uя=0 уравнение механических характеристик динамического торможения будет:
Недостатками режима динамического торможения являются: потери энергии торможения, расходуемой на нагрев элементов привода, и невозможность торможения привода до полной его остановки. Источник |



































 и механические характеристики будут линейными и расходиться веером из начала координат.
и механические характеристики будут линейными и расходиться веером из начала координат.



