
Контроль и регулирование основных технологических параметров: расхода, уровня, давления и температуры
 Совокупность единичных операций образует конкретные технологические процессы. В общем случае технологический процесс реализуется посредством технологических операций, которые выполняются параллельно, последовательно или комбинированно, когда начало последующей операции сдвинуто по отношению к началу предыдущей.
Совокупность единичных операций образует конкретные технологические процессы. В общем случае технологический процесс реализуется посредством технологических операций, которые выполняются параллельно, последовательно или комбинированно, когда начало последующей операции сдвинуто по отношению к началу предыдущей.
Управление технологическим процессом представляет собой организационно-техническую задачу, и решают ее сегодня, создавая автоматические или автоматизированные системы управления технологическим процессом.
Целью управления технологическим процессом может быть: стабилизация некоторой физической величины, изменение ее по заданной программе или, в более сложных случаях, оптимизация некоторого обобщающего критерия , наибольшая производительность процесса, наименьшая себестоимость продукта и т. д.
К числу типовых технологических параметров, подлежащих контролю и регулированию, относят расход, уровень, давление, температуру и ряд показателей качества.
Замкнутые системы используют текущую информацию о выходных величинах, определяют отклонение ε( t) управляемой величины Y(t) от ее заданного значения Y(o) и принимают действия к уменьшению или полному исключению ε ( t ).
Простейшим примером замкнутой системы, называемой системой регулирования по отклонению, служит показанная на рисунке 1 система стабилизации уровня воды в баке. Система состоит из измерительного преобразователя (датчика) 2 уровня, устройства 1 управления (регулятора) и исполнительного механизма 3, управляющего положением регулирующего органа (клапана) 5.
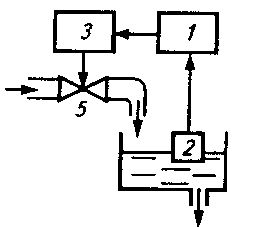
Рис. 1. Функциональная схема автоматической системы управления: 1 — регулятор, 2 — измерительный преобразователь уровня, 3 — исполнительный механизм, 5 — регулирующий орган.
Системы регулирования расхода характеризуются малой инерционностью и частой пульсацией параметра.
Обычно управление расходом — это дросселирование потока вещества с помощью клапана или шибера, изменение напора в трубопроводе за счет изменения частоты вращения привода насоса или степени байпасирования (отведения части потока через дополнительные каналы).
Принципы реализации регуляторов расхода жидких и газообразных сред показаны на рисунке 2, а, сыпучих материалов — на рисунке 2, б.
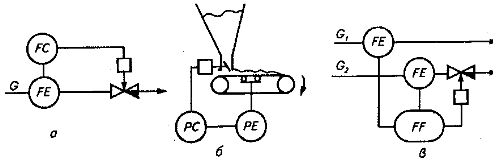
Рис. 2. Схемы регулирования расхода: а — жидких и газообразных сред, б — сыпучих материалов, в — соотношения сред.
В практике автоматизации технологических процессов встречаются случаи, когда требуется стабилизация соотношения расходов двух или более сред.
В схеме, показанной на рисунке 2, в, поток к G1 — ведущий, а поток G2 = γ G — ведомый, где γ — коэффициент соотношения расходов, который устанавливают в процессе статической настройки регулятора.
При изменении ведущего потока G1 регулятор FF пропорционально изменяет ведомый поток G2.
Выбор закона регулирования зависит от требуемого качества стабилизации параметра.
Системы регулирования уровня имеют те же особенности, что и системы регулирования расхода. В общем случае поведение уровня описывается дифференциальным уравнением
D(dl/dt) = G вх — G вых + G обр,
где S — площадь горизонтального сечения емкости, L — уровень, Gвх, G вых — расход среды на входе и выходе, G обр — количество среды, увеличивающейся или уменьшающейся в емкости (может быть равно 0) в единицу времени t .
Постоянство уровня свидетельствует о равенстве количеств подаваемой и расходуемой жидкости. Это условие может быть обеспечено воздействием на подачу (рис. 3, а) или расход (рис. 3, б) жидкости. В варианте регулятора, показанном на рисунке 3, в, используют для стабилизации параметра результаты измерений подачи и расхода жидкости.
Импульс по уровню жидкости — корректирующий, он исключает накопление ошибки вследствие неизбежных погрешностей, возникающих при изменении подачи и расхода. Выбор закона регулирования также зависит от требуемого качества стабилизации параметра. При этом возможно использование не только пропорциональных, но также и позиционных регуляторов.
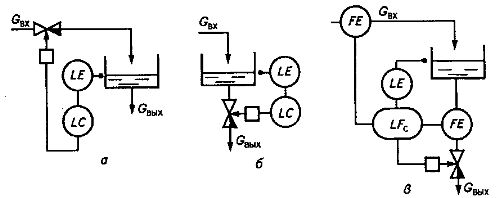
Рис. 3. Схемы систем регулирования уровня: а — с воздействием на подачу, б и в — с воздействием на расход среды.
Постоянство давления, как и постоянство уровня, свидетельствует о материальном балансе объекта. В общем случае изменение давления описывается уравнением:
V(dp/dt) = G вх — G вых + G обр,
где V — объем аппарата, р — давление.
Способы регулирования давления аналогичны способам регулирования уровня.
Температура — показатель термодинамического состояния системы. Динамические характеристики системы регулирования температуры зависят от физико-химических параметров процесса и конструкции аппарата. Особенность такой системы — значительная инерционность объекта и нередко измерительного преобразователя.
Принципы реализации регуляторов температуры аналогичны принципам реализации регуляторов уровня (рис. 2) с учетом управления расходом энергии в объекте. Выбор закона регулирования зависит от инерционности объекта: чем она больше, тем закон регулирования сложнее. Постоянная времени измерительного преобразователя может быть снижена за счет увеличения скорости движения теплоносителя, уменьшения толщины стенок защитного чехла (гильзы) и т. д.
Регулирование параметров состава и качества продукта
При регулировании состава или качества продукта возможна ситуация, когда параметр (например, влажность зерна) измеряют дискретно. В этой ситуации неизбежны потеря информации и снижение точности динамического процесса регулирования.
Рекомендуемая схема регулятора, стабилизирующего некоторый промежуточный параметр Y(t), значение которого зависит от основного регулируемого параметра — показателя качества продукта Y(t i ), показана на рисунке 4.
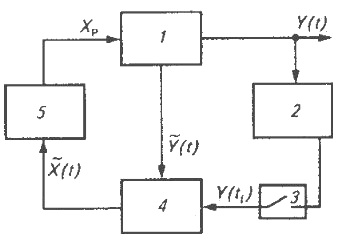
Рис. 4. Схема системы регулирования качества продукта: 1 — объект, 2— анализатор качества, 3 — экстраполяционный фильтр, 4 — вычислительное устройство, 5 — регулятор.
Вычислительное устройство 4, используя математическую модель связи между параметрами Y(t) и Y(t i ), непрерывно оценивает показатель качества. Экстраполяционный фильтр 3 выдает оценочный параметр качества продукта Y(t i ) в промежутках между двумя измерениями.
Если Вам понравилась эта статья, поделитесь ссылкой на неё в социальных сетях. Это сильно поможет развитию нашего сайта!
Подписывайтесь на наш канал в Telegram!
Просто пройдите по ссылке и подключитесь к каналу.
Не пропустите обновления, подпишитесь на наши соцсети:
Источник
Регулирование расхода (Лекция)
1. Особенности регулирования расхода
2. Регулирование устройств для перемещения жидкостей и газов
3. Регулирование соотношения расходов двух веществ
1. Особенности регулирования расхода
При регулировании расхода нужно учитывать некоторые особенности, не присущие обычно системам регулирования других технологических параметров.
Первая особенность – это небольшая (обычно пренебрежимо малая) инерционность объекта регулирования, который представляет собой, как правило, участок трубопровода между первичным измерительным преобразователем для измерения расхода и регулирующим органом. После перемещения штока регулирующего органа в новое положение новое значение расхода устанавливается за доли секунды или, в крайнем случае, за несколько секунд. Это означает, что динамические характеристики системы определяются главным образом инерционностью измерительного устройства, регулятора, исполнительного устройства и линией передачи сигнала (импульсных линий).
Вторая особенность проявляется в том, что сигнал, соответствующий измеренному значению расхода, всегда содержит помехи, уровень которых высок. Частично шум представляет собой физические колебания расхода, частота которых настолько велика, что система не успевает на них реагировать. Наличие высокочастотных составляющих в сигнале изменения расхода – результат пульсаций давления в трубопроводе, которые в свою очередь являются следствием работы насосов, компрессоров, случайных колебаний расхода, например, при дросселировании потока через сужающее устройство. Поэтому при наличии шума, чтобы избежать усиления в системе случайных возмущений, следует применять малые значения коэффициента усиления регулятора.
Рассмотрим объект регулирования расхода – участок трубопровода 1, расположенный между местом измерения расхода (местом установки первичного измерительного преобразователя, например диафрагмы 2) и регулирующим органом 3 (рис. 1). Длина прямого участка трубопровода определяется правилами установки нормальных сужающих устройств и регулирующих органов и может составить несколько метров. Динамику объекта (трубопровода) – канала расход вещества через регулирующий клапан–расход вещества через расходомер – можно представить статическим звеном первого порядка с транспортным запаздыванием. Значение постоянной времени T составляет несколько секунд; время транспортного запаздывания τзап для газа – составляет доли секунды, для жидкости – несколько секунд.

Рис. 1. Фрагмент системы регулирования расхода
Поскольку инерционность объекта при регулировании расхода незначительна, к выбору технических средств управления и методов расчета АСУ предъявляются повышенные требования.
В системах регулирования расхода применяют различные способы изменения расхода:
1. дросселирование потока вещества через регулирующий орган (клапан, заслонка, шибер и др.), установленный на трубопроводе;
2. изменение угловой скорости вращения рабочего вала насоса или вентилятора;
3. байпасирование потока (под байпасированием понимается переброс части вещества из основной магистрали в обводную линию).
2. Регулирование устройств для перемещения жидкостей и газов
Для транспортировки жидкостей по трубопроводам часто применяют центробежные и поршневые насосы, для транспортировки газов – вентиляторы, газодувки, центробежные компрессоры и др. Цель регулирования работы насосов, вентиляторов, компрессоров – поддержать их заданную производительность. Рассмотрим для примера схему регулирования расхода, создаваемого центробежным насосом (рис. .2). Датчик расхода 2 устанавливается после центробежного насоса 1 на линии нагнетания перед регулирующим клапаном 4. При отклонении расхода жидкости от заданного значения регулятор 3 формирует командный сигнал, в соответствии с которым исполнительный механизм перемещает затвор регулирующего клапана 4. Проходное сечение регулирующего клапана изменяется, что приводит к изменению суммарного сопротивления гидравлической линии и, следовательно, расхода жидкости.
Предложенный вариант регулирования расхода жидкости не применим, если для перемещения жидкости используют поршневой насос: по команде регулятора регулирующий клапан может полностью закрыться, что, в конечном итоге, приведет к разрыву трубопровода. Если регулирующий клапан установить на линии всасывания поршневого насоса, то это приводит к помпажу.

2 – датчик расхода;
3 – регулятор расхода;
4 – регулирующий клапан
Рис. 2. Схема регулирования расхода, создаваемого центробежным насосом
Тогда для регулирования расхода используют байпасирование потока (рис. 3): часть жидкости перепускают из нагнетательной линии во всасывающую линию. Таким же способом регулируют производительность шестеренчатых и лопастных насосов.

Рис. 3. Схема регулирования расхода, создаваемого поршневым насосом
Неустойчивая работа насоса, характеризуемая частой сменой режимов работы и гидравлическими ударами, носит название помпаж.
Производительность центробежных компрессоров стабилизируют системами регулирования с регулирующим клапаном, установленным на линии всасывания, и противопомпажной автоматической защитой (рис. 4). Для защиты применяется система сброса части сжатого газа в ресивер, уменьшая при этом расход сжатого газа в линии потребителя. В случае приближения режима работы компрессора к области помпажа, регулятор расхода открывает регулирующий клапан, установленный на линии нагнетания к ресиверу. Это приводит к увеличению производительности компрессора, снижению давления в нагнетательной линии, повышению давления во всасывающей линии, что предотвращает помпаж компрессора.

2 – датчики расхода;
4 – регулирующие клапаны
Рис. 4. Схема регулирования производительности центробежного компрессора с противопомпажной защитой
3. Регулирование соотношения расходов двух веществ
Существует несколько вариантов регулирования соотношения расходов двух веществ.
Первый вариант. Суммарный расход двух веществ не задан, при этом расход одного из веществ F 1 может меняться произвольно. Назовем этот расход «ведущим». Расход второго вещества F 2 назовем «ведомым». Соотношение между расходами второго и первого вещества должно быть постоянным и равным п. Следовательно, «ведомый» расход равен:

1, 2 – датчики расхода;
3 – регулятор соотношения расходов;
4 – регулирующий клапан
Рис. 5. Схема регулирования соотношения расходов при произвольной нагрузке
Второй вариант. Заданы: соотношение расходов двух веществ и ведущий расход F 1. Помимо регулирования соотношения расходов двух веществ применяют дополнительно еще регулирование «ведущего» расхода. При таком регулировании изменение задания по «ведущему» расходу F 1 автоматически изменяет и «ведомый» расход F 1 в заданном соотношении с F 1.

1, 2 – датчики расхода;
3 – регулятор соотношения расходов;
4 – регулятор расхода;
5, 6 – регулирующие клапаны
Рис. 6. Схема регулирования соотношения расходов при заданной нагрузке
Третий вариант. При заданном «ведущем» расходе регулирование соотношения расходов двух веществ проводится с коррекцией по третьему технологическому параметру. Регулирование соотношения расходов двух веществ является внутренним контуром в каскадной системе регулирования третьего технологического параметра, например, уровня в реакторе-смесителе 1. Заданный коэффициент соотношения расходов двух веществ устанавливается внешним регулятором уровня 6 в зависимости от третьего параметра.

2, 3 – датчики расхода;
4– регулятор соотношения расходов;
5– регулятор расхода;
6 – регулятор уровня;
7,8– регулирующие клапаны;
9 – датчик уровня
Рис. 7. Схема регулирования соотношения расходов с коррекцией
по третьему параметру (уровню) при заданной нагрузке
Особенность настройки каскадных САУ заключается в том, что на задание внутреннему регулятору (в данном случае регулятору соотношения расходов двух веществ) устанавливается ограничение:
где n н, n в – нижнее и верхнее соотношения расходов веществ соответственно.
Если выходной сигнал внешнего регулятора (регулятора уровня) выходит за пределы [ n н, n в ] , то задание внутреннему регулятору (в данном случае регулятору соотношения расходов двух веществ) не меняется, а остается на предельно допустимом значении п (а именно или n н или n в).
Требуемое (заданное) качество переходных процессов предопределяет выбор законов управления. Для регулирования расхода без установившейся (статической) погрешности в одноконтурных системах управления применяют ПИ-регуляторы. Если система управления расходом является внутренним контуром двухконтурной каскадной системы управления, то в качестве регулятора расхода может использовать П-регулятор.
В промышленных САР расхода не рекомендуется применять ПД- или ПИД-регуляторы. Если в сигнале изменения расхода присутствуют высокочастотные сигналы (помехи), то использование Д-составляюших в законе регулирования без предварительного сглаживания сигнала расхода может вызвать неустойчивую работу системы управления.
Источник



