
- Основные принципы плавного пуска
- Аннотация
- Текст статьи
- Введение
- Асинхронный двигатель
- Как асинхронный двигатель запускается?
- Пуск асинхронных двигателей
- Электромеханические способы пуска
- Метод A: прямой пуск
- Метод Б: схема пуска «звезда-треугольник»
- Метод C: реостатный способ
- Метод Д: другие электромеханические системы
- Полупроводниковый контроллер
- Запуск асинхронных двигателей
- Способы пуска асинхронного двигателя
Основные принципы плавного пуска
Аннотация
Основные принципы плавного пуска. В данной работе рассмотрены способы пуска асинхронных двигателей и принципы управления фиксированной скоростью ротора.
Текст статьи
С момента своего изобретения (сто лет назад), стандартный 3-фазный асинхронный двигатель стал одним из наиболее известных элементов промышленного оборудования. Благодаря своей простоте конструкции, низкой стоимости, надежности и относительно высокой эффективностью, он, вероятно, останется основным источником механической энергии для промышленных предприятий.
Введение
Преобразование энергии от источника питания к вращающейся механической энергии является основной целью всех двигателей. Для регулирования потока энергии, большинство схем двигателя требует механизм для их подключения и отключения от источников электроэнергии и электромеханические переключатели, известные как контакторы, являются стандартным средством достижения этого элемента управления. Даже сегодня, более чем через сто лет после их введения, контакторные системы остаются наиболее широко используемым методом управления двигателем. Тем не менее, существует определенная тенденция к более сложным электронным системам контроля, применяемых для фиксации частоты вращения двигателя и здесь мы обсудить новейшие формы контроля, а именно – электронные, с микропроцессорным управлением и оптимизацию плавного пуска.
Асинхронный двигатель
Для того чтобы оценить преимущества использования электронного контроллера, важно иметь некоторое представление о характеристиках и ограничениях асинхронных двигателей и электромеханических систем, которые в настоящее время используется для управления ими. Стандартные системы для фиксации скорости асинхронного двигателя должы выполнять два основных требования: возможность ускорения без и с нагрузкой; поддержание полной скорости с нагрузкой. Из-за ограничений материалов и конструкции, эффективно и экономично в одной машине этих целей трудно достичь.
Как асинхронный двигатель запускается?
Как отмечалось ранее, двигатели преобразовывают электроэнергию из электросети в механическую форму, обычно в виде вращающегося вала со скоростью соответствующей частоте питания. Мощность на валу двигателя, равна вращающемуся моменту (момент), умноженному на скорость вала (обороты в минуту). Относительно начального значения в состоянии покоя, крутящий момент изменяется увеличиваясь и уменьшаясь, в зависимости от ускорения, достигая пика примерно в две трети полной скорости, и наконец достигает нуля при синхронной скорости. Приведенная характеристика означает, что асинхронные двигатели всегда работают чуть меньше синхронной скорости для того, чтобы развивать мощность – «проскальзывания» скорость, отсюда и термин асинхронный. Приведенный ниже график (рис. 1), показывает кривую отношения крутящего момента к скорости асинхронного двигателя.

Рисунок 1 – Механическая характеристика асинхронного двигателя
Нагрузка на асинхронном электродвигателе имеет свое отношение скорости на крутящий момент, кривая (рис. 2).

Рисунок 2 – Механическая характеристика асинхронного двигателя (в сочетании с нагрузкой)
Ускорение системы «двигатель – нагрузка» вызвано различием между вращающим моментом (двигатель) и поглощенным вращающим моментом (нагрузка), и показано заштрихованной областью на рисунке 3.

Рисунок 3 – Механическая характеристика асинхронного двигателя (момент ускорения)
Очевидно, что чем больше разница, тем быстрее происходит ускорение и двигатель быстрее достигает номинальной скорости. «Идеальный» пуск ускорил бы ускорение нагрузки с достаточной силой, чтобы достигнуть максимальной скорости гладко и в соответствующее время с минимальным напряжением подводимым к двигателю.
Вообще отношение частоты вращения двигателя к крутящему моменту зависит от сопротивления ротора – двигатель с высоким сопротивлением ротора выдает максимальный крутящий момент (опрокидывающий момент), двигатель с очень низким сопротивлением ротора будет производить низкий пусковой момент, но будет генерировать свой максимальный крутящий момент ближе к синхронной скорости.
Пуск асинхронных двигателей
Пуск размагниченного асинхронного двигателя является важным и сложным процессом. В момент вкючения затрачивается энергия необходимая для намагничивания двигателя, обеспечения ускорения, помимо всего этого имеют место механические и электрические потери. Чрезмерное ускорение ротора при механической нагрузке может производить небольшие колебания крутящего момента на валу и вызывает сильный износ передачи и зубчатых колес.
Электромеханические способы пуска
Метод A: прямой пуск
Самый простой способ управления энергией потока асинхронного двигателя является прекращение его питания с помощью электромагнитного управления, это 3-фазный переключатель, известный как контактор. Этот метод применяется очень широко и является обычной формой управления, где низкая стоимость является первым и наиболее важным фактором. В результате этот способ чаще всего используется на небольших электродвигателях (7,5 – 22 кВт), или там где характеристика достаточно сильна, чтобы противостоять наплыву и стартовым скачкам, не вызывая недопустимое падение напряжения. Данный способ пуска является не рациональным и губительным для оборудования. Его простота и очевидная низкая стоимость, на первый взгляд кажутся привлекательными, но скрывают большие недостатки, которые заключаются в уменьшении срока службы приводов и более высоким риском несостоявшегося пуска, особенно когда необходимы частый пуск и остановка. Недостатки прямого пуска были признаны с тех пор, как двигатели начали использоваться, и были разработаны альтернативные системы, чтобы уменьшить вредные воздействия прямого пуска.
Метод Б: схема пуска «звезда-треугольник»
Пуск переключением «звезда-треугольник» обеспечивает пониженный стартовый крутящий момент, однако с учетом того, что крутящий момент нагрузки пропорционален квадрату скорости. Все пускатели «звезда-треугольник» поставляются со специальными модулями временной задержки, которые создают задержку на контакторе, соединяющем обмотки в «треугольник», необходимой для размыкания контактора, соединяющего обмотки в «звезду». Момент перехода контролируется таймером и, как правило, он составляет 80% от номинальной скорости. Эффект данного способа заключается в изменении напряжения на каждой обмотки статора до 58% от номинального. Это уменьшает пусковой момент до трети с последующим снижением пусковых токов и ускореной силы. Преимущество по сравнению с прямым пуском очевидно, но существенные недостатки все еще остаются.
Переключение со звезды на треугольник на мгновение отключает двигатель от питания. В течение этого времени двигатель находится под механическим влиянием вращающейся нагрузки и, в момент отключения, ток будет протекать в стержнях ротора из-за времени задержки необходимой для затухания магнитного потока. Таким образом, существует остаточный магнитный поток на поверхности вращающегося ротора. Если момент инерции нагрузки мал, например, в насосе или если сила трения высока, могут возникнуть значительные потери скорости в течение времени, когда двигатель отключен.
Это может привести к очень большим пусковым токам (таким же или более высоким как при заторможенном роторе), вместе с массивным переходным колебанием крутящего момента. Хотя описанные эффекты присутствуют только в течении очень короткого периода времени (около одной пятой секунды), они являются источниками сильного износа всей системы привода, особенно там, где необходимы частые пуски.
Метод C: реостатный способ
Уже давно признано, что система «звезда-треугольник» была источником проблем, таких как сварные контакторы, сдвижение приводных валов и т.д., а в течение многих лет был доступен реостатный метод ступенчатого уменьшения скорости. Этот способ применяют при тяжелых условия пуска, т.е. при большой нагрузке на валу. Для реостатного пуска используют асинхронные двигатели с фазным ротором, в цепь ротора включается пусковой реостат. Реостатный пуск служит для увеличения пускового момента. Одновременно происходит уменьшение пускового тока двигателя. По мере разгона двигателя пусковой реостат выводится и после окончания пуска обмотка ротора оказывается замкнутой накоротко.
Метод Д: другие электромеханические системы
Другие методы управления, такие как автотрансформаторы пуска (популярны в Северной Америке), пусковое реактивное сопротивление и т.д., используются в большей или меньшей степени, чтобы компенсировать некоторые неудобства каждого типа обсужденных выше стартеров. Тем не менее, фундаментальные проблемы электромеханических стартеров остаются. Этим проблемы решаются применением полупроводниковых преобразователей.
Полупроводниковый контроллер
В течении 1950-ых много усилий было приложено к разработке устройства транзистора с четырьмя слоями, у которого была возможность переключить большой ток с высоким напряжением. Это устройство стало известно как кремниевый управляемый выпрямитель, а в Европе оно стало известно как тиристор; это основание, на котором построены все устройства плавного пуска. Наибольший интерес представляет способность тиристора переключаться быстро (около 5 миллионных долей секунды) от состояния «выключено» в положение «включено», состояние «включено» длится пока ток через устройство не снизится до нуля и это очень удобно. Управляя тиристором возможно отрегулировать энергию, проходящую через устройство. Открывая тиристор с большей или меньшей задержкой по времени, возможно «вырезать» соответствующую часть синусоиды питающего напряжения. Таким образом, среднее напряжение на выходе устройства будет меняться пропорционально изменению времени задержки открытия тиристора. Поскольку подобный принцип регулирования напряжения предполагает что в те интервалы времени, когда тиристоры остаются закрытыми, ток через обмотки двигателя не протекает, отбора мощности из питающей сети в эти моменты не происходит. Ротор двигателя в эти интервалы времени вращается по инерции.
Запуск асинхронных двигателей
При работе двигателя в предельной нагрузке или вблизи ее, типичный 3-фазный асинхронный двигатель является относительно эффективным, можно увеличить коэффициент полезного действий от 85% к 95%. Однако, как показано ниже (рис. 4), КПД двигателя резко падает, когда нагрузка падает до менее чем 50% от номинальной мощности.

Рисунок 4 – Зависимость КПД от нагрузки
Фактически, очень немного двигателей испытывают полностью номинальный режим работы, подавляющее большинство работают при намного более низкой нагрузке. Для вентиляторов и насосных установок, полупроводниковое управление приводом, оказывает очень значительную экономию энергии по сравнению с практически всеми другими методами контроля, варьируя скорость двигателя в ответ на изменения нагрузки. Менее сложные системы плавного пуска продолжают работать на полной проводимости и двигатель ведет себя так, как будто подключен непосредственно к сети питания. Тем не менее, при малых нагрузках и напряжении питания, в асинхронном двигателе всегда есть избыток магнитного потока, и в результате это приводит к потере эффективности и уменьшению коэффициента мощности. При обнаружении нагрузки в любой момент времени, и изменения напряжения на клеммах двигателя соответственно, можно сэкономить часть энергии возбуждения и нагрузки и повысить коэффициент мощности двигателя, когда двигатель работает неэффективно при небольших нагрузках.
Все устройства плавного пуска управляются микропроцессором и это дает им много преимуществ. Во-первых, нет необходимости корректировок для функции экономии энергии: все вычисления необходимые, чтобы найти лучшую ступень задания фазы отпирания тиристоров при любой нагрузке производится микроконтроллером. Во-вторых, пуск всегда синхронизируется с напряжением питания и тем самым фактически устраняет ток наплыва, связанный с пуском.
Источник
Способы пуска асинхронного двигателя
Общая характеристика вопроса. Прямой пуск.При рассмотрении возможных способов пуска в ход асинхронных двигателей необходимо учитывать следующие основные положения: 1) двигатель должен развивать при пуске достаточно большой пусковой момент, который должен быть больше статического момента сопротивления на валу, чтобы ротор двигателя мог прийти во вращение и достичь номинальной скорости вращения; 2) величина пускового тока должна быть ограничена таким значением, чтобы не происходило повреждения двигателя и нарушения нормального режима работы сети; 3) схема пуска должна быть по возможности простой, а количество и стоимость пусковых устройств — малыми. При пуске асинхронного двигателя на холостом ходу в активном сопротивлении его вторичной цепи выделяется тепловая энергия, равная кинетической энергии приводимых во вращение маховых масс, а при пуске под нагрузкой количество выделяемой энергии соответственно увеличивается. Выделение энергии в первичной цепи обычно несколько больше, чем во вторичной. При частых’ пусках, а также при весьма тяжелых условиях пуска, когда маховые массы приводимых в движение механизмов велики, возникает опасность перегрева обмоток двигателя. Подробно динамика движения электропривода и энергетические соотношения при пуске рассматриваются в курсах электропривода. Число пусков асинхронного двигателя в час, допустимое по условиям его нагрева, тем больше, чем меньше номинальная мощность двигателя и чем меньше соединенные с его валом маховые массы. Двигатели мощностью 3—10 кет в обычных условиях допускают до 5—10 включений вчас. Асинхронные двигатели с короткозамкнутым ротором проще по устройству и обслуживанию, а также дешевле и надежнее в работе, чем двигатели с фазным ротором. Поэтому всюду, где это возможно, применяются двигатели с короткозамкнутым ротором и подавляющее большинство находящихся в эксплуатации асинхронных двигателей являются двигателями с короткозамкнутым ротором. Наиболее простым способом пуска двигателя с короткозамкнутым ротором является включение обмотки его статора непосредственно в сеть, на номинальное напряжение обмотки статора (рис. 28-1, а).Такой пуск называется прямым.
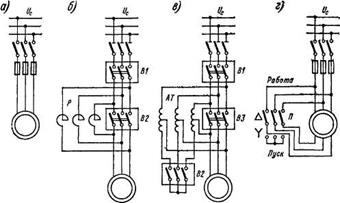
Рис. 28-1.Схемы способов пуска двигателей с короткозамкнутым ротором: а — прямой; б — реакторный; в — автотрансформаторный; г — с переключением со звезды на треугольник
При этом пусковой ток двигателя /„ = (4 ч- 7,0) /н.
Современные асинхронные двигатели с короткозамкнутым ротором проектируются с таким расчетом, чтобы они по величине возникающих при пуске электродинамических усилий, действующих на обмотки, и по условиям нагрева обмоток допускали прямой пуск. Поэтому прямой пуск всегда возможен, когда сеть достаточно мощна и пусковые токи двигателей не вызывают недопустимо больших падений напряжения в сети (не более 10—15%). Современные энергетические системы, сети и сетевые трансформаторные подстанции обычно имеют такие мощности, что в подавляющем большинстве случаев возможен прямой пуск асинхронных двигателей. Нормальным способом пуска двигателей с короткозамкнутым ротором поэтому является прямой пуск. Нередко таким образом осуществляется пуск двигателей мощностью в тысячи киловатт. Если по условиям падения напряжения в сети прямой пуск двигателя с короткозамкнутым ротором невозможен, применяются различные способы пуска двигателя при пониженном напряжении (рис. 28-1, б, в и г). Однако при этом пропорционально квадрату напряжения на зажимах обмотки статора или квадрату пускового тока двигателя понижается также пусковой момент, что является недостатком пуска при пониженном напряжении. Поэтому эти способы пуска применимы, когда возможен пуск двигателя на холостом ходу или под неполной нагрузкой. Необходимость пуска при пониженном напряжении встречается чаще всего у мощных высоковольтных двигателей.
Реакторный пускосуществляется согласно схеме рис. 28-1, б. Сначала включается выключатель В1, и двигатель получает питание через трехфазный реактор (реактивную или индуктивную катушку) Р, сопротивление которого хр ограничивает величину пускового тока. По достижении нормальной скорости вращения включается выключатель В2, который шунтирует реактор, в результате чего на двигатель подается нормальное напряжение сети. Пусковые реакторы строятся обычно с ферромагнитным сердечником (см. § 18-4) и рассчитываются по нагреву только на кратковременную работу, что позволяет снизить их вес и стоимость. Для весьма мощных двигателей применяются также реакторы без ферромагнитного сердечника, с обмотками, укрепленными на бетонном каркасе. Выключатель В1 выбирается на такую отключающую мощность, которая позволяет отключить двигатель при глухом коротком замыкании за выключателем, а выключатель В2 может иметь низкую отключающую мощность. Если составляющие сопротивления короткого замыкания двигателя равны гк и хк, то начальный пусковой ток при прямом пуске, а при реакторном пуске, при пренебрежении активным сопротивлением реактора,

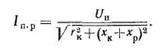
Следовательно, при реакторном пуске начальный пусковой ток уменьшается в раз. Во столько же раз уменьшается также напряжение на зажимах двигателя в начальный момент пуска. Начальный пусковой момент при реакторном пуске Мп.р уменьшается- по сравнению с моментом при прямом пуске Мпп в раз.В приведенных соотношениях не учитывается изменение величины хк при изменении величины пускового тока. При необходимости нетрудно учесть это изменение.
Автотрансформаторный пускосуществляется по схеме рис. 28-1, б в следующем порядке. Сначала включадатся выключатели В1 и В2, и на двигатель через автотрансформатор AT подается пониженное напряжение. После достижения двигателем определенной скорости выключатель В2 отключается, и двигатель получает питание через часть обмотки автотрансформатора AT, который в этом случае работает как реактор. Наконец включается выключатель ВЗ, в результате чего двигатель получает полное напряжение. Выключатель В1 должен быть выбран на отключающую мощность при коротком замыкании, а выключатели В2 и ВЗ могут иметь, меньшие отключающие мощности. Пусковые автотрансформаторы рассчитываются на кратковременную работу. Согласно ГССТ 3211—46, пусковые автотрансформаторы должны иметь ответвления, соответствующие величинам вторичного напряжения, равным 73, 64 и 55% от первичного при прямой схеме включения и 45, 36 и 27% при обратной схеме включения (рис. 28-2). В каждом конкретном случае выбирается подходящая ступень напряжения. Если пусковой автотрансформатор понижает пусковое напряжение двигателя в &ат раз, то пусковой ток в двигателе или на стороне НН автотрансформатора /„ „ уменьшается также в kaT раз, а пусковой ток на стороне ВН автотрансформатора или в сети 1ПС уменьшается в k’aT раз. Пусковой момент Мп, пропорциональный квадрату напряжения на зажимах двигателя, уменьшается также в klT Р аз —



Рис. 28-2. Прямая (а) иобратная (б) схемы включения пусковых автотрансформаторов
Таким образом, при автотрансформаторном пуске Мп и / уменьшаются в одинаковое число раз. В то же время при реакторном пуске пусковой ток двигателей /п д является также пусковым током в сети /п с и пусковой момент М„ уменьшается быстрее пускового тока (в квадратичном отношении). Поэтому при одинаковых величинах /п с при автотрансформаторном пуске пусковой момент будет больше. Однако это преимущество автотрансформаторного пуска достигается ценой значительного усложнения и удорожания пусковой аппаратуры. Поэтому автотрансформаторный пуск применяется реже реакторного, при более тяжелых условиях, когда реакторный пуск не обеспечивает необходимого пускового момента.
Пуск переключением «звезда— треугольник»(рис. 28-1, г) может применяться в случаях, когда выведены все шесть концов обмотки статора и двигатель нормально работает с соединением обмотки статора в треугольник, например, когда двигатель на 380/220 в и с соединением обмоток Y/A работает от сети 220 в. В этом случае при пуске обмотка статора включ’ается в звезду (нижнее положение переключателя П на рис. 28-1, г), а при достижении нормальной скорости вращения переключается в треугольник (верхнее положение переключателя П на рис. 28-1, г). При таком способе пуска по сравнению с прямым пуском при соединении обмотки в треугольник напряжение фаз обмоток уменьшается в У»3 раза, пусковой момент уменьшается в (]/3) а = 3 раза, пусковой ток в фазах обмотки уменьшается в Y% раза, а в сети — в j/З -1/3 =3 раза. Таким образом, рассматриваемый способ пуска равноценен автотрансформаторному пуску при &ат = ]/31.Недостатком этого способа пуска по сравнению с реакторным и автотрансформаторным является то, что при пусковых переключениях цепь двигателя разрывается, что связано с возникновением коммутационных перенапряжений. Этот способ ранее широко применялся при пуске низковольтных двигателей, однако сувеличением мощности сетей потерял свое прежнее значение и в настоящее время используется сравнительно редко.
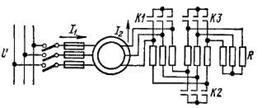
Пуск двигателя с фазным ротором с помощью пускового реостата.Двигатели с фазным ротором применяются значительно реже двигателей с короткозамкнутым ротором. Они используются в следующих случаях: 1) когда двигатели с короткозамкнутым ротором неприемлемы по условиям регулирования их скорости вращения (см. § 28-2); 2) когда статический момент сопротивления на валу при пуске Мст велик и поэтому асинхронный двигатель скоротко-замкнутым ротором с пуском при пониженном напряжении неприемлем, а прямой п^ск такого двигателя недопустим по условиям воздействия больших пусковых токов на сеть; 3) когда прийодимые в движение массы настолько велики, что выделяемая во вторичной цепи двигателя тепловая энергия вызывает недопустимый нагрев обмотки ротора в виде беличьей клетки. Пуск двигателей с фазным ротором производится с помощью пускового реостата в цепи ротора (рис. 28-3). Применяются проволочные, с литыми чугунными элементами, а также жидкостные реостаты. По условиям нагрева реостаты рассчитываются на кратковременную работу. Сопротивления металлических реостатов для охлаждения обычно помещают в бак с трансформаторным маслом. Металлические реостаты являются ступенчатыми, и переключение с одной ступени на другую осуществляется либо вручную с помощью рукоятки контроллера, существенным элементом которого является вал с укрепленными на нем контактами, либо же автоматически (в автоматизированных установках) с помощью контакторов или контроллера с электрическим приводом. Жидкостный реостат с представляет собой сосуд с электролитом (например, водный раствор соды или поваренной соли), в который опущены электроды. Сопротивление реостата регулируется путем изменения глубины погружения электродов.
Рассмотрим пуск двигателя с фазным ротором с помощью ступенчатого металлического реостата (рис. 28-3), управляемого контакторами К- Перед пуском щетки должны быть опущены на контактные кольца ротора, а все ступени реостата включены. Далее в процессе пуска поочередно включаются контакторы КЗ, К2, К1- Характеристики вращающего момента двигателя М = / (s) и вторичного тока /2 = = / (s) при работе на разных ступенях реостата изображены на рис. 28-4, а и б. Предположим, что сопротивления ступеней пускового реостата и интервалы времени переключения ступеней подобраны так, что момент двигателя М при пуске меняется в пределах от некоторого Мма((С до некоторого Ммин и при включении в сеть Мп = Ммакс > Л4СГ (кривая 3 на рис. 28-4, а). В начале пуска двигатель работает по характеристике 3, ротор приходит во вращение, скольжение s начинает уменьшаться, и при s = s3, когда М = ММИн> производится переключение реостата на вторую ступень. При этом двигатель будет работать по характеристике 2, и при дальнейшем разбеге двигателя скольжение уменьшится от s = s3 до s — s2, а момент —- от ‘значения М = Мшкс до М = Ммин. Затем производится переключение на первую ступень и т. д. После
Рис. 28-3. Схема пуска асинхронного двигателя с помощью пускового реостата
выключения последней ступени реостата двигатель переходит на работу по естественной характеристике 0 и достигает установившейся скорости вращения.
При наличии у двигателя короткозамыкающего механизма после окончания пуска щетки с помощью этого механизма поднимаются с контактных колец и кольца замыкаются накоротко, а реостат возвращается в пусковое положение. Тем самым пусковая аппаратура приводится в готовность к следующему пуску. Необходимо отметить, что дистанционное управление короткозамыкающим механизмом контактных колец сложно осуществить; это затрудняет
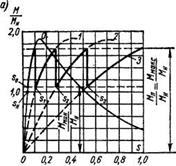

Рис 28-4 Последовательные изменения вращающего момента (а) и тока (б) пра реостатном пуске асинхронного двигателя
автоматическое управление двигателем. Поэтому в последнее время фазные асинхронные двигатели строятся без таких механизмов» При этом щетки постоянно налегают на контактные кольца, что несколько увеличивает потери двигателя и износ щеток. Количество-ступеней пускового реостата с целью упрощения схемы пуска и уде* шевления аппаратуры в автоматизированных установках выбирается небольшим (обычно 2—3 ступени).Пусковые характеристики асинхронного, двигателя при реостат-‘ ном пуске наиболее благоприятны, так как высокие значения моментов достигаются при невысоких значениях пусковых токов. Вопросы расчета пусковых реостатов в данной книге не рассматриваются. Самозапуск асинхронных двигателей, В электрических сетях в результате коротких замыканий случаются кратковременные, длительностью до нескольких секунд, большие понижения напряжения или перерывы питания. Включенные в сеть асинхронные’двигатели при этом начинают затормаживаться и чаще всего полностью останавливаются. При восстановлении напряжения начинается одновременный самозапуск ве отключившихся от сети двигателей. Такой самозапуск двигателей способствует быстрейшему восстановлению нормальной работы производственных механизмов и поэтому целесообразен, а в ряде случаев даже чрезвычайно желателен. Однако одновременный самозапуск большого количества асинхронных двигателей загружает сеть весьма большими токами, что вызывает в ней большие падения напряжения и задерживает процесс восстановления нормального напряжения. Время самозапуска двигателей при этом увеличивается, а в ряде случаев величина пускового мо—мента недостаточна для пуска двигателя. Кроме того, самозапуск некоторых двигателей в подобных условиях недопустим или невозможен (например, двигатели с фазным ротором с пуском с помощью реостата и двигатели скороткозамкнутым ротором с пуском спомощью реакторов и автотрансформаторов, не снабженные специальной автоматической аппаратурой для автоматического самозапуска). Поэтому целесообразно возможность самозапуска использовать только для двигателей наиболее ответственных производственных механизмов, а все остальные двигатели снабдить релейной защитой для их отключения от сети при глубоких падениях напряжения. Самозапуск асинхронных двигателей широко применяется в СССР для двигателей механизмов электрических станций.
Дата добавления: 2015-03-23 ; просмотров: 6294 ; ЗАКАЗАТЬ НАПИСАНИЕ РАБОТЫ
Источник



