
- Основной способ движения агрегатов при двухследной культивации
- Технология предпосевной обработки почвы
- Боронование зяби и посевов
- Агротехнические требования
- Способы движения бороновальных агрегатов
- Контроль качества
- Сплошная культивация почвы
- Агротехнические требования
- Способы движения и подготовка поля
- Контроль качества
- 30. Поверхностная обработка почвы (система машин для зон достаточного и недостаточного увлажнения, способы движения). Методика расчета агрегата для поверхностной обработки почвы.
- Способы движения машинно-тракторных агрегат (Кинематика агрегатов)
Основной способ движения агрегатов при двухследной культивации
Пахота. Желательно направлять агрегат поперек предыдущей пахоты или склона (в целях борьбы с водной эрозией почвы).
Перед началом работы поле должно быть разбито на отдельные загонки С (рис. 61, а), которые следует обрабатывать так, чтобы чередовалась вспашка «всвал» и «вразвал». При этом важно правильно определить размеры загонок, так как при малой их ширине на поле будет большое количество свальных гребней и разъемных борозд, а при большой ширине будет затрачиваться много времени на холостые переезды (повороты) агрегата, что, в свою очередь, снижает выработку.
Рекламные предложения на основе ваших интересов:
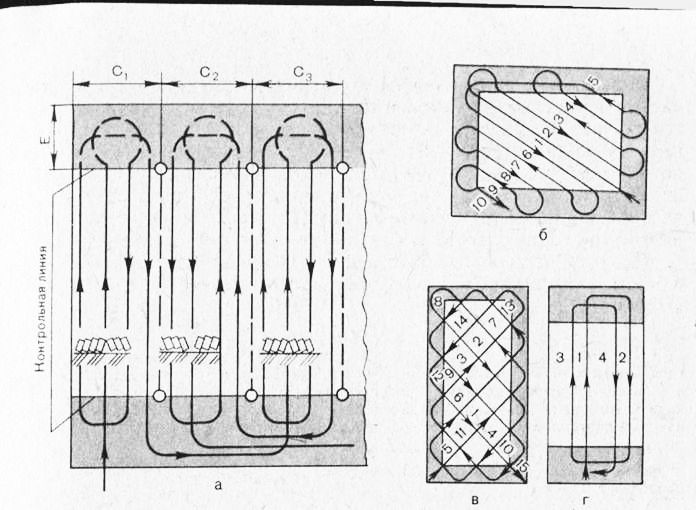
Рис. 61. Способы движения тракторных агрегатов:
а — челночный; б — диагональный; в — диагонально-перекрестный; г — с перекрытием: I… 15 — последовательность движения агрегата; Си Сг и Сз — загонки; Е — поворотная полоса.
В зависимости от длины гона и состава агрегата рекомендуются следующие ширины загонок С.
Сплошная культивация. Первую культивацию проводят поперек направления вспашки или под углом к ней, а повторную — поперек предыдущим культивациям. Предпосевная обработка не должна совпадать с направлением посева. Основной способ движения агрегата челночный (рис. 61, а), кроме того, можно обрабатывать диагонально-перекрестным (рис. 61, в). Широкозахватные агрегаты с прицепными универсальными сцепками следует вести по схеме с «перекрытием» (рис. 61, г).
Боронование. Предпосевное боронование проводят поперек или под углом к предполагаемому направлению посева, а вспаханное поле обрабатывают поперек или под углом к направлению вспашки. Рядковые посевы боронуют поперек к направлению рядков растений, а перекрестные — под острым углом к направлению рядков по диагонали (рис. 61, б). Основной способ движения — челночный. На полях квадратной или прямоугольной формы можно применять диагонально-перекрестный способ, а на полях небольших размеров, если выезд за пределы поля ограничен, — вкруговую.
Посев зерновых колосовых и зернобобовых культур. Направление посева определяют до предпосевной обработки поля. Его следует устанавливать под углом к направлению предполагаемой обработки. Желательно, чтобы длина гона при посеве была наибольшей. На склонах следует сеять поперек направления склона.
Основной способ движения — челночный, возможно применение диагонально-перекрестного. Диагонально-перекрестный и перекрестный посевы следует проводить на полях, площадь которых позволяет завершить посев за 2…3 дня. Диагонально-перекрестный способ посева нужно использовать только на полях квадратной формы.
Посев и посадка пропашных культур. Направление посева или посадки также необходимо определить до выполнения предпосевной обработки поля, направление которой должно быть выбрано под углом или поперек будущего посева или посадки. Квадратно-гнездовой способ нужно вести вдоль склона поля. Пунктирный посев на участках, подверженных действию эрозии почвы, выполняют поперек склона. Основным способом движения считается челночный.
Снегозадержание. Направление валов снега должно быть перпендикулярно направлению господствующих ветров, а также поперек склонов.
Наилучший способ движения — вкруговую по раскручивающейся спирали от центров участков прямоугольной формы, на которые должно быть разбито поле.
Источник
Технология предпосевной обработки почвы
Предпосевная обработка почвы включает в себя боронование, сплошную культивацию, дискование и прикатывание. Рассмотрим технологию только основных операций предпосевной обработки.
Боронование зяби и посевов
Рассмотрим агротехнические требования, способы движения агрегата и контроль качества выполненной работы.
Агротехнические требования
При закрытии влаги почвенная корка должна быть полностью без пропусков разрушена. Перекрытие между смежными проходами — в пределах 0,10…0,15 м. Глубина рыхления почвы—0,04…0,06 м; размеры комков почвы после боронования допускаются: при бороновании зяби —0,04…0,05 м, при разрушении корки и рыхлении посевов— 0,03…0,04 м; высота гребней на пашне — не более 0,03 м, на посевах зерновых — не более 0,02…0,03 м.
При бороновании озимых, пропашных культур и многолетних трав глубина рыхления должна составлять 0,02…0,04 м, а повреждение растений — не более 5%.
Способы движения бороновальных агрегатов
Для начала приведем схему с описанием

а — челночный гоновый; б — диагональный в один след; в — диагональный в два следа (при ширине поля от 0,75 до 0,55 его длины); г — диагональный в два следа (при ширине поля от 0,55 до 0,3 его длины); д — вкруговую от периферии к центру; е — диагонально-угловой; R — радиус поворота; Е — ширина поворотной полосы; е — длина выезда; С — ширина загона; Вр — рабочая ширина захвата агрегата; L — длина гона.
Способы выбирают в зависимости от размеров поля и предшествующей обработки почвы. При длине гона более 500 м применяют челночный способ движения (а), а на полях, имеющих квадратную или прямоугольную форму, применяют диагональный (6) в один след и перекрестно-диагональный в два следа (в, г). На небольших полях агрегаты могут работать вкруговую (д). В этом случае образующиеся на поворотах огрехи обрабатывают угловыми проходами после окончания боронования всего загона.
Озимые и пропашные культуры боронуют челночным способом поперек рядков, а перекрестные посевы — диагональным (б) или перекрестно-диагональным способом (в и г).
Зябь и пары боронуют поперек или под углом к направлению вспашки, а при предпосевном бороновании — поперек или под углом к предполагаемому направлению сева.
Приведем схему разметки поля с описанием

а — квадратной формы при диагонально перекрёстном способе движения; б — прямоугольной формы с соотношением сторон 3 : 1 и более при диагонально-перекрестном способе движения; в — при диагонально-угловом способе движения.
Для работы челночным способом линию первого прохода провешивают от края на расстоянии, равном половине ширины захвата агрегата. При диагонально-перекрестном способе обработки полей квадратной формы линию первого прохода провешивают не по диагонали, а с отклонением влево на 0,7 ширины захвата агрегата (рис. 2, а).
Первый проход выполняют по провешенной линии 1—2, а после разворота — параллельно первому с соответствующим перекрытием. При последующих проходах агрегат в точках 3, 4, 5 и 6 поворачивают на 90° и ведут параллельно линиям 3—4 и 5—6, вторично обрабатывая почву в направлении, перпендикулярном диагонали участка. Разметку поля прямоугольной формы с соотношением сторон 3:1 и более проводят по схеме, показанной на рисунке 2, б. Агрегат ведут сначала по провешенной линии 1— 2—3—4, а после разворота — параллельно первому проходу.
Ширина поворотной полосы для бороновальных агрегатов с навесными зубовыми боронами равна двойной ширине захвата агрегата. В тех случаях, когда можно разворачивать агрегат за пределами поля, поворотные полосы не отбивают.
Контроль качества
Оценочные показатели качества: глубина обработки, выровненность и глыбистость поверхности, отсутствие огрехов. Глубину обработки замеряют линейкой по диагонали участка через 80… 100 м в 10 местах.
Выровненость поверхности определяют замером высоты гребней по диагонали участка через 80… 100 м, а глыбистость — подсчетом комков почвы размером более 0,04 м в рамке площадью 1 м2 по диагонали участка в 10 местах.
Отсутствие огрехов, наволоков от прохода борон и качество обработки поворотных полос определяют визуально.
Сплошная культивация почвы
Также рассмотрим агротехнические требования, способы движения агрегата, подготовку поля и контроль качества работы.
Агротехнические требования
Предпосевную культивацию проводят на глубину заделки семян. Неравномерность глубины обработки —не более ±0,01 м. Культиватор должен полностью подрезать сорную растительность и не выносить нижние слои почвы на поверхность. Дно борозды и поверхность поля должны быть ровными. Высота гребней — не более 0,04 м, перекрытие смежных проходов— 0,1…0,15 м. Огрехи и сгружение почвы не допускаются.
Способы движения и подготовка поля
Первую культивацию проводят поперек направления вспашки или под углом к ней, а повторную —поперек направления предыдущей. Направление предпосевной культивации не должно совпадать с направлением последующего сева.
Наиболее распространенные способы движения — челночный и диагонально-угловой (е). Для широкозахватных агрегатов, а также при работе агрегатов на коротких гонах, когда невозможен выезд за пределы поля, применяют тоновый способ движения машинно-тракторного агрегата с беспетлевым поворотом.
При челночном способе движения линию первого прохода провешивают на расстоянии, равном половине ширины захвата агрегата от края поля. При этом ширина поворотных полос должна быть равна четному числу проходов агрегата при их обработке. В противном случае линию первого прохода провешивают на расстоянии, равном 1,5 ширины захвата.
Необработанную полосу, равную 0,5 ширины захвата агрегата, после первого его прохода культивируют при обработке поворотных полос. При диагонально-угловом способе движения линию первого прохода провешивают согласно схеме (см. рис. 2, в). В этом случае поворотные полосы отбивают со всех четырех сторон.
Контроль качества
Качество работы оценивают по глубине обработки, гребнистости поверхности, степени подрезания сорняков, отсутствию обнажения дна борозды и огрехов.
Глубину обработки проверяют линейкой по диагонали поля в 10 местах; гребнистость поверхности замеряют линейкой по диагонали поля через 50 м; степень подрезания сорняков определяют подсчетом числа неподрезанных на 10 м2 по диагонали поля с пятикратной повторностью.
Вынос нижних слоев почвы, огрехи, наволоки, прямолинейность проходов агрегата, обработку поворотных полос определяют визуальным осмотром.
Источник
30. Поверхностная обработка почвы (система машин для зон достаточного и недостаточного увлажнения, способы движения). Методика расчета агрегата для поверхностной обработки почвы.
Назначение предпосевной обработки почвы — предохранить почву от испарения влаги, уничтожить сорняки, создать слой почвы равномерной и необходимой плотности, обеспечивающий наилучшие условия для одновременного прорастания семян, а также выровнять поверхность поля. Эти задачи выполняют проведением таких операций, как боронование, культивация и прикатывание (до и после посева).
Боронование предназначено для поверхностной обработки почвы боронами.
Разрушить почвенную корку и разрыхлить верхний слой почвы на глубину не менее 3-4 см.
Выровнять поверхность поля и разрушить основную массу почвенных комков до размеров 1-3 см с высотой гребней и борозд не более 3-4 см, не допускать огрехов
Агрегаты для боронования составляют со всеми гусеничными тракторами, которые могут быть направлены на эту работу.
При двухследном бороновании тяжелых почв используют агрегаты из тракторов К-701, К-701М, Т-153, Т-151К, Т-4А, зубовых борон БЗТС-1,0 и сцепок СП-16. Для обработки стерневых агрофонов предназначена борона БИГ-ЗА.
Способ движения бороновальных агрегатов устанавливают в зависимости от длины гона, конфигурации поля, направления предшествующей пахоты.
Выбор способа движения. Направление движения устанавливают с учетом направления движения агрегатов при посеве. Бороновальные агрегаты должны двигаться, как правило, поперек направления движения пахотного агрегата или под углом к нему.
Способы движения агрегатов: челночный, диагонально-угловой (при односледном бороновании) и диагонально-перекрестный (при двухследном бороновании). В отдельных случаях можно применять движение вкруговую. В этом случае огрехи, образующиеся на поворотах, обрабатывают угловыми проходами после окончания работы во всем загоне.
Контроль качества. Качество боронования и прикатывания оценивают по трем основным показателям: глубине рыхления, выровненное поля и комковатостей. При этом учитывают также обработку поворотных полос, огрехи и пропуски, наволоки от прохода борон и др.
Источник
Способы движения машинно-тракторных агрегат (Кинематика агрегатов)

Тема урока: Способы движения машинно-тракторных агрегат (Кинематика агрегатов)
Цель урока: Изучить способы движения, виды поворотов МТА.
Повторение пройденного материала по вопросам.
Объяснение нового материала по вопросам.
1. Машинно-тракторный агрегат в процессе работы перемещается по полю, проходя за смену значительные расстояния, измеряемые часто многими десятками километров. Пройденный агрегатом путь состоит из рабочих ходов и холостых поворотов с выключенными рабочими органами. При этом желательно, чтобы холостой путь агрегата и соответствующие потери времени смены, а также непроизводительный расход топлива были как можно меньше.
Под способом движения МТА подразумевается закономерность его перемещения по полю в процессе работы. Эта закономерность в основном определяется его геометрическими характеристиками: формой траектории; радиусом и видом поворота и т. д.
Подготовка полей в зависимости от выбранного способа движения предусматривает комплекс операций по разбивке поля на загоны требуемой формы и размера, обеспечивающие высокое качество технологического процесса и высокую производительность при возможно меньших затратах ресурсов.
Основной задачей кинематики агрегатов является обоснование методов выбора эффективных способов движения МТА и подготовки полей с учетом следующих основных требований:
— высокое качество выполняемой работы;
— высокая производительность при возможно меньших затратах топлива и других ресурсов на единицу выполненной работы;
— обеспечение безопасных условий работы для механизаторов;
— наименьшее отрицательное воздействие на окружающую среду (почву, культурные растения и т. д.).
Основные кинематические характеристики МТА зависят от конструктивных особенностей трактора, сцепки и рабочих машин. К таким характеристикам агрегата относятся: кинематический центр; кинематическая длина; длина выезда; кинематическая ширина; радиус и центр поворота; ширина колеи и продольная база трактора; ширина захвата.
Под кинематическим центром ц агрегата подразумевается условная геометрическая точка на плоскости движения (поверхности поля), траектория которой рассматривается как траектория МТА в процессе движения по полю. Такое упрощение приемлемо в связи с тем, что геометрические размеры МТА неизмеримо меньше размеров обрабатываемого участка или загона. Расположение центра агрегата ц зависит от типа трактора.

Рис. 1. Основные схемы расположения центра агрегата
Для агрегатов, составляемых на базе колесных тракторов с жесткой рамой, точка ц определяется как проекция середины задней ведущей оси трактора на плоскость движения (рис. 1 а). У агрегатов с тракторами , имеющими шарнирно-сочлененную раму , за центр агрегата принимается проекция на плоскость движения центра шарнира (рис. 1 б ). Для МТА с гусеничными тракторами центр агрегата соответствует проекции на плоскость движения точки пересечения диагоналей, проведенных через наружные края гусениц (рис. 1 в ).
 Кинематической длиной агрегата l к называется проекция расстояния между центром агрегата и линией, перпендикулярной продольной оси трактора и проходящей через наиболее удаленные по ходу МТА точки рабочих органов машин при прямолинейном движении. Как видно из рис. 2 а, кинематическая длина l к агрегата складывается из кинематических длин lт трактора, l с сцепки и l м рабочей машины, т. е.
Кинематической длиной агрегата l к называется проекция расстояния между центром агрегата и линией, перпендикулярной продольной оси трактора и проходящей через наиболее удаленные по ходу МТА точки рабочих органов машин при прямолинейном движении. Как видно из рис. 2 а, кинематическая длина l к агрегата складывается из кинематических длин lт трактора, l с сцепки и l м рабочей машины, т. е.

 Длина выезда агрегата ( е ) определяется как расстояние, на которое перемещается центр агрегата от контрольной линии (границы обрабатываемого участка) по ходу МТА перед началом и в конце поворота. Такое перемещение МТА необходимо для вывода рабочих органов последнего ряда машин на контрольную линию. По значению е пропорциональна кинематической длине агрегата, т. е.
Длина выезда агрегата ( е ) определяется как расстояние, на которое перемещается центр агрегата от контрольной линии (границы обрабатываемого участка) по ходу МТА перед началом и в конце поворота. Такое перемещение МТА необходимо для вывода рабочих органов последнего ряда машин на контрольную линию. По значению е пропорциональна кинематической длине агрегата, т. е.
Значения а е для МТА соответствующих типов приведены в справочной литературе по машиноиспользованию.
Рис.2 — Основные кинематические характеристики агрегата
Кинематическая ширина агрегата d K равна расстоянию между проекциями на плоскость движения продольной оси трактора и параллельной линии, проходящей через наиболее удаленную точку агрегата . Различают d K вправо и влево от продольной оси трактора. Указанные расстояния используют при расчете ширины поворотной полосы загона.
Радиус поворота агрегата R (рис. 2 б ) определяется как расстояние от центра агрегата ц до центра поворота О . Обычно при повороте МТА центр агрегата ц перемещается не по окружности, а по дуге более сложной формы.
Соответственно изменяется как значение радиуса поворота R , так и расположение мгновенного центра поворота О на плоскости движения. При эксплуатационных расчетах принимают среднее значение радиуса поворота R с учетом возможной поправки на скорость МТА.
На рис. 2 а дополнительно показаны такие кинематические показатели агрегата, как ширина колеи k и продольная база Lт трактора, а также ширина захвата МТА. При кинематических расчетах значения рабочей В и конструктивной В к ширины захвата МТА принимают одинаковыми.
 Основные кинематические характеристики рабочего участка:
Основные кинематические характеристики рабочего участка:
— общая L и рабочая Lp длины гона;
— ширина Е поворотной полосы;
Под рабочим участком подразумевается часть поля, отведенная для выполнения определенной сельскохозяйственной операции. Загон представляет собой часть рабочего участка прямоугольной формы, отведенную для работы на ней одного или группы агрегатов.
Рис. 3. Основные кинематические характеристики рабочего участка
 Длина L гона часто определяется размерами поля, а ширина С загона — шириной В захвата и способом движения МТА. Ширина Е поворотной полосы зависит от ширины В захвата и условий безопасного поворота агрегата.
Длина L гона часто определяется размерами поля, а ширина С загона — шириной В захвата и способом движения МТА. Ширина Е поворотной полосы зависит от ширины В захвата и условий безопасного поворота агрегата.
Рабочая длина гона равна:
По соображениям удобства в последующем в качестве расчетной длины гона используется общая длина гона L .
Такое упрощение мало влияет на конечные результаты расчетов. От контрольных линий (рис. 3) в обе стороны на расстоянии длины е выезда агрегата прокладывают линии выключения и включения рабочих органов. Подготовка рабочего участка в полном соответствии с рисунком крайне важна для качественной, высокопроизводительной и экономичной работы машинно-тракторных агрегатов.
2. Виды поворотов.
Петлевые повороты применяются в том случае, если расстояние между смежными проходами агрегата меньше двух радиусов его поворота, т.е.
где Х – расстояние между смежными проходами агрегата;
R 0 – радиус поворота агрегата, м.
Рассмотрим беспетлевые повороты.
Безпетлевые повороты применяются в том случае, если расстояние между смежными проходами агрегата больше либо равно сумме двух радиусов его поворота, т.е.
где Х – расстояние между смежными проходами агрегата;
R 0 – радиус поворота агрегата, м.
Преимущества и недостатки:
1. Наличие петли той или иной формы удлиняет траекторию поворота, а в ряде случаев значительно увеличивает и ширину поворотной полосы (грушевидный, восьмёркообразный, петлевой с открытой петлёй).
2. Отсутствие петли той или иной формы сокращает длину беспетлевого поворота по сравнению с петлевым и значительно уменьшает ширину поворотной полосы (беспетлевой с прямолинейным участком, беспетлевой дугообразный).
3. Петлевые повороты с задним ходом применимы только для движения агрегатов с навесными машинами и хотя для них не требуется широкая поворотная полоса, время поворота t П увеличивается вследствие двух дополнительных остановок трактора для переключения движения с переднего хода движения на задний и наоборот.
Возможность применения того или иного вида поворота зависит от выполняемой операции, условий работы, типа агрегата (ширина захвата, прицепной или навесной, наличие оборотных рабочих органов, реверса и т.д.) и др. факторов.
Главное условие выбора поворота – улучшение качества и технико-эксплуатационных показателей работы агрегата.
3.Классификация способов движения агрегатов по схеме обработки участка. Графическая иллюстрация.
Основными способами движения агрегатов по схеме обработки участка являются следующие:
— с чередованием загонов всвал-вразвал;
Всвал (гоновое правоповоротное движение, при котором загон (участок) обрабатывают от средней части к боковым сторонам (при вспашке в средней части образуется свальный гребень). Применяется в основном на вспашке, уборке картофеля и свёклы.
Вразвал (гоновое левоповоротное движение, при котором загон обрабатывают от боковых сторон к средней части (при вспашке в средней части образуется развальная борозда). Применяется в основном на вспашке, уборке картофеля и свёклы

Беспетлевой комбинированный (движение на одном загоне осуществляется всвал и вразвал). Применяется на вспашке с целью уменьшения ширины поворотных полос, т.к. при этом способе все повороты – беспетлевые.
С чередованием загонов «всвал-вразвал» (нечётные загоны обрабатываются «всвал», т.е. от средней части к боковым сторонам (при вспашке в средней части образуется свальный гребень), а чётные – «вразвал», т.е. от боковых сторон к средней части (при вспашке в средней части образуется развальная борозда). Этот способ позволяет сократить число свальных гребней и развальных борозд по сравнению со способами «всвал» и «вразвал», поскольку на границах загонов направление рабочих ходов совпадает. Применяется в основном на вспашке лемешными плугами.
Перекрытием (движение на загоне осуществляется параллельными ходами с беспетлевыми поворотами). Применяется в основном при посеве на небольших участках с длиной гона до 200 м.
Челночный (загон обрабатывают последовательными, чаще всего рядом расположенными ходами с правыми и левыми поворотами). Это самый распространённый способ движения, не требующий тщательной подготовки поля к работе. Применяется на внесении удобрений, вспашке оборотными плугами, культивации, бороновании, посеве и посадке с.х. культур, уходе за растениями и уборке.
3.Закрепление нового материала по вопросам
4. Домашнее задание .Подведение итогов урока.
Источник



