
- Теоретическая механика: Решебник Яблонского: Плоская система сил (С1, С2, С3, С4, С5)
- Задание С.1. Определение реакций опор твердого тела
- Задание С.2. Определение реакций опор и сил в стержнях плоской фермы
- Задание С.3. Определение реакций опор составной конструкции (система двух тел)
- Задание С.4. Определение реакций опор составной конструкции (система трех тел)
- Задание С.5. Равновесие сил с учетом сцепления (трения покоя)
- Определение реакций опор твердого тела – решение задачи
- Методы определения реакций опор твердого тела
- Самый простой способ составления уравнений равновесия
- Эффективные способы составления уравнений равновесия
- Пример решения задачи на определение реакций опор твердого тела
- Решение задачи
- Схема 1
- Схема 2
- Схема 3
- Определение остальных реакций
Теоретическая механика: Решебник Яблонского:
Плоская система сил (С1, С2, С3, С4, С5)
Бесплатный онлайн решебник Яблонского. Выберите задание и номер варианта для просмотра решения. Смотрите также способы и примеры решения задач по темам плоская система сходящихся сил и произвольная плоская система сил.
Задание С.1. Определение реакций опор твердого тела
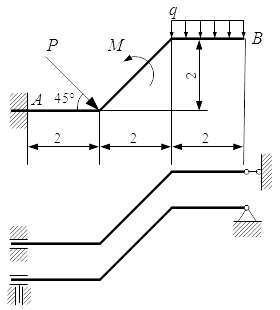
На схемах (рис. 1–4) показаны три способа закрепления бруса, ось которого – ломаная линия. Задаваемая нагрузка (см. табл. 1) и размеры (м) во всех трех случаях одинаковы.
Определить реакции опор для того способа закрепления бруса, при котором реакция, указанная в табл. 1, имеет наименьший модуль.
Варианты с решением: 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 (решено 100%)
Задание С.2. Определение реакций опор и сил в стержнях плоской фермы
Определить реакции опор фермы от заданной нагрузки, а также силы во всех ее стержнях способом вырезания узлов. Схемы ферм показаны на рис. 7–9. Необходимые для расчета данные приведены в табл. 3.
Дополнительно определить в трех стержнях фермы силы от той же нагрузки способом Риттера (номера стержней указаны в табл. 3).
Варианты с решением: 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 (решено 100%)
Задание С.3. Определение реакций опор составной конструкции (система двух тел)
Конструкция состоит из двух частей. Установить, при каком способе соединения частей конструкции модуль реакции, указанной в табл. 5, наименьший, и для этого варианта соединения определить реакции опор, а также соединения С.
На рис. 17–19 показан первый способ соединения – с помощью шарнира С. Второй способ соединения – с помощью скользящей заделки, схемы которой показаны в табл. 6.
Варианты с решением: 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 (решено 100%)
Задание С.4. Определение реакций опор составной конструкции (система трех тел)
Найти реакции опор составной конструкции, состоящей из трех тел, соединенных в точке D. Схемы конструкций представлены на рис. 25–27 (размеры – в м), нагрузка указана в табл. 8. В вариантах 1–15, 21–30 составные части соединены с помощью шарниров, а в вариантах 16–20 – с помощью гладкой втулки малой длины.
Варианты с решением: 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 (решено 100%)
Задание С.5. Равновесие сил с учетом сцепления (трения покоя)
Определить минимальное (в вариантах 1–20, 25, 26, 29, 30) или максимальное (в вариантах 21–24, 27, 28) значение силы P и реакции опор системы, находящейся в покое. Схемы вариантов представлены на рис. 32–34, а необходимые для расчета данные – в табл. 10.
В вариантах 1–20 сцепление (трение покоя) учесть только между тормозной колодкой и барабаном. В вариантах 21–30 учесть сцепление в двух опорных точках тела весом G.
Источник
Определение реакций опор твердого тела – решение задачи
Для определения реакций опор твердого тела, мы заменяем связи в опорах силами реакций и составляем уравнения равновесия, которые можно разбить на две группы.
1) Сумма проекций всех сил, действующих на тело (включая реакции опор), на произвольную ось рана нулю.
2) Сумма моментов всех сил относительно произвольной оси равна нулю.
Далее, для каждой из групп, мы, на свое усмотрение, выбираем оси и составляем уравнения равновесия.
Если полученные уравнения имеют единственное решение, то задача является статически определимой. Она решается методами статики. Если же, при любом выборе осей, мы получаем систему уравнений, в которой число переменных больше числа независимых уравнений, то такая система имеет бесконечно много решений. Выбрать единственное решение, используя только методы статики, нельзя. Задача является статически неопределимой. Такие задачи решаются методами сопротивления материалов.
Далее мы рассмотрим вопросы, связанные с определением реакций опор твердого тела более подробно и разберем пример решения задачи.
Методы определения реакций опор твердого тела
Рассмотрим некоторое твердое тело, на которое действуют заданные внешние силы. Пусть это тело поддерживается, в состоянии равновесия, некоторой системой опор. То есть тело определенным образом закреплено в некоторых точках – опорах. Эти точки закрепления также называются связями.
Далее мы мысленно отбрасываем опоры и прикладываем вместо них силы. Эти силы называются силами реакций опор. Их направления определяются устройствами соответствующих опор. Нам нужно найти такие значения сил реакций, чтобы при их действии на тело, оно находилось в состоянии равновесия, как это происходит в закрепленном состоянии.
Составляем уравнения равновесия. Их можно записать в виде двух векторных уравнений.
1) Векторная сумма всех действующих на тело сил (включая и силы реакций опор) равна нулю:
(1) .
2) Векторная сумма моментов этих сил относительно, произвольным способом, выбранной точки O равна нулю:
(2) .
Второе уравнение можно записать в эквивалентном виде – сумма моментов сил относительно произвольной оси A′A′′ равна нулю:
(2′) .
Самый простой способ составления уравнений равновесия
Разберем самый простой способ составления уравнений равновесия. С его помощью можно гарантированно получить значения сил реакций опор или определить, что схема закрепления тела в опорах является статически неопределимой.
Выберем прямоугольную систему координат с началом в любой точке. Часто за начало системы координат удобно выбрать точку крепления одной из опор, но это не обязательно. Итак, пусть мы выбрали систему координат Oxyz с началом в точке O .
Спроектируем уравнение (1) на оси этой системы. В результате мы получим три уравнения, связывающие проекции сил на оси xyz :
(1.x) ;
(1.y) ;
(1.z) .
Здесь – n сил, действующих на тело. В их состав также включены и силы реакций опор.
Составим уравнения равновесия (2′) для моментов, относительно осей Ox , Oy , Oz системы координат:
(2.x) ;
(2.y) ;
(2.z) .
Заметим, что эти уравнения являются проекциями векторного уравнения (2) на оси Ox , Oy и Oz .
Уравнения (1.x,y,z) и (2.x,y,z) представляют собой полную систему уравнения равновесия для твердого тела. Если мы попытаемся добавить сюда еще одно уравнение, то оно будет являться линейной комбинацией этих уравнений. Например, мы можем выбрать еще одну ось и, относительно нее, составить уравнение для моментов (2′). Или мы можем спроектировать уравнение (1) для сил на другую ось, не совпадающей ни с одной из осей координат. В результате мы получим еще одно уравнение, но оно нам ничего не даст, поскольку оно будет являться линейной комбинацией уже составленных уравнений.
Таким образом, для одного тела, методами статики, мы можем составить максимум шесть независимых уравнений равновесия. В некоторых случаях их число может быть еще меньше. Так, в случае плоской системы сил, у нас будет всего три независимых уравнения.
Неизвестными в этих уравнениях являются проекции реакций опор на оси координат. Если число неизвестных совпадает с числом независимых уравнений, то задача статически определима, и мы можем получить значения неизвестных, решая линейную систему уравнений. Если число неизвестных меньше числа независимых уравнений и система не имеет решений, то, при такой схеме закрепления тела, равновесие не возможно. Если число неизвестных превышает число независимых уравнений, то система уравнений имеет бесконечное множество решений. Выбрать единственное решение, используя только методы статики, нельзя. Задача является статически неопределимой. Такие задачи решаются методами сопротивления материалов. Например, если у стола три ножки, то мы можем определить силы давления ножек на пол методами статики. Если же у стола четыре ножки, то определить эти силы из уравнений статики нельзя.
Эффективные способы составления уравнений равновесия
В некоторых случаях, вычисления реакций опор твердых тел можно упростить. Это можно сделать соответствующим выбором осей координат, относительно которых вычисляются проекции сил в уравнении (1), а также выбором осей, относительно которых вычисляются суммы моментов (2′). Оси в уравнениях (2′) не обязательно должны быть взаимно перпендикулярными. На странице «Определение реакций опор балки» приводится пример, в котором выбраны две параллельные оси, проходящие через разные точки опор балки. Из уравнений (2′), составленных для этих осей, сразу определяются два значения сил реакций.
Ниже приводится пример, в котором требуемая реакция определяется из одного уравнения за счет соответствующего выбора оси.
Пример решения задачи на определение реакций опор твердого тела
Твердое тело представляет собой ломаный брус. Показаны три способа его закрепления. Внешние силы и размеры одинаковы для всех способов закрепления. Определить реакции опор для того способа закрепления, при котором момент MA в опоре A имеет наименьшее абсолютное значение.
Дано:
P = 5 kН ; M = 8 kН·м ; q = 1,2 kН/м .
Решение задачи
Схема 1
Рассмотрим схему 1. Проводим систему координат Axyz с началом в точке A . Ось Az перпендикулярна плоскости рисунка и направлена на нас.
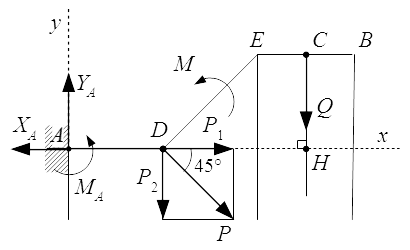
Опора A представляет собой жесткую заделку. Отбросим ее и заменим силами реакций. Силы реакций удобно разложить на три составляющие: на две силы и , параллельные осям координат; и на момент (пару сил) MA .
Заменим равномерно распределенную нагрузку q равнодействующей . Абсолютное значение равнодействующей равно площади эпюры:
kН .
Точка приложения равнодействующей находится в центре тяжести эпюры – в точке C , посередине отрезка EB :
EC = CB = 1 м .
Итак, мы имеем три неизвестные величины: силы XA , YA и момент MA . Нам нужно определить только одну из них – это момент MA . Заметим, что если мы будем определять моменты относительно оси Az , то моменты от сил XA и YA обратятся в нуль, поскольку они пересекают эту ось. Тогда мы получим уравнение, содержащее только одну неизвестную: MA .
Разложим силу на составляющие вдоль осей координат:
.
Абсолютные значения составляющих:
; .
Находим моменты сил относительно оси Az . По правилу правого винта, положительным направлением является направление против часовой стрелки.
Силы , и пересекают ось A . Поэтому их моменты равны нулю:
; ; .
Сила перпендикулярна плечу AD . Ее момент:
.
Проводим прямую через вектор . Из точки A опускаем перпендикуляр AH на эту прямую. Отрезок AH является плечом силы . Он лежит на оси Ax . Момент силы :
.
Составляем уравнение равновесия. Сумма моментов сил, действующих на тело относительно оси Az равна нулю:
;
;
.
Отсюда
кН·м .
Итак, в первом варианте закрепления тела, момент в заделке A равен
кН·м .
Схема 2
Рассмотрим схему 2.
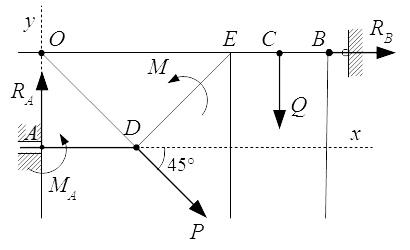
Опора A представляет собой скользящую заделку. Отбросим ее и заменим силами реакций. Силы реакций имеют две составляющие: силу , направленную вдоль оси Ay ; и момент MA .
Опора B представляет собой подвижный цилиндрический шарнир. Его реакцией является сила , направленная горизонтально.
Итак, мы имеем три неизвестные величины: силы RA , RB и момент MA . Нам нужно определить только момент MA . Проведем прямые через векторы и . Пусть O – точка пересечения этих прямых. Через эту точку проведем ось Oz′ , перпендикулярно плоскости рисунка. Мы будем определять моменты относительно оси Oz′ . Поскольку силы и пересекают эту ось, то их моменты равны нулю. Поэтому уравнение для моментов будет содержать только одну неизвестную: MA .
Заметим, что из построения, угол . Тогда вектор пересекает ось Oz′ . Поэтому момент от этой силы равен нулю.
Плечом силы является отрезок OC . Тогда момент равен
.
Составляем уравнение равновесия. Сумма моментов сил, действующих на тело относительно оси Oz′ равна нулю:
;
;
.
Отсюда
кН·м .
Итак, во втором варианте закрепления, момент в заделке A равен
кН·м .
Схема 3
Рассмотрим третий вариант закрепления тела.
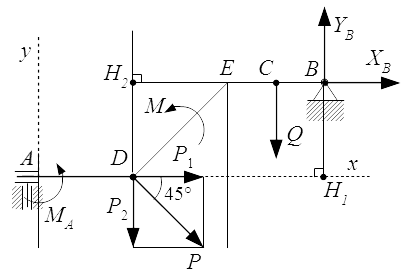
Опора A представляет собой бискользящую заделку. Реакцией здесь является момент (пара сил) MA .
В шарнире B разложим силу реакции на составляющие и вдоль осей координат.
Будем определять моменты относительно оси Bz′′ , проходящую через точку B перпендикулярно плоскости рисунка. Тогда моменты от сил XB и YB обратятся в нуль, поскольку они пересекают эту ось. И мы получим уравнение, содержащее только одну неизвестную MA .
Также, как и в первом случае, разложим силу на составляющие вдоль осей координат:
;
; .
Находим моменты сил относительно оси Bz′′ .
Плечом силы является отрезок CB = 1 м . Поэтому
.
Проведем прямую через вектор . Она совпадает с осью Ax . Из точки B опустим на нее перпендикуляр BH 1 . Тогда BH 1 будет плечом силы . Ее момент:
.
Точно также проводим прямую через вектор и из точки B опускаем на нее перпендикуляр BH 2 . Тогда BH 2 является плечом силы .
.
Составляем уравнение равновесия. Сумма моментов сил, действующих на тело относительно оси Bz′′ равна нулю:
;
;
.
Отсюда
кН·м .
Для третьего варианта,
кН·м .
Определение остальных реакций
Сравнивая найденные значения момента MA для трех способов закрепления тела, находим, что момент имеет наименьшее значение для второй схемы. Для этой схемы определяем значения остальных реакций.
Составляем уравнения равновесия. Сумма проекций сил на ось x равна нулю:
;
;
.
Отсюда
кН .
Знак “минус” указывает на то, что реакция RB направлена в сторону, противоположную той, что указана на рисунке.
Сумма проекций сил на ось y равна нулю:
;
;
.
Отсюда
кН .
Момент MA имеет наименьшее значение для второго способа закрепления тела. Реакции опор, для этого способа закрепления, имеют следующие величины:
кН ; кН ; кН·м .
Использованная литература:
Сборник заданий для курсовых работ по теоретической механике, под редакцией проф. А.А. Яблонского, Москва «Интеграл-пресс», 2006.
Автор: Олег Одинцов . Опубликовано: 30-10-2017
Источник



