
- Натуральная величина треугольника
- Чертежик
- Метки
- Натуральная величина треугольника с описанием.
- Алгоритм определения натуральной величины плоскости:
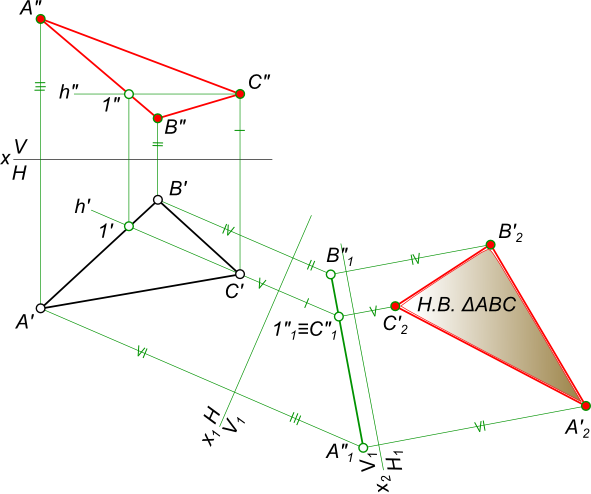
- Замена плоскостей проекции
- Плоскопараллельное перемещение
- Определение натуральной величины треугольника вращением вокруг горизонтали. Построение следов плоскостей
- Страницы работы
- Содержание работы
- Через точки m’, n’ проводят след PV, через точки m, n – след РН.
- Метод вращения вокруг оси
- Способ вращения вокруг проецирующей прямой
- Способ вращения вокруг линии уровня
Натуральная величина треугольника
Натуральная величина треугольника на эпюре Монжа может быть определена: — способом прямоугольного треугольника;
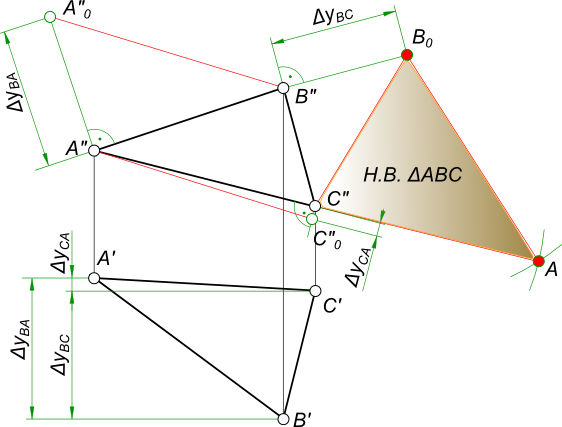
Здесь поочередно применяется способ прямоугольного треугольника для определения действительных величин отрезков, составляющих треугольник, а затем, к одному из них методом засечек строятся два других.
Используем Метод преобразования проекций для определения истиной величины треугольника на эпюре Монжа:
— Способ вращения вокруг осей перпендикулярных плоскостям проекций;
— Вращение вокруг горизонтали представляющих собой линии уровня;
представляющих собой линии уровня;
— Вращение вокруг следа или способ совмещения с плоскостью проекций;
Задача на определение натуральной величины плоской фигуры относится к разделу метрические задачи.
Источник
Чертежик
Метки


Натуральная величина треугольника с описанием.
Натуральная величина треугольника определяется 2 методами:
- замена плоскостей проекции;
- плоскопараллельное перемещение.
Это задание является обязательным для студентов в учебных заведениях и для его решения необходимо изучить тему: » Способы преобразования чертежа».
Для наглядности я использовал определенное задание и на его примере покажу как находится натуральная величина треугольника.
Алгоритм определения натуральной величины плоскости:
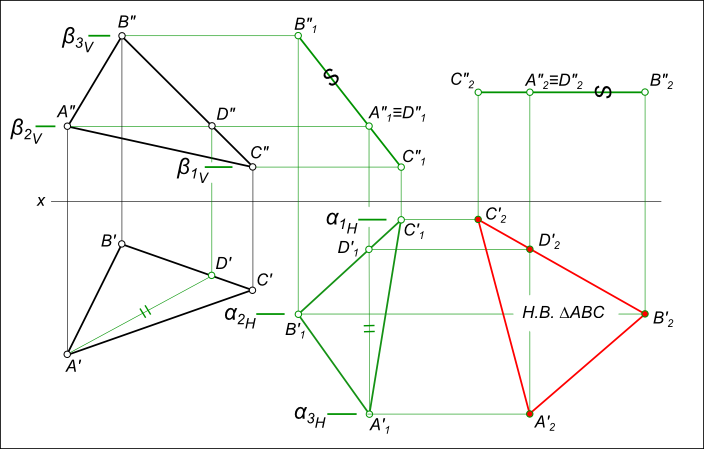
Замена плоскостей проекции
1.) Для построения чертежа использовал задание, расположенное снизу. Первоначально строятся точки по координат в плоскостях П1 и П2.

2.) Строится дополнительная горизонтальная линия 1 1 в верхнем изображении (проводится линия от средне расположенной точки по высоте), затем опускают дополнительные отрезки на нижнее изображение (как указано на рисунке снизу) и соединяют прямой. Эта прямая необходима для того, чтобы на ней расположить вспомогательную плоскость.

3.) Построив прямую на нижнем рисунке, чертится под углом 90 0 ось Х 1 (от точки С1 располагаем на произвольном расстоянии, но не слишком далеко). Затем отмеряются расстояния:
- от С2 до оси Х;
- от В2 до оси Х;
- от А0 до оси Х.
Полученные размеры откладываются от оси Х1 (размеры указаны разными цветами на рисунке снизу) и соединяют, далее подписываются точки.

4.) Строится еще одна дополнительная ось Х2, расположенная параллельно отрезку В 4 С 4 А 4. От точек В4,С4 и А4 проводят прямые перпендикулярные оси Х2.

5.) Отмеряются расстояния:
- от В1 до Х1;
- от С1 до Х1;
- от А1 до Х1.
Полученные результаты измерений откладываются от иси Х2 (на изображении снизу отмечены зелеными и голубым цветами).
 6.) Соединяются точки и подписывают полученную плоскость заглавными «Н.В.»
6.) Соединяются точки и подписывают полученную плоскость заглавными «Н.В.»
Плоскопараллельное перемещение
7.) Откладывается отрезок на оси Х (обозначен синим цветом).

8.) Переносятся точки на текущее построение. 
9.) Соединяют точки, получившиеся при переносе из плоскостей проекций.  10.) Методом вращения точки А2′, С2′ переносятся на горизонтальную прямую, а точка В2′ не меняет свое положение (относительно ее и происходило вращение).
10.) Методом вращения точки А2′, С2′ переносятся на горизонтальную прямую, а точка В2′ не меняет свое положение (относительно ее и происходило вращение). 11.) Откладывается точка (располагают от оси Х на небольшом расстоянии, т.е. произвольном), относительно которой и будет откладываться плоско параллельное перемещение плоскости.
11.) Откладывается точка (располагают от оси Х на небольшом расстоянии, т.е. произвольном), относительно которой и будет откладываться плоско параллельное перемещение плоскости.  12.) От точек А2′, С2′ и В2′ опускаются прямые. Далее циркулем необходимо отмерить расстояния:
12.) От точек А2′, С2′ и В2′ опускаются прямые. Далее циркулем необходимо отмерить расстояния:
Затем эти размеры откладываются от С1′ (обозначены красным и синим цветами).
 13.) Соединяются и подписываются точки (А1′, В1′ и С1′). Опускают прямые от С2″ и А2″
13.) Соединяются и подписываются точки (А1′, В1′ и С1′). Опускают прямые от С2″ и А2″ 14.) От точек С1 и А1 отводят прямые до пересечения с прямыми опущенными от точек С2″ и А2″. В месте пересечения ставится точка.
14.) От точек С1 и А1 отводят прямые до пересечения с прямыми опущенными от точек С2″ и А2″. В месте пересечения ставится точка. 15.) Завершающим шагом является соединение точек и обводка линиями всего чертежа.
15.) Завершающим шагом является соединение точек и обводка линиями всего чертежа. Пример чертежа на тему «Натуральная величина треугольника» смотрите здесь.
Пример чертежа на тему «Натуральная величина треугольника» смотрите здесь.
Источник
Определение натуральной величины треугольника вращением вокруг горизонтали. Построение следов плоскостей
Страницы работы
Содержание работы
Определение натуральной величины треугольника вращением вокруг горизонталь.
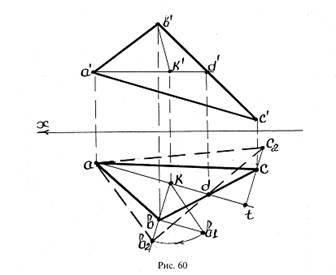
Пример2. Заданы проекции треугольника АВС. Требуется определить натуральную величину фигуры вращением вокруг ее горизонтали (рис.60).
Решение: Проводится горизонталь a’Õ d’ и определяется ее горизонтальная проекция. Прямая АD принимается за ось вращения фигуры.
Определяется центр и радиус вращения точки В. На горизонтальной проекции из точки b опускается перпендикуляр на прямую ad. Точка К – основание перпендикуляра, является центром вращения точки В.
Находится натуральная величина отрезка BK (отрезок b1K, см.рис.60).
Определяется центр вращения точки С. Точка t, основание перпендикуляра, опущенного из точки С на прямую ad, является центром вращения точки С вокруг прямой АD.
Прямая ВК поворачивается вокруг оси AD до положения, когда она будет параллельна плоскости Н.
Очевидно, для определения такого положения достаточно прямую b1k совместить с прямой bk вращением вокруг точки k (прямая b2k , см.рис.60).
При вращении фигуры вокруг оси AD точка С будет перемещаться по прямой, проходящей через точку t и перпендикулярной прямой ad. Следовательно, для определения нового положения точки С достаточно найти точку пересечения прямых b2 d и ct – точка С2.
Точки а, b2 и С2 соединяются прямыми. В результате получают горизонтальную проекцию фигуры а b2 С2 , представляющую натуральную величину треугольника АВС.
Вопрос №3, Вопрос №5, Вопрос №7
Построение следов плоскостей
Существует несколько способов построения следов плоскости, заданной на эпюре проекциями трех точек А, В, С.
I способ. Через точки А и В проводят прямую АВ и определяют следы прямой на плоскостях V и Н (точки m, t, рис. 31). Затем проводят прямую АС и также находят следы на плоскостях проекций (точки n, k, см. рис. 31).
Через точки m’, n’ проводят след PV, через точки m, n – след РН.
II способ. Аналогично предыдущему примеру определяются положения точек m, t.
Через точку С проводится линия, параллельная АВ и находятся следы этой линии на плоскостях проекций (точки n, k, рис. 32). Через точки m’, k’ провидится след PV, через точки t, n – след РН.
III способ. В отличие от предыдущего примера через точку С проводится горизонталь, имеющая общую точку с прямой АВ (точка k, рис. 33). Определяется горизонтальная проекция точки К и проводится линия ck до пересечения с осью ОХ (точка П). В точке пересечения восстанавливается перпендикуляр и определяется точка П’.
Через точки m’, n’ проводится след PV, через точку t – след РН, параллельный линии ck.
Источник
Метод вращения вокруг оси
Одним из наиболее эффективных методов определения метрических характеристик плоских фигур является вращение вокруг оси, в качестве которой обычно используют линию уровня или проецирующую прямую.
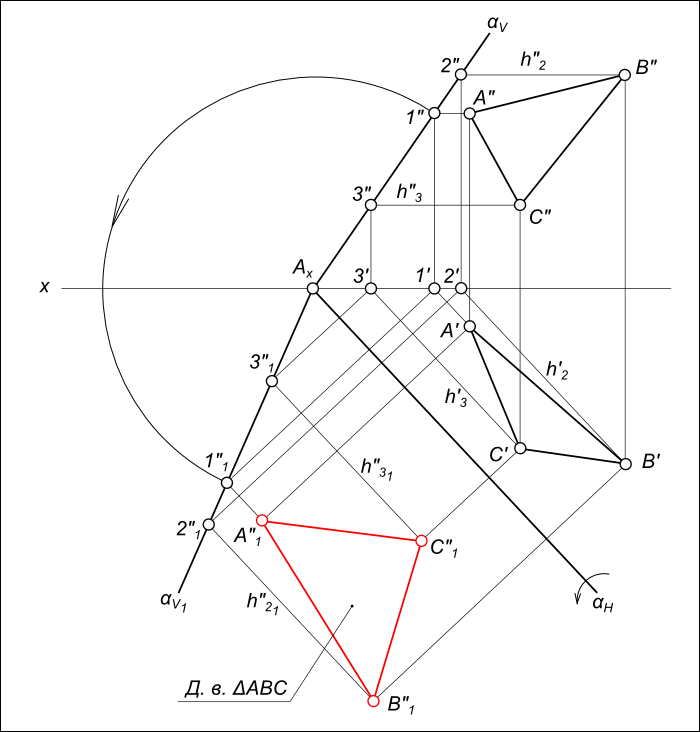
Способ вращения вокруг проецирующей прямой
Перемещение точки при её вращении вокруг проецирующей прямой является частным случаем параллельного перемещения и подчиняется следующим правилам.
- Траектория движения точки – дуга окружности с центром, расположенным на оси вращения. Радиус окружности равен расстоянию между точкой и осью вращения.
- При вращении точки вокруг прямой, перпендикулярной фронтальной плоскости проекции, фронтальная проекция точки перемещается по дуге окружности, а горизонтальная – параллельно оси X.
- При вращении точки вокруг прямой, перпендикулярной горизонтальной плоскости проекции, горизонтальная проекция точки перемещается по дуге окружности, а фронтальная – параллельно оси X.
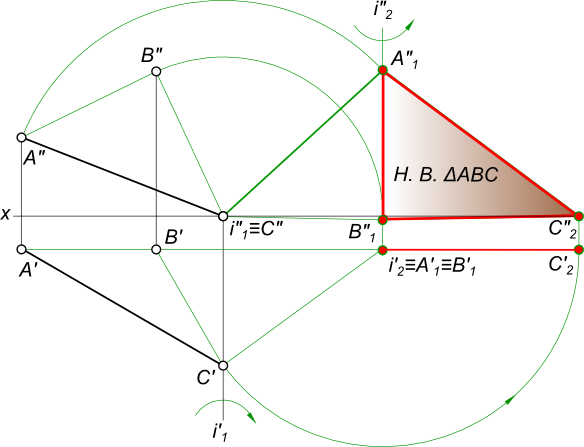
Руководствуясь рассмотренными правилами, повернем отрезок CD в положение, параллельное фронтальной плоскости проекции. В качестве оси вращения i будем использовать горизонтально проецирующую прямую, проведенную через точку D.

При повороте отрезка положение точки D не изменится, поскольку она лежит на оси i. Точку C’ переместим по дуге окружности радиусом C’D’ в положение C’1 так, чтобы выполнялось условие C’1D’1 || X. Для нахождения точки C»1 из C» проведем прямую, параллельную оси X, до пересечения её с линией связи, восстановленной из т. C’1.
На следующем рисунке показан способ перевода отрезка в горизонтально проецирующее положение. Построения выполнены в два этапа и описаны ниже.

Сначала вращением вокруг оси i1 CD перемещают в положение C1D1, параллельное фронтальной плоскости проекции. После этого вращением вокруг оси i2 отрезок переводится в искомое положение C2D2, где он перпендикулярен горизонтальной плоскости проекции.
Расположение осей вращения выбирают исходя из удобства дальнейших построений. В нашей задаче горизонтально проецирующая прямая i1 проходит через точку D, а проекция i»2 фронтально проецирующей прямой i2 лежит на продолжении отрезка C»1D»1.
Способ вращения вокруг линии уровня
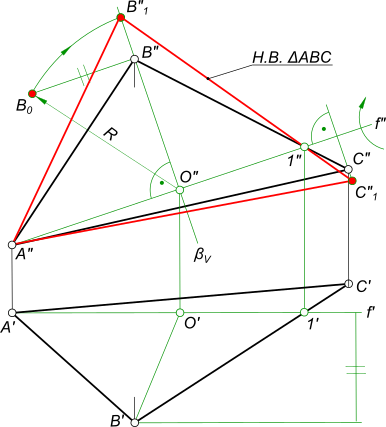
Действенным и наиболее рациональным приемом решения задач, в которых требуется определить натуральную величину угла, является способ вращения вокруг линии уровня.
Основные правила построения
- Радиус вращения точки равен расстоянию между точкой и линией уровня, выполняющей роль оси. Натуральную величину радиуса определяют методом прямоугольного треугольника.
- При вращении вокруг горизонтали h точка перемещается по окружности, которая проецируется на горизонтальную плоскость в отрезок прямой, перпендикулярный горизонтальной проекции горизонтали h’. На фронтальную плоскость окружность, по которой движется точка, проецируется в эллипс. Строить его нет необходимости.
- При вращении вокруг фронтали f точка перемещается по окружности, которая проецируется на фронтальную плоскость в отрезок прямой, перпендикулярный фронтальной проекции фронтали f». Вместе с тем горизонтальная проекция линии перемещения представляет собой эллипс, строить который не обязательно.
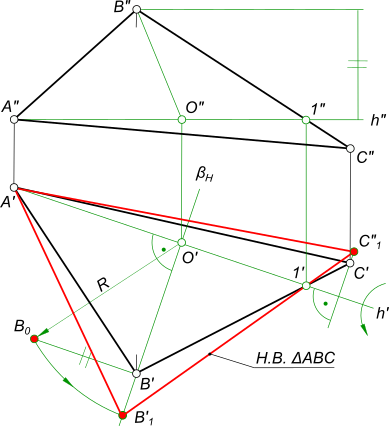
Рассмотрим, как определить действительную величину угла между прямыми a и b, пересекающимися в точке A. Построения представлены на рисунке и выполнены согласно алгоритму, который описан ниже.

- Проводим фронтальную проекцию h» горизонтали h. Она пересекает прямые a» и b» в точках 1» и 2». Определяем горизонтальные проекции 1′ и 2′ и через них проводим h’.
- Находим центр вращения O. Его горизонтальная проекция O’ лежит на пересечении прямой h’ с перпендикуляром, проведенным из A’ к h’.
- Определяем натуральную величину радиуса вращения R = O’A’0. Для этого строим прямоугольный треугольник O’A’A’0, катет которого A’A’0 равен расстоянию от A» до h».
- Проводим дугу окружности радиусом R до пересечения её с прямой O’A’ в точке A’1. Соединяем A’1 с точками 1′ и 2′. Искомый угол ϕ построен.
Источник



