
Б) Метод определения мгновенного центра скоростей
Скорость любой точки тела можно определять с помощью мгновенного центра скоростей. При этом сложное движение представляют в виде цепи вращений вокруг разных центров.
Задача сводится к определению положения мгновенного центра вращений (скоростей) (рис. 12.4).
Рис.12.4. Метод определения мгновенного центра скоростей
Мгновенным центром скоростей (МЦС) является точка на плоскости, абсолютная скорость которой в данный момент равна нулю.
Вокруг этой точки тело совершает поворот со скоростью ω
Скорость точки А в данный момент равна
т.к. vA — линейная скорость точки А, вращающейся вокруг МЦС.
Существуют три способа определения положения мгновенного центра скоростей.
Первый способ.Известна скорость одной точки тела vA иугловая скорость вращения тела ω (рис. 12.5).
Точку О находим на перпендикуляре к вектору скорости vA

Соединяем точку О с точкой Д замеряем расстояние ОБ,


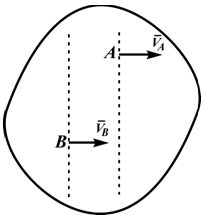
Второй способ.Известны скорости двух точек тела vA и v В и они не параллельны
Проводим из точек А и В два перпендикуляра к известным векторам скоростей.
На пересечении перпендикуляров находим МЦС. Далее можно
найти скорость любой точки С.

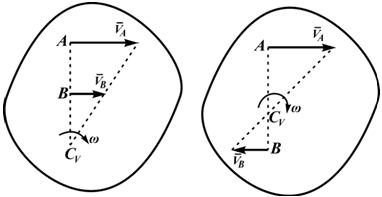
Третий способ.Известны скорости двух точек тела, и они параллельны (vA || v В)

Соединяем концы векторов, МЦС находится на пересечении линии, соединяющей концы векторов с линией АВ (рис. 12.7). При поступательном движении тела (рис. 12.7в) МЦС отсутствует.


Занятие 13. (2 часа) Основные понятия и аксиомы динамики. Понятия о трении.
Содержание и задачи динамики
Динамика — раздел теоретической механики, в котором устанавливается связь между движением тел и действующими на них силами.
В динамике решают два типа задач:
— определяют параметры движения по заданным силам;
— определяют силы, действующие на тело, по заданным кинематическим параметрам движения.
При поступательном движении все точки тела движутся одинаково, поэтому тело можно принять за материальную точку.
Если размеры тела малы по сравнению с траекторией, его тоже можно рассматривать как материальную точку, при этом точка совпадает с центром тяжести тела.
При вращательном движении тела точки могут двигаться неодинаково, в этом случае некоторые положения динамики можно применять только к отдельным точкам, а материальный объект рассматривать как совокупность материальных точек.
Поэтому динамику делят на динамику точки и динамику материальной системы.
Аксиомы динамики
Законы динамики обобщают результаты многочисленных опытов и наблюдений. Законы динамики, которые принято рассматривать как аксиомы, были сформулированы Ньютоном, но первый и четвертый законы были известны Галилею. Механику, основанную на этих законах, называют классической механикой.
Источник
iSopromat.ru

Рассмотрим формулы и примеры определения положения мгновенного центра скоростей (МЦС) для различных твердых тел и механизмов при плоскопараллельном движении.
Теорема Эйлера-Шаля доказывает, что любое непоступательное перемещение фигуры в плоскости можно осуществить поворотом вокруг некоторого неподвижного центра.
В соответствии с этим легко доказывается, что при плоскопараллельном движении в каждый момент времени существует точка, неизменно связанная с плоской фигурой, скорость которой в этот момент равна нулю.
Эту точку называют мгновенным центром скоростей (МЦС). В учебниках эту точку пишут с индексом V, например PV, CV.
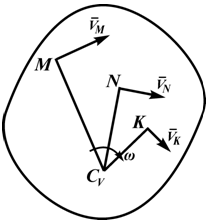
При определении положения МЦС скорость любой точки может быть записана: VM = VCv + VMCv , где точка CV выбрана за полюс. Поскольку это МЦС и VCv=0, то скорость любой точки определяется как скорость при вращении вокруг мгновенного центра скоростей:
Из рисунка 2.16 видно, что МЦС лежит в точке пересечения перпендикуляров, проведённых к скоростям точек, при этом всегда справедливо соотношение:
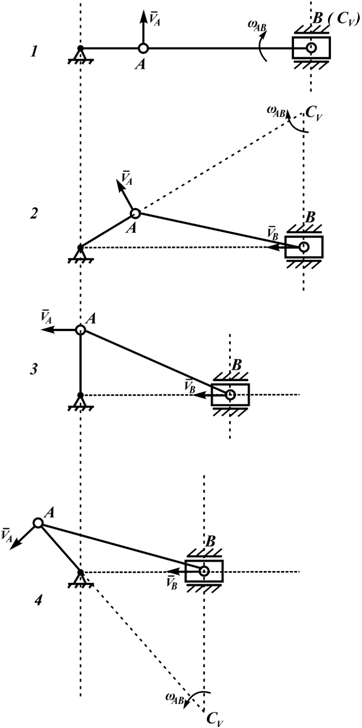
На рисунке 2.17 показаны примеры определения положения МЦС детали кривошипно-шатунного механизма и приведены формулы для расчета скоростей точек.
На рисунках 2.18 — 2.21 приведены примеры определения положения МЦС.
В этом случае МЦС находится в «бесконечности», т.е.
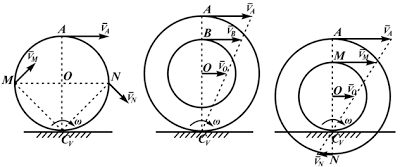
- VA/2R=V0/R=VM/(R√2)=ω,
- VA/2R=V0/R=VB/(R+r)=ω,
- VA/(R+r)=V0/r=VN/(R-r)=ω
Формулы справедливы при отсутствии проскальзывания в точке CV.
Уважаемые студенты!
На нашем сайте можно получить помощь по техническим и другим предметам:
✔ Решение задач и контрольных
✔ Выполнение учебных работ
✔ Помощь на экзаменах
Решение задач, контрольных и РГР
Стоимость мы сообщим в течение 5 минут
на указанный вами адрес электронной почты.
Если стоимость устроит вы сможете оформить заказ.
Набор студента для учёбы
— Рамки A4 для учебных работ
— Миллиметровки разного цвета
— Шрифты чертежные ГОСТ
— Листы в клетку и в линейку
Источник
Мгновенный центр скоростей (МЦС) и его определение. Определение скоростей точек тела с помощью МЦС




![]()
Мгновенным центром скоростей (МЦС) называется такая точка плоской фигуры, скорость которой в данный момент времени равна нулю.
При любом непоступательном движении плоской фигуры такая точка всегда существует. Действительно,

Пусть в данный момент времени известно положение МЦС фигуры. Тогда, принимая его за полюс и учитывая, что  , получим по формуле (4) для произвольной точки фигуры
, получим по формуле (4) для произвольной точки фигуры

т.е. знание МЦС упрощает определение скоростей точек плоской фигуры, т.к. сразу позволяет определить модуль скорости по формуле (5) и направление:  .
.
Таким образом, при известном МЦС вектор скорости любой точки плоской фигуры равен

модуль определяется по формуле

направлен вектор к отрезку РМ, соединяющему МЦС с данной точкой М, в сторону вращения фигуры вокруг МЦС.
В силу вышесказанного, возникает важная задача об определении положения МЦС плоской фигуры.
Положение мгновенного центра скоростей плоской фигуры может быть найдено, если:
1) задан закон движения (1) плоской фигуры (МЦС определяется с помощью дифференциальных равенств);
2) известны направления скоростей двух точек плоской фигуры, или их траектории.
Рассмотрим только случай 2). Пусть известны направления скоростей двух точек А и В фигуры. Тогда для нахождения МЦС надо из этих точек опустить перпендикуляры к направлениям скоростей. В точке пересечения этих перпендикуляров и будет МЦС.
Частные случаи определения МЦС.
а) скорости точек параллельны, но точки не лежат на общем перпендикуляре к скоростям
Ясно, что в этом случае перпендикуляры к скоростям параллельны,  пересекаются в ¥, угловая скорость фигуры = 0 и скорости всех её точек в данный момент равны между собой. Такое движение фигуры называют мгновенно поступательным.
пересекаются в ¥, угловая скорость фигуры = 0 и скорости всех её точек в данный момент равны между собой. Такое движение фигуры называют мгновенно поступательным.
Замечание. Не путать мгновенно поступательное движение с поступательным: при поступательном движении скорости и ускорения всех точек равны между собой в любой момент времени, а при мгновенно поступательном равны только скорости всех точек (но не ускорения – они не равны друг другу!) и только в данный момент.
б) скорости двух точек фигуры параллельны, направлены в одну сторону и их модули не равны друг другу, а точки лежат на одном перпендикуляре к скоростям
В этом случае одних направлений скоростей не достаточно: должны быть известны и их модули.
Для нахождения МЦС надо концы векторов скоростей соединить прямой линией: в точке её пересечения с продолжением отрезка АВ и будет МЦС.
Если известно расстояние АВ, то легко получить

в) то же, что и в предыдущем случае, но векторы скоростей направлены в разные стороны; в этом случае модули скоростей могут быть и равны между собой, но должны быть известны.
Нахождение МЦС также аналогично предыдущему: концы векторов скоростей соединяем прямой линией – в точке её пересечения с отрезком АВ будет МЦС.
Если задано расстояние АВ, то аналогично пункту б) можно найти
г) качение колеса без скольжения по любой гладкой неподвижной поверхности.
Если колесо всё время остаётся в вертикальной плоскости, и отсутствуют повороты вокруг вертикальной оси, то оно совершает плоскопараллельное движение. В этом случае положение МЦС сразу известно: в точке контакта колеса с поверхностью. Действительно, если нет скольжения, то скорость точки контакта равна скорости соответствующей точки поверхности, т.е. нулю (поверхность неподвижна). По определению МЦС – здесь он и находится.

В связи с этим, интересно посмотреть распределение скоростей точек катящегося без скольжения колеса:
скорость верхней точки колеса в два раза больше скорости его центра!
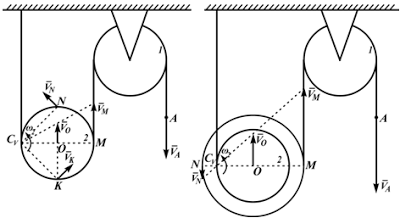
Примеры определения МЦС для шатуна АВ кривошипно-ползунного механизма.
Определение МЦС для шатуна АВ кривошипно-коромыслового механизма:
Рассмотрим пример определения скорости и ускорения точки плоской фигуры.
Прямоугольная пластина со сторонами a = 0,4 м и b = 0,3 м движется в своей плоскости. В данный момент времени скорость точки А пластины равна по модулю vA = 4 м/с, модуль ускорения этой точки равен aA = 3 м/с 2 , модули угловой скорости и углового ускорения фигуры равны соответственно  ,
,  . Направления показаны на рисунке.
. Направления показаны на рисунке.
Определить скорость и ускорение точки B плоской фигуры в этот момент времени.


РЕШЕНИЕ. Принимая за полюс точку А, для определения скорости точки B используем формулу (4):
Вычислив расстояние АВ

по формуле (5) найдём модуль скорости точки В при её вращении вокруг полюса А

Изображаем вектор  (
( ):
):
(стрелка вектора должна быть направлена в сторону вращения фигуры!).
Вектор  скорости полюса переносим параллельно в точку В,
скорости полюса переносим параллельно в точку В,
согласно равенству (4) складываем векторы и .
Для определения модуля скорости находим  :
:

Теперь модуль скорости можно найти двумя способами:
по теореме косинусов (формула (6))
При определении скорости вторым способом выбираем оси координат
и проектируем (4) на эти оси:


Ускорение точки В определяем по формуле (8)

принимая за полюс точку А с известным ускорением.
По формулам (10) и (12) находим модули ускорений
Изображаем векторы этих ускорений:
 .
.
Так как согласно (8) для определения вектора ускорения точки В надо складывать три вектора, то выбираем оси координат
и проектируем (8) на эти оси:
Модуль ускорения будет

Геометрически (на рисунке) вектор ускорения строится при помощи «векторного многоугольника»: от заданной точки в выбранном масштабе последовательно откладываются векторы так, что конец предыдущего вектора является началом следующего; сумма векторов – вектор, идущий из заданной точки в конец последнего вектора.

Зная скорость точки А и угловую скорость фигуры можно найти положение мгновенного центра скоростей. Из равенства (15) следует
Используя доказательство существования МЦС, получаем.
Источник



