
Типы возбуждения и механические характеристики двигателей постоянного тока




![]()
ЛЕКЦИЯ 24
В зависимости от способа подключения обмотки возбуждения ДПТ делятся на двигатели независимого, параллельного, последовательного и смешанного возбуждения. В двигателях независимого возбуждения обмотка возбуждения питается от отдельного источника.
 |
Схемы ДПТ с различными типами возбуждения: а – параллельным; б – последовательным;
в – смешанным
Основными уравнениями двигателя постоянного тока являются:
уравнение электромагнитного момента;
уравнение цепи якоря;
М = Jdω/dt + Мс
Важную роль в анализе двигателей играет механическая характеристика – зависимость частоты вращения nот момента Mна валу при U, Iв = const.
ДПТ с независимым и параллельным возбуждением имеют общее свойство: ток возбуждения не зависит от тока якоря. Пренебрегая реакцией якоря, можно считать, что и поток Ф у них не зависит от нагрузки (момента Мс). Поэтому свойства и характеристики этих ДПТ идентичны, далее будем упоминать только ДПТ с параллельным возбуждением.
Из уравнений противоЭДС и цепи якоря выражаем частоту вращения якоря:
Выразив Iя из формулы электромагнитного момента получаем механическую характеристику ДПТ с параллельным возбуждением:
которая получена из статических уравнений и задает связь между n и M в установившемся режиме (при M = Mс). Механическую характеристику называют естественной, если она получена для двигателей без реостатов в цепях якоря и возбуждения при U = Uном, Ф = Фном. Естественная характеристика является прямой. В режиме холостого хода M = Mс= 0, поэтому первое слагаемое в определяет частоту идеального холостого хода
 .
.
В момент пуска двигателя n = 0 и пусковой момент
 .
.
У двигателей средней и большой мощности сопротивление якорной обмотки Rя мало (десятые и сотые доли Ом), пусковой момент велик, а коэффициент Kн мал. Естественная характеристика имеет малый наклон, поэтому с изменением нагрузки частота n изменяется незначительно. Характеристики такого типа называют «жесткими».
На рис. приведена механическая характеристика n = f(Mс) механизма на валу ДПТ. В установившемся режиме M = Mс, рабочая точка А лежит на пересечении характеристик. Обычно точку номинального режима организуют близко к точке холостого хода: n0 – nном = 3¸7% от n0.
Двигатели с последовательным возбуждением. Для получения механической характеристики полагаем, что в цепях возбуждения и якоря реостаты отсутствуют и Iя = Iв. При слабо насыщенной магнитной цепи можно допустить, что Ф ≈ KIв = KIя, где K = const. Подставив Ф в, получим M = CмKIя 2 ; Iя = . Выразив n и подставив Iя, получим
 Механическая характеристика ДПТ с последовательным воз буждением Механическая характеристика ДПТ с последовательным воз буждением |
Механическая характеристика ДПТ с последовательным возбуждением нелинейна, является «мягкой», что свидетельствует об очень большом пусковом моменте. Из характеристики видно, что запрещается работа (пуск) двигателя без нагрузки (Mс= 0) или с очень малой нагрузкой (Mс
Источник
§5.6. Двигатели постоянного тока. Основные характеристики
Двигатели независимого и параллельного возбуждения.
Схема включения двигателя независимого возбуждения показана на рис. 5.19.
Рис. 5.19.
В цепь якоря может быть включено добавочное сопротивление Rд, например пусковой реостат. Для регулирования тока возбуждения в цепь обмотки возбуждения может быть включен регулировочный реостат Rр. У двигателя параллельного возбуждения обмотки якоря и возбуждения подключены к одному источнику питания, и напряжение на них одинаковое. Следовательно, двигатель параллельного возбуждения можно рассматривать как двигатель независимого возбуждения при Uя= Uв.
Механические характеристики.
Механические характеристики двигателей принято подразделять на естественные и искусственные. Естественная характеристика соответствует номинальному напряжению питания и отсутствию добавочных сопротивлений в цепях обмоток двигателя. Если хотя бы одно из перечисленных условий не выполняется, характеристика называется искусственной.
Уравнения электромеханической ω=f(I я) и механической ω=f(M эм.) характеристик могут быть найдены из уравнения равновесия ЭДС и напряжений для якорной цепи двигателя, записанного на основании второго закона Кирхгофа:
где R я – активное сопротивление якоря.
Преобразуя (5.35) с учетом (5.6), получим уравнение электромеханической характеристики
В соответствии с (5.10) ток якоря I я=M эм./kФ и выражение (5.36) преобразуется в уравнение механической характеристики:
Это уравнение можно представить в виде ω= ω о.ид.— Δ ω, где
ω о.ид — угловая скорость идеального холостого хода ( при Iя=0 и, соответственно, Мэм.=0 ); Δ ω= Мэм. [(Rя+Rд)/(kФ) 2 ]– уменьшение угловой скорости, обусловленное нагрузкой на валу двигателя и пропорциональное сопротивлению якорной цепи.
Семейство механических характеристик при номинальном напряжении на якоре и потоке возбуждения и различных добавочных сопротивлениях в цепи якоря изображено на рис. 5.20,а.
Рис.5.20
Механические характеристики двигателей принято оценивать по трем показателям: устойчивости, жесткости и линейности.
Естественная механическая характеристика, соответствующая (5.37) при Rд=0, изображена прямой линией 1. Механическая характеристика линейная; отклонение от линейного закона может быть вызвано реакцией якоря, приводящей к изменению потока Ф. Эта характеристика жесткая, так как при изменении момента нагрузки и соответственно скорости поток возбуждения не изменяется. Жесткость характеристики уменьшается при введении добавочного сопротивления в цепь якоря (прямые линии 2 и 3 – искусственные реостатные характеристики). Характеристики устойчивые, так как dω/dMэм. Мст. Если это условие выполняется, то при включении двигателя в сеть ротор приходит в движение и разгоняется до установившегося режима. Ввиду того, что ротор обладает моментом инерции, разгоняется он не мгновенно – нарастание скорости происходит по закону, близкому к экспоненте.
Пуск двигателя постоянного тока осложняется тем, что при ω=0 ЭДС Eя=0 и пусковой ток якоря Iяп= Uя/ Rя может в 10 – 20 раз превышать номинальный ток, что опасно как для двигателя (усиление искрения, динамические перегрузки), так и для источника питания. Поэтому важнейшими показателями пускового режима являются кратность пускового тока Kiп= Iп/ Iном и кратность пускового момента Кмп= Мп/ Мном. При пуске необходимо обеспечить требуемую кратность пускового момента при возможно меньшей кратности пускового тока.
Прямой пуск применяют обычно при кратности пускового тока K iп?6. При большем значении Kiп применяют способы пуска, обеспечивающие снижение тока Iяп либо за счет подачи пониженного напряжения на обмотку якоря, либо за счет введения добавочного сопротивления в цепь якоря. Первый способ применяется в основном при работе двигателей в системах автоматического регулирования с якорным способом управления. Второй способ, называемый реостатным, распространен наиболее широко в нерегулируемом приводе. Сопротивление пускового реостата Rп= Rд (см. рис. 5.19) выбирают таким, чтобы ограничить Iяп до (1,4 – 1,8) Iя.ном у двигателей средней мощности и до (2,0 – 2,5) Iя.ном у двигателей малой мощности. По мере разгона якоря ток якоря уменьшается и пусковой реостат постепенно выводится.
Реверсирование.
Реверсирование двигателя осуществляется либо изменением полярности напряжения на обмотке якоря, либо на обмотке возбуждения. В обоих случаях изменяется знак электромагнитного момента двигателя Мэм и соответственно направление вращения ротора.
Торможение.
У двигателей независимого и параллельного возбуждения возможны три тормозных режима: рекуперативное торможение, торможение противовключением и динамическое. При анализе тормозных режимов необходимо строить механические характеристики машины во всех четырех квадрантах плоскости Мэм, ω. Для построения механических характеристик можно пользоваться одним и тем же уравнением (5.37) с учетом знака Мэм в различных режимах работы машины.
Рекуперативное торможение, или генераторное торможение с отдачей энергии в сеть, может быть осуществлено при ω>ω о.ид. В этом случае ЭДС якоря Eя > Uя (см. (5.6) и (5.38)), ток якоря меняет направление, машина переходит в генераторный режим и электромагнитный момент становится тормозным. Механической характеристикой в режиме рекуперативного торможения является продолжение механической характеристики двигателя во II квадранте (ω>0, Mэм 2 . Механические характеристики тормозного режима расположены во II квадранте плоскости Мэм,ω (рис. 5.22, б, Rд2>Rд3).
В момент переключения двигатель переходит из точки А естественной характеристики двигательного режима 1 в точку В характеристики тормозного режима 2, момент Мэм меняет знак и начинается динамическое торможение. Угловая скорость уменьшается, но при этом довольно резко уменьшается и тормозной момент (переход из точки В в С). С целью увеличения тормозного момента производится уменьшение добавочного сопротивления Rд (переход из точки С в точку D). Торможение происходит до нулевой скорости.
Двигатели последовательного и смешанного возбуждения.
У двигателя последовательного возбуждения (рис. 5.23,а) ток якоря протекает по обмотке возбуждения (Iв= Iя) и это определенным образом сказывается на основных характеристиках двигателя. При отсутствии насыщения магнитопровода можно принять, что
где Kф – коэффициент пропорциональности.
С учетом (5.40) уравнения (5.10) и (5.37) принимают вид
где Rв – сопротивление обмотки возбуждения.
Механическая характеристика (рис. 5.23, б пунктирная линия) мягкая, имеет гиперболическую форму и обеспечивает устойчивую работу двигателя. Мягкость характеристики объясняется тем, что с увеличением момента нагрузки и соответственно уменьшением скорости растут ток и поток возбуждения. При больших нагрузках начинает сказываться насыщение магнитопровода и характеристика отличается от расчетной (сплошная линия). Двигатель последовательного возбуждения нельзя пускать без нагрузки на валу, так как при Мэм → 0, угловая скорость ω → ∞.
Квадратичная зависимость момента от тока позволяет при одинаковой кратности пускового тока получать у двигателя последовательного возбуждения больший пусковой момент, чем у двигателя независимого или параллельного возбуждения.
Пуск, реверсирование, торможение и регулирование угловой скорости двигателей последовательного возбуждения осуществляется теми же способами, что и у двигателей независимого и параллельного возбуждения с учетом специфики включения обмоток.
Рис.5.23
Двигатели смешанного возбуждения по своим характеристикам занимают промежуточное положение между двигателями независимого и последовательного возбуждения. Конкретный вид характеристик зависит от того, согласно или встречно(по потоку) включены между собой обмотки возбуждения.
Источник
Схемы электродвигателей постоянного тока и их характеристики
 Свойства электродвигателей постоянного тока определяются в основном способом включения обмотки возбуждения. В зависимости от этого различают электродвигатели:
Свойства электродвигателей постоянного тока определяются в основном способом включения обмотки возбуждения. В зависимости от этого различают электродвигатели:
1. с независимым возбуждением : обмотка возбуждения питается от постороннего источника постоянного тока (возбудителя или выпрямителя) ,
2. с параллельным возбуждением : обмотка возбуждения подключена параллельно обмотке якоря,
3. с последовательным возбуждением : обмотка возбуждения включена последовательно с обмоткой якоря,
4. со смешанным возбуждением : он имеет две обмотки возбуждения, одна подключена параллельно обмотке якоря, а другая — последовательно с ней.
Все эти электродвигатели имеют одинаковое устройство и отличаются лишь выполнением обмотки возбуждения. Обмотки возбуждения указанных электродвигателей выполняют так же, как у соответствующих генераторов .
Электродвигатель постоянного тока с независимым возбуждением
В этом электродвигателе (рис. 1, а) обмотка якоря подключена к основному источнику постоянного тока (сети постоянного тока, генератору или выпрямителю) с напряжением U, а обмотка возбуждения — к вспомогательному источнику в напряжением UB. В цепь обмотки возбуждения включен регулировочный реостат Rрв, а в цепь обмотки якоря — пусковой реостат Rn.
Регулировочный реостат служит для регулирования частоты вращения якоря двигателя, а пусковой — для ограничения тока в обмотке якоря при пуске. Характерной особенностью электродвигателя является то, что его ток возбуждения Iв не зависит от тока Iя в обмотке якоря (тока нагрузки). Поэтому, пренебрегая размагничивающим действием реакции якоря, можно приближенно считать, что и поток двигателя Ф не зависит от нагрузки. Зависимости электромагнитного момента М и частоты вращения n от тока Iя будут линейными (рис. 2, а). Следовательно, линейной будет и механическая характеристика двигателя — зависимость п (М) (рис. 2, б).
При отсутствии в цепи якоря реостата с сопротивлением Rn скоростная и механическая характеристики будут жесткими, т. е. с малым углом наклона к горизонтальной оси, так как падение напряжения IяΣRя в обмотках машины, включенных в цепь якоря, при номинальной нагрузке составляет лишь 3—5 % от Uном. Эти характеристики (прямые 1 на рис. 2, а и б) называются естественными. При включении в цепь якоря реостата с сопротивлением Rn угол наклона этих характеристик возрастает, вследствие чего можно получить семейство реостатных характеристик 2, 3 и 4, соответствующих различным значениям Rn1, Rn2 и Rn3.
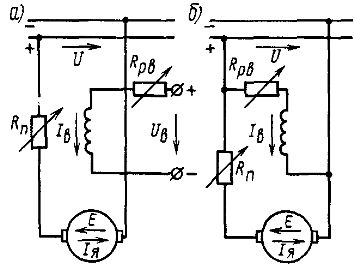
Рис. 1. Принципиальные схемы электродвигателей постоянного тока с независимым (а) и параллельным (б) возбуждением
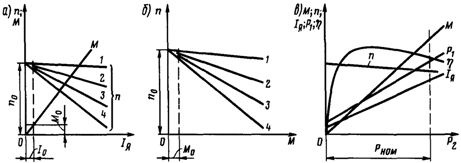
Рис. 2. Характеристики электродвигателей постоянного тока с независимым и параллельным возбуждением : а — скоростные и моментная, б — механические, в — рабочие Чем больше сопротивление Rn, тем больший угол наклона имеет реостатная характеристика, т. е. тем она мягче.
Регулировочный реостат Rpв позволяет изменять ток возбуждения двигателя Iв и его магнитный поток Ф. При этом будет изменяться и частота вращения n.
В цепь обмотки возбуждения никаких выключателей и предохранителей не устанавливают, так как при разрыве этой цепи резко уменьшается магнитный поток электродвигателя (в нем остается лишь поток от остаточного магнетизма) и возникает аварийный режим. Если электродвигатель работает при холостом ходе или небольшой нагрузке на валу, то частота вращения резко возрастает (двигатель идет вразнос). При этом сильно увеличивается ток в обмотке якоря Iя и может возникнуть круговой огонь. Во избежание этого защита должна отключить электродвигатель от источника питания.
Резкое увеличение частоты вращения при обрыве цепи обмотки возбуждения объясняется тем, что в этом случае резко уменьшаются магнитный поток Ф (до значения потока Фост от остаточного магнетизма) и э. д. с. Е и возрастает ток Iя. А так как приложенное напряжение U остается неизменным, то частота вращения n будет увеличиваться до тех пор, пока э. д. с. Е не достигнет значения, приблизительно равного U (что необходимо для равновесного состояния электрической цепи якоря, при котором E= U — IяΣRя.
При нагрузке на валу, близкой к номинальной, электродвигатель в случае разрыва цепи возбуждения остановится, так как электромагнитный момент, который может развить двигатель при значительном уменьшении магнитного потока, уменьшается и станет меньше нагрузочного момента на валу. В этом случае так же резко увеличивается ток Iя, и машина должна быть отключена от источника питания.
Следует отметить, что частота вращения n0 соответствует идеальному холостому ходу, когда двигатель не потребляет из сети электрической энергии и его электромагнитный момент равен нулю. В реальных условиях в режиме холостого хода двигатель потребляет из сети ток холостого хода I0, необходимый для компенсации внутренних потерь мощности, и развивает некоторый момент M0, требуемый для преодоления сил трения в машине. Поэтому в действительности частота вращения при холостом ходе меньше n0.
Зависимость частоты вращения n и электромагнитного момента М от мощности Р2 (рис. 2, в) на валу двигателя, как следует из рассмотренных соотношений, является линейной. Зависимости тока обмотки якоря Iя и мощности Р1 от Р2 также практически линейны. Ток Iя и мощность Р1 при Р2 = 0 представляют собой ток холостого хода I0 и мощность Р0, потребляемую при холостом ходе. Кривая к. п. д. имеет характер, общий для всех электрических машин.
Электродвигатель постоянного тока с параллельным возбуждением
В этом электродвигателе (см. рис. 1, б) обмотки возбуждения и якоря питаются от одного и того же источника электрической энергии с напряжением U. В цепь обмотки возбуждения включен регулировочный реостат Rpв, а в цепь обмотки якоря — пусковой реостат Rп.
В рассматриваемом электродвигателе имеет место, по существу, раздельное питание цепей обмоток якоря и возбуждения, вследствие чего ток возбуждения Iв не зависит от тока обмотки якоря Iв. Поэтому электродвигатель с параллельным возбуждением будет иметь такие же характеристики, как и двигатель с независимым возбуждением. Однако двигатель с параллельным возбуждением работает нормально только при питании от источника постоянного тока с неизменным напряжением.
При питании электродвигателя от источника с изменяющимся напряжением (генератор или управляемый выпрямитель) уменьшение питающего напряжения U вызывает соответствующее уменьшение тока возбуждения Iв и магнитного потока Ф, что приводит к увеличению тока обмотки якоря Iя. Это ограничивает возможность регулирования частоты вращения якоря путем изменения питающего напряжения U. Поэтому электродвигатели, предназначенные для питания от генератора или управляемого выпрямителя, должны иметь независимое возбуждение.
Электродвигатель постоянного тока с последовательным возбуждением
Для ограничения тока при пуске в цепь обмотки якоря включен пусковой реостат Rп (рис. 3, а), а для регулирования частоты вращения параллельно обмотке возбуждения может быть включен регулировочный реостат Rрв.
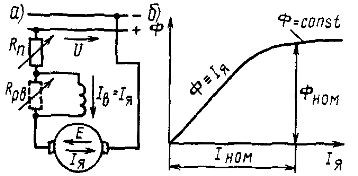
Рис. 3. Принципиальная схема электродвигателя постоянного тока с последовательным возбуждением (а) и зависимость его магнитного потока Ф от тока Iя в обмотке якоря (б)
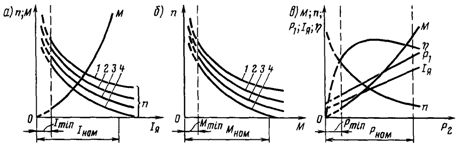
Рис. 4. Характеристики электродвигателя постоянного тока с последовательным возбуждением: а — скоростные и моментная, б — механические, в — рабочие.
Характерной особенностью этого электродвигателя является то, что его ток возбуждения Iв равен или пропорционален (при включении реостата Rpв) току обмотки якоря Iя, поэтому магнитный поток Ф зависит от нагрузки двигателя (рис. 3, б).
При токе обмотки якоря Iя, меньшем (0,8—0,9) номинального тока Iном магнитная система машины не насыщена и можно считать, что магнитный поток Ф изменяется прямо пропорционально току Iя. Поэтому скоростная характеристика электродвигателя будет мягкая — с увеличением тока Iя частота вращения n будет резко уменьшаться (рис. 4, а). Уменьшение частоты вращения n, происходит из-за увеличения падения напряжения IяΣRя. во внутреннем сопротивлении Rя. цепи обмотки якоря, а также из-за увеличения магнитного потока Ф.
Электромагнитный момент М при увеличении тока Iя будет резко возрастать, так как в этом случае увеличивается и магнитный поток Ф, т. е. момент М будет пропорционален току Iя. Поэтому при токе Iя, меньшем (0,8 Н- 0,9) Iном, скоростная характеристика имеет форму гиперболы, а моментная — параболы.
При токах Iя > Iном зависимости М и п от Iя линейны, так как в этом режиме магнитная цепь будет насыщена и магнитный поток Ф при изменении тока Iя меняться не будет.
Механическая характеристика, т. е. зависимость n от М (рис. 4, б), может быть построена на основании зависимостей n и М от Iя. Кроме естественной характеристики 1, можно путем включения в цепь обмотки якоря реостата с сопротивлением Rп получить семейство реостатных характеристик 2, 3 и 4. Эти характеристики соответствуют различным значениям Rn1, Rn2 и Rn3, при этом чем больше Rn, тем ниже располагается характеристика.
Механическая характеристика рассматриваемого двигателя мягкая и имеет гиперболический характер. При малых нагрузках магнитный поток Ф сильно уменьшается, частота вращения n резко возрастает и может превысить максимально допустимое значение (двигатель идет вразнос). Поэтому такие двигатели нельзя применять для привода механизмов, работающих в режиме холостого хода и при небольшой нагрузке (различные станки, транспортеры и пр.).
Обычно минимально допустимая нагрузка для двигателей большой и средней мощности составляет (0,2 …. 0,25) Iном. Чтобы предотвратить возможность работы двигателя без нагрузки, его соединяют с приводным механизмом жестко (зубчатой передачей или глухой муфтой), применение ременной передачи или фрикционной муфты недопустимо.
Несмотря на указанный недостаток, двигатели с последовательным возбуждением широко применяют, особенно там, где имеют место изменения нагрузочного момента в широких пределах и тяжелые условия пуска: во всех тяговых приводах (электровозы, тепловозы, электропоезда, электрокары, электропогрузчики и пр.), а также в приводах грузоподъемных механизмов (краны, лифты и пр.).
Объясняется это тем, что при мягкой характеристике увеличение нагрузочного момента приводит к меньшему возрастанию тока и потребляемой мощности, чем у двигателей с независимым и параллельным возбуждением, поэтому двигатели с последовательным возбуждением лучше переносят перегрузки. Кроме того, эти двигатели имеют большой пусковой момент, чем двигатели с параллельным и независимым возбуждением, так как при увеличении тока обмотки якоря при пуске соответственно увеличивается и магнитный поток.
Если принять, например, что кратковременный пусковой ток может в 2 раза превышать номинальный рабочий ток машины, и пренебречь влиянием насыщения, реакцией якоря и падением напряжения в цепи его обмотки, то в двигателе с последовательным возбуждением пусковой момент будет в 4 раза больше номинального (в 2 раза увеличиваются и ток, и магнитный поток), а в двигателях с независимым и параллельным возбуждением — только в 2 раза больше.
В действительности из-за насыщения магнитной цепи магнитный поток не увеличивается пропорционально току, но все же пусковой момент двигателя с последовательным возбуждением при прочих равных условиях будет значительно больше пускового момента такого же двигателя с независимым или параллельным возбуждением.
Зависимости n и М от мощности Р2 на валу электродвигателя (рис. 4, в), как следует из рассмотренных выше положений, являются нелинейными, зависимости P1, Iя и η от Р2 имеют такую же форму, как и у двигателей с параллельным возбуждением.
Электродвигатель постоянного тока со смешанным возбуждением
В этом электродвигателе (рис. 5, а) магнитный поток Ф создается в результате совместного действия двух обмоток возбуждения — параллельной (или независимой) и последовательной, по которым проходят токи возбуждения Iв1 и Iв2 = Iя

где Фпосл — магнитный поток последовательной обмотки, зависящий от тока Iя, Фпар — магнитный поток параллельной обмотки, который не зависит от нагрузки (определяется током возбуждения Iв1).
Механическая характеристика электродвигателя со смешанным возбуждением (рис. 5, б) располагается между характеристиками двигателей с параллельным (прямая 1) и последовательным (кривая 2) возбуждением. В зависимости от соотношения магнитодвижущих сил параллельной и последовательной обмоток при номинальном режиме можно приблизить характеристики двигателя со смешанным возбуждением к характеристике 1 (кривая 3 при малой м. д. с. последовательной обмотки) или к характеристике 2 (кривая 4 при малой м. д. с. параллельной обмотки).
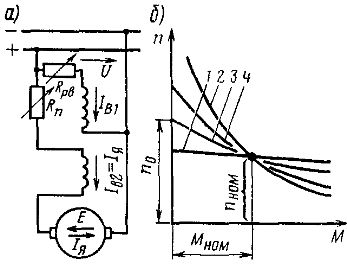
Рис. 5. Принципиальная схема электродвигателя со смешанным возбуждением (а) и его механические характеристики (б)
Достоинством двигателя постоянного тока со смешанным возбуждением является то, что он, обладая мягкой механической характеристикой, может работать при холостом ходе, когда Фпосл=0. В этом режиме частота вращения его якоря определяется магнитным потоком Фпар и имеет ограниченное значение (двигатель не идет вразнос).
Если Вам понравилась эта статья, поделитесь ссылкой на неё в социальных сетях. Это сильно поможет развитию нашего сайта!
Подписывайтесь на наш канал в Telegram!
Просто пройдите по ссылке и подключитесь к каналу.
Не пропустите обновления, подпишитесь на наши соцсети:
Источник



