
Способы возбуждения машин постоянного тока и их классификация
 Ток, протекающий в обмотке возбуждения основных полюсов, создает магнитный поток . Электрические машины постоянного тока следует различать по способу возбуждения и схеме включения обмотки возбуждения.
Ток, протекающий в обмотке возбуждения основных полюсов, создает магнитный поток . Электрические машины постоянного тока следует различать по способу возбуждения и схеме включения обмотки возбуждения.
Генераторы постоянного тока могут выполняться с независимым, параллельным, последовательным и смешанным возбуждением. Следует заметить, что теперь применение в качестве источников энергии генераторов постоянного тока очень ограничено.
Обмотка возбуждения генератора постоянного тока с независимым возбуждением получает питание от независимого источника — сети постоянного тока, специального возбудителя , преобразователя и др. (рис. 1, а). Эти генераторы применяются в мощных системах, когда напряжение возбуждения должно быть выбрано отличным от напряжения генератора, в системах регулирования скорости вращения двигателей, которые питаются от генераторов и других источников.
Значение тока возбуждения мощных генераторов составляет 1,0—1,5% от тока генераторов и до десятков процентов для машин мощностью порядка десятков ватт.
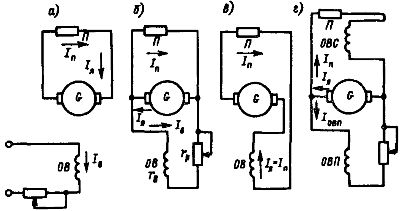
Рис. 1. Схемы генераторов постоянного тока: а — с независимым возбуждением; б — с параллельным возбуждением; в — с последовательным возбуждением; г — со смешанным возбуждением П — потребители
У г енератора с параллельным возбуждением обмотка возбуждения включается на напряжение самого генератора (смотрите рис. 1,б). Ток якоря I я равен сумме токов нагрузки I п и тока возбуждения I в: I я = I п + I в
Генераторы выполняются обычно для средних мощностей.
Обмотка возбуждения генератора с последовательным возбуждением включена последовательно в цепь якоря и обтекается током якоря (рис. 1, в). Процесс самовозбуждения генератора протекает очень бурно. Такие генераторы практически не используются. В самом начале развития энергетики применялась система передачи энергии с последовательно включенными генераторами и двигателями последовательного возбуждения.
Генератор со смешанным возбуждением имеет две обмотки возбуждения — параллельную ОВП и последовательную ОВС обычно с согласным включением (рис. 1, г). Параллельная обмотка может быть включена до последовательной («короткий шунт») или после нее («длинный шунт»). МДС последовательной обмотки обычно невелика и рассчитана только на компенсацию падения напряжения в якоре при нагрузке. Такие генераторы теперь также практически не применяются.
Схемы возбуждения двигателей постоянного тока подобны схемам для генераторов. Двигатели постоянного тока большой мощности выполняются обычно с независимым возбуждением . У двигателей параллельного возбуждения обмотка возбуждения получает питание от того же источника энергии, что и двигатель. Обмотка возбуждения включается непосредственно на напряжение источника энергии, чтобы не сказывалось влияние падения напряжения в пусковом сопротивлении (рис. 2).
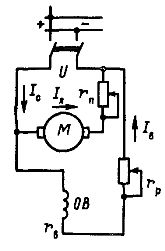
Рис. 2. Схема двигателя постоянного тока с параллельным возбуждением
Ток сети Ic составляется из тока якоря I я и тока возбуждения I в.
Схема двигателя последовательного возбуждения подобна схеме на рис. 1, в. Благодаря последовательной обмотке вращающий момент при нагрузке возрастает больше, чем у двигателей параллельного возбуждения, при этом скорость вращения уменьшается. Это свойство двигателей определяет их широкое применение в приводах электровозной тяги: в магистральных электровозах, городском транспорте и др. Падение напряжения в обмотке возбуждения при номинальном токе составляет единицы процентов от номинального напряжения.
Двигатели смешанного возбуждения из-за наличия последовательной обмотки в некоторой мере имеют свойства двигателей последовательного возбуждения. В настоящее время они практически не применяются. Двигатели параллельного возбуждения иногда выполняются со стабилизирующей (последовательной) обмоткой, включаемой согласно с параллельной обмоткой возбуждения, для обеспечения более спокойной работы при пиках нагрузки. МДС такой стабилизирующей обмотки невелика — единицы процентов от основной МДС.
Если Вам понравилась эта статья, поделитесь ссылкой на неё в социальных сетях. Это сильно поможет развитию нашего сайта!
Подписывайтесь на наш канал в Telegram!
Просто пройдите по ссылке и подключитесь к каналу.
Не пропустите обновления, подпишитесь на наши соцсети:
Источник
§5.6. Двигатели постоянного тока. Основные характеристики
Двигатели независимого и параллельного возбуждения.
Схема включения двигателя независимого возбуждения показана на рис. 5.19.
Рис. 5.19.
В цепь якоря может быть включено добавочное сопротивление Rд, например пусковой реостат. Для регулирования тока возбуждения в цепь обмотки возбуждения может быть включен регулировочный реостат Rр. У двигателя параллельного возбуждения обмотки якоря и возбуждения подключены к одному источнику питания, и напряжение на них одинаковое. Следовательно, двигатель параллельного возбуждения можно рассматривать как двигатель независимого возбуждения при Uя= Uв.
Механические характеристики.
Механические характеристики двигателей принято подразделять на естественные и искусственные. Естественная характеристика соответствует номинальному напряжению питания и отсутствию добавочных сопротивлений в цепях обмоток двигателя. Если хотя бы одно из перечисленных условий не выполняется, характеристика называется искусственной.
Уравнения электромеханической ω=f(I я) и механической ω=f(M эм.) характеристик могут быть найдены из уравнения равновесия ЭДС и напряжений для якорной цепи двигателя, записанного на основании второго закона Кирхгофа:
где R я – активное сопротивление якоря.
Преобразуя (5.35) с учетом (5.6), получим уравнение электромеханической характеристики
В соответствии с (5.10) ток якоря I я=M эм./kФ и выражение (5.36) преобразуется в уравнение механической характеристики:
Это уравнение можно представить в виде ω= ω о.ид.— Δ ω, где
ω о.ид — угловая скорость идеального холостого хода ( при Iя=0 и, соответственно, Мэм.=0 ); Δ ω= Мэм. [(Rя+Rд)/(kФ) 2 ]– уменьшение угловой скорости, обусловленное нагрузкой на валу двигателя и пропорциональное сопротивлению якорной цепи.
Семейство механических характеристик при номинальном напряжении на якоре и потоке возбуждения и различных добавочных сопротивлениях в цепи якоря изображено на рис. 5.20,а.
Рис.5.20
Механические характеристики двигателей принято оценивать по трем показателям: устойчивости, жесткости и линейности.
Естественная механическая характеристика, соответствующая (5.37) при Rд=0, изображена прямой линией 1. Механическая характеристика линейная; отклонение от линейного закона может быть вызвано реакцией якоря, приводящей к изменению потока Ф. Эта характеристика жесткая, так как при изменении момента нагрузки и соответственно скорости поток возбуждения не изменяется. Жесткость характеристики уменьшается при введении добавочного сопротивления в цепь якоря (прямые линии 2 и 3 – искусственные реостатные характеристики). Характеристики устойчивые, так как dω/dMэм. Мст. Если это условие выполняется, то при включении двигателя в сеть ротор приходит в движение и разгоняется до установившегося режима. Ввиду того, что ротор обладает моментом инерции, разгоняется он не мгновенно – нарастание скорости происходит по закону, близкому к экспоненте.
Пуск двигателя постоянного тока осложняется тем, что при ω=0 ЭДС Eя=0 и пусковой ток якоря Iяп= Uя/ Rя может в 10 – 20 раз превышать номинальный ток, что опасно как для двигателя (усиление искрения, динамические перегрузки), так и для источника питания. Поэтому важнейшими показателями пускового режима являются кратность пускового тока Kiп= Iп/ Iном и кратность пускового момента Кмп= Мп/ Мном. При пуске необходимо обеспечить требуемую кратность пускового момента при возможно меньшей кратности пускового тока.
Прямой пуск применяют обычно при кратности пускового тока K iп?6. При большем значении Kiп применяют способы пуска, обеспечивающие снижение тока Iяп либо за счет подачи пониженного напряжения на обмотку якоря, либо за счет введения добавочного сопротивления в цепь якоря. Первый способ применяется в основном при работе двигателей в системах автоматического регулирования с якорным способом управления. Второй способ, называемый реостатным, распространен наиболее широко в нерегулируемом приводе. Сопротивление пускового реостата Rп= Rд (см. рис. 5.19) выбирают таким, чтобы ограничить Iяп до (1,4 – 1,8) Iя.ном у двигателей средней мощности и до (2,0 – 2,5) Iя.ном у двигателей малой мощности. По мере разгона якоря ток якоря уменьшается и пусковой реостат постепенно выводится.
Реверсирование.
Реверсирование двигателя осуществляется либо изменением полярности напряжения на обмотке якоря, либо на обмотке возбуждения. В обоих случаях изменяется знак электромагнитного момента двигателя Мэм и соответственно направление вращения ротора.
Торможение.
У двигателей независимого и параллельного возбуждения возможны три тормозных режима: рекуперативное торможение, торможение противовключением и динамическое. При анализе тормозных режимов необходимо строить механические характеристики машины во всех четырех квадрантах плоскости Мэм, ω. Для построения механических характеристик можно пользоваться одним и тем же уравнением (5.37) с учетом знака Мэм в различных режимах работы машины.
Рекуперативное торможение, или генераторное торможение с отдачей энергии в сеть, может быть осуществлено при ω>ω о.ид. В этом случае ЭДС якоря Eя > Uя (см. (5.6) и (5.38)), ток якоря меняет направление, машина переходит в генераторный режим и электромагнитный момент становится тормозным. Механической характеристикой в режиме рекуперативного торможения является продолжение механической характеристики двигателя во II квадранте (ω>0, Mэм 2 . Механические характеристики тормозного режима расположены во II квадранте плоскости Мэм,ω (рис. 5.22, б, Rд2>Rд3).
В момент переключения двигатель переходит из точки А естественной характеристики двигательного режима 1 в точку В характеристики тормозного режима 2, момент Мэм меняет знак и начинается динамическое торможение. Угловая скорость уменьшается, но при этом довольно резко уменьшается и тормозной момент (переход из точки В в С). С целью увеличения тормозного момента производится уменьшение добавочного сопротивления Rд (переход из точки С в точку D). Торможение происходит до нулевой скорости.
Двигатели последовательного и смешанного возбуждения.
У двигателя последовательного возбуждения (рис. 5.23,а) ток якоря протекает по обмотке возбуждения (Iв= Iя) и это определенным образом сказывается на основных характеристиках двигателя. При отсутствии насыщения магнитопровода можно принять, что
где Kф – коэффициент пропорциональности.
С учетом (5.40) уравнения (5.10) и (5.37) принимают вид
где Rв – сопротивление обмотки возбуждения.
Механическая характеристика (рис. 5.23, б пунктирная линия) мягкая, имеет гиперболическую форму и обеспечивает устойчивую работу двигателя. Мягкость характеристики объясняется тем, что с увеличением момента нагрузки и соответственно уменьшением скорости растут ток и поток возбуждения. При больших нагрузках начинает сказываться насыщение магнитопровода и характеристика отличается от расчетной (сплошная линия). Двигатель последовательного возбуждения нельзя пускать без нагрузки на валу, так как при Мэм → 0, угловая скорость ω → ∞.
Квадратичная зависимость момента от тока позволяет при одинаковой кратности пускового тока получать у двигателя последовательного возбуждения больший пусковой момент, чем у двигателя независимого или параллельного возбуждения.
Пуск, реверсирование, торможение и регулирование угловой скорости двигателей последовательного возбуждения осуществляется теми же способами, что и у двигателей независимого и параллельного возбуждения с учетом специфики включения обмоток.
Рис.5.23
Двигатели смешанного возбуждения по своим характеристикам занимают промежуточное положение между двигателями независимого и последовательного возбуждения. Конкретный вид характеристик зависит от того, согласно или встречно(по потоку) включены между собой обмотки возбуждения.
Источник
Электромеханические и механические характеристики двигателей постоянного тока с независимым и параллельным возбуждением

Вид электромеханической и механической характеристик двигателей постоянного тока зависит от способа возбуждения, поэтому рассмотрим сначала характеристики двигателей с независимым возбуждением.
Схема двигателя постоянного тока с независимым возбуждением.
Напряжение, подводимое к двигателю должно быть достаточным, чтобы создать ЭДС якоря Eа и покрыть потери на активное сопротивление якорной цепи.
Электромеханической характеристикой двигателя постоянного тока называется зависимость скорости вращения от тока якоря.
Если подать напряжение на обмотку якоря при отсутствии тока на обмотке возбуждения, то магнитный поток будет равен нулю, а скорость будет стремиться к бесконечности. Такое явление называется разносом двигателя. Чтобы избежать разноса двигателя используются электродвигатели с параллельным возбуждением – двигатели, у которых обмотка возбуждения соединяется внутри машины параллельно обмотке якоря.
Схема двигателя постоянного тока с параллельным возбуждением.
Уравнение механической характеристики двигателя постоянного тока с параллельным и независимым возбуждением:
Как видно из формул, зависимость между скоростью и током якоря носит линейный характер, следовательно, электромеханическая характеристика будет представлять собой прямую линию.
Рассмотрим характерные точки электромеханической характеристики:
Электромеханическая характеристика двигателя постоянного тока с параллельным возбуждением.
1. ω = 0; Iа = Iп = U / rа
Точка 1 – пусковая точка. С нее начинается разгон двигателя.
Пусковой ток Iп = (8÷10) Iн
4. ω > ω0; Iа Iп
Если под действием производственного механизма изменится направление вращения электрического двигателя, то двигатель перейдет в режим торможения противовключением, который называется силовой спуск.
Если мы поменяем полярность, то будет реверс.
Механическая характеристика имеет такой же вид, как и электромеханическая, но в другом масштабе.
Источник



