
Счисление пути
Способ определения координат местоположения ЛА, основанный на вычислении пройденного пути относительно известного начального положения ЛА. Для осуществления счисления пути необходимо располагать данными о направлении движения ЛА и его ускорении или скорости движения относительно поверхности Земли. При этом пройденный путь определяется двукратным интегрированием ускорения или однократным интегрированием скорости по времени. Последнее, это ничто иное как умножение скорости движения на время.
Практически счисление пути, как метод определения местонахождения, используется в авиации с тех пор, как на борту ЛА появились измерители курса и скорости полёта.
По мере развития ПНК, ручная прокладка пути по карте заменялась на автоматическое счисление пути по данным воздушной скорости и курса. Точность такой системы ограничивалась отсутствием достоверных данных о скорости ветра. В начале 50-х годов XX века начинается освоение доплеровских навигационных систем (ДИСС), с помощью которых становится возможным существенное уменьшение погрешности при определении путевой скорости и угла сноса.
Недостатком способа счисления пути является то, что при нём происходит рост ошибок определения местоположения ЛА во времени.
По видам, счисление пути подразделяется в зависимости от способов выполнения:
- графическое, выполняемое на карте методом графических построений;
- аналитическое (письменное), выполняемое с помощью вычислений по аналитическим формулам.
В аэронавигации, счислением по карте называют прокладку линии фактического пути. Различают штилевую, полную и обратную прокладки:
- Полная прокладка подразумевает определение текущего места ВС и производится непосредственно в полёте.
- Штилевая прокладка, это нанесение на карту линии перемещения ВС относительно воздуха, то есть без учёта его перемещения вместе с воздушными массами.
- Обратная прокладка применяется для определения линии фактического пути по известному месту ВС.
Источник
ДИСС. Курсодоплеровское и курсовоздушное счисление




![]()
![]()
Доплеровский измеритель скорости и сноса (ДИСС) – бортовое радиотехническое устройство, позволяющее измерять на борту ВС его путевую скорость и угол сноса.
ДИСС основан на использовании эффекта, открытого австрийским физиком Х.Доплером (C.Doppler) в 1842 г. Эффект заключается в том, что если источник излучения волн движется по направлению к приемнику, то приемник воспринимает частоту больше, чем частота излучаемая на самом деле. И наоборот, если источник удаляется, то принимаемая приемником частота меньше излучаемой. Этот эффект справедлив для любых волновых процессов: электромагнитного излучения, в том числе и светового, звуковых волн и т.д.
ДИСС является автономным устройством, то есть не требует для своей работы установки какого-либо оборудования на земле. Основными составными частями бортового оборудования являются передатчик и приемник с антеннами, вычислительное устройство и пульты управления и индикации. Передатчик через антенну излучает радиоволны сверхвысокой частоты (порядка 9-13 ГГц), но не во все стороны, а по трем или четырем узконаправленным лучам. Соответственно различают трехлучевые и четырехлучевые ДИСС. Лучи наклонены к земле и расположены под углом к продольной оси ВС. У четырехлучевого ДИСС они направлены влево-вперед, вправо-вперед, влево-назад и вправо назад (рис. 8.4).
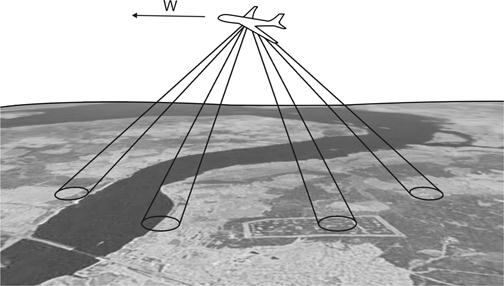
Рис. 8.4. Принцип работы ДИСС
Радиоволны, излучаемые по этим лучам, отражаются от земной поверхности и принимаются приемником через антенну.
ВС летит вперед, спереди земля «набегает» на него, поэтому частота отраженных радиоволн для лучей, направленных вперед, будет больше излучаемой передатчиком. Соответственно для лучей, направленных назад, отраженная частота будет меньше излучаемой, поскольку отражающая земная поверхность удаляется, «уходит» от самолета.
Но ВС движется относительно земли в направлении вектора путевой скорости, который в общем случае не направлен по продольной оси самолета из-за наличия угла сноса. Следовательно, ВС имеет еще и боковое перемещение относительно своей продольной оси. Тогда, если, например, ветер сносит самолет вправо, то справа земля «набегает», а слева – удаляется от самолета. Следовательно, для лучей, направленных вправо, отраженная частота будет больше, чем для лучей, направленных влево.
В результате оказывается, что для каждого из четырех лучей частота отраженного сигнала различна. По измеренным значениям этих частот можно рассчитать путевую скорость и угол сноса, что и делает вычислитель.
Значения угла сноса и путевой скорости отображаются на индикаторах, которые могут иметь различный вид. На индикаторе (рис.8.5) угол сноса индицируется стрелкой, а путевая скорость в цифровом виде.

Рис. 8.5. Индикатор ДИСС
Точность ДИСС является высокой. Погрешность измерения W составляет 3-5 км/ч, а угла сноса 0,3…0,5° .
Для управления ДИСС имеется пульт (рис.8.6) Он предназначен для включения устройства, его предполетного контроля. Переключатель «Суша-Море» в полете устанавливается в положение, соответствующее характеру подстилающей поверхности. Необходимость этого обусловлена различием характера отраженного сигнала от земной и водной поверхности.

Рис. 8.6. Пульт управления ДИСС
В некоторых ситуациях в полете ДИСС перестает выдавать информацию. Это может произойти при большом крене ВС, когда луч, направленный в сторону, противоположную крену, приподнимается. В этом случае точка отражения луча от земли будет очень далеко, а отраженный сигнал слишком слабым.
Также отраженная радиоволна может не вернуться при полете над гладкой водной поверхностью, когда луч отражается от нее как от зеркала.
В таких случаях ДИСС переходит в режим «Память». На индикаторе загорается красное табло с соответствующей надписью, а значения путевой скорости и угла сноса «замораживаются», то есть сохраняются такими, какими они были в момент пропадания сигнала. При появлении отраженного сигнала индикация восстанавливается.
В гражданской авиации используются ДИСС различных марок. Наиболее распространенные ДИСС-3, ДИСС-013 и другие.
Курсодоплеровское счисление пути. Счисление пути, осуществляемое по измеренным значениям курса, путевой скорости и угла сноса, называется курсодоплеровским. На ВС, где осуществляется курсодоплеровское счисление, оно ведется в частноортодромической (а фактически – в прямоугольной) системе координат OZS. Ось S направлена по ЛЗП в направлении полета, а ось Z вправо от ЛЗП. Поскольку ось S совпадает с ЛЗП, то и угол карты совпадает с заданным путевым углом (рис. 8.8):

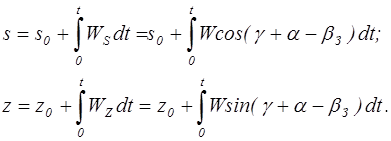
Измеряемые параметры позволяют определять положение вектора путевой скорости относительно линии заданного пути и разложить его на составляющие по осям координат. Для этого W необходимо умножить на синус и косинус угла, под которым W направлен к ЛЗП, то есть на разность фактического βф и заданного βз путевых углов, откуда можно записать:
где W – модуль вектора путевой скорости W;
γ – курс воздушного судна;
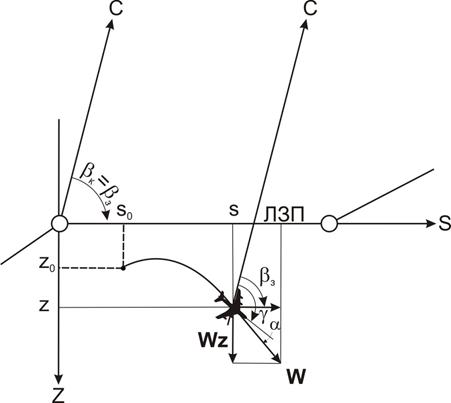
Рис. 8.8. Составляющие вектора путевой скорости
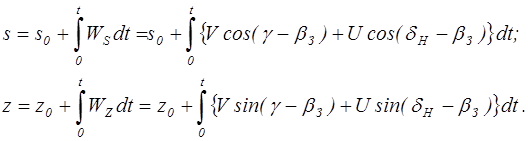
В результате интегрирования составляющих путевой скорости получаем текущие частноортодромические координаты места воздушного судна с учетом их начальных значений:
 (8.2)
(8.2)
Значения путевой скорости и угла поступают в навигационный вычислитель автоматически от ДИСС, текущий курс ВС – от курсовой системы, а значение заданного путевого угла (угла карты) вводится или автоматически из бортовой базы аэронавигационных данных или вручную экипажем при пролете очередного ППМ.
При курсодоплеровском счислении навигационный вычислитель непрерывно рассчитывает параметры ветра. В зависимости от вида системы счисления пути этими параметрами являются либо скорость U и навигационное направление ветра δН, либо составляющие ветра по осям координат US и UZ При внезапном отказе ДИСС по любым причинам навигационная система автоматически переходит в режим “Память”, в котором счисление ведется по запомненным параметрам ветра. Однако в связи с временной и пространственной изменчивостью ветра этот режим длительное время применять не рекомендуется.
Курсовоздушное счисление пути. Данный вид счисления пути применяется при отсутствии информации от ДИСС. Для счисления необходима путевая скорость, но она в данном случае не измеряется, а рассчитывается вычислителем. Очевидно, что составляющие вектора путевой скорости по осям координат равны сумме составляющих векторов истинной скорости и ветра (рис. 8.9).
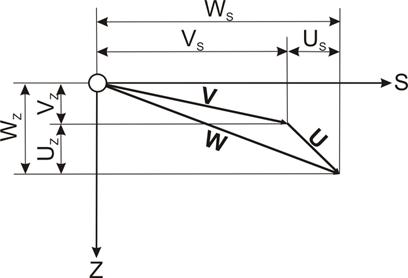
Рис. 8.9. Составляющие векторов навигационного треугольника скоростей
где V – истинная воздушная скорость ВС;
δн – навигационное направление ветра;
U – скорость ветра.
Исходными данными для расчета являются: курс ВС, поступающий от курсовой системы; истинная воздушная скорость – от датчика воздушной скорости или СВС; скорость и направление ветра вводятся экипажем вручную.
При интегрировании составляющих путевой скорости в любой момент времени формируются текущие частноортодромические координаты места ВС:
 (8.3)
(8.3)
Простейшими навигационными вычислителями, использующими названные виды счисления пути, являются НАС-1 и НВУ-Б3.
Источник
Доплеровский способ счисления пути
Методы навигации
Главная промежуточная задача – определение координат МС. Исходя из этого существует три метода:
3. Счисления пути.
Первый – визуально по карте, с использованием различных визиров (РЛ, ИК, оптических). Перечисляю недостатки.
Второй (позиционный) – основан на определении координат МС по линиям положения.
На позиционном методе базируются следующие методы нахождения координат:
— астрономический (определение положения самолета относительно ГМС – геометричесое место светил – точки на земной поверхности, на которые проецируются известные светила).
— Геомагнитный (измерение датчиками магнитного поля Земли и сравнение результатов с заранее известным распределением параметров магнитного поля на местности).
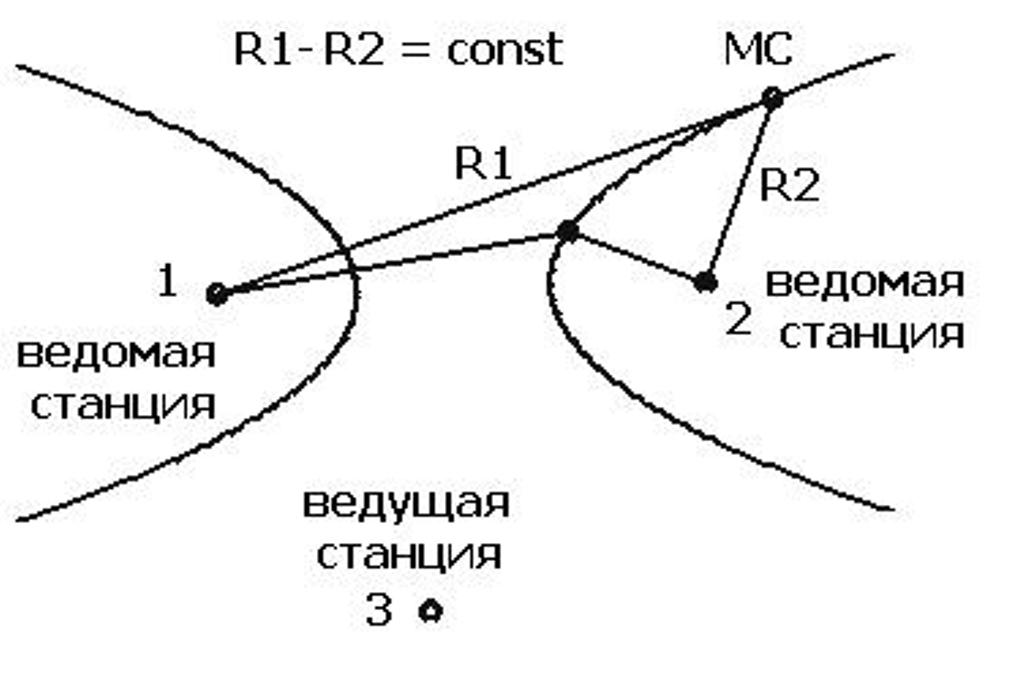
Рис.3.1. Радиотехнический метод определения
координат МС (РСДН).
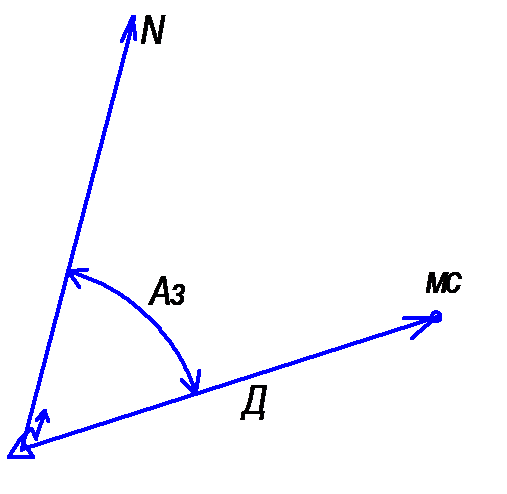
Рис.3.2. Радиотехнический метод определения
координат МС (РСБН).
Метод счисления пути
Основан на определении составляющих вектора путевой скорости полета на оси выбранной системы координат и интегрировании по времени этих составляющих для получения координат точки местонахождения ЛА и пройденного пути.
Метод счисления пути является основным методом навигации (особенно боевой).
Ψ-путевой угол, Wx , Wy – известны.
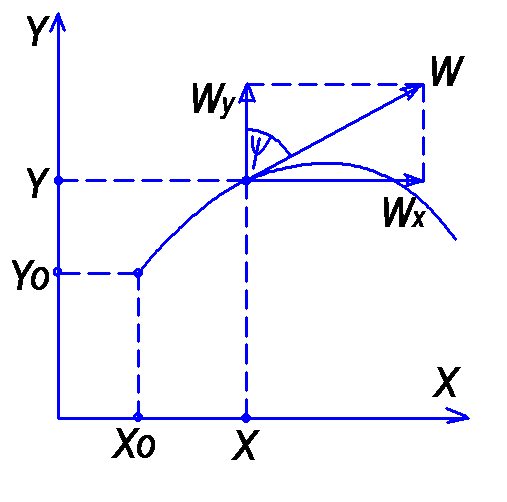
Рис.3.3. Метод счисления пути.

По физической основе методы навигации подразделяют на:
3. Способы счисления пути
Существуют три способа счисления пути:
Аэрометрический
Заключается в определении координат местоположения ЛА путем интегрирования его воздушной скорости и скорости ветра в горизонтальной системе координат.

Рис.4.1. Аэрометрический способ счисления пути.
δ – угол ветра, ψп – путевой угол.


Датчики: курсовая система, система СВС, информация о ветре от метеонаблюдений.
Направление ветра: навигационный и метеорологический ветер.
Географическая СК
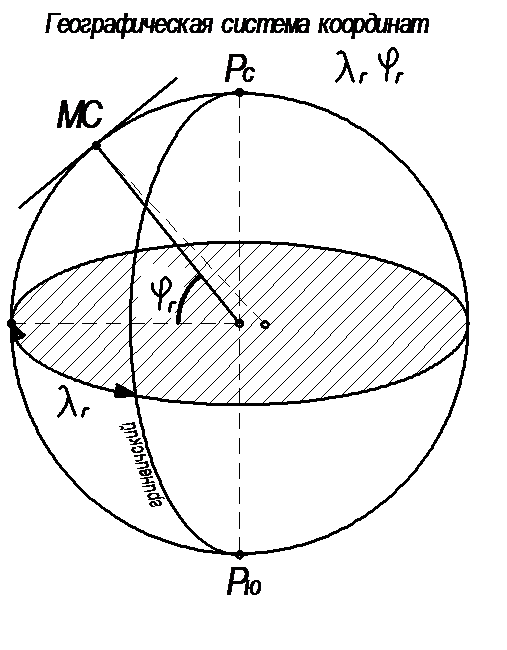
λг – географическая долгота (0 ± 180 о ): двугранный угол, заключенный между плоскостями начального (Гринвичского) меридиана и меридиана данной точки (М).
φг – географическая широта (0 ± 90 о ): угол, зключенный между плоскостью экватора и нормалью к поверхности элипсоида (геоида) в данной точке.
Фактически – ортогональная сетка меридианов и параллелей на поверхности элипсоида (геоида).
Нормальная сферическая СК
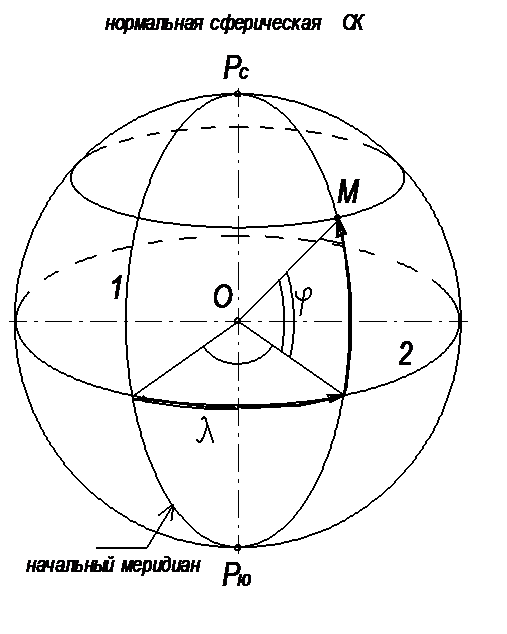
В этой системе производится замена Земного элипсоида (геоида) шаром – для облегчения расчетов.
Экватор совпадает с плоскостью географического экватора, плоскость начального меридиана совпадает с плоскостью гринвичского меридиана.
Наименование и обозначение координат: нормальная сферическая широта ( φ) и нормальная сферическая долгота (λ).
Определения такие же, как для географической СК.
Ортодромическая СК
Представляет собой косую сферическую систему координат, экватор которой располагается в требуемом направлении и называется главной ортодромией (условным экватором).
Равноудаленная точка от главной ортодромии принимается за полюс Р0 ортодромической системы координат.
Z(z) – ортодромическая широта, линейная (угловая) мера. Для угловой меры – угол между плоскостью главной ортодромии и направлением из центра Земного шара в данную точку на его поверхности.
X(x) – ортодромическая долгота, линейная (угловая мера соответственно. Для угловой меры: двугранный угол и между плоскостью начального ортодромического меридиана и меридиана данной точки.
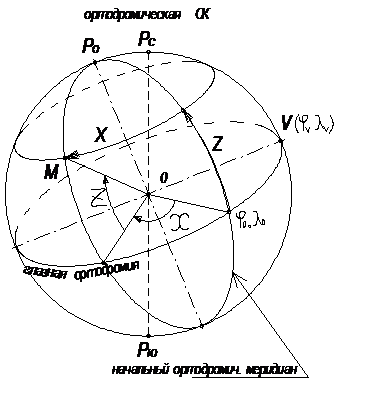
Переход от сферических систем к ортодромическим осуществляется по формулам. Параметры, определяющие связь этих СК: координаты начала точки отсчета (φо λо) и координаты вертекса V (φо λо) главной ортодромии (точки главной ортодромии с наибольшей широтой).
Нормальная земная СК (прямоугольная правая)
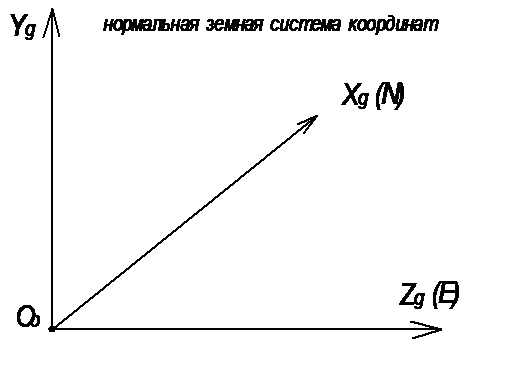
Обозначение O0 Xg Yg Zg . Точка O0 зафиксирована на поверхности Земли. Ось O0Yg – по местной вертикали вверх; OZg и OYg – в соответствии с задачей полета (например, по касательной к меридиану и параллели на север и восток соответственно).
5. Принципы построения ИНС
А). Система координат
Рассматриваем ИНС платформенного типа, с платформой, стабилизированной в системе координат, связанной с Землей, при этом платформа непрерывно следит за плоскостью горизонта.
Б). Принцип действия акселерометра.
Акселерометром называется устройство для измерения ускорения движения подвижного объекта.
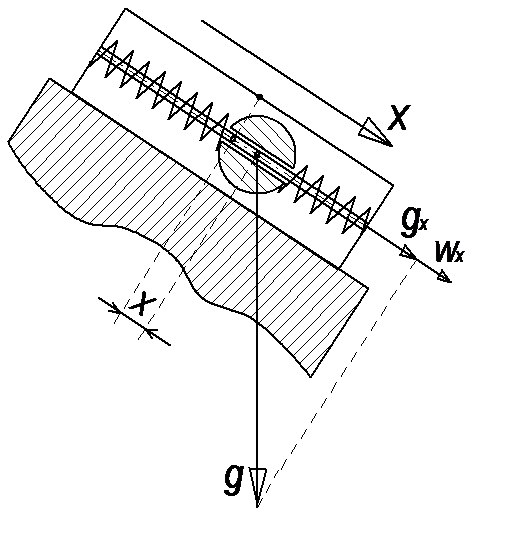
Wx – абсолютное ускорение объекта.
Из рисунка видно, что акселерометр измеряет не абсолютное (т.е. интересующее нас ускорение), а кажущееся:

Рассмотрен упрощенный случай. Кроме gx вредное влияние оказывает сила инерции Кориолиса, центробежная сила.
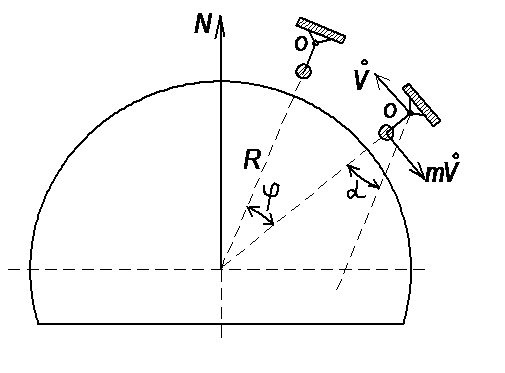
В). Платформа и акселерометры
Почему акселерометры должны быть установлены строго горизонтально и сколько их должно быть?
— Вектор абсолютного ускорения имеет три координаты, стало быть должно быть три акселерометра.
— Возможность моделирования маятника Шулера;
— Возможность измерения составляющих путевой скорости наиболее простым способом;
Г). Маятник Шулера. Условия невозмущаемости
Поворот против часовой стрелки. В этом же направлении поворачивается вертикаль, проходящая через ось маятника.



Условие невозмущаемости окончательно:
Для малых колебаний:

Теорема Шулера (1923):
Если создать маятник с плечом, равным радиусу Земли R, а массу маятника поместить в её центр, то при движении точки подвеса с ускорением его плечо не будет отклоняться от местной вертикали.
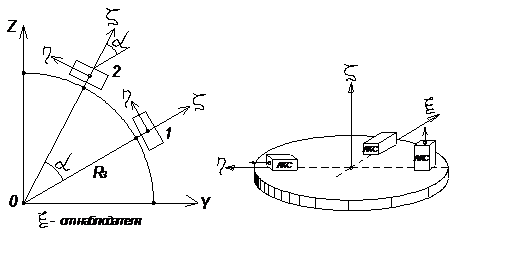
Д). Платформы с интегральной коррекцией. Физическая модель маятника Шулера

На платформе установлены акселерометры (три), гироскопы(три).
Пусть платформа движется по дуге радиуса R со скоростью Vη из точки 1 в точку 2 → поворот вокруг оси ξ необходим по часовой стрелке (знак «-» ):

Поворот вокруг осей ξ и η с требуемыми угловыми скоростями осуществляют, прикладывая к гиростабилизатору с помощью датчиков моментов управляющие моменты М1 (относительно оси кси) и М2(относительно оси эта)
Тогда в соответсвии с правилом прецессии платформа будет поворачиваться угловыми скоростями:


К=Н/R – условие баллистической невозмущаемости.

Е). Принципиальное отличие маятниковой коррекции от интегральной.
Ж). Гиростабилизированная платформа. (силовая гироскопическая стабилизация).
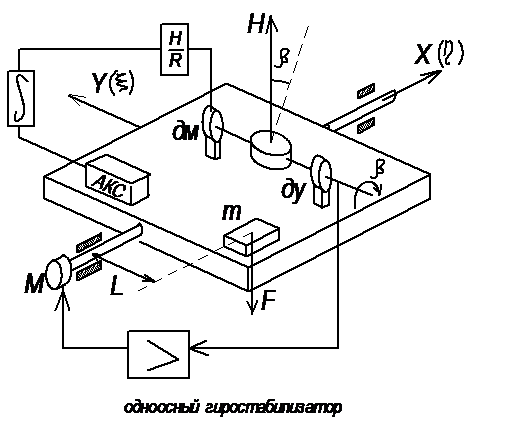
Гиростабилизаторы служат для обеспечения заданной ориентации в пространстве ряда устройств (антенн, прицелов, орудий). В том числе и акселерометров.
Стабилизируемое устройство размещают на платформе, имеющей подвес с одной, двумя или тремя осями (как в ИКВ, карданов подвес).
На рисунке: ось Х — ось стабилизации; β – угол прецессии.
F*L →Mв → β → сигнал с ДУ → Мс = Мв – прекращение прецессии.
Таким образом электродвигатель разгружает платформу.
З). Коррекция гироплатформы в азимуте.
Осуществляется за счет приложения к гироскопу гироплатформы с помощью датчика момента ДМ3 управляющего момента М3, обеспечивающего поворот платформы со скоростью:
И). Принцип действия платформенных ИНС.
1. Удержание платформы в горизонтальной плоскости за счет приложения управляющих моментов, пропорциональных скорости движения самолета, коэффициент пропорциональности определяется условием невозмущаемости платформы;
2. обеспечение требуемого закона управления платформой в азимуте;
3. вычисление скорости движения самолета путем интегрирования сигналов акселерометров.
Основа конструкции – трехосная гиростабилизированная платформа с тремя гироскопами и тремя акселерометрами.
6.Гиростабилизированная платформа
Гироплатформа представляет собой основание, помещенное в рамки карданова подвеса и имеет три степени свободы для вращения.
Карданов подвес имеет не две, а три рамы (как в АГД):
— внутренняя рама крена,
— внешняя рама крена.
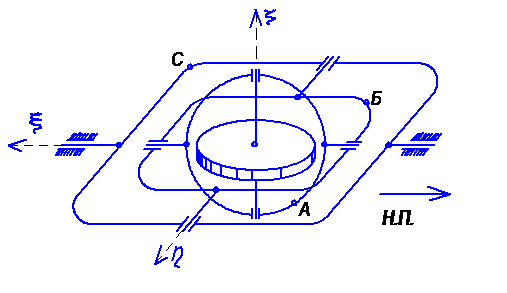
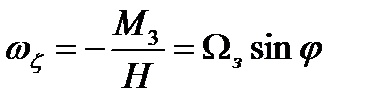
Рис.1.2. Схема расположения рамок курсовертикали КВ-1:
А – внутренняя рама крена; Б – рама тангажа; С – внешняя рама крена.
Основание с помощью оси закреплено во внутренней раме крена на шарикоподшипниках.
Оси подвеса расположены так, что ось ГП, подвешенной во внутренней раме крена, вертикальна, оси внутренней рамы крена и рамы тангажа в начальном положении горизонтальны. Ось внешней (следящей) рамы крена параллельна оси ВКР, дублирует ее и с помощью следящей системы повторяет ее движение. Следящая рама обеспечивает невыбиваемость КВ при углах тангажа 90.
Узел внутренней рамы подвешивается в раме тангажа. На оси внутренней рамы крепится ДМ-10 и СКТ крена. Внутренняя рама крена может поворачиваться в раме тангажа на угол 20 град.
Узел рамы тангажа подвешивается во внешней раме крена. На оси рамы тангажа –ДМ-10 и СКТ тангажа. Рама тангажа может поворачиваться во внешней раме крена на угол 110 град.
Внешняя рама подвешивается в корпусе. На оси внешней рамы крепятся ДМ-3 и СКТ крена.
Курсовертикаль герметична. Для улучшения теплового режима курсовериткаль заполняется гелием.
На платформе размещены три двухстепенных гироскопа типа ГБ-6. Оси чувствительности гироскопов взаимноперпендикулярны. 3Г вместе с системой разгрузки осуществляет стабилизацию платформы относительно вертикальной оси. 1Г и 2Г осуществляют стабилизацию относительно осей крена и тангажа. Оси прецессии гироскопов 1и 2 параллельны плоскости платформы, а оси собственного вращения перпендикулярны этой оси.
На платформе помимо трех ГБ-6, трех ДА-3 установлены два блока усилителей БУ-17, блок усилителей У-148, 4 диода в цепи питания ДКР-1.
Гироблок ГБ-6 состоит из:
гироузла, датчика угла ДУ-17, датчика момента ДМ-9, электродвигателя с катящимся ротором ДКР-1, системы термостабилизации.
Внутри гироблока на двух подшипниках подвешен гироузел, состоящий из рамы, на которой крепится гиромотор ГМС-5. Внутренняя полость гироузла заполнена водородом.
Гиромотор ГМС-5 представляет собой симметричный, одностаторный двигатель обращенной конструкции открытого типа. Основные узлы — статор и ротор. Ротор представляет собой стальной маховик. Обмотка статора- трехфазная.
ГМС-5 – синхронный двигатель гистерезисного типа. Вращающий момент гистерезисного двигателя можно рассматривать как сумму моментов
Момент от вихревых токов равен нулю при синхронном вращении ротора с магнитным полем статора и максимален при пуске. Ротор намагничивается непосредственно в поле статора. При повороте внешнего поля между ним и полюсами наведенного на роторе магнитного поля появляется пространственный сдвиг, обусловленный гистерезисом материала, и возникает электромагнитный момент. В процессе пуска и разгоне, когда ротор вращается с меньшей скоростью, чем скорость поля, ротор перемагничивается и в нем выделяются потери, пропорциональные скольжению. При синхронном вращении ротора с магнитным полем статора потери на перемагничивание ротора отсутствует, и двигатель работает как синхронный.
ДКР-1 состоит из статора и ротора. Статор представляет собой пакет, набранный из листов электротехнической стали, в пазы которого уложена обмотка. На зубцы пакета статора посажено цилиндрическое каленое ферромагнитное кольцо с пазами. Каленый ротор обкатывается по кольцу. Принцип действия ДКР-1 основан на одностороннем притяжении ротора к статору электромагнитными силами, результирующий вектор которых нормален к поверхности статора и вращается вокруг его центра, в результате чего ротор обкатывается без скольжения по поверхности статора.
Рис.1.4. Устройство гироблока:
Акселерометры
Акселерометр (рис.2.1.) состоит из датчика ДА-3, предварительного усилителя БУ-17, усилителя У-133, преобразователя У-134 и масштабного сопротивления Rн.
Принцип действия акселерометра основан на уравновешивании инерционных сил, возникающих при действии на чувствительный элемент датчика акселерометра ускорений, силами взаимодействия электрического тока с полем постоянного магнита.
Чувствительный элемент датчика – маятник, подвешенный на цапфах, на каркасе маятника расположены две обмотки: вторичная обмотка (обмотка ротора) индукционного датчика угла и обмотка обратной связи.
При действии ускорений на маятник действует инерционный момент Ми, пропорциональный действующему ускорению, под влиянием которого маятник перемещается
Вследствие перемещения расположенной на маятнике катушки ротора датчика угла относительно статора, в катушке ротора наводится переменная ЭДС, фаза которой определяется направлением смещения чувствительного элемента от нулевого положения, следовательно, направлением действия ускорения.
Сигнал с роторной обмотки индукционного датчика угла поступает на вход усилителя БУ-17, затем усилителя У-133, где он усиливается в сигнал постоянного тока. Усилитель У-134 является преобразователем синусоидального напряжения 5В. 10кГц в прямоугольное 0,7В, является опорным для усилителя У-133.
С усилителя У-133 напряжение поступает на обмотку обратной связи. расположенную в поле постоянного магнита. и выходное сопротивление Rн .
Взаимодействие магнитного поля обмотки обратной связи с полем постоянного магнита создает момент Мос, пропорциональный величине тока в обмотке обратной связи и уравновешивающий инерционный момент
При уравновешивании моментов
направление тока в обмотке обратной связи соответствует знаку ускорения, а его значение пропорционально действующему на датчик ускорению
Напряжение , снимаемое с выходного сопротивления
Напряжение, снимаемое с масштабного сопротивления Rн, пропорционально действующему ускорению.
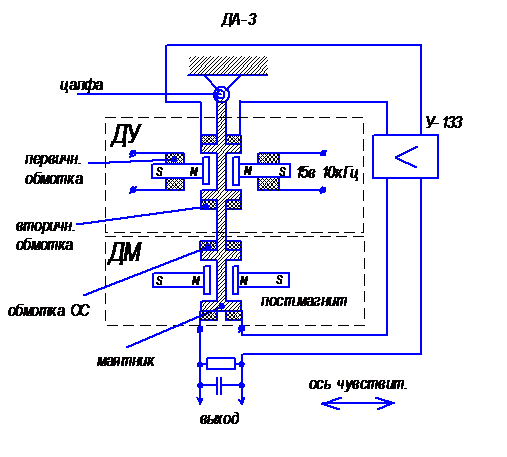
Рис.2.1. Акселерометр ДА-3.
Магнитная система акселерометра показана на рис.2.2:
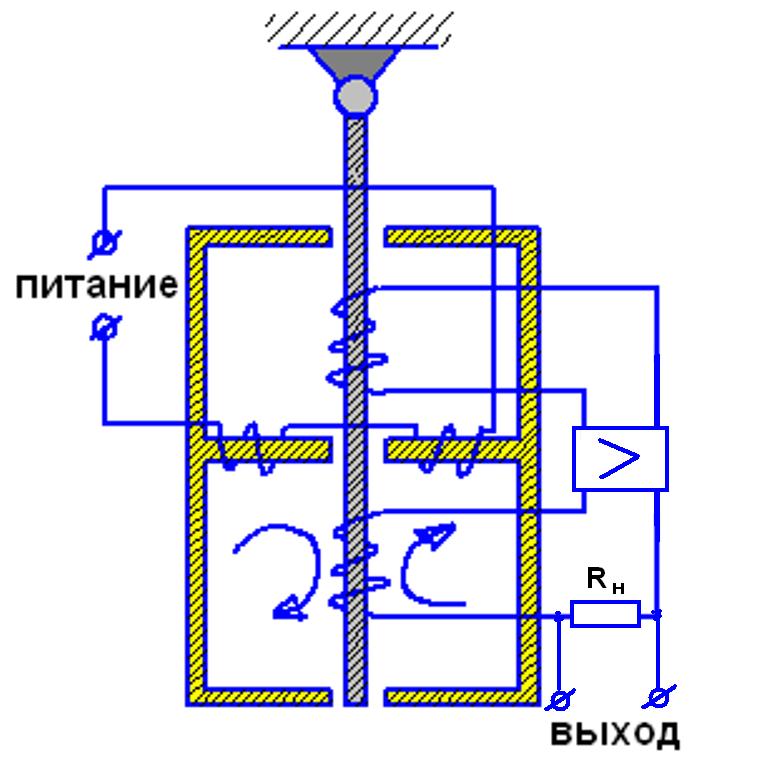
Рис.2.2. Магнитная система акселерометра
Комплект системы
1. Курсовертикаль КВ-1;
2. Блок усилителей гиродатчика БУГ-14;
3. Блок коррекции БК-20;
4. Индукционный датчик ИД-6;
5. Коррекционный механизм КМ-2;
6. Пульт начальных данных ПНД-1;
Режимы начальной выставки.
Другие названия: настройка, автоматическая подготовка ИКВ к работе.
Происходит в два этапа (два подрежима соответственно):
— ускоренный выход ГП в горизонт и в азимуте (УВ);
— точный выход ГП в горизонт и в азимуте и запоминание дрейфа гироплатформы (ТВ).
Ускоренный выход (подрежим УВ), рис.2.1.-2.3.
УВ предназначен для быстрого согласования положения ГП относительно корпуса КВ-1 и в азимуте по одному из выбранных направлений.

Рис.2.1. Ускоренный выход (управление рамой внешнего крена):
УВР – усилитель внешней рамы; ДМ-3 – датчик момента;
СКТ – синусно-косинусный трансформатор.
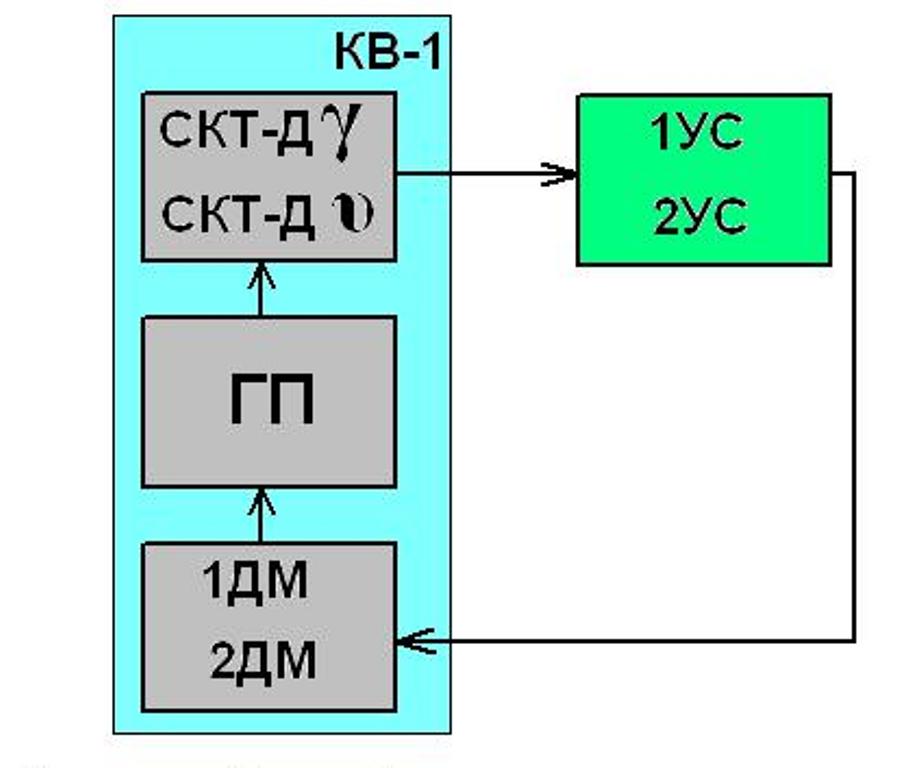
Рис.2.2.Ускоренный выход по тангажу и внутреннему крену:
ДМ – датчики моментов гироблоков; ГП – гироплатформа; УС – усилители.
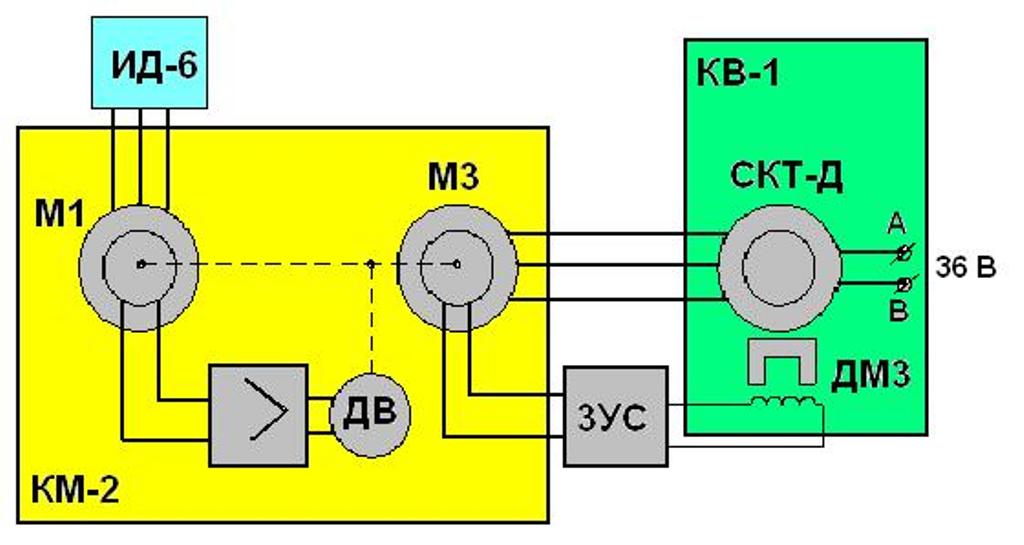
Рис.2.3. Ускоренный выход, канал курса:
ИД – индукционный датчик; КМ-2 — коррекционный механизм; ДМ – датчик момента курсового гироблока; ДВ – двигатель отработки; М1, М2 , СКТ – синусно-косинусные трансформаторы; УС – усилитель.
Окончание режима УВ определяется окончанием раскрутки гиромоторов (моментом вхождения гиромоторов в синхронизм). Этому моменту соответствует минимальный ток, потребляемый гиромотором. Блок контроля выдает команду на переход к режиму ТВ.
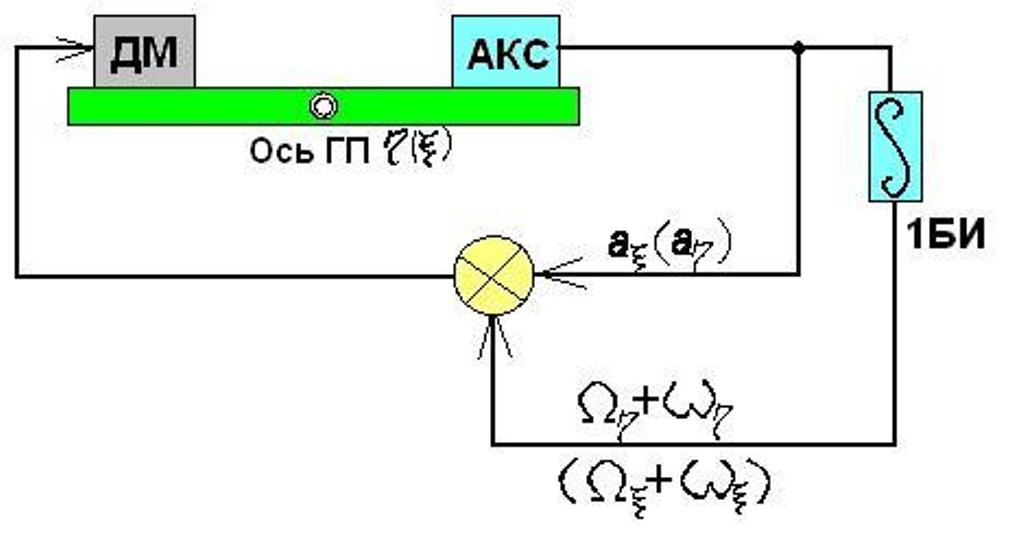
Точный выход (подрежим ТВ)
Режим предназначен для точной выставки ГП в плоскость горизонта и в азимуте, а также для запоминания дрейфов ГП по каждой из ее осей.
В этом режиме сигнал ускорения аξ (аη) с акселерометра поступает через усилитель 1УДМ (2УДМ) на датчик момента соответствующего гироблока 1Г (2Г) по двум цепям (контурам). При этом с течением времени происходит «перекачка» сигнала в контур, содержащий интегратор.
Функциональная схема для крена и тангажа (рис.2.4.):
10.–
Решаемые задачи в ПНК
ПНК предназначен для решения задач навигации и посадки и выдачи навигационной информации на индикаторные приборы и в САУ для выполнения автоматического, полуавтоматического или ручного управления самолетом.
ПНК обеспечивает решение следующих навигационных задач:
· Полет по заданному маршруту с выходом самолета в район заданных пунктов маршрута;
· Автоматическое счисление координат по данным инерциальных и радиотехнических измерителей;
· Определение и выдачу потребителям и на индикаторные приборы основных навигационных параметров;
· Возврат самолета на аэродром посадки;
· Выполнение предпосадочного маневра;
· Заход на посадку до высоты 40-50 м;
· Повторный заход на посадку.
· Инерциальная курсовертикаль ИКВ-1;
· Доплеровский измеритель скорости и угла сноса ДИСС-7
· Радиотехническая система ближней навигации РСБН-6;
· Система воздушных сигналов СВС-72;
· Рама амортизационная РА-5.
Время подготовки комплекта КН-23 к вылету определяется временем готовности ИКВ-1.
В навигационном комплексе используется курсовой способ навигации, параметрами которого являются заданный курс, КУР и дальность до цели Дц или ППМ. Счисление координат Х, У производится по yорт, скорости полета, информация о которой поступает в БВН (блок вычисления навигации) от ИКВ, СВС, ДИСС. РСБН-6 связующее звено.
В зависимости от того, какой из датчиков скорости используется для счисления координат, комплекс может использоваться в инерциально- доплеровском режиме, режиме инерциального счисления координат, режим счисления по Vист от СВС, режим радиокоррекции.
Выбор оптимального режима работы комплекса в смысле наибольшей точности счисления координат производится автоматически в блоке связи БСАД РСБН без участия летчика по сигналам вычислителя «исправность СС», инерциальной курсовертикали «исправность V, V», исправность СВС и в зависимости от крена и тангажа.
Инерциально-доплеровский режим является основным режимом навигации. В этом режиме счисление ортодромических координат производится по Wx, Wzот ДИСС и yорт от ИКВ при наличии сигнала исправность СС и углах -10

Общие условия выбора системы дренажа: Система дренажа выбирается в зависимости от характера защищаемого.

Папиллярные узоры пальцев рук — маркер спортивных способностей: дерматоглифические признаки формируются на 3-5 месяце беременности, не изменяются в течение жизни.


Механическое удерживание земляных масс: Механическое удерживание земляных масс на склоне обеспечивают контрфорсными сооружениями различных конструкций.
Источник



