
КЛАССИФИКАЦИЯ АВТОМАТИЧЕСКИХ РЕГУЛЯТОРОВ
АВТОМАТИЧЕСКИЕ РЕГУЛЯТОРЫ
Управление, сопровождающееся непрерывным контролем, называют регулированием, а параметр, которым необходимо управлять, т. е. регулировать, — регулируемой величиной.
Регулирование, при котором управление осуществляется различными устройвами без вмешательства человека, называют автоматическим регулированием, а совокупность устройств, состоящих из измериельного элемента (первичного преобразователя), исполнительного механизма и регулирующего органа, называют автомашинным регулятором.
Система автоматического регулирования (рис. 1) представит собой совокупность отдельных элементов, направленно действующих друг на друга. В сравнивающем устройстве происходит сравнение текущего значения регулируемой величины X, которое поступает по главной обратной связи, с ее заданным значением X0.
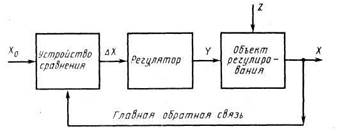 |
Рис. 1 Схема системы автоматического регулирования
КЛАССИФИКАЦИЯ АВТОМАТИЧЕСКИХ РЕГУЛЯТОРОВ
Регуляторы разделяются по следующим признакам.
1.. По способу действия: регуляторы прямого и непрямого (косвенного) действия. У регуляторов прямого действия регулирующий орган перемещается за счет энергии Самого объекта, воздействующего на чувствительный элемент. У регуляторов непрямого действия регулирующий орган перемещается за счет дополнительного источника энергии (электроэнергия, сжатый воздух, жидкость под давлением).
2. По роду действия: регулятор прерывистого (дискретного) и непрерывного действия.
В регуляторах непрерывного действия непрерывному изменению регулируемого параметра соответствует непрерывное перемещение регулирующего органа, между входной и выходной величинами существует непрерывная функциональная связь.
В регуляторах прерывистого действия непрерывной функциональной связи нет. Прерывистые системы можно разделить на две основное группы: релейные и импульсные.
Релейной системой автоматического регулирования называется такая система, которая в своем составе среди основных элементов имеет хотя бы один релейный элемент. Под релейным элементом подразумевается такой элемент системы, в котором непрерывному изменению входной величины соответствует скачкоообразное изме-
нение выходной величины, появляющейся лишь при вполне определенных значениях входной величины (электромагнитное реле).
Импульсной системой автоматического регулирования называется такая система, которая в своем составе имеет хотя бы один-импульсный элемент. Импульсный элемент преобразует непрерывное входное воздействие в ряд кратковременных импульсов,появ-ляющихся через определенные промежутки времени.
3. По роду энергии: электрические пневматические, гидравлические, электрогидравлические и электропневматические.
По закону регулирования:
а) пропорциональнее регуляторы, или П-регуляторы (статические);
б) интегральные регуляторы или И-регуляторы (автоматические);
в) пропорционально – интегральные регуляторы, или ПИ-регуляторы (изодромные);
г) пропорционально-дифференциальные регуляторы, или ПД-регуляторы (пропорциональные регуляторы с предварением);
д) пропорционально — интегрально-дифференциальные регуляторы, или
ПИД-регуляторы (изодромные регуляторы с предварением);
По назначению: регуляторы температуры, давления, расхода и т. д.
В зависимости от выполняемой функции: регуляторы соотношения, программные, самонастраивающиеся» стабилизирующие.
8. Регулятор температуры прямого действия. Регулятор, у которого регулирующий орган перемещается за счет энергий самого объекта, воздействующего на чувствительный элемент, называется регулятором прямого действия. Системы регулирования, использующие регуляторы прямого действия, называются системами прямого регулирования.
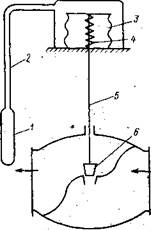
Рассмотрим работу регулятора температуры прямого действия типа РПД (рис. 1. Этот регулятор состоит из термометрической системы и клапана.
Термометрическая система регулятора представляет собой паровой манометрический термометр, в состав которого входят термобаллон 1, капилляр 2 и сильфон 3. Термометрическая система частично заполнена низкокипящей жидкостью, температура кипения которой ниже нижнего предела регулируемой температуры.
При погружении термобаллона в измеряемую среду в термометрической системе устанавливается давление паров рабочей жидкости, величина которого соответствует температуре измеряемой среды. Давление, возникающее в термобаллоне, передается через пар рабочей жидкости по капилляру к сильфону. В сильфоне развивается усилие, пропорциональное его эффективной площади; это усилие уравновешивается усилием пружины 4. Если температура регулируемой среды выше заданного значения, то усилие, развиваемое сильфоном 5, больше усилия пружины 4, вследствие чего сильфон сжимается и при помощи штока 5 перемещает золотник 6 регулирующего клапана вниз. При этом проходное сечение клапана и количество нагревающего вещества, проходящего через клапан, уменьшаются; в результате температура среды понижается и достигает заданного значения. При понижении температуры регулируемой среды сильфон растягивается и клапан приоткрывается, увеличивая подачу нагревающего вещества, вследствие чего температура повышается до заданного значения.
|
Регуляторы, которые воздействуют на регулирующий орган через усилительное устройство и исполнительный механизм, питаемый от внешнего источника энергии, называются регуляторами непрямого действия.
В регуляторе непрямого действия при изменении регулируемой величины усилие или энергия, возникающие в чувствительном элементе, приводят в действие впомогательное устройство, перемещающее регулирующий орган за счет энергии постороннего источника (электрического тока, жидкости под давлением, сжатого воздуха).
Системы регулирования, использующие регуляторы непрямого действия, называются ‘системами непрямого регулирования.
На рис. 1 приведена схема непрямого регулирования уровня жидкости в сосуде. Измерительное устройство (поплавок 1) при помощи рычагов связано с подвижным электрическим контактом.2. Подвижный контакт может замыкаться с одним из неподвижных контактов: Б (больше) и М (меньше). В зависимости от того, с каким из этих контактов замкнется подвижный контакт, электродвигатель 3 вращается в ту или другую сторону. Через червячный редуктор и систему рычагов электродвигатель открывает или закрывает регулирующий орган — клапан 4, установленный на линии подвода жидкости Q1 в бак.
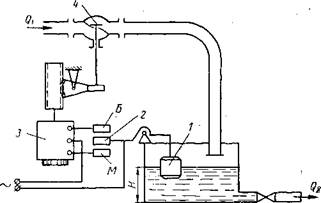 Если расход жидкости Q2 из бака увеличится, то уровень воды в в нем уменьшится и поплавок 1 опустится. При этом подвижный контакт 2 коснется верхнего неподвижного контакта Б, электрическая цепь замкнется, двигатель включится и будет вращаться в направлении открытия регулирующего клапана 4, тем самым увеличивая приток воды в бак. Работа регулятора будет продолжаться до тех пор, пока в баке не восстановится заданный уровень жидкости я подвижный контакт 2 не установится между неподвижными контактами Б и М, в результате чего цепь двигателя будет отключена.
Если расход жидкости Q2 из бака увеличится, то уровень воды в в нем уменьшится и поплавок 1 опустится. При этом подвижный контакт 2 коснется верхнего неподвижного контакта Б, электрическая цепь замкнется, двигатель включится и будет вращаться в направлении открытия регулирующего клапана 4, тем самым увеличивая приток воды в бак. Работа регулятора будет продолжаться до тех пор, пока в баке не восстановится заданный уровень жидкости я подвижный контакт 2 не установится между неподвижными контактами Б и М, в результате чего цепь двигателя будет отключена.
В описанном регуляторе непрямого действия перемещение регулирующего органа — клапана — производится электрическим исполнительным механизмом, использующим энергию от внешнего источника.
Регуляторы непрямого действия обладают высокой чувствительностью, развивают большое усилие и позволяют осуществить дистанционное управление регулирующим органом.
Источник
Классификация регуляторов по способу действия прямой косвенный
16. Автоматические регуляторы и их настройки. Классификация регуляторов. Центральный регулятор.
Автоматические регуляторы классифицируются по назначению, принципу действия, конструктивным особенностям, виду используемой энергии, характеру изменения регулирующего воздействия и т.п.
По принципу действия они подразделяются на регуляторы прямого и непрямого действия. Регуляторы прямого действия не используют внешнюю энергию для процессов управления, а используют энергию самого объекта управления (регулируемой среды). Примером таких регуляторов являются регуляторы давления. В автоматических регуляторах непрямого действия для его работы требуется внешний источник энергии.
По роду действия регуляторы делятся на непрерывные и дискретные. Дискретные регуляторы, в свою очередь, подразделяются на релейные, цифровые и импульсные.
По виду используемой энергии они подразделяются на электрические (электронные), пневматические, гидравлические, механические и комбинированные. Выбор регулятора по виду используемой энергии определяется характером объекта регулирования и особенностями автоматической системы. В современных системах управления используются цифровые программные регуляторы.
По закону регулирования они делятся на двух- и трех- позиционные регуляторы, типовые регуляторы (интегральные, пропорциональные, пропорционально-дифференциальные, пропорционально-интегральные, и пропорционально-интегрально-дифференциальные регуляторы — сокращенно И, П, ПД, ПИ и ПИД — регуляторы), регуляторы с переменной структурой, адаптивные (самонастраивающиеся) и оптимальные регуляторы. Двухпозиционные регуляторы нашли широкое распространение, благодаря своей простоте и малой стоимости.
По назначению регуляторы подразделяются на специализированные (например, регуляторы уровня, давления, температуры и т.д.) и универсальные с нормированными входными и выходными сигналами, пригодные для Управления различными параметрами.
По виду выполняемых функций регуляторы разделяются на регуляторы автоматической стабилизации, программные, корректирующие, регуляторы соотношения параметров и другие.
Фундаментальные принципы управления
В основе построения САУ есть некоторые общие принципы управления, позволяющие разрабатывать алгоритмы управления в зависимости от фактического функционирования объекта и причин, вызывающих отклонение объекта от заданного.
Принцип разомкнутого управления

Хо — задание, цель управления или алгоритм функцио нирования (вход);
f — возмущающее воздействие;
U — управляющее воздействие;
X — выходные координаты.
В данном случае (УУ) не имеет информации о выходе, т.е. о состоянии (ОУ) -цепочка разомкнута. Неиспользуемая информация об объекте — это существенный недостаток, тем не менее этот принцип широко используется: включить, выключить электродвигатель, освещение, совокупность элементов логических И, ИЛИ, НЕ и т.п.
Для водонагревательного котла — это например таблицы зависимости температуры горячей воды в зависимости от расхода пара. По этой таблице, в зависимости от необходимой температуры горячей воды выбирается расход пара.
Температура горячей воды
Конечно, такой принцип управления для котла использовать нецелесообразно, т.к. возмущение (температура холодной воды, температура пара, неточность заданий расхода пара) не позволяет с высокой точностью управлять температурой горячей воды.
Общей формулой при этом выступает
Принцип компенсации (управление по возмущению)
Если изменения возмущения сильно влияют на выход и эти возмущения можно измерить, то для повышения точ ности управления в разомкнутой цепи вводят, например звено, компенсирующее возмущения.

Принцип обратной связи. Регулирование по отклонениям.
В этом случае вводят дополнительное звено, которое измеряет выход (х) и вырабатывает корректирующее воздействие. Эта схема (рис.3.6) имеет вид замкнутой цепи, поэтому этот метод называют еще принципом управления по замкнутому контуру. Введенную дополнительную цепь называют цепью обратной связи, т.к. она называет передачи воздействий в дополнительной связи обратно направлении передачи основного воздействия на объект. Наиболее широко распространен частный вид замкнутых систем, в которых корректирующий алгоритм управления осуществляется не непосредственно по значениям координат х, а по их отклонениям от значений, определяемым алгоритмом функционирования (например, заданного потолочного значения) Хо, т.е. d х=хо-х. Эта схема показана на рис

По данной схеме управляющее устройство вырабатывает величины d х, называемую отклонением или ошибкой управления. Часто оказывается целесообразным вырабатывать управляющее воздействие в функции не только d х. но также его производных и интегралов по времени и других более сложных функций, например, по пропорционально-интегрально- дифференциальному (ПИД) закону, который будет рассмотрен позже.
Управление в функции отклонения называют регулированием.
Управляющее устройство в этом случае называют автоматическим регулятором. Объект и регулятор образуют замкнутую систему, называемую системой автоматического регулирования (САР).

Рис. З.8. Регулирование по отклонению
Главная идея центрального регулятора заключается в следующем: при цифровом управлении многоконтурным объектом предполагаем, что в окрестности малых ошибок, когда верна гипотеза линейности делается предположение, что все контуры работают независимо и управление осуществляется по одному закону.
 |




| |




| |



 U 1 Y 1
U 1 Y 1
 U 2 Y 2
U 2 Y 2
 |
Структурная схема центрального регулятора представлена выше.
Чтобы установить настройки для i -ого контура необходимо знать динамические свойства объекта. Определение динамических свойств линейных объектов происходит путем подачи на вход воздействия.
В связи с этим выделяют различные типы воздействий по управлению.
Тестовые воздействия по управлению могут быть:


 Ui
Ui
1) импульсное воздействие

 Ui
Ui


 3) частота:
3) частота:

 4) произвольное воздействие:
4) произвольное воздействие:
Соответственно, на каждый тип входного воздействия будет свой тип реакции.


 1. Реакция на импульсное воздействие:
1. Реакция на импульсное воздействие:
2. Реакция на ступенчатое воздействие (скачок):


 y
y
Цель: получить передаточную функцию W ( S ) UiYi
Для ПИД достаточно  , где
, где
 — коэффициент усиления
— коэффициент усиления
 — постоянная времени 1 и 2го порядка
— постоянная времени 1 и 2го порядка
 — время запаздывания
— время запаздывания
 — коэффициент усиления
— коэффициент усиления
Для построения контура динамической стабилизации необходимо знать: 
 В зависимости от значений коэффициентов определяется режим ПИД – регулятора.
В зависимости от значений коэффициентов определяется режим ПИД – регулятора.
—  — можно пренебречь.
— можно пренебречь.
—  — ПИД – регулятор применять нельзя, необходимы дополнительные операции в управлении
— ПИД – регулятор применять нельзя, необходимы дополнительные операции в управлении
—  — ПИД управление.
— ПИД управление.
Источник



