
Классификация АЦП по методам




![]()
![]()
Преобразования
В настоящее время известно большое число методов преобразования напряжение-код. Эти методы существенно отличаются друг от друга потенциальной точностью, скоростью преобразования и сложностью аппаратной реализации. На рисунке 2.9 представлена классификация АЦП по методам преобразования.
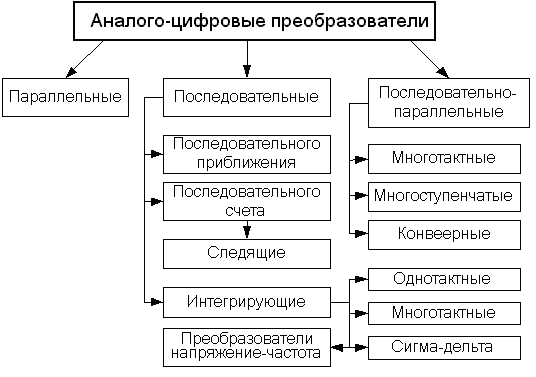
Рис. 2.9. Классификация АЦП
В основу классификации АЦП положен признак, указывающий на то, как во времени разворачивается процесс преобразования аналоговой величины в цифровую. В основе преобразования выборочных значений сигнала в цифровые эквиваленты лежат операции квантования и кодирования. Они могут осуществляться с помощью либо последовательной, либо параллельной, либо последовательно-параллельной процедур приближения цифрового эквивалента к преобразуемой величине.
Источник
4.3 Классификация ацп
Аналого–цифровым преобразователем (АЦП) называют устройство, преобразующее входную аналоговую величину в соответствующий ей цифровой эквивалент – код, являющийся выходным сигналом преобразователя. АЦП обеспечивает как дискретизацию непрерывного сигнала по времени, так и его квантование по уровню.
В последнее время наибольшее распространение получил подход к классификации, основанный на том, как во времени развертывается процесс преобразования аналоговой величины в цифровую. В основе преобразования выборочных значений сигнала в цифровые эквиваленты лежат операции квантования и кодирования. Они могут осуществляться с помощью либо последовательной, либо параллельной, либо последовательно–параллельной процедуры приближения цифрового эквивалента к преобразуемой величине.
Исходя из этого целесообразно разделить методы построения АЦП на последовательные, параллельные и последовательно–параллельные.
Последовательные АЦП со ступенчатым пилообразным напряжением
Этот преобразователь является типичным примером построения АЦП с единичными приближениями (рис. 4.3) и состоит из компаратора, счетчика и ЦАП. На один вход компаратора поступает входной сигнал, а на другой – сигнал обратной связи с ЦАП.

Работа преобразователя начинается с прихода импульса запуска, который включает накопительный счетчик. Процесс преобразования продолжается до тех пор, пока напряжения обратной связи сравняются с входными напряжениями и срабатывает компаратор, который своим выходным сигналом прекратит поступление счетных импульсов на счетчик и осуществит считывание с него выходного кода, представляющего цифровой эквивалент входного напряжения в момент окончания преобразования.
Время преобразование этого АЦП является переменным и зависит от амплитуды входного напряжения.
Статическая погрешность преобразования определяется суммарной статической погрешностью используемых ЦАП и компараторов, при этом надо иметь в виду, что частоту счетных импульсов необходимо выбирать с учетом завершения переходных процессов в них.
АЦП последовательных приближений
Одним из наиболее распространенных является метод порязрядного уравновешивания, называемый также методом последовательного приближения.
Преобразователь этого типа является наиболее распространенным вариантом последовательных АЦП с двоично–взвешенными приближениями (рис. 4.4).
В основе этого класса преобразователей лежит принцип последовательного сравнения измеряемой величины с 1/2, 1/4, 1/8 и т.д. от возможного максимального значения ее. Это позволяет для m – разрядного АЦП выполнить весь процесс преобразования за m последовательных шагов приближения. В то же время статическая погрешность этого типа преобразователей, определяемая в основном используемым в нем ЦАП, может быть очень малой.
Интегрирующие аналого–цифровые преобразователи уступают по быстродействию преобразователям последовательного приближения. Вместе с тем они имеют и явные преимущества: минимальное число необходимых точных компонентов, высокую помехоустойчивость, отсутствие дифференциальной нелинейности, низкую стоимость. Эти свойства интегрирующих АЦП определили их широкое применение для построения измерительных приборов и систем невысокого быстродействия (от одного измерения до нескольких тысяч в секунду), для которых в качестве основных выступают требования высокой точности и нечувствительность к помехам.

Интегрирующий АЦП, как правило, состоит из двух преобразователей: преобразователя напряжения или тока в частоту или длительность импульсов и преобразователя частоты или длительности в код.
Метод параллельного преобразования позволяет строить быстродействующие, хотя и сложные в реализации АЦП. Преобразователи этого типа осуществляют одновременно квантование сигналов с помощью наборов компараторов, включенных параллельно источнику сигнала (рис. 4.5). Пороговые уровни компараторов установлены с помощью резистивного делителя в соответствии с используемой шкалой квантования. При подаче на такой компаратор исходного сигнала на выходах последнего будет иметь место проквантованный сигнал, представленный в унитарном коде. Для преобразования этого кода в двоичный используются логические схемы, называемые обычно кодирующей логикой.
Динамические погрешности при работе без устройства выборки и хранения определяются в первом приближении временем преобразования входного сигнала в унитарный код. Частота преобразования такого АЦП 100 – 200 МГц.
Отечественная промышленность выпускает интегральные АЦП параллельного преобразования серии К1107.

Этот класс преобразователей (рис. 4.6.) позволяет в значительной мере уменьшить объем параллельных преобразователей и увеличить быстродействие последовательных. В приведенном примере 6–разрядного АЦП этого типа два 3–разрядных параллельных АЦП. Первый из них вырабатывает три старших разряда выходного кода. Эти же три разряда поступают на вход 3 – разрядного ЦАП.

Выходной сигнал последнего подается на один вход устройства вычитания, на другой его вход подается входной сигнал. Разность сигналов с устройства вычитания поступает на второй 3–разрядный АЦП, вырабатывающий три младших разряда 6–разрядного выходного кода.
Статическая погрешность АЦП такого типа может достигать значения, соответствующего разрешающей способности 8 – 12–разрядных АЦП, частота преобразования 10 – 20 МГц.
Источник
2.2.7.1 Классификация ацп
Рисунок 40. Классификация АЦП по методам преобразования
В настоящее время известно большое число методов преобразования
напряжение-код [25]. Эти методы существенно отличаются друг от друга
В основу классификации АЦП положен признак, указывающий на то, как
во времени разворачивается процесс преобразования аналоговой величины в
цифровую. В основе преобразования выборочных значений сигнала в цифровые
эквиваленты лежат операции квантования и кодирования. Они могут
осуществляться с помощью либо последовательной, либо параллельной, либо
последовательно-параллельной процедур приближения цифрового эквивалента
к преобразуемой величине.
Параллельные А Ц П
АЦП этого типа осуществляют квантование сигнала одновременно с
помощью набора компараторов, включенных параллельно источнику входного
сигнала. На рисунке показана реализация параллельного метода АЦ-
преобразования для 3-разрядного числа. С помощью трех двоичных разрядов
можно представить восемь различных чисел, включая нуль. Необходимо,
следовательно, семь компараторов. Семь соответствующих эквидистантных
опорных напряжений образуются с помощью резистивного делителя.
Рисунок 41. Схема параллельного АЦП
Если приложенное входное напряжение не выходит за пределы диапазона
от 5/2h, до 7/2h, где h=Uоп/7 – квант входного напряжения, соответствующий
единице младшего разряда АЦП, то компараторы с 1-го по 3-й устанавливаются
92 
в состояние 1, а компараторы с 4-го по 7-й – в состояние 0. Преобразование
этой группы кодов в трехзначное двоичное число выполняет логическое
устройство, называемое приоритетным шифратором.
АЦП последовательного приближения
architecture, SAR) или АЦП с поразрядным уравновешиванием содержит
компаратор, вспомогательный ЦАП и регистр последовательного приближения.
АЦП преобразует аналоговый сигнал в цифровой за N шагов, где N —
Рисунок 42. АЦП последовательного приближения
На каждом шаге определяется по одному биту искомого цифрового
значения, начиная от старшего значащего разряда (СЗР) и заканчивая младшим
значащим разрядом (МЗР). Последовательность действий по определению
очередного бита заключается в следующем. На вспомогательном ЦАП
выставляется аналоговое значение, образованное из битов, уже определённых
на предыдущих шагах; бит, который должен быть определён на этом шаге,
выставляется в 1, более младшие биты установлены в 0. Полученное на
вспомогательном ЦАП значение сравнивается
с входным аналоговым
вспомогательном ЦАП, то определяемый бит получает значение 1, в противном
случае 0. Таким образом, определение итогового цифрового значения
напоминает двоичный поиск. АЦП этого типа обладают одновременно высокой
скоростью и хорошим разрешением. Однако при отсутствии устройства
выборки хранения погрешность будет значительно больше (представьте, что
после оцифровки самого большого разряда сигнал начал меняться).
скорость преобразования, невысокая цена и низкое энергопотребление.
(digital-analog converter, DAC )
предназначен для преобразования числа, представленного, как правило, в виде
двоичного кода, в напряжение или ток, пропорциональные этому числу.
Схемотехника цифро-аналоговых преобразователей весьма разнообразна [25].
На рисунке ниже представлена общая классификация ЦАП по способам
преобразования входного кода и схемам формирования выходного сигнала.
Рисунок 43. Обобщенная классификация ЦАП
Дальнейшую классификацию цифро-аналоговых преобразователей можно
провести по ряду специфических признаков, например:
по роду выходного сигнала: преобразователи с токовым выходом или с
выходом по напряжению;
по типу цифрового интерфейса: с последовательным вводом или с
по числу ЦАП на кристалле: одноканальные и многоканальные;
по быстродействию: низкого, среднего и высокого быстродействия;
Матрица R-2R – самый распространенный метод цифро-аналогового
преобразования. Матрица работает по принципу деления входного напряжения
на входах. Матрица имеет число входов по числу разрядов регистра данных. На
каждый вход через ключ может быть подано опорное напряжение Vref или 0В.
Ключи управляются разрядами регистра данных: “1” – на матрицу подается
Vref, “0” – подается 0В.
Коммутатор опорного напряжения Vref позволяет выбрать внешний или
встроенный источник опорного напряжения.
В регистр данных записывается цифровой код. Регистр данных определяет
Рисунок 44. Модуль ЦАП с типом преобразования «Матрица R-2R»
исполнительными устройствами (приводами) и системами: электродвигателями
постоянного тока с переменной скоростью вращения, источниками питания с
управляемым напряжением, различными индикаторами и т.п. С помощью ЦАП
можно синтезировать аналоговые сигналы различной формы, например,
Контроллеры последовательных интерфейсов
Контроллеры последовательных интерфейсов ориентированы на решение
компьютером, программируемым контроллером. Наиболее часто для
этих целей используют интерфейсы RS-232C, RS-422, USB, IrDA.
Связь с внешними по отношению к микропроцессору периферийными
микросхемами (памяти EEPROM, часов реального времени (RTC) и
т.д.), а также с различными датчиками с последовательным цифровым
выходом. Для этих целей наиболее часто применяются интерфейсы SPI,
I2C, MicroWire, uLAN и другие.
Интерфейс связи с локальной сетью в распределенных информационно-
управляющих системах. В этой сфере находят применение интерфейсы
RS-232C, RS-485, I2C, uLAN, CAN, Ethernet.
Внутрисистемное программирование резидентной памяти программ
(OTPROM, EPROM, FLASH) или данных (EEPROM) у процессоров для
встраиваемых применений. Обычно для этого используется интерфейс
RS-232C (ADuC (Analog Devices), MB90Fxxx (Fujitsu), MSP430 (Texas
Instruments)) или SPI (AVR(Atmel)).
интерфейсов имеются почти у всех встраиваемых процессоров, исключая
простейшие 8-16 выводные микросхемы. У большинства процессоров имеются
несколько таких модулей одного или различных типов.
Среди контроллеров последовательного обмена стандартом «де-факто»
стал модуль универсального синхронно-асинхронного приемопередатчика
(Universal Synchronous/Asynchronous Receiver and Transmitter, USART ). В
названии часто опускают слово «синхронный» и модуль не совсем корректно
именуется UART (чисто асинхронные приемопередатчики сейчас встречаются
достаточно редко). Характеристики последовательного порта UART не
позволяют производить приём и передачу данных за пределы печатной платы.
Для связи с другими устройствами, сигнал от UART необходимо пропустить
через приёмопередатчик, работающий в одном из стандартов:
Обычно модули UART в асинхронном режиме поддерживают протокол
обмена для интерфейса RS-232 (8N1 или 9N1); в синхронном режиме –
нестандартные синхронные протоколы, в некоторых случаях – протокол SPI.
Приемопередатчик – преобразователь уровня, как правило, выполненный в
интегральном исполнении. Предназначен для преобразования электрических
сигналов из уровня ТТЛ в уровень, соответствующий физическому уровню
Контроллер UART обычно содержит:
Источник тактирования (обычно с увеличенной частотой тактирования
по сравнению со скоростью обмена, чтобы иметь возможность
отслеживать состояние лини передачи данных в середине передачи
Входные и выходные сдвиговые регистры.
Регистры управления приемом/передачей данных; чтением/записью.
Параллельная шина данных для буферов приема/передачи.
FIFO буферы памяти (опционально).
Упрощенная структура приемопередатчика типа UART представлена на
Генератор скорости обмена представляет собой делитель внутренней
тактовой частоты процессора Fint с плавно или пошагово (дискретно)
программировании можно настраивать требуемую скорость вне зависимости (в
определенных пределах) от частоты Fint. Для этого используется стандартный
или специально выделенный таймер-счетчик в режиме автоперезагрузки. В
стандартного ряда скоростей необходимо выбирать определенную частоту
Регистр (буфер) данных
Регистр (буфер) данных
Рисунок 45. Модуль UART
С выхода генератора скорости сигнал синхронизации поступает на вход
тактирования приемного и передающего сдвиговых регистров, которые
осуществляют последовательную выдачу/прием бит данных с заданной
скоростью. Полностью принятый байт попадает в регистр – буфер данных
приемника. Байт для передачи помещается в сдвиговый регистр из буфера
Процессы приема и передачи в асинхронном режиме UART происходят
независимо. Таким образом, поддерживается дуплексный режим обмена.
Однако требуется, чтобы приемник и передатчик были настроены на одну
Более простым является функционирование в синхронном режиме. Здесь
каждый принимаемый/передаваемый бит стробируется специальным сигналом
и нет необходимости точно согласовывать скорость приемника и передатчика.
Overrun Error (ошибка
переполнение буфера приема)
Эта ошибка случается, когда приемник UART не успевает обрабатывать
приходящие из канала символы, т. е. буфер переполняется.
Framing Error (ошибка кадрирования)
Эта ошибка случается, когда фиксируется некорректное состояние линии
данных в момент передачи старт- или стоп-бита. Например, после передачи 8
97 






























бит данных приемник ожидает перехода линии в стоп-состояние, но этого не
Break Condition (сигнал прерывания передачи, разрыва связи)
Этот сигнал информирует о том, что входная линия данных находилась в
неизменном нулевом состоянии в течение времени, больше передачи одного
символа. В буфере приема нулевой байт. Некоторые устройства используют
такую последовательность, чтобы сообщить передатчику, например, о переходе
на другую скорость обмена данными.
Пример организации и работы контроллера последовательного канала
ADuC812 (Intel MCS-51)
подразделе этой главы. В разделе 6.3 приведен пример программирования
последовательного канала в учебном стенде SDK-1.1.
Еще более упрощается функционирование в режиме SPI: приемник и
передатчик работают синхронно: приему одного бита соответствует передача
одного бита, начало передачи байта совпадает с началом приема, за сеанс
обмена происходит прием одного байта и передача одного байта.
В большинстве случаев приемопередатчики работают с входными и
выходными сигналами уровней TTL. Формирование физических сигналов с
уровнями напряжения и тока, соответствующими реализуемому интерфейсу,
выполняется с помощью специальных микросхем – трансиверов или адаптеров
физического интерфейса. Например: MAX232 (MAXIM) – RS-232C, MAX485
(MAXIM) – RS-422/485, PCA82C251 (Philips) – CAN.
Кроме рассмотренных приемопередатчиков USART во встраиваемых
процессорах широко используются другие интерфейсы, например, USB, CAN.
Источник



