
- Векторный способ задания движения точки
- Введение
- Основные формулы при векторном способе задания движения
- Скорость точки
- Ускорение точки
- Тангенциальное ускорение
- Нормальное ускорение
- 1.1.3. Ускорение точки при векторном и координатном способах задания движения
- 1.1.4. Ускорение точки при естественном способе задания движения
Векторный способ задания движения точки
Введение
Положение точки однозначно определяется заданием ее радиус-вектора , который изменяется со временем при движении точки. При векторном способе задания движения считается, что задан закон изменения радиус-вектора от времени . Векторный способ задания движения применяется для описания движения в общем виде, используя векторные формулы.
Например, для точки, движущейся с постоянным ускорением , радиус-вектор определяется одной векторной формулой:
,
где – постоянные векторы, не зависящие от времени. Применяя формулы, мы можем найти кинематические величины в векторном виде, не зависимо от выбранной системы координат.
При координатном способе задания движения, мы выбираем систему координат, и в ней задаем зависимости координат точки от времени . Таким образом, координатный способ привязан к выбранной системе координат, а векторный способ не зависит от системы координат.
Связь векторного способа задания движения с координатным осуществляется по формуле:
,
где – единичные векторы (орты) в направлении осей выбранной системы координат.
Основные формулы при векторном способе задания движения
Скорость точки
Выводы приведенных ниже формул и изложение теории приводится на странице “Кинематика материальной точки”. Здесь мы приводим основные результаты этой теории в векторном виде.
Итак, нам задана зависимость радиус-вектора материальной точки M от времени :
.
Дифференцируя радиус-вектор по времени, мы находим вектор скорости точки:
.
Модуль вектора скорости:
,
где в круглых скобках обозначено скалярное произведение векторов.
Скорость точки направлена по касательной к траектории. Пусть – единичный вектор в направлении касательной. Тогда скорость может быть направленной либо вдоль вектора :
,
либо в противоположную сторону:
.
Чтобы охватить эти два случая, вводят алгебраическую величину скорости :
.
Это скалярная величина, равная по абсолютной величине модулю скорости, но она может принимать как положительные, так и отрицательные значения:
.
При , вектор скорости сонаправлен с . При он направлен в противоположную сторону. Величина является проекцией вектора скорости на направление . Поскольку – это единичный вектор, то
.
Единичный вектор в направлении касательной к траектории:
.
Ускорение точки
Дифференцируя вектор скорости по времени, находим вектор ускорения точки:
.
Модуль вектора ускорения:
.
Разложим вектор ускорения на две взаимно перпендикулярные компоненты: – параллельную касательной к траектории; и – перпендикулярную к ней.
.
Компонента называется касательным, или тангенциальным ускорением, а компонента – нормальным ускорением.
Тангенциальное ускорение
Алгебраическая величина тангенциального ускорения – это скалярная величина, равная проекции полного ускорения на направление единичного вектора , касательного к траектории:
.
Тогда вектор тангенциального ускорения можно записать в следующем виде:
.
Величина может быть как положительной, так и отрицательной. При положительном , вектор касательного ускорения сонаправлен с единичным вектором . При отрицательном – вектор касательного ускорения направлен в противоположную сторону. Модуль равен модулю касательного ускорения:
.
Алгебраическая величина тангенциального ускорения равна производной по времени от алгебраической величины скорости:
.
Производная по времени модуля скорости:
.
Если между векторами скорости и ускорения острый угол, то движение ускоренное. Если между ними тупой угол, то движение замедленное.
Нормальное ускорение
Вектор нормального ускорения:
.
; .
Единичный вектор в направлении главной нормали траектории:
.
Вектор перпендикулярен вектору и направлен к центру кривизны траектории. Нормальное ускорение всегда направлено к центу кривизны траектории. Поэтому, если выразить его через единичный вектор главной нормали:
,
то . Поэтому .
Модуль нормального ускорения равен проекции полного ускорения на направление главной нормали:
.
Имеют место следующие формулы:
.
Радиус кривизны траектории:
.
Центр кривизны траектории:
.
Единичный вектор в направлении бинормали:
.
Автор: Олег Одинцов . Опубликовано: 06-03-2016 Изменено: 29-01-2020
Источник
1.1.3. Ускорение точки при векторном и координатном способах задания движения
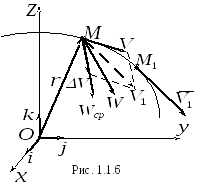 Ускорение точкихарактеризует быстроту изменения её вектора скорости. Пусть точка
Ускорение точкихарактеризует быстроту изменения её вектора скорости. Пусть точка , движущаяся относительно неподвижной системы отсчета, в момент времени
, движущаяся относительно неподвижной системы отсчета, в момент времени занимает положение
занимает положение , а в момент
, а в момент – положение
– положение ; скорости точки в этих положениях представлены векторами
; скорости точки в этих положениях представлены векторами и
и (рис. 1.1.6). Перенесем начало вектора
(рис. 1.1.6). Перенесем начало вектора в точку
в точку и построим параллелограмм, в котором диагональю будет
и построим параллелограмм, в котором диагональю будет , а одной из сторон – вектор
, а одной из сторон – вектор . Другая сторона будет изображать вектор
. Другая сторона будет изображать вектор ,
,
т. е. приращение вектора  за время
за время . Векторная величина
. Векторная величина называется средним ускорением точки за время
называется средним ускорением точки за время , вектор
, вектор направлен так же, как и вектор
направлен так же, как и вектор .
.
Ускорением точки в данный момент времени называется вектор  , равный пределу, к которому стремится
, равный пределу, к которому стремится при
при .
.
 . (1.1.19)
. (1.1.19)
Учитывая формулу (1.1.8), можно записать
 . (1.1.20)
. (1.1.20)
Ускорение точки в данный момент времени равно первой производной по времени от вектора скорости точки или второй производной по времени от радиус-вектора точки.
Ускорение точки при координатном способе задания движения
Пусть движение точки задается уравнениями (1.1.2). Формулу (1.1.20) с учетом зависимости (1.1.11) можно представить в следующем виде:  , (1.1.21)
, (1.1.21)
где  — (1.1.22)
— (1.1.22)
проекции ускорения точки на неподвижные оси декартовых координат.
Следовательно, проекции ускорения точки на неподвижные оси декартовых координат равны первым производным по времени от соответствующих проекций скоростей или вторым производным по времени от соответствующих координат.
Модуль ускорения точки равен
 , (1.1.23)
, (1.1.23)
а направление вектора  точки определяется направляющими косинусами:
точки определяется направляющими косинусами:
 . (1.1.24)
. (1.1.24)
1.1.4. Ускорение точки при естественном способе задания движения
При естественном способе задания движения с точкой М связывают сис-тему отсчёта, представляющую собой оси естественного трёхгранника
естественного трёхгранника (рис. 1.1.7).П – соприкасающаяся плоскость к кривой в точкеМ . Плоскость N, проведенная через точку
(рис. 1.1.7).П – соприкасающаяся плоскость к кривой в точкеМ . Плоскость N, проведенная через точку перпендикулярно касательной в этой точке называетсянормальной плоскостью. Любая прямая, проходящая через точку
перпендикулярно касательной в этой точке называетсянормальной плоскостью. Любая прямая, проходящая через точку и лежащая в этой плоскости является нормалью кривой в точке
и лежащая в этой плоскости является нормалью кривой в точке . Нормаль
. Нормаль , расположенная в соприкасающейся плоскости, называетсяглав-ной нормалью. Положительное направление главной нормали определяется ортом главной нормали
, расположенная в соприкасающейся плоскости, называетсяглав-ной нормалью. Положительное направление главной нормали определяется ортом главной нормали , направленным в сторону вогнутости кривой. Нормаль
, направленным в сторону вогнутости кривой. Нормаль , перпендикулярная соприкасающейся плоскости, называетсябинормальюк кривой в точкеМ. Положительное направление бинормали определяется ее ортом
, перпендикулярная соприкасающейся плоскости, называетсябинормальюк кривой в точкеМ. Положительное направление бинормали определяется ее ортом , причем
, причем , т.е. орты
, т.е. орты ориентированы друг относительно друга так же, как орты
ориентированы друг относительно друга так же, как орты правой прямоугольной декартовой системы координат. Плоскость
правой прямоугольной декартовой системы координат. Плоскость , проходящая через касательную и бинормаль, называетсяспрямляющей.
, проходящая через касательную и бинормаль, называетсяспрямляющей.
Т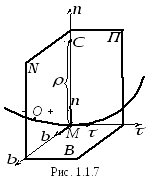 ри взаимно перпендикулярные оси: касательная
ри взаимно перпендикулярные оси: касательная , главная нормаль
, главная нормаль и бинормаль
и бинормаль образуютестественные осикривойв данной точке. Перемещаясь по кривой вместе с точкой
образуютестественные осикривойв данной точке. Перемещаясь по кривой вместе с точкой , естественные оси, оставаясь ортогональными, изменяют свою ориентацию в пространстве относительно неподвижной системы отсчета.
, естественные оси, оставаясь ортогональными, изменяют свою ориентацию в пространстве относительно неподвижной системы отсчета.
Разложим вектор  ускорения точки на естественные оси.
ускорения точки на естественные оси.
Дифференцируя выражение (1.1.17) скорости точки по времени, получаем
 . (1.1.25)
. (1.1.25)
Здесь первое слагаемое – составляющая вектора ускорения по касатель-ной к траектории –  . Второй множитель во втором слагаемом пред-ставим в виде
. Второй множитель во втором слагаемом пред-ставим в виде , где модуль
, где модуль — кривизна кривой в данной точкеМ. Вектор
— кривизна кривой в данной точкеМ. Вектор перпендикулярен орту
перпендикулярен орту и расположен в соприка-сающейся плоскости, его направление совпадает с направлением орта
и расположен в соприка-сающейся плоскости, его направление совпадает с направлением орта глав-ной нормали.
глав-ной нормали.
Радиусом кривизны кривой в данной точке  называется величина
называется величина  .
.
Следовательно, второе слагаемое в формуле (1.1.25) примет вид  и представляет собою составляющую ускорения точки по главной нормали.
и представляет собою составляющую ускорения точки по главной нормали.
Таким образом, ускорение точки при естественном способе задания её движения раскладывается на две составляющие: — ускорение  , направленное по касательной к траектории и называемоекасательнымилитангенциаль-ными ускорение
, направленное по касательной к траектории и называемоекасательнымилитангенциаль-ными ускорение , направленное по главной нормали к центру кривизны траектории и называемоенормальнымили центростремительным;
, направленное по главной нормали к центру кривизны траектории и называемоенормальнымили центростремительным;  ,
, .
.
В итоге, формулу (1.1.25) можно представить в виде
 . (1.1.26)
. (1.1.26)
Скалярные множители в (1.1.25) являются проекциями ускорения точки на касательную и главную нормаль:
 , (1.1.27)
, (1.1.27)
 . (1.1.28)
. (1.1.28)
Модуль касательного ускорения равен  . (1.1.29)
. (1.1.29)
Из зависимости (1.1.25) видно, что вектор ускорения точки  лежит в соприкасающейся плоскости и на бинормаль не проецируется, поэтому
лежит в соприкасающейся плоскости и на бинормаль не проецируется, поэтому .
.
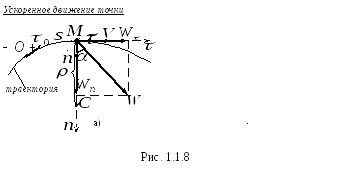
Касательное ускорение  характеризует быстроту изменения вектораскорости
характеризует быстроту изменения вектораскорости  по модулюи направлено в сторону скорости при ускоренном движении точки (рис. 1.1.8,а) и в противоположную сторону — при её замедленном движении (рис. 1.1.8,б).
по модулюи направлено в сторону скорости при ускоренном движении точки (рис. 1.1.8,а) и в противоположную сторону — при её замедленном движении (рис. 1.1.8,б).
Нормальное ускорение  характеризует быстроту изменения вектораскорости
характеризует быстроту изменения вектораскорости  по направлениюи направлено всегда в сторону вогнутости траектории. При
по направлениюи направлено всегда в сторону вогнутости траектории. При движение точки будет равномерным; при
движение точки будет равномерным; при точка движется прямолинейно.
точка движется прямолинейно.
Поскольку векторы  и
и взаимно перпендикулярны, то модуль ускорения равен:
взаимно перпендикулярны, то модуль ускорения равен:
 . (1.1.30)
. (1.1.30)
Вопросы для самопроверки по теме 1.1
1. Что является предметом теоретической механики?
2. Что называется механическим движением материальных тел?
3. В чем состоит метод абстракции в механике?
4. Какими способами задается движение точки?
5. Установите связь между векторным и координатным способами задания движения точки.
6. Как определяют траекторию движения точки, если заданы её уравне-ния движения в проекциях на декартовые оси?
7. Дайте определение скорости точки при векторном и координатном способах задания движения.
8. Дайте определение скорости точки при естественном способе задания её движения.
9. Дайте определение ускорения точки при задании её движения векторным и координатным способами.
10. Перечислите естественные оси, их орты и названия координатных плоскостей.
11. Чем орты естественных осей отличаются от ортов осей неподвижной декартовой системы отсчета?
12. Что характеризует касательное ускорение?
13. Что характеризует нормальное ускорение?
14. Как движется точка при  ?
?
15. Как движется точка при  ?
?
16. Какое движение точки называется равноускоренным, равнозамедлен-ным?
17. Назовите кривые, имеющие постоянный радиус кривизны.
18. Решите самостоятельно задачи 12.4(12.5), 12.9(12.10), 12.14(12.15), 12.22(12.23), 12.25(12.26) из [3].
Источник



