
iSopromat.ru

Рассмотрим три существующих способа задания движения материальной точки: координатный, векторный и естественный.
Чтобы иметь возможность определить параметры движения точки необходимо задать закон ее движения.
В зависимости от известных величин и поставленной задачи могут быть использованы следующие способы задания движения точки: векторный, координатный и естественный.
Векторный
При векторном способе задания движения положение точки определяется радиус-вектором, проведенным из неподвижной точки в выбранной системе отсчета.

Координатный
При координатном способе задания движения задаются координаты точки как функции времени:
Это параметрические уравнения траектории движущейся точки, в которых роль параметра играет время t. Чтобы записать ее уравнение в явной форме, надо исключить из них t.
Естественный
При естественном способе задания движения задаются траектория точки, начало отсчета на траектории с указанием положительного направления отсчета, закон изменения дуговой координаты: s=s(t). Этим способом удобно пользоваться, если траектория точки заранее известна.
Уважаемые студенты!
На нашем сайте можно получить помощь по техническим и другим предметам:
✔ Решение задач и контрольных
✔ Выполнение учебных работ
✔ Помощь на экзаменах
Источник
Способы задания движения точки
Для решения задач кинематики необходимо, чтобы изучаемое движение было задано. Оно считается заданным, если в любой момент времени однозначно можно определить положение точки в пространстве относительно заданной системы отсчета. Используют три основных способа задания движения точки: векторный, координатныйи естественный.
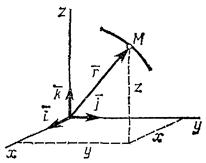
Векторный способ. Положение движущейся точки М в любой момент времени можно определить с помощью ее радиус-вектора, проведенного из центра О, связанного с телом отсчета, в точку М (рис. 1.1). Чтобы задать движение векторным способом, необходимо определить векторную функцию времени в виде:
 (1.1)
(1.1)
Зависимость (1.1) называют уравнением движения точки в векторной форме. Начало радиус-вектора движущейся точки находится в точке О, а конец его перемещается по траектории вместе с точкой М. Геометрическое место концов радиус-вектора, т.е. годограф этого вектора, определяет траекторию движущейся точки.
Координатный способ. С телом отсчета связывают прямоугольную систему декартовых координат, при этом положение точки определяют ее координатами, которые являются скалярными функциями времени (рис. 1.2):

 (1.2)
(1.2)
Уравнения (1.2) называют уравнениями движения точки в координатной форме. Они являются параметрическими уравнениями траектории точки. Исключив из этих уравнений параметр – время, можно получить уравнение траектории.
Между способами задания движения точки имеется связь. Так, если начало декартовой системы координат совпадает с центром, из которого проводится радиус-вектор точки при векторном способе изучения ее движения (см. рис. 1.2), то координаты точки равны проекциям на соответствующие оси радиус-вектора точки
 ,
,
где  – единичные орты координатных осей.
– единичные орты координатных осей.
Естественный способ. Этот способ используют в тех случаях, когда заранее известна траектория точки. На траектории выбирают неподвижную точку О (начало отсчета), а также положительное и отрицательное направления отсчета расстояний точки от начала отсчета (рис. 1.3). Тогда положение точки М на траектории будет однозначно определяться зависимостью криволинейной координаты S = ОМ от времени
 (1.3)
(1.3)
 Связь между координатным и естественным способами определяется выражением
Связь между координатным и естественным способами определяется выражением
 ,
,
где  – первые производные от координат точки по времени; С – постоянная интегрирования, зависящая от начальных условий.
– первые производные от координат точки по времени; С – постоянная интегрирования, зависящая от начальных условий.
Источник
Какими способами может быть задано движение точки
Движение. Виды движений. Описание движения. Система отсчета.
Механическим движением тела (точки) называется изменение его положения в пространстве относительно других тел с течением времени.
А) Равномерное прямолинейное движение материальной точки.
Б) Равноускоренное прямолинейное движение материальной точки.
В) Движение тела по дуге окружности с постоянной по модулю скоростью.
Г) Гармоническое колебательное движение. Важным случаем механического движения являются колебания, при которых параметры движения точки (координаты, скорость, ускорение) повторяются через определенные промежутки времени.
1. Векторный способ описания движения
ОПРЕДЕЛЕНИЕ: Векторный способ описания движения – это описание изменения радиус-вектора материальной точки в пространстве с течением времени.
Рассмотрим движение точки М в некоторой системе отсчета Oxyz (рис.1). Зададим радиус-вектор точки r — вектор, соединяющий начало координат с этой точкой.
При движении точки M вектор r будет с течением времени изменяться, т.е. будет каким-то образом зависеть от времени. Эта зависимость r = r ( t ) представляет собой закон движения в векторном виде.
В процессе движения конец радиус-вектора будет описывать траекторию, а его изменение – перемещение s точки.

2. Координатный способ описания движения
ОПРЕДЕЛЕНИЕ: Координатный способ описания движения – описание изменения во времени координат точки в выбранной системе отсчета.

В декартовой системе координат положение точки определяется тройкой чисел ( x , y , z ) — ее декартовыми координатами.
Чтобы задать закон движения точки, необходимо знать значения ее координат в каждый момент времени. Закон движения в координатном виде в общем случае представляет собой систему трех уравнений: x = x ( t ), y = y ( t ), z = z ( t )
Между векторным и координатным способом описания движения существует непосредственная связь, а именно: числовые значения проекций радиус-вектора движущейся точки на координатные оси системы с тем же началом отсчета равны координатам точки: rx = x , ry = y , rz = z .
3. Естественный способ описания движения
ОПРЕДЕЛЕНИЕ: Естественный способ описания движения – описание движения вдоль траектории. Этим способом пользуются, когда траектория точки заранее известна.
Пусть точка М движется вдоль траектории АВ в системе отсчета Oxyz (рис.3). Выберем на траектории какую-нибудь неподвижную точку О 1 , которую будем считать началом отсчета, и определим положительное и отрицательное направления. Тогда положение точки M будет определяться расстоянием S от точки О 1 . При движении точка М переместится в точку М 1 , соответственно изменится ее расстояние от точки О 1 . Таким образом, расстояние S зависит от времени, а характер этой зависимости позволит определить положение точки М на траектории в любой момент времени. Закон движения в этом случае имеет вид: s = s ( t ) .



Под системой отсчета понимают тело отсчета, которое условно считается неподвижным, систему координат, связанную с телом отсчета, и часы, также связанные с телом отсчета. В кинематике система отсчета выбирается в соответствии с конкретными условиями задачи описания движения тела.
Источник
Способы задания движения точки




![]()
![]()
СПОСОБЫ ЗАДАНИЯ ДВИЖЕНИЯ ТОЧКИ
Для задания движения точки можно применять один из следующих трех способов: 1) векторный, 2) координатный, 3) естественный.
1. Векторный способ задания движения точки. Пусть точка М движется по отношению к некоторой системе отсчета Oxyz. Положение этой точки в любой момент можно определить, задав ее радиус-вектор  , проведенный из начала координат О в точку М (рис. 1).
, проведенный из начала координат О в точку М (рис. 1).
При движении точки М вектор будет с течением времени изменяться и по модулю, и по направлению. Следовательно, является переменным вектором (вектором-функцией), зависящим от аргумента t:

Равенство (1) и определяет закон движения точки в векторной форме, так как оно позволяет в любой момент времени построить соответствующий вектор и найти положение движущейся точки.
Геометрическое место концов вектора , т. е. годограф этого вектора, определяет траекторию движущейся точки.
Аналитически, как известно, вектор задается его проекциями на координатные оси. В прямоугольных декартовых координатах для вектора будет: rx=x, ry=y, rz=z (см. рис. 1), где х, у, z — декартовы координаты точки. Тогда, если ввести единичные векторы (орты)  ,
,  ,
,  координатных осей, получим для выражение
координатных осей, получим для выражение

Следовательно, зависимость (2) от t будет известна, если будут заданы координаты х, у, z точки как функции времени. Такой способ задания движения точки (координатный) рассмотрим ниже. Вектор может быть задан, как известно, и иными способами, например его модулем и углами с осями или проекциями на оси других систем координат. Для получения общих формул, не зависящих от того, как конкретно задан вектор , будем исходить из векторного закона движения, представленного равенством (2).
2. Координатный способ задания движения точки. Положение точки можно непосредственно определять ее декартовыми координатами х, у, z, которые при движении точки будут с течением времени изменяться. Чтобы знать закон движения точки, т. е. ее положение в пространстве в любой момент времени, надо знать значения координат точки для каждого момента времени, т. е. знать зависимости

Уравнения (3) представляют собой уравнения движения точки в прямоугольных декартовых координатах. Они определяют закон движения точки при координатном способе задания движения. Если движение точки происходит все время в одной и той же плоскости, то, приняв эту плоскость за плоскость Оху, получим в этом случае два уравнения движения:

Наконец, при прямолинейном движении точки, если вдоль ее траектории направить координатную ось Ох, движение будет определяться одним уравнением (законом прямолинейного движения точки)

Уравнения (3) и (4) представляют собой одновременно уравнения траектории точки в параметрической форме, где роль параметра играет время t. Исключив из уравнений движения время t, можно найти уравнение траектории в обычной форме, т. е. в виде, дающем зависимость между координатами точки.
Пример. Пусть движение точки в плоскости Оху дано уравнениями:

где х, у выражены в сантиметрах; t— в секундах.
По этим уравнениям можно найти, что в момент времени t = 0 точка находится в положении М0 (0, 0), т. е. в начале координат, в момент t = lc — в положении M1 (2,12) и т д. Таким образом, уравнения (а) действительно определяют положение точки в любой момент времени. Давая t разные значения и изображая соответствующие положения точки на рисунке, можем построить ее траекторию.
Другим путем траекторию можно найти, исключив t из уравнении (а). Из первого уравнения находим t = x/2 и, подставляя это значение t во второе уравнение, получаем y = x 2 . Следовательно, траекторией точки является парабола с вершиной в начале координат и осью, параллельной оси Оу. Другие примеры определения траектории точки будут рассмотрены на практических занятиях.
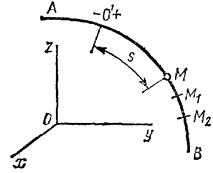
3. Естественный способ задания движения точки. Естественным (или траекторным) способом задания движения удобно пользоваться в тех случаях, когда траектория движущейся точки известна заранее. Пусть кривая АВ является траекторией точки М при ее движении относительно системы отсчета Oxyz (рис. 2). Выберем на этой траектории какую-нибудь неподвижную точку О’, которую примем за начало отсчета, и установим на траектории положительное и отрицательное направления отсчета (как на координатной оси). Тогда положение точки М на траектории будет однозначно определяться криволинейной координатой s, которая равна расстоянию от точки О’ до точки М, измеренному вдоль дуги траектории и взятому с соответствующим знаком. При движении точка М перемещается в положения Ml, М2,. . ., следовательно, расстояние s будет с течением времени изменяться. Чтобы знать положение точки М на траектории в любой момент времени, надо знать зависимость


Уравнение (6) и выражает закон движения точки М вдоль траектории.
Таким образом, чтобы задать движение точки естественным способом, надо задать: 1) траекторию точки; 2) начало отсчета на траектории с указанием положительного и отрицательного направлений отсчета; 3) закон движения точки вдоль траектории в виде s = f(t).
Заметим, что величина s в уравнении (6) определяет положение движущейся точки, а не пройденный ею путь. Например, если точка, двигаясь из начала О’, доходит до положения М1 (рис. 2), а затем, перемещаясь в обратном направлении, приходит в положение М, то в этот момент ее координата s = O’M, а пройденный за время движения путь будет равен O’M1 + M1M, т. е. не равен s.
Источник



